Устройство программного управлениястендом для испытаний изделий напрочность
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 838665
Авторы: Буланов, Дудник, Кондратенко, Костин, Мазняк, Паценкер, Пугин, Соколянский, Тимченко, Хильченко



Текст
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(22) Заявлено 02.10.79 (21) 2824с присоединением заявки НВ(23) ПриоритетОпубликовано 150681. ЬюллеДата опубликования описаиия 1 718(51) М. Кл. 5/ С 05 8 19/ С 01 й 3/О Государственный комитет СССР по дедам изобретений и открытийт гМ титут. Заявител ьковский авиационньп 4) УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА ПРОЧНОСТЬ ие относится к исп ике, а именно к ус ного управления таний изделий на и т быть использованта- ой 2 Изобретен ытельной техн трствам программ стендом для испы рочность и може о вавиастроении,По основному авт .св . Р 607185известно устройство программногоуправления стендом для испытаний изделии на прочность, содержащее блокхранения максимальных усилий, блокзадания усилий, соединенный с электрогидравлическими следящими приводами с обратной связью по усилию,включающими входной сумматор, масштабный блок, блок выделения сигналаошибки, усилитель ошибки, электро-гидравлический преобразователь, гидравлическии силовозбудитель,датчикусилии, блок задания положения объекта, блок координат силовозбудителей,блок стабилизации положения изделия,блок пространственного масштабирования, состоящий из узлов коррекцииположения изделия для каждого каналанагружения и блок координат силовозбудителей, при этом один вход блокастабилизации соединен с блоком задания положения изделия, второй входсоединен с датчиками положекия изделия, третий вход соединен с блоком задания усилий, а выходы блока стабилизации соединены со входами всех узлов коррекции положения, вторые входы которых соединены с блоком координат силовозбудителей, причем выходы узлов коррекции положения соединены со входами входных сумматоров соответствующих каналов кагружекия.Данное устройство обеспечивает многоканальное программное нагруженйе изделий.Сигналы датчиков положения поступают в блок стабилизации, где сравниваются с сигналами заданного положения. На выходе блока стабилизации появляются сигналы, пропорциональные рассогласованию сигналов заданного и действительного положения конструкции, Блоком пространственного масштабирования формируются сигналы, которые используются для коррекции положения конструкции. Чем больше разбаланс внешних сил, тем при большем смещении конструкции от заданного начального положения будут достигнуты необходимые для уравновешивания величины корректирующих сигналов 11.Однако сигналы блока стабилизации можно подавать только на группы силовозбудителеи, оказывающих на конструкцию одноименное воздейстние по перемещению. Это снижает точность воспроизведения прикладываемых в процессе испытаний нагрузок на конструкцию и повышает погрешность в нагрузках от корректирующих воздействий системы стабилизации положения конструкции. 10Кроме того, устройство не позволяет в стдельных случаях, исключить один или несколько каналов из системы стабилизации.Цель изобретения - повышение точности воспроизведения нагрузки.Указанная цель достигается тем, что устройство снабжено инверторами, подключенными к выходу блока стабилизации, и, в каждом канале нагружения, коммутатором корректирующих 20 сигналов, подключенным нходами к выходам блока стабилизации, а выходами - ко входам узла коррекции.На чертеже представлена блок-схема устройства. 25Устройство содержит п следящих приводов 1 с обратной связью по усилию, каждый из которых включает последовательно соединенные нходной сумматор 2, масштабирующии 3 О блок 3, блок 4 выделения сигнала ошибки, усилитель 5 ошибки, злектрогидравлический преобразователь б, гидравлический силовоэбудитель 7 и датчик 8 усилий, блок 9 задания поло кони объекта, блок 10 координат силовозбудителей, блок 11 стабилизации положения изделия, блок 12 пространственного масштабирования, состоящий из узлов 13 коррекции положения изделия для каждого канала, блок 4 О 14 задания усилии, блок 15 хранения максимальных усилий, датчики 16 положения иэделия, инверторы 17 на выходе блока 11 стабилизации и коммутаторы 18 корректирующих сигналов. У 1+ УЗ + У 4-- = кУ 1е Де с 5 О Устройство программного управления стендом для испытаний изделий 6 О на прочность по