Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 883872
Авторы: Дубовский, Найденов, Руткевич, Филиппович
Текст
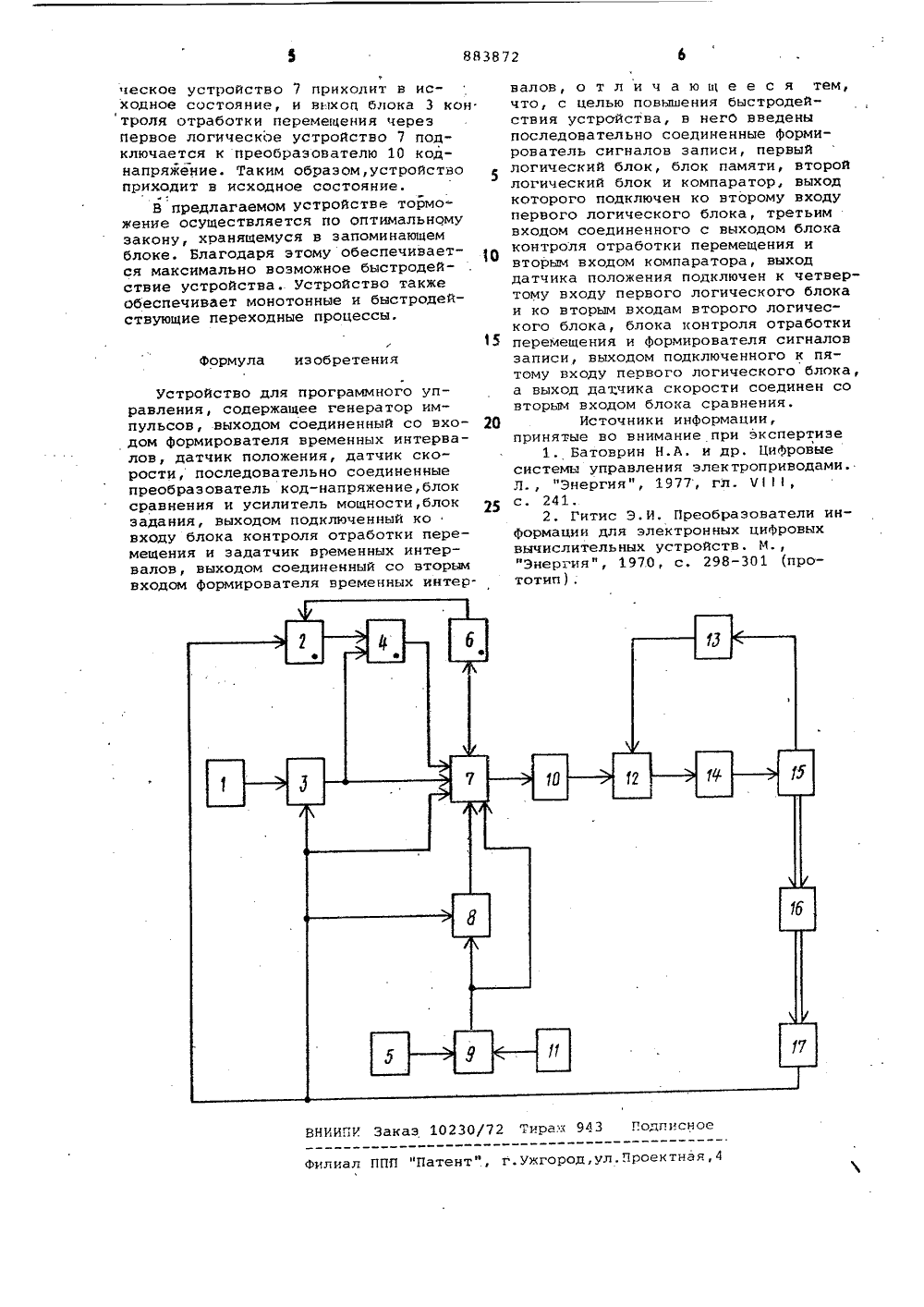
Сфефз Сфветскнк Сфциалнстичфсни в Реслублин(51) М. Кл.з с присоединением заявки йо(23) Приоритет 6 05 В 19/18 ГосударствениыЯ комитет СССР но делам изобретениЯ и открытнЯОпубликовано 23,11,81. Бюллетень Й 943 Дата опубликования описания 23. 11. 81(72) Авторы изобретения И.В. Руткевич, В.Н. Филиппович,. Г.А. Найденов и В.А. Дубовский 4) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ м т х устр ействи ования исполн вается ичины тельна пряассогИзобретение относится к система программного управления и может бы ь использовано, например, в системах управления электроприводами роботов. 5 манипуляторов, а также в системах автоматического управления, применяемых в самых различных областях промышленности.Известна цифровая система управления, содержащая последовательно соединенные задающее устройство,сравнивающее устройство (цифровой сумматор)., регистр управления, преобразователь код-напряжение, корректирующее устройство, усилительно-пре образовательное устройство, исполнительный двигатель; механически связанный через редуктор с кодовым датчиком, выход которого подключен ко входу сравнивающего устройства, и 20 блок синхронизации (11 .Наиболее близким к предлагаемому изобретению по технической сущности является устройство для программного управления, содержащее последователь" но соединенные задающий блок, блок контроля отработки перемещения (сумматор), преобразователь код-напряжение, блок сравнения, усилитель мощности, исполнительный двигатель,механически связанный через редуктор с датчиками положения и скорости, выходы которых подключены ко второму входу блока контроля отработки перемещения и ко второму входу блока сравнения 21.Недостатком известны ойств является низкое быстрод е и возможность перерегулир Это объясняется тем, что к и ному двигателю прикладыжение, зависящее от вел Р ласования.Цель изобретения - повышение быстродействия.Поставленная цель достигается тем, что в устройство для программного управления, содержащее генератор импульсов, выходом соединенный со входом формирователя временных интервалов, датчик положения, датчик скорости, последовательно соединенные преобразователь код-напряжение, блок сравнения и усилитель мощности, блок задания, выходом подключенный ко входу блока контроля отработки перемещения и эадатчик временных интервалов, выходом соединенный со вторым входом формирователя временных интервалов, введены по 883872следовательно соединенные формирователь сигналов записи, первый логический блок, блок памяти, второй логический блок и компаратор, выходкоторого подключен ко второму входупервого логического блока, третьимвходом соединенный с выходом блокаконтроля отраьотки перемещения и вторым входом компаратора, выход датчика положения подключен к четвертомувходу первого логического блока и ковторым входам второго логического блока,блока контроля отработки перемещенияи формирователя сигналов записи,выходом подключенного к пятому входупервого логического блока, а выходдатчика скорости соединен со вторымвходом блока сравнения.На чертеже представлена блок-схемаустройства,Устройство содержит блок 1 заданиявторой логический блок 2,блок 3 контроля отработки перемещения, компаратор 4, задатчик 5 временных интервалов, блок 6 памяти, первый логический блок 7, формирователь 8 сигналов .записи, формирователь 9 временных интервалов, преобразователь 10 код-напряжение, генератор 11 импульсов,блок 12 сравнения, датчик 13 скорости,усилитель 14 мощности, исполнительныйдвигатель 15, нагрузка 16, датчик 17положения.