Способ определения полукруговой девиации
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 778450
Авторы: Гольденберг, Грачева, Джанджгава

Текст
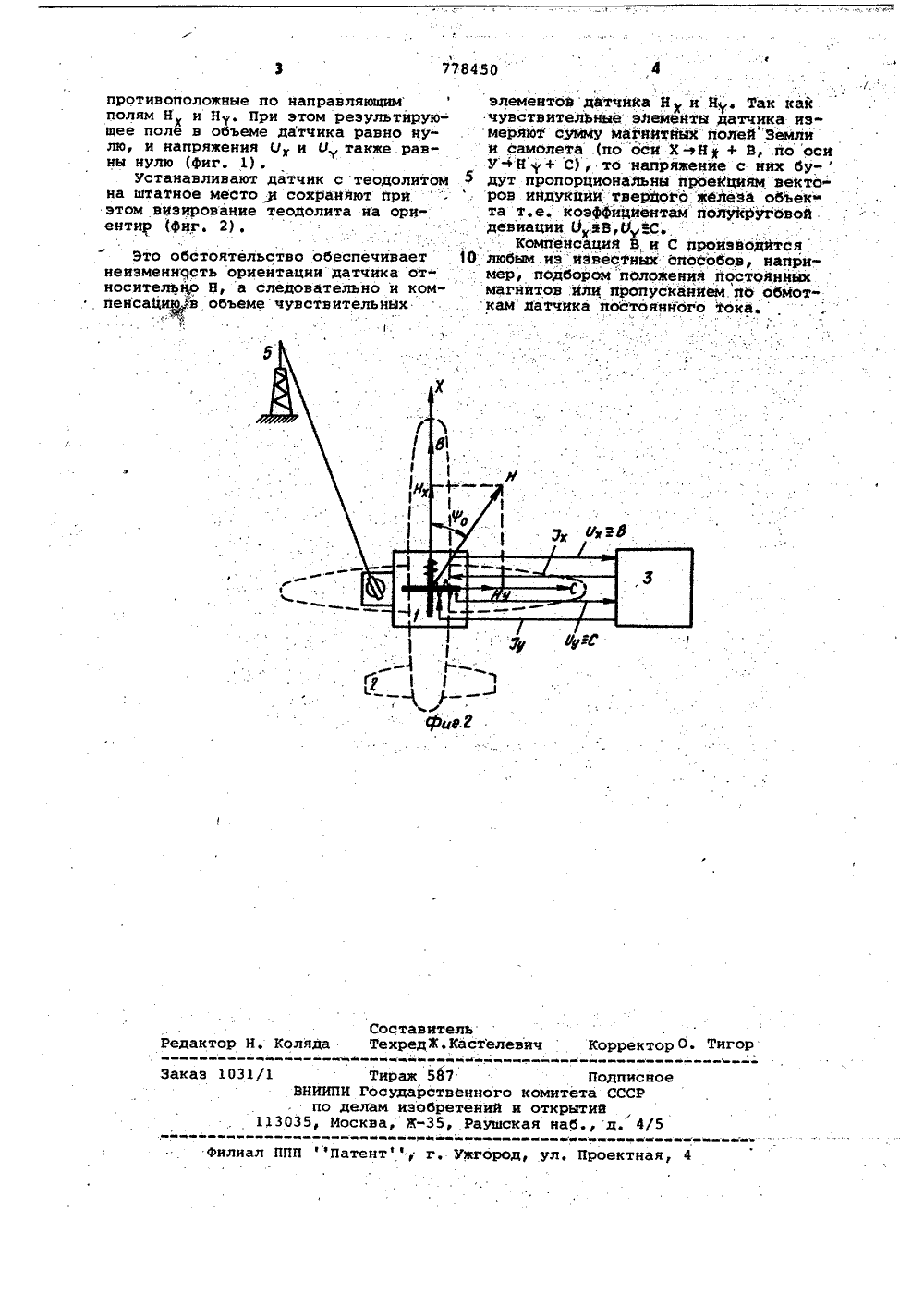
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 9 ЯО и 7 0 А а.а 01 С 17 0 ИСАНИЕ ИЗОБРЕТЕНИЯ ВТОРСНОМУ СВИ ЛЬСТВУ 3ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ.2. Авторское свидетельство СССРР 73773 кл. Н 02 Р 1/50 1946(54)(57) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ, заключающийсяв измерении горизонтальной составляющей магнитного поля Земли на летательном аппарате датчиком магнит-його курса, измерении его азимута и сравнении составляющей с ее эталонным значением для данного пункта, о т л и ч а ю щ и й с я тем, что, с целью определения полукруговой девиации в любом пункте путем исключения расчета эталонного значения горизонтальной составляющей магнитйого поля Земли," эталонные значения горизонтальной составляющей магнитного поля Земли определяют йутем установки датчика магнитного курса на земной поверхйости и ориенти- рования его под тем -же азимутом.ФеИзобретение относится к области любом пункте, путем исключения расНавигационного приборостроения, а , чета эталонного значения горизонтальточнее к методам девиационных работ ной составляющей магнитного поляс авиационнымй" дистанционным магнит- Земли.ними компасами (ДИК), предназначен- . Поставленная цель достигаетсянцм для аэимутальной коррекции кур тем, что в способе определения полу- совым гйроскойов по магнйтному кур- круговой девиации, заключающемся всу и может быть использовано при измерении горизонтальной составляюдевиационйыхработах с морскими ДИК.щей магнитного поля Земли налетаиэвестен способ определения"деВи тельном аппарате датчиком магнитногоациисущйостй которого заключается Ю курса, измерении его азимута и сравв томчто объект устанавливаЮт НанЕнии собтавляющей с ее эталонным8 румбов через "45 ф, определявт на зваченйем для данного пункта, эта.этих румбам с пойФФю зтаююийих лонное "значение горизонтальной соссредств действительиое Значениетавляющей магнйтного поля земли опмагнитного курса объекта фиксйруя Я ределяют йутем установки датчика магодновременно с этим эначейия компас- нитного курса на земной поверхностиного курСа ДИК, вычисляют погрею- . и ориентирования его под тем же аэи"ность ДИК на курсах через 45 е как.мутом.разность между компасным.курсом и. На фиг. 1 и 2 представлены век действительнцмзначением магнитного ) торные диаграммы и блок-схемы, пояскурса объекта, используя приближенное няющие сущнОстЬ спОсоба20преДставление ДевиаЦии В ВийЕ цЯтиНа чертежах Показаны датчик 1первых коэициентов ряда ФуРье, магнитноо курса маятникового типакоторые затем используют для ком- . с двумя взаимно перпендикулярнымипенсации Г 13. чуватвитетьиыми элементами, котоне 4 остатком способа являются 2 рые при установке датчика йа объектболыея.