авт,св, Р 607185,о т л и ч а ю щ е е с я тем, что, с цЕлью повышения точности воспроизведения нагрузки, оно снабжено инверторами, подключенными к выходу блока стабилизации, и, в каждом каустройство работает следующим образом,Переменный во времени сигнал блока 14 задания усилий подается на входы сумматоров 2 каналов нагружения. Масштабирующие блоки 3, настроенные н соответствии с данными загрузочной таблицы, хранимой н виде значений максимальных усилий в блоке 15, обеспечивают воспроизведение требуемых в каждой точке нагрузок. Четыре базовых датчика 16 положения изделия выдают на блок 11 стабилизации сигналы У,У 1, У, У 4, пропорциональные действительному по, ложению объекта, В блоке 11 производится их обработка по следующим зависимостям: где Н - вертикальное смещениеобзекта;3" " угол крена;с - угол тангажа;е - база между парными датчиками.На другие входы блока 11 стабилизации с блока 9 задания положения объекта подаются сигналы заданного положения объекта Н Яо, соПри смещении иэделия относительно заданного положения, благодаря инверторам 17, на парных шинах появляются синфазные сигналыН - кор+ / рекции вертикального положения, - З. тангажа и +- крена конструкции. Коммутатор 18 подключает данный канал к соответствующим шинам блока 11 стабилизации, в зависимости от пространственного положения гидравлического силовозбудителя 7 относительно изделия, Сигналы с выходов коммутатора 18 поступают на входы узлов 13 коррекции блока 12 пространственного масштабирования. На вторые входы узлон 13 поступают значения координат с блока 10, отражающие пространственное расположение -го силовозбудителя 7 и производится их умножение на сигналы рассогласования положения изделия. На ныходах узлов 13 блока 12 формируются сигналы коррекции, величины которых изменяются по кососимметричному закону в зависимости от значения координаты силовозбудителя 7. Устроиство позволяет нагружать. изделие одним из следующих способов; уменьшением нагрузки, действующей вверх, увеличением нагрузки,действующей вниз, одновременным уменьшением нагрузки, деиствующеи вверх и увеличением нагрузки, деиствующей вниз. Изобретение повышает точностьвоспроизведения прикладываемых попрограмме нагрузок. Формула изобретения8386 б 5 Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССРУ 607185, кл, С 05 В 19/02, 19784/5 Филиал ППП "Патент", г. Ужгород, ул. Проектна нале нагружения, коммутатором корректирующих сигналов, подключенным входами к выходам блока стабилизации,а выходами - ко входам узла коррекции. ВНИИПИ Госу по делам13035, Москв Подписноемитета СССРоткрытийая наб., д.
СмотретьЗаявка
2824315, 02.10.1979
ХАРЬКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
БУЛАНОВ ВИТАЛИЙ ВЛАДИМИРОВИЧ, ДУДНИК МИХАИЛ ФЕДОРОВИЧ, КОНДРАТЕНКО ЕВГЕНИЙ АНДРЕЕВИЧ, КОСТИН ВАЛЕРИЙ ЛЕОНИДОВИЧ, МАЗНЯК ЯКОВ АНДРЕЕВИЧ, ПАЦЕНКЕР БОРИС ЛЬВОВИЧ, ПУГИН АЛЕКСАНДР ПАВЛОВИЧ, СОКОЛЯНСКИЙ ВАЛЕРИЙ ПЕТРОВИЧ, ТИМЧЕНКО ВЛАДИМИР ИВАНОВИЧ, ХИЛЬЧЕНКО АЛЕКСЕЙ ГРИГОРЬЕВИЧ
МПК / Метки
МПК: G01N 3/02, G05B 19/02
Метки: испытаний, напрочность, программного, управлениястендом
Опубликовано: 15.06.1981
Код ссылки
<a href="https://patents.su/3-838665-ustrojjstvo-programmnogo-upravleniyastendom-dlya-ispytanijj-izdelijj-naprochnost.html" target="_blank" rel="follow" title="База патентов СССР">Устройство программного управлениястендом для испытаний изделий напрочность</a>
Генератор случайных сигналов с заданным дискретным законом распределения амплитуд
Номер патента: 1735847
Опубликовано: 23.05.1992
МПК: G06F 7/58
Метки: амплитуд, генератор, дискретным, заданным, законом, распределения, сигналов, случайных
...катодов декатрона.Управляемый вероятностный элементна основе газоразрядного прибора(например, коммутатирного декатронас десятью устойчивыми состояниями)используется для построения генера"тора случайных сигналов с заданнымдискретным законом распределенияамплитуд.С этой целью расширяют возможнос"ти используемого управляемого вероятностного элемента и увеличивают число его возможных состояний, Для этоговыход каждого катода декатрона черезразделительный конденсатор соединенО. с входом соответствующего электронного ключа аналогичного ключу 12(Фиг.3), а.выход каждого ключа сое"динен с резистором анодной цепи соответствуюц 1 его источника случайнос-25 тей аналогичного источнику 13 наФиг,3. Блок-схема соединения 1 фиг,4)представляет собой...
Приспособление для стабилизации блока-баласта в цепных водоподъемных аппаратах

Номер патента: 6212
Опубликовано: 31.08.1928
Автор: Трембовельский
МПК: F04B 9/02
Метки: аппаратах, блока-баласта, водоподъемных, стабилизации, цепных
...скреплен шарни ным соединением со стойкой 3, которая может быть прикреплена к какому- либо неподвижному основанию. На чертеже, например, стойка показана прикрепленной к грузу, лежащему на дне водовместилища, показанному на чертеже пунктиТак как вилка 2 шарнирно соединена со стойкой 3, то водоподемная бесконечная гибкая связь, например, спираль 4, охватывающая блок-баласт (пунктир на чертеже), находится всегда в натянутом состоянии, вследствие собственного веса блока-баласта, стремящегося оттянуть ее книзу, Для регулирования степени натяжения водоподемной спирали, рычаг вилки 2 можетбыть продолжен и на этом продолжении 5 помещен противовес б(пунктир на чертеже), который может быть передвигаем и закрепляемв любой точке на...
Формирователь сигналов с заданным законом изменения фазы
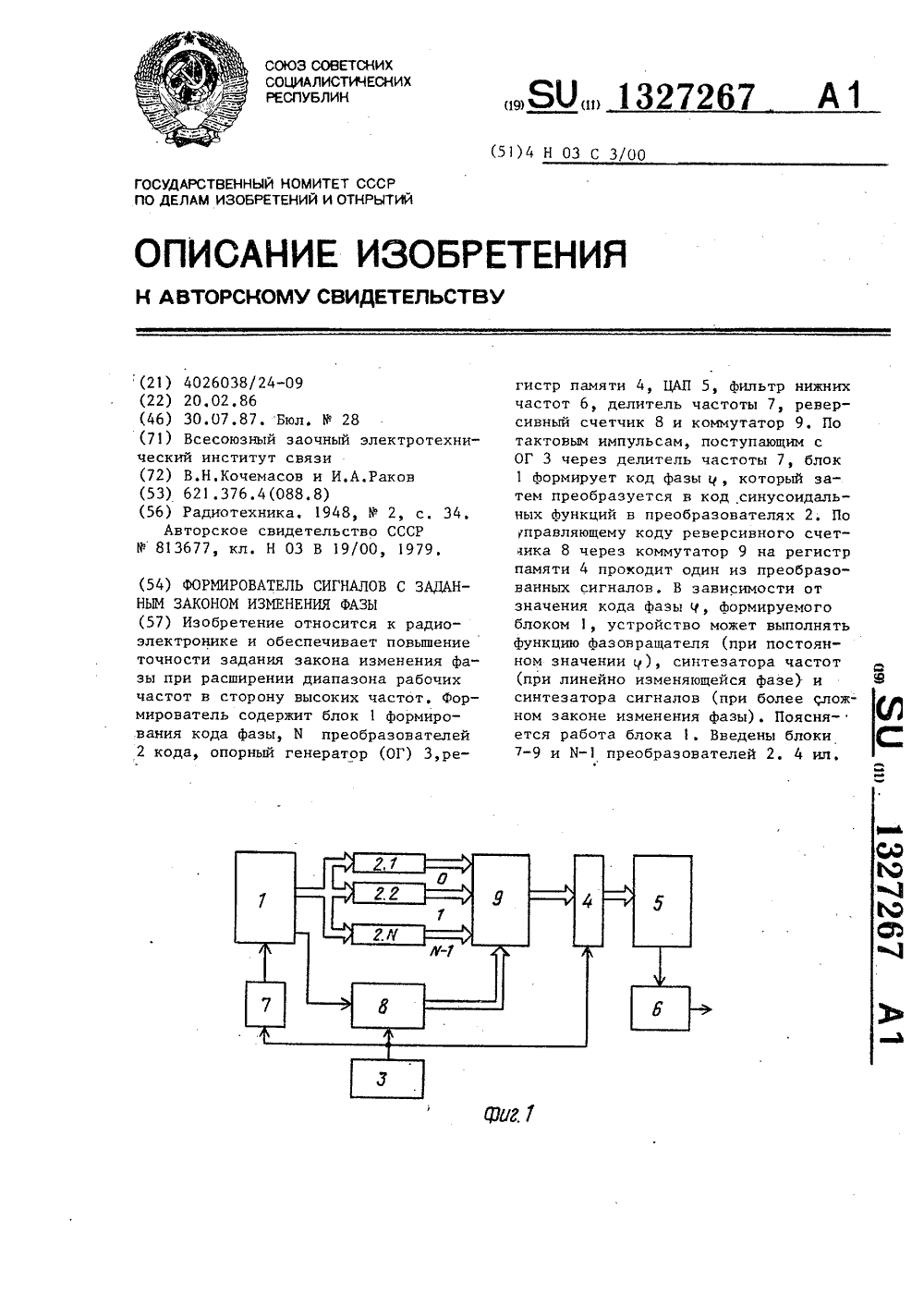
Номер патента: 1327267
Опубликовано: 30.07.1987
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
...с кодом Фазы ц в блоке 1 формирования кода Фазы. Двоичный код числа (т) шоЖ с выхода реверсивного счетчика 8 поступает на управляющий вход коммутатора 9.На выход коммутатора 9 при этом поступает код с М-(ш)шов=го его сигнального входа, Импульс с выхода опорного генератора 3, поступающий на тактовый вход регистра 4 памяти, осуществляет запись в него кода с выхода коммутатора 9, и на выходе ЦАП 5 формируется напряжение, пропорциональное записанному коду. ФНЧ6 пропускает на выход устройства первую гармонику сформированного сигнала.Вся разрядная сетка блока 1 формирования кода Фазы и преобразователей кода 2 . 2используется дляреализации отклонения заданного закона изменения фазы от линейного, соответствующего несущей частоте, Приэтом...
Формирователь сигналов с заданным законом изменения фазы
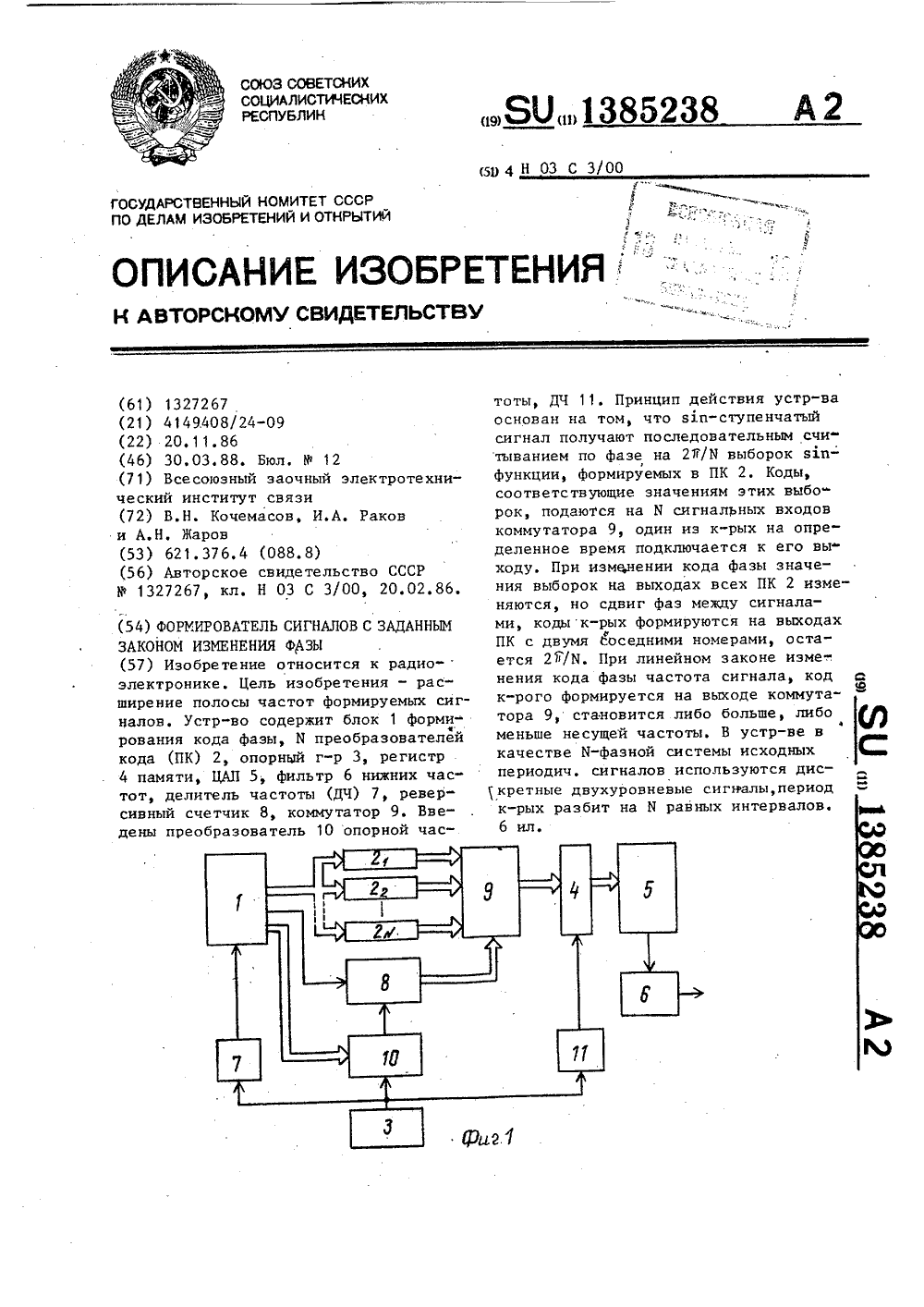
Номер патента: 1385238
Опубликовано: 30.03.1988
Авторы: Жаров, Кочемасов, Раков
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
...разбит на 55И равных интервалов;(тп+п)шойИ - операция суммы помодулю И.В системе сигналов (7) в любоймомент времени отличен от нуля (т.е.равен 1) лишь один из сигналов, чтодает возможность реализовать алгоритм(6), последовательно передавая навыход соответствующие коды И-фаэнойсистемы синусоидальных функций фазы(1) .Предлагаемый формирователь сигналов с заданным законом изменения фазыпозволяет достичь высокой точностивоспроизведения заданного закона из-.менений фазы при одновременном снижении потребляемой мощности и расширении диапазона частот формируемыхсигналов, Это достигается переносомсигнала, сформированного на низкойчастоте, на несущую частоту, что позволяет максимально использовать разрядную сетку блока 1 формирования кода...
Формирователь сигналов с заданным законом изменения фазы

Номер патента: 1385239
Опубликовано: 30.03.1988
Авторы: Жаров, Кочемасов, Раков, Ревун, Соболев
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
...14. С выхода каждого из ннх поступает либо прямой, либо инвертированныи код.В первом квадратурном канале сигнал управления инверсией, поступающийс выхода блока 8, является также старшим разрядом кода сигнала и поступаетна вход старшего разряда регистра 4памяти. То же самое происходит и вовтором квадратурном канале (сигнал свыхода блока 8 поступает на входстаршего разряда регистра 15 памяти.В случае, если число преобразова"телей 2, - 2кодов является степеньюдвойки, т.е. Х = 2, р = 2,3,4,блок 8 упрощается: реверсивный счетчик 28 становится двоичным и можнообъединить функции реверсивных счет-чиков 28 и 29 и делителя 30 частоты,как показано на фиг. Зб. В этом случае реверсивный счетчик 28 имеет емкость 2 , а один из входов...
Предыдущий патент: Устройство для позиционного управленияманипуляционным роботом
Следующий патент: Устройство для контроля исправностиоргана управления
Случайный патент: Сбрасыватель длинномерных грузов с рольганга