Блок 1 задания задает величину инаправление требуемого перемещениянагрузки в виде двоичного кода,Первый и второй логические блоки 7 и 2устройства выполняют логические функции. Блок 3 контроля отработки перемещения сравнивает величину требуемого перемешения с величиной действительного положения нагрузки 16;поступающей с выхода датчика 17 положения, и выдает на выход величину разности. Компаратор 4 сравнивает кодна выходе блока 3 контроля отработкиперемещения либо с кодом на выходеблока 6, либо с кодом на выходе датчика 17 положения. Задатчик 5 передает величину выбранного операторомвременного интервала в Формирователь9 временного интервала, в которомпроисходит подсчет импульсов, поступающих с генератора 11 импульсов, иФормируются сигналы в конце каждоговременного интервала.В блоке 6 памяти хранится закон оптимального изменения скорости при торможении. Формирователь 8 сигналов записи сравнивает приращения координат за, текуший интервал времени с предыдущим. Блок 12 сравнивает желаемое значение скорости с действительным и выдает значение их разности на усилитель 14 мошности. Блок 12 сов местно с усилителем 14 мощности, исполнительным органом 15, датчиком 13 скорости, нагрузкой 16, датчиком 17 положения и блоком 3 контроля отра 15 2025 ЗО35 40 45 ботки перемешения образуют контурырегулирования по скорости и по положению.Устройство работает следующим образом,Сигнал из блока 1 поступает на блок 3 и через блок 7,преобразователь 10 код-напряжение и блок 12 сравнения поступает на усилитель 14 мощности, Устройство начинает разгон.В формирователь 8 сигналов записи поступают сигналы от блока 9 и информация о перемещении исполнительногооргана. В блоке 8 происходит сравнение прирацений координат за текущий интервал времени с предыдущимиесли эта величина прирацеиия превышает допустимое отклонение по скорости, то на выходе формирователя 8 формируется сигнал записи; при равенстве приращений происходит обобщение движения в двух, трех и т.д. интервалах времени. ОбобШение происходит до тех пор, пока неравенство приращений не составит величины, превышающей допустимое отклонение от скорости, после чего формируется сигнал записи.По этому сигналу происходит запись в блок 6 памяти информации о перемешении, поступаюцей с датчика 1.7 положения, и информации о величине временного интервала, за который произведено это перемещение, поступающей с формирователя 9. Запись прекращается с переходом устройства на режим движения с постоянной скоростью, т.е.,в момент окончания разгона.1На выходе первого логического блока 7 устанавливается последний записанный в блоке 6 код. При равенстве оставшегося пути перемещения значению пути разгона код на выходе блока 3 контроля отработки перемещения становится равным последнему, записанному в блоке 6 коду, и на выходе коммутатора 4 появляется сигнал, по которому из блока 6 происходит дискретная выборка значений скорости, соответствующих оптимальномузакону торможения (в обратном порядкепо сравнению с режимом разгона),Приперемещениях на малые расстояния,т,е. в случаях когда устройство, не выходя на режим движения с постоянной скоростью, должно тормозиться, второе логическое устройство 2 отсылает в компаратор 4 не последний записанный в блоке 6 памяти код, а показания цатчика 17 положения, где происходит сравнение показаний датчика 17 положения с кодом на выходе блока 3.60 контроля отработки перемещения. Присовпадениикодов начинается торможение аналогично