трудоемкость девиациоиных . 2 ориентируются вдолЬ осей Х и Уработ, при которых необхоювсо исполь- объекта соответственао, Э -., иэмеризоэать буксировочные средства, соэ- тельно-компенсационный б 3юли а н тнце помехи, необходи- долйт 4, ориентир 5,. Н - Вектор ино лок теомость строительства специальных до 3 О дукции горизонтальной составляющейрогостоящих немагнитных плацадок ипз- магнитный куФс датчика)или поворотных кругов.- магнитный курс объекта Н ,ННаиболее близким к изобретениюф .секта , ктехническим ревщнием является с, б Р и И на чувствительные элепроекции И на ч чствитеопределения полукруговой денации 35 ж да 6 Ри нтиРованйыв вдольдатчика магнитного курса летат льн - . и .У объекта соответетвенно,осей Х и Уобго аппарата, исключающий необходи- Х У " Кн Задаваемые в обмоткуе Змость поворота последнего.чувствительных элементов датчика дляСущность способа заключается вкомпенсации Нк и Я соответственноумагнитных измерениях и последующей Х у - нпряжейие с смряалЬна обматематической обработке результатов ув вжельнцх злемеитов дат"40 моток ч ствительнцхизмерений, в процессе которых изме-ф ф С ВЕКТоРы Йндукции магчика; В С - векто и кряют величины магнитных полей, дей- нитного полЯ Объектау соответстВУюствующих в объеме чувствнтельйых щие одноименным коэффициентом полу.элементов датчика магнитного курса,круговой девиации.в горизонтальной плоскости по оси у 45 В бе определение полукругои по оси Х, затем, испожзуя эталон- вой девиации пронзводится с учетомное значение величины го изо - тг что четВЕРтиаЯ девиацйя, Вцйой составлнющей магнитного полЯ забл"Ы ,жОго железа УЗемли (ИПЗ) в месте выполнения е- заблаговременно устраиена, нлй дОси девиационных работ прн угловом положе" " нии датчикаотносительно горизонтальСпособ заключается 3 сл емС бает 3 следующем.ной соста ляющей МПЗ Рассчитыа устанавлиВают датчик 1 на курс. коэффициенты полукруговой девиации. ,т ч остью +5 курсу ббъПРИ ЭТОМ имеется в виду, что Чет- ехта ЮВнзируЮТ Теодолит 4 навертная девиация вызываемая - 55 выбранный ориенте 5 И соединяютем мягкогофф железа заблаго е - датчнк и ТеОдолит (фиг. 1)влияни- жестконо устРанена или достаточна мала 2, , Р Цй ДатЧЙКа В вцбранном на"вр мен- О Мента ямалаправлении с" тбциосТью-+5 обеспечинедостатком способа являтся дос- вает точйосТь"иэмеренйй В и С нетаточно большой объем вычислитель- ниже 0,5.нцх операций и необходимость нали. " .Йодключаютдатчик 1 к иэмерительчия эталонного значения горизонталь- йокомйейсационйому блоку 3, от койой составляющей магнитного поля -тоРбго в сигнальные обмбтчувствительньй элементов задают то/Целью изобретения является опре: ".