Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
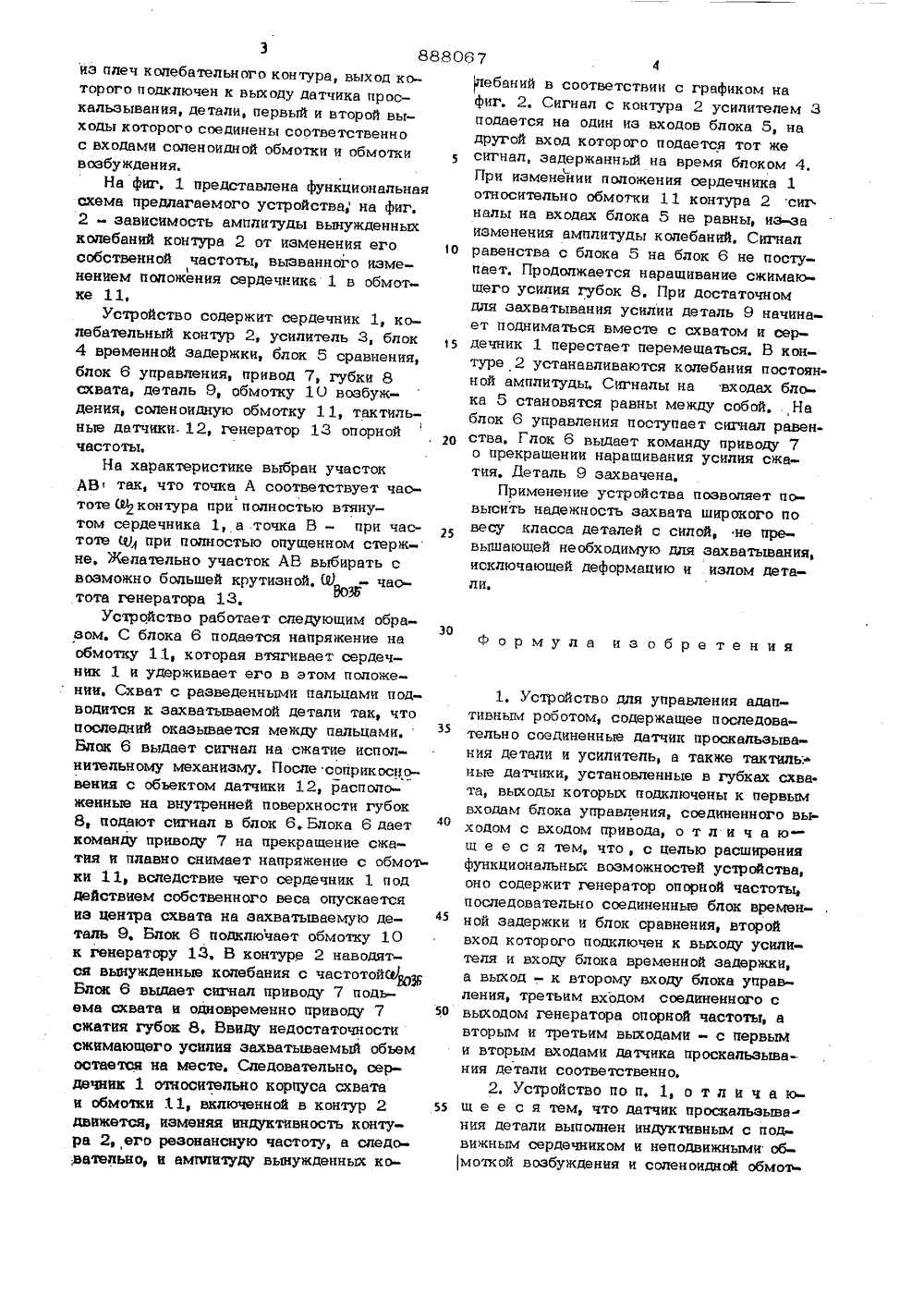
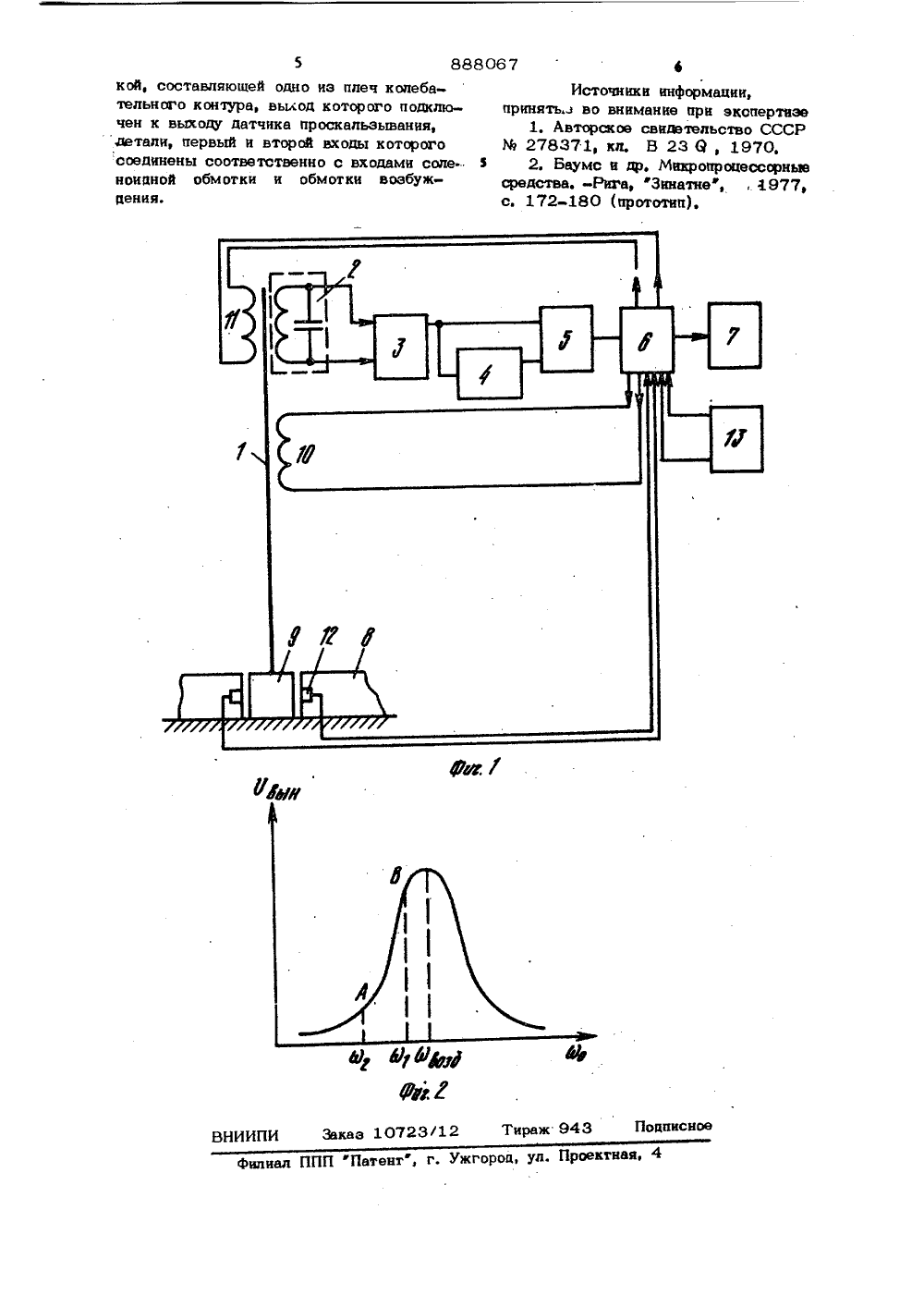
Союз СоветскнкСоциалистическихРесублкк ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(В 1) Дополнительное к авт. свнд-ву (22) Заявлено 27.03.80 (21) 2900107/18-24 с присоединением заявки рйм, кл.6 05 В 11/00 В 25 Я 13/00 Вйуйвротвеииыб коиитет СССР ао делан изобретеиий и открйтий(72) Авторы изобретения Куйбышевский политехнический институт им, В.В. Куйбышева(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМИзобретение относится к робототехнйке и может быть применено для автоматизации производственных процессов с применением роботов, снабженных очувстз- ленными захватами.Известно устройство для управления схватом манипулятора, содержащее датчик момента, сумматор, усилитель, привод и исполнительный механизм, который не обеспечивает сжимающего усилия,10 адекватного весу захваченной детали 11..Наиболее близким решением по технической сущности и достигаемому результату к изобретению является устройство2, свдэржащее последовательно соединент 5ные датчик проскальзывания детали и усилитель, а -:также тактильные датчики,установленные в губках схвата, выходыкоторых подключены к первым входамблока управления, соединенного выходомс входом привода,Недостатком этого устройства является дискретность управления изменением 2сжимающего усилия пальцев захвата, что приводит к несоответствию между сжимающим усилием и весом детали, а это в конечном счете приведет к деформации детали.Целью изобретения является расширение функциональных возможностей устройстваа. Устройство содержит генератор опорной частоты, последовательно соединенные блок временной .задержки и блок сравнения, второй вход которого подключен к выходу усилителя и блока временной задержки, а выход - к второму входу блока управления, третьим входом соединенного с выходом генератора опж ной частоты, а вторым и третьим выходами - с первым и вторым входами датчика проскальзывания детали соответственно, . датчик проскальзывания детали выполнен индуктивным с подвижным сердечником и неподвижными обмоткой возбуждения и соленоидной обмоткой, составляющей однолебаний в соответствии с графиком нафиг. 