описанному. С окончанием процесса торможения на выходе блока 3 контроля отработки перемещения появляется "О", первое логи5Формула изобретения Устройство для программного управления, содержащее генератор импульсов, выходом соединенный со вхо дом формирователя временных интервалов, датчик положения, датчик скорости, последовательно соединенные преобразователь код-напряжение, блок сравнения и усилитель мощности, блок задания, выходом подключенный ко входу блока контроля отработки перемещения и задатчик временных интервалов, выходом соединенный со вторым входом формирователя временных интерНКИПИ Заказ 10230/72 Тиран 943 Подписное Ужгород,ул.Проектная,4 тентф тиал П ческое устройство 7 приходит в исходное состояние, и выхоП блока 3 кон троля отработки перемещения через первое логическое устройство 7 подключается к преобразователю 10 коднапряжение. Таким образом,устройство приходит в исходное состояние.В предлагаемом устройстве торможение осуществляется по оптимальному закону, хранящемуся в запоминающем блоке. Благодаря этому обеспечивается максимально возможное быстродействие устройства. Устройство также обеспечивает монотонные и быстродействующие переходные процессы. валов, о т л и ч а ю щ е е с я тем,что, с целью повышения быстродействия устройства, в негО введеныпоследовательно соединенные формирователь сигналов записи, первыйлогический блок, блок памяти, второйлогический блок и компаратор, выходкоторого подключен ко второму входупервого логического блока, третьимвходом соединенного с выходом блокаконтроля отработки перемещения ивторым входом компаратора, выходдатчика положения подключен к четвертому входу первого логического блокаи ко вторым входам второго логического блока, блока контроля отработкиперемещения и формирователя сигналовзаписи, выходом подключенного к пятому входу первого логического блока,а выход датчика скорости соединен совторым входом блока сравнения.Источники информации,принятые во внимание при экспертизе1. Батоврин И.А. и др. Цифровыесистемы управления злектроприводами.Л., "Энергия", 1977, гл. Ч 111,с, 241.2. Гитис Э.И. Преобразователи информации для электронных цифровыхвычислительных устройств. М.,
СмотретьЗаявка
2900345, 28.03.1980
ПРЕДПРИЯТИЕ ПЯ А-1477
РУТКЕВИЧ МИХАИЛ ВАСИЛЬЕВИЧ, ФИЛИППОВИЧ ВАЛЕРИЙ НИКОЛАЕВИЧ, НАЙДЕНОВ ГЕННАДИЙ АЛЕКСЕЕВИЧ, ДУБОВСКИЙ ВЛАДИМИР АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного
Опубликовано: 23.11.1981
Код ссылки
<a href="https://patents.su/3-883872-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Устройство для преобразования перемещения объекта в код

Номер патента: 1795546
Опубликовано: 15.02.1993
Авторы: Бабий, Берзин, Клепиков, Погорелов
МПК: H03M 1/28
Метки: код, объекта, перемещения, преобразования
...случай с опережающимиимпульсами, поступающими с первого вы 15 20253035 40 455055 мирователь 6, Формирователь 6 вырабатывает положительный импульс, который через открытый ключ на элементе И 8 поступает на суммирующий вход реверсивного счетчика 9, При приходе импульса со второго выхода импульсного датчика 1 на входе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 4 появляется кодовая комбинация 1-1, а на выходе появится низкий уровень, который запускает формирователь 6. Формирователь 6 вырабатывает положительный импульс, а так как элемент задержки 2 задерживает переключение элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 3, на входе которого еще сохраняется кодовая комбинация 0-1 и на выходе присутствует высокий уровень, то второй положительный импульс с формирователя 6 через ключ...