ки 9 и Ж которые со дделение полукруговой девиации В65 нце поля, РаВные по величинам иг.г СоставительТехред Ж. Ка стелевич орректор О, Тнгор Коляд Редакт 1 Тираж 587ВНИИПИ Государственногопо делам изобретений и113035, Москва, Ж, РаушскейЕ юилнал пПП фпатент 1 ф, г. Ужгород аказ 1031/ Подписноитета СССРкрытыйнаб., д. 4/5 ом Проектная, 4 противоположные по направляющим полям Н и Н, При этом результируюХщее поле в объеме датчика равно нулю, и напряжения и и и, также равны нулю (фиг. 1).устанавливают датчик с теодолитом на штатное место и сохраняют при. этом визирование теодолита на ориентир (фиг. 2). Это обстоятельство обеспечивает неизменность ориентации датчика от носительйо н, а следовательно и компенсаЦХв объемечувствительных4/.элементовдатчика Н и Й. Так какчувствителЬные элементы датчика измеряют сему магнйтййх полей Землии самолета (по оси Х-фН + В, по осиУ-Н + С), то напряжение с нйх бу-5 дут пропорциональны проекциям векто"ров индукции твер 4 оГо желеъа объек"та т.е, коэффициентам полукРуговойдевиации О,вв,ИВС.Компенсация В и С производится10.любым.иэизвестных способов, например, подбором положения йостоянныхмагнитов .Или пропусканием по обмоткам датчика побтоянйого Фока.
СмотретьЗаявка
2732762, 05.03.1979
ПРЕДПРИЯТИЕ ПЯ М-5613
ГОЛЬДЕНБЕРГ Ф. М, ГРАЧЕВА Н. С, ДЖАНДЖГАВА Г. И
МПК / Метки
МПК: G01C 17/00
Метки: девиации, полукруговой
Опубликовано: 15.01.1984
Код ссылки
<a href="https://patents.su/3-778450-sposob-opredeleniya-polukrugovojj-deviacii.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения полукруговой девиации</a>
Устройство для определения относительной величины вертикальной и горизонтальной составляющих напряжённости электромагнитного поля

Номер патента: 60975
Опубликовано: 01.01.1942
Автор: Матевицкий
МПК: G01R 29/08
Метки: величины, вертикальной, горизонтальной, напряжённости, относительной, поля, составляющих, электромагнитного
...прибора приемникаЕ=. А.,;Л 60975Связь между первым и вторым способами выражается следующимсбразом:Есова А,еАд Ез 1 п 2 4 зВ, =-:": -Ев АйВторой способ имеет очевидные преимущества перед первым в смысле простоты отсчета: вместо измерения величин А А, и Аз достаточно по прибору отметить положения минимума (угол О, или 6), Од. нако в случае, когда горизонтальная и вертикальная составляющие имеют значительный сдвиг фаз, минимум может оказаться весьма неотчетливым и отсчет будет неточным. Тогда первый способ явится более надежным.При устойчивом или медленно изменяющемся поле измерение можно производить при повороте ротора гониометра от руки. При быстро следующих друг за другом замерениях и поворотах плоскости поляризации необходим уже...