2. Сигнал с контура 2 усилителем 3подается на один из входов блока 5, надругой вход которого подается тот жесигнал, задержанный на время блоком 4.При изменении положения сердечника 1относительно обмотки 11 контура 2 сигналы на входах блока 5 не равны, из-ааизменения амплитуды колебаний, Сигналравенства с блока 5 на блок 6 не поступает, Продолжается наращивание сжимакщего усилия губок 8. При достаточномдля захватывания усилии деталь 9 начинает подниматься вместе с схватом и сердечник 1 перестает перемещаться. В контуре 2 устанавливаются колебания постоянной амплитуды, Сигналы на входах блока 5 становятся равны между собой. Наблок 6 управления поступает сигнал равенства. Глок 6 выдает команду приводу 7о прекращении наращивания усилия сжатия. деталь 9 захвачена,Применение устройства позволяет повысить надежность захвата широкого повесу класса деталей с силой, не превышающей необходимую для захватывания,исключающей деформацию и излом детали. 1. Устройство для управления адаптивным роботом, содержащее последовательно соединенные датчик проскальзывания детали и усилитель, а также тактиль: ные датчики, установленные в губках схвата, выходы которых подключены к первым входам блока управления, соединенного выходом с входом приводао т л и ч а ю - ш е е с я тем, что, с целью расширения функциональных воэможностей устройства, оно содержит генератор опорной частоты, последовательно соединенные блок временной задержки и блок сравнения, второй вход которого подключен к выходу усилителя и входу блока временной задержки, а выход - к второму входу блока управления, третьим входом соединенного с выходом генератора опорной частоты, а вторым и третьим выходами - с первыМ и вторым входами датчика проскальзывания детали соответственно.2. Устройство по и. 1, о т л и ч а ющ е е с я тем, что датчик проскальэыва ния