Устройство контроля преобразователя угловых перемещений вала в код

Номер патента: 1179526
Опубликовано: 15.09.1985
Авторы: Домрачев, Креславский, Мейко, Подрезов, Юзвинкевич
МПК: H03M 1/10
Метки: вала, код, перемещений, преобразователя, угловых
...для прохождения через нихсигналов, Сигнал нулевого кода, длительность которого больше временизадержки распространения в дешифраторе 4 нулевого кода и триггере 5,через элемент И 6 поступает на второйинформационный вход распределителя 9, Распределитель 9 собран наэлементах И-ИЛИ, при нулевом состоянии триггера 20 сигналы с первогоинформационного входа попадают напервый выход, а с второго информационного входа на второй выход. Поэтому сигнал нулевого кода с второгоинформационного входа распределителя 9 поступает на Я-вход триггера10, опрокидывая его в единичноесостояние,1Высокий потенциал с выхода триггера 10 поступает на его Э-и К-входы, на вход элемента И 12. Импульсы с генератора 11 через элемент И 12 поступают на счетный вход счетчика...
Двухотсчетный электромеханический преобразователь углового положения вала в цифровой код

Номер патента: 585515
Опубликовано: 25.12.1977
Авторы: Любимов, Павлов, Смирнов
МПК: G08C 9/00
Метки: вала, двухотсчетный, код, положения, углового, цифровой, электромеханический
...6 через соответствующие дешифраторы грубого и точного отсчетов 9 подключены к входам бпоков 25 ключей грубого отсчета 10 и точного отсче - та 11, Выходы грубого отсчета датчика подключены к одной группе входов ключей переменного тока 12, другая группа входов которых соединена с выходами элементов шунтирования грубого Отсчета, Выход киочей переменного тока 12 через усилитель переменного тока 13 и вентиль, 14 подключен к одному из входов элемента И 15, к другому входу которого подключен выход пер 35 вого элемента шунтирования точного отсчета, Выход элемента И 15 соединен с блоком управления 16 и через элемент НЕ 17 - с блоком управления 18, выходы которых подключены к другим входам блоков ключей40 грубого отсчета 10. Выходы блоков...
Двухотсчетный электромеханический преобразователь углового положения вала в цифровой код

Номер патента: 670953
Опубликовано: 30.06.1979
Авторы: Любимов, Павлов, Смирнов
МПК: G08C 9/00
Метки: вала, двухотсчетный, код, положения, углового, цифровой, электромеханический
...элемента 27, выход преобразующего блока эталонного сигнала 22 подключен к одному входу блока делителя эталонного сигнала 23, выход которого соединен с другим входом сравнивающего элемента 2. Выход генератора импульсов 24 соединен со входом дслптсля частоты 25 и одним из входов реверсивного счетчика 26, второй вход реверсивного счетчика подключен к выходу сравнивающего элемента, Выходы реверсивного счетчика соединены со входами блока ключей 28 и с группой входов дслителя эталонного сигнала, выход блока ключей подключен ко входу блока индикации 19, Работа преобразователя заключается в следующем. Угловое положение входного вала преобразователя преобразуется поворотными трансформаторами 2 и 3 в напряжения, снимаемые с выходных обмоток гфаз)...
Преобразователь положения луча в цифровой код
Номер патента: 243966
Опубликовано: 01.01.1969
Автор: Квасов
МПК: G06K 11/02
Метки: код, луча, положения, цифровой
...вентилей 20 и 21, Нулевой выход триггера 27 соединен с управляющим входом вентиля 1 б, а его единичный выход - с управляющими входами вентилей 22 и 23,Устройство управления преобразователя с помощью коммутатора 11 по нечетным тактам обеспечивает поочередную подачу напряжения на индивидуальные электроды 8 и одновременную запись результата ,преобразования в счетчик 3 (причем вплоть до опроса первого возбужденного приемника излучения на счетчик 3 поступают как нечетные, так и четные тактовые импульсы).По окончании опроса, первого возбужденного приемника излучения устройство управления обеспечивает подачу на счетный вход счетчика 3 лишь четных . тактовых импульсов в количестве, на единицу меньшем числа одновременно возбужденных....
Предыдущий патент: Устройство для управления подачей шлифовального станка
Следующий патент: Устройство для программного управления формовочной линией
Случайный патент: Способ лечения хронического гломерулонефрита