Устройство для измерения горизонтальной составляющей магнитного поля земли

Номер патента: 278140
Опубликовано: 01.01.1970
МПК: G01V 3/165
Метки: горизонтальной, земли, магнитного, поля, составляющей
...1 пОзф 3 = 1.0 з 1 пфзтпй 1,где т, О - углы тоннажа и крен ственно, 1 и Й - время и угловая пряжения системы автокомпенсац Уз - переменные напряжения, по на выпрямители 5, б, 7 каждой п Гельмгольца.Данные углов поступают на тра ры от гировертикали 4. Для компе тик альной составляющей магнит Земли кольца Гельмгольца требуе278140 Подписное открытий 19 Тираж 480Комитета по делам изобрпри Совете Министровосква, Ж, Раушская на Заказ 3251 ЦНИИПИ тени ССР б.,ография, пр, Сапунова,3вать постоянным напряжением, поэтому сигналы с трансформаторов 3 выпрямляются выпрямителями 5, б, 7. Суммарное (вспомогательное) поле кол ц Гельмгольца устанавливается вертикально, независимо от ориентации платформы.Основное назначение системы автокомпенсации -...
Способ измерения горизонтальной составляющей вектора геомагнитного поля н-магнитометром фанзелау

Номер патента: 905889
Опубликовано: 15.02.1982
Авторы: Александров, Гринкевич
МПК: G01R 33/02
Метки: вектора, геомагнитного, горизонтальной, н-магнитометром, поля, составляющей, фанзелау
...при обратной ориентировке по азимуту: для этого прибор поворачивают на 180 и нить закручивают на такой угол О чтобы на отсчетной шкале появилсяФормула изобретения 20 тот же отсчет = О. Записывают второепоказание ь , пои С вычисляютТн:где А - постоянная прибора, еевеличина известна.П р и м е р. На Фиг. 1 показанысилы, действующие в плоскости кача,ния магнитной системы прибора (МСП)в первой ориентировке. Плоскостькачания предполагается вертикальнойи совпадающей с плоскостью магнитного меридиана, т. е. с направлениемН. Линией С - Ю показано положениемагнитной оси МСП в момейт взятияотсчета . Стрелками показаны направления действия сил, Р - силатяжести, приложенная к центру тяжести МСПЧерез щЕ 4 щН силы, обусловленные действием на МСП...
Устройство для измерения курса подземного объекта

Номер патента: 446637
Опубликовано: 15.10.1974
Авторы: Божко, Орлов, Савкин, Сбоев
МПК: E21B 47/024
Метки: курса, объекта, подземного
...на па.раллельно включенные статоры двух сель цов приемников 5 и 6. Результирующие магнитные потехи сгатороп сельсшов.при "мнцкп 0 Ф/5 и Ф/6 имеют одно направление, определяемое распределением токов в сцгнальиых об.мотках 3 индукционного треугольника.С ротора 8 напряжение подают на вход уси.лителя 1 следящей системы, исполнитель.5 цый двигатель которой через редуктор 9 пово.рачнвает ротор 8 в согласованное положение, . соответствующее углу 90. Так как роторы за.креплены ца одной оси со сдвигом на 90, то сгрелочцый индикатор характеризует цаправ.ление проекции Нт, а индикатор 12 ротора 7446 В 37 Ну = Н.+Н.,авитель И. КарбачинекаяТехред М. Семенов Корректор О. Тюрин дактор Н Твраж 618Совета Минастрок ОСоткрытийаи иаб., д. 4/5 Из,д.1639...
Магнитный датчик электрических импульсов

Номер патента: 1742502
Опубликовано: 23.06.1992
Авторы: Николаев, Пешель, Погожев, Смыслов
Метки: датчик, импульсов, магнитный, электрических
...шунтами по перифериии в виде лопастей.На фиг,1 изображен датчик, поперечный разрез; на фиг,2 - сечение А - А на фиг,1,В корпусе 1 из немагнитного, преимущественно диэлектрического материала закреплена замыкаемая магнитная цепь в виде плоского круглого кольца, включающего рабочие элементы: магнитный источник, преимущественно магнит 2, воздушные зазоры 3 Зв - условно, верхний, Зн - нижний зазор), магниточувствительный элемент 4, например элемент Холла. и соединяющий их магнитопровод, состоящий из нескольких участков (5 а, 56, 5 в и 5 г). Элемент Холла 4 закреплен в магнитном зазоре между участками магнитопровода 5 б и 5 в и защищен от действия окружающей среды, например залит полимером. Узлы обозначены набором цифр (с запятыми),...
Предыдущий патент: Способ дифференциации вирулентных и вакцинных штаммов вируса гриппа
Следующий патент: Способ получения водорода
Случайный патент: Способ регулирования питания котельной установки