детали выполнен индуктивным с подвижным сердечником и неподвижными обмоткой возбуждения и соленоидной обмоем 3 888067из плеч колебательного контура, выход которого подключен к выходу датчика проскальзывания, детали, первый и второй выходы которого соединены соответственнос входами соленоидной обмотки и обмоткивозбуждения.На фиг. 1 представлена функциональнаясхема предлагаемого устройства, на фиг,2 - зависимость амплитуды вынужденныхколебаний контура 2 от изменения его 1 особственной частоты, вызванного изме 1нением положения сердечника 1 в обмотке 11.Устройство содержит сердечник 1, колебательный контур 2, усилитель 3, блок4 временной задержки, блок 5 сравнения,блок 6 управления, привод 7, губки 8схвата, деталь 9, обмотку 10 возбуждения, соленоидную обмотку 11, тактильные датчики 12, генератор 13 опорнойчастоты.На характеристике выбран участокАВ так, что точка А соответствует частоте ОМконтура при полностью втянутом сердечника 1, а точка В - при частоте щ при полностью опушенном стержне. Желательно участок АВ выбирать свозможно большей крутизной. Ю - частота генератора 13,Устройство работает следующим обраЗОэом. С блока 6 подается напряжение наобмотку 11, которая втягивает сердечник 1 и удерживает его в этом положе нии, Схват с разведенными пальцами подводится к захватываемой детали так, чтопоследний оказывается между пальцами.Блок 6 выдает сигнал на сжатие исполнительному механизму. После соприкосновения с объектом датчики 12, расположенные на внутренней поверхности губок8, подают сигнал в блок 6.Блока 6 даеткоманду приводу 7 на прекращение сжатия и плавно снимает напряжение с обмоъ.ки 11, вследствие чего сердечник 1 поддействием собственного веса опускаетсяиэ центра схвата на захватываемую деталь 9, Блок 6 подключает обмотку 10к генератору 13, В контуре 2 наводятса вынужденные колебания с частотойЪ 3Блок 6 выдает сигнал приводу 7 подьема схвата и одновременно приводу 7 50сжатия губок 8. Ввиду недостаточностисжимающего усилия захватываемый обьемостается на месте. Следовательно, сердечник 1 относительно корпуса схватаи обмотки 11, включенной в контур 2 идвижется, изменяя индуктивность контура 2, его резонансную частоту, а следо,вательно, и амплитуду вынужденных коФормула изобретения888067 аэ 10723/12 Тираж 9 аписное ВНИИПИ илиал ППП "Патент, г. Ужгород, ул. Проектна 5кой, составляющей одно из плеч колебательного контура, вьиод которого подключен к выходу датчика проскальзывания, летали, первый и второй входы которого соединены соответственно с входами соле ноипной обмотки и обмотки возбужпения. 4Источники информации, принять.з во внимание при экспертизе1, Авторское свидетельство СССР % 278371, кл, Н 23 6, 1970.2, Баумс и щз. Микропроцессорные средства. -Рига, фЗинатнеф, 4.977, с. 172-180 (прототип).
СмотретьЗаявка
2900107, 27.03.1980
КУЙБЫШЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
КАРПОВ ЕВГЕНИЙ МАКСИМОВИЧ, КОРГАНОВА ОЛЬГА ГЕОРГИЕВНА, ЛОПАТКО СЕРГЕЙ АНАТОЛЬЕВИЧ, ЭЛЬКИНД ЮРИЙ ИСААКОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: адаптивным, роботом
Опубликовано: 07.12.1981
Код ссылки
<a href="https://patents.su/3-888067-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Сверхпроводящий преобразователь тока

Номер патента: 730232
Опубликовано: 07.09.1981
Автор: Мымриков
МПК: H01F 6/00, H01L 39/02
Метки: сверхпроводящий
...из первичной обмотки 3 и вторичных обмоток 4 и 5, первый СПК б и его обмотку управления 7, первый насыщающийся .дроссель 8 и его сигнальную обмотку 9, второй СПК 10 и его обмотку управления 11, второй насыщающийся дроссель 12 и его сигнальную обмотку 13, второй сверхпроводящий трансформатор тока 14, состоящий иэ первичной обмотки 15 и вторичных обмоток 1 б и 17, третий СПК 18 и егообмотку управления 19; третий насыщающийся дроссель 20 и его сигнальную обмотку 21; четвертый СПК 22 и его обмотку управления 23, четвертый насыщающийся дроссель 24 и его сигнальную обмотку 25; сверхпроводящую нагрузку 2 б, блок управления 27, электронный ключ 28, блок 29 эталонного напряжения, блок 30 циклическогореверсированияВ момент времени (,-,...
Сверхпроводящий преобразователь тока
Номер патента: 908224
Опубликовано: 30.10.1994
Автор: Мымриков
Метки: сверхпроводящий
СВЕРХПРОВОДЯЩИЙ ПРЕОБРАЗОВАТЕЛЬ ТОКА, содержащий сверхпроводящий трансформатор, первичная обмотка которого соединена с выходом источника переменного тока, вторичная обмотка, выполненная со средней точкой, подключена своими выводами к плечам двухполупериодного выпрямителя, каждое из которых выполнено на сверхпроводящем ключе и дросселе насыщения с прямоугольной петлей гистерезиса, подключенных к соответствующим выводам блока управления, причем управляющий вход источника переменного тока подключен к выходу электронного ключа, один вход которого соединен с блоком эталонного напряжения, а другой вход - с соответствующим выводом блока управления, отличающийся тем, что, с целью увеличения КПД, в него введены два импульсных источника тока и два...
Способ обработки металлических изделий и устройство для его осуществления

Номер патента: 1399355
Опубликовано: 30.05.1988
Авторы: Бансявичюс, Волков, Долгин
МПК: C21D 1/04
Метки: металлических
...определенный сигналблока слежения. В этом случае вибростенд, управляемый блоком слежения,поддерживает стабильно частоту воз-буждения конструкции до тех пор, пока сосредоточенная масса не начнетперемещаться вдоль стержневой конструкции, Сосредоточенная масса двигается вдоль стержневой конструкциинепрерывно с минимальной скоростью,позволяющей обработать стержневуюконструкцию во всех точках равномерно, возбуждая в них максимальные напряжения. При перемещении массы показания преобразователей отличаютсядруг от друга и блок слежения вырабатывает сигнал для перестройки частотывибростенда таким образом, чтобы получить наибольшее смещение свободногоконца конструкции по сравнению сосмещением массы, Этим добиваются резонанса...
Способ автоматического управления процессом сушки угля в паровых трубчатых сушилках и устройство для его осуществления

Номер патента: 1700342
Опубликовано: 23.12.1991
Авторы: Бардамид, Копаница, Симонов, Смирнов, Тесов
МПК: F26B 25/22
Метки: паровых, процессом, сушилках, сушки, трубчатых, угля
...1 поступают в третье вычислительное устройство 21, в котором вычисляется фактическая производительность 10сушилки по уравнению регрессии01= Ао+ А 1 1 тс + А 2и, (4)где тс, и - соответственно темпеоатура торцовой стенки и частота вращения барабана1, 15Фактическая производительность сушилки может быть определена также по току двигателя барабана 1.Сигналы с вычислительных устройств 20и 21 поступают во второй блок 18 сравнения, из которого сигналы рассогласованияпоступают на первый вход регулятора 7 производительности сушилки, в котором вырабатывается регулирующее воздействие дляисполнительного механизма 9, регулирующего степень открытия шибера 13, установленного в бункере исходного угля,Сигнал с второго вычислительного устройства 20...
Устройство для контроля консистенции бетонной смеси в процессе ее приготовления

Номер патента: 1775046
Опубликовано: 07.11.1992
Авторы: Данилевский, Иванов, Терехов
МПК: G01N 33/38
Метки: бетонной, консистенции, приготовления, процессе, смеси
...датчика периодов оборотов 2. Реле времени 3 спустя заданное время (необходимое для стабилизации свойств бетонной смеси в бетоносмесителе) подключает выход датчика вибрации 1 ко входу ключа 19, а выход датчика периода 2 к управляющим входам интегратора 7, блока выборки и хранения 8, блока деления сигналов 9, блока памяти 10, счетчика 16 и входом синхронизируемого генератора 15.Зависимость амплитуды вибрации стенок бетоносмесителя от времени носит периодический характер, Период зависимости равен периоду оборотов бетоносмесителя.Если рассмотреть зависимость амплитуды вибрации от времени в течение периода (см.фиг.2), то видно, что на некоторых участках графика (например, интервал от точки 5 до 19) сигнал имеет низкий уровень и...
Предыдущий патент: Устройство для измерения временных интервалов
Следующий патент: Устройство для управления технологическим процессом
Случайный патент: Устройство для отделки бетонных изделий