Следящая система микроперемещений
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
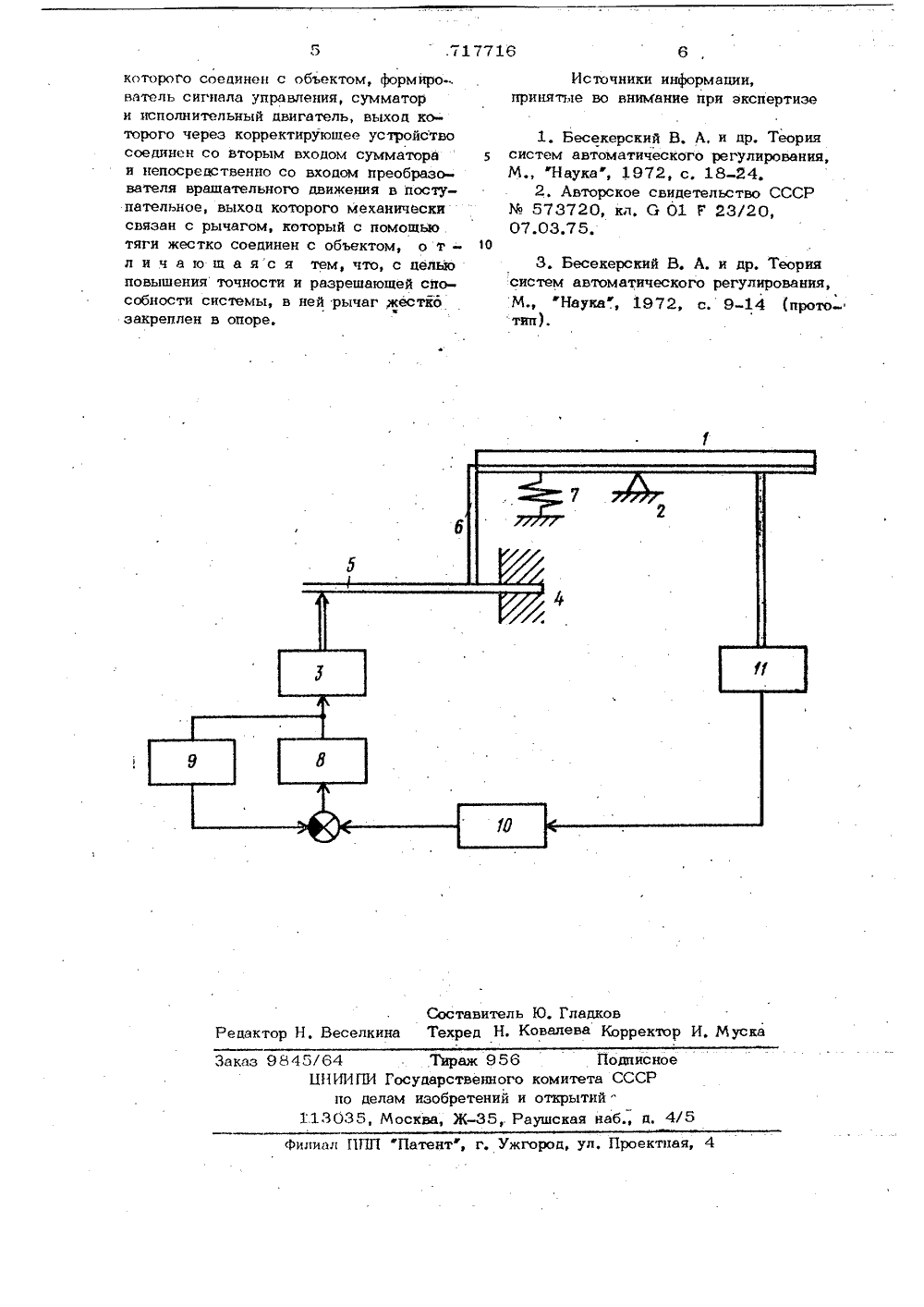
О П И С А Н И Е717716ИЗОЗРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихреспублик,с присоединением заявки,Геаударстевииый комитет СССР по делам иэобретеиий и еткрмтий(54) СЛБДЖЦАЯ СИСТЕМА МИКРОПЕРЕМЕЩЕНИЙ 1Предлагаемое изобретение относитсяк области управления оптическими объек тами (в частности, зеркалами различ.ных имитаторов и измерительных йриборов при их юстировке) или друрими устройствами автоматики, в которых требу 5 ется обеспечить высокую разрешавщую - . способность по угловому или лттйейному перемещений объекта рМуМЙрованияО Известны следящие системы,- содержащие измеритель сигнала. ошибки, блок формирования сигнала управления, исполнительный механизм, охваченйый обратной связью, механические передачй иобъект регулирования 11,Механические передачи системы та-, кого вида содержат поппрузиненный рычаг, который с помощью тяг соединен с объектом регулирования и который шар-,. нирно закреплен на опоре 21. 2Пружины в известных механических передачах применяются для компенсации различного рода люфтов.Однако использование для целей микроперемещений в следящей системе традиционных решений неприемлемо по следующей причине. Следящая система микро- перемещений должна иметь большой коэффициент усиления, для того чтобы обеспечить малые линейные перемещения порядка долей микрометра или угловые перемещения порядка долей секунды. Однако при значительном коэффициенте усиления системы врзникают трудности обеспечения устойчивости ее работы. Устойчивость работы системы может быть обеспечена при выполнении определенных требованиях, предъвляемых к механической передаче: а) отсутствие люфтов, б) монотонная зависимость перемещения выходной координаты от входного воздействия в диапазоне малых величин. Обычные передачй, например, с зубчатыми колесами на валу объекта и подцпщз 717716 4никами трения или качения в осях неприемлемы из за неидеальности контактных поверхностей деталей, имеющихвзаимное перемещение;Из известных систем наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая последовательно соединенные блоквыделения сигнала ошибки, вход которого соединен с подпружиненным объектом, формирователь сигнала управления,сумматор и исполнительный двигатель,выход которого через корректирующееустройство соединен со вторым входомсумматора и непосредственно со входомпреобразователя вращательного движенияв поступательное, выход которого механически связан с рычагом; который спомощью тяги жестко соединен с объектом 31, . 20Недостатком известной системы являются ее низкие разрешающая способ ность и точность из за наличия люфтовв шарнирных опорах механической передачи,Целью настоящего изобретения является повышение точности и разрешающей способности системы.Поставленная цель достигается тем,что в системе рычаг жестко закрепленв опоре,Блок-схема системы представленана" чергеже,Система содержит объект регулирования - 1 безлюфтовую опору - 2,преобразователь вращательного двйженияв поступательное - 3, опору - 4, рычаг 5, тягу - 6, пружину - 7, исполнительный двигатель - 8, корректирующееустройство - 9, формирователь сигналауправления - 10, блок выделения сигнала ошибки - 11,Следящая система микроперемешений,блок-схемакоторой приведена на чертеже, обеспечивает запоминание выходнойкоординаты при снятии питания благодаряналичию интегрирующего элемента (исполнительного двигателя 8), фиксирующего положение выходного вала,Принцип действия системы состоит вследующем.Объект регулирования 1, закрепленныйв безлюфтовой опоре 2, имеет возможность углового перемещения относительно последней, Давление объекта 1 осуществляется через упругомеханическуюпередачу, которая выполнена в виде гибкого рычага 5, Последний обеспечивает редукцию больших перемещенийпреобразователя 3 вращательного движения в поступательное в малые перемещения тяги 6. Рычаг 5 жестко укреплен в опоре 4, что обеспечивает отсутствие люфта и монотонность перецачирычага 5, Рычагс помощью тяги 6перемещает объект 1. Люфты креплениятяги 6 выбираются пружиной 7, Преобразователь 3 вращательного движения в в поступательное преобразует вращение исполнительного двигателя 8 в поступателыое движение конца рычага 5.15 Корректирующее устройство 9 и формирователь сигнала управления 1 О обеспечивают необходимую точность и устойчивость системы, Отрицательная обратная связь по положению, вырабатываемая блоком выделения ошибки 11, выделяет сигнал рассогласования объекта, Блоквыделения ошибки 11 имеет высокуюразрешающую способность и может бытьпостроен, в частности, на оптическомпринципе.Таким образом, в следящей системеиспользовано сочетание обычных элементов следящих систем со специальнойупруго-механической передачей, обеспеичивающеи основные особенности предлагаемого технического решения:а) отсутствие люфтов в элементахзакрепления объекта;б) наличие редукции больших переме щении исполнительного двигателя 8чс помощью упруго-механической передачи, коэффициент редукции определяетсясоотношением плеч рычага 5;в) применение упруго-механической40передачи обеспечивает строгое соответствие между большими перемещениямипреобразователя 3 вращательного движения в поступательное и малыми перемещениями тяги 6 и, следовательно, 45 объекта регулирования 1, т,е. обеспечивает высокую разрешающую способность.по перемещению.Положительный эффект системы состоит в обеспечении в любой разрешающей50 способности по перемещениям следящего привода, фиксации выходной координаты при снятии питания или управляющего сигнала и использовании материалов без специальных физических свойств, 55Формула изобретенияСледящая система микроперемешений,содержащая последовательно соединеннькблок выделения сигнала ошибки, вход.717716 Составитель Ю. ГладковВеселкина Техред Н, Ковалева Корректор И, Муска дах тор Тираж 956 Подцисосударственного комитета СССРм изобретений и открытий"осква, Ж, Раушская наб., д аказ 9845/64 ЦНИ.13035, М иал ППП фПатентф, г. Ужгород, ул, Проектная,которого соединен с объектом, формиро-.ватель сигнала управления, сумматори исполнительный двигатель, выход которого через корректирующее устройствосоединен со вторым входом сумматораи непосредственно со входом преобразователя вращательного движения в поступательное, выход которого механическисвязан с рычагом, который с помощьютяги жестко соединен с объектом, о т -л и ч а ю ш а я с я тем, что, с цельюповышения точности и разрешающей способности системы, в ней рычаг, жесткозакреплен в опоре. Источники информации,принятые во внимание при экспертизе1. Весекерский В. А, и др, Теориясистем автоматического регулирования,МфНаука", 1972, с, 18-24,2. Авторское свидетельство СССР
СмотретьЗаявка
2405640, 09.09.1976
ПРЕДПРИЯТИЕ ПЯ В-8670
ДРОЕНКОВ ВАСИЛИЙ ФЕДОРОВИЧ, ЛЫСЕНКО ЛАУРА СЕРГЕЕВНА, ПАХОМОВ ВИКТОР ПЕТРОВИЧ, СОКОЛОВА НИНА НИКОЛАЕВНА, ТАРАСОВ ГЕННАДИЙ ПЕТРОВИЧ, ЧЕМОДАНОВ БОРИС КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: микроперемещений, следящая
Опубликовано: 25.02.1980
Код ссылки
<a href="https://patents.su/3-717716-sledyashhaya-sistema-mikroperemeshhenijj.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система микроперемещений</a>
Система передачи информации с адаптивной дифференциальной импульсно-кодовой модуляцией с компрессией сигнала ошибки предсказания

Номер патента: 1107308
Опубликовано: 07.08.1984
Авторы: Гнетнев, Маримонт, Новиков
МПК: H04J 13/02
Метки: адаптивной, дифференциальной, импульсно-кодовой, информации, компрессией, модуляцией, ошибки, передачи, предсказания, сигнала
...второй фильтр нижних частот, компрессор частоты дискретизации, адаптивный дельта-модулятор и мультиплексер, второй вход которого через кодер сигнала ошибки предсказания соединен с вторым выходом фильтра-анализатора, а на приемной стороне последовательно соединенные демультиплексер, адаптивный дельта-демодулятор, Фильтр нижних частот, экспандер частоты дискретизации, выравниватель спектра, фильтр-синтезатор и цифроаналоговый преобразователь, причем второй выход демультиплексера через декодер сигнала ошибки предсказания соединен с вторым входом фильтра- синтезатора, на передающей стороне введены блок постоянной памяти и последовательно соединенные блок вычисления величины искажения, блок управления и кодер индекса, выход которого соединен...
Устройство для дифференцирования сигнала ошибки в замкнутых одноконтурных системах автоматического регулирования (сар) с пропорциональнодифференциальным законом управления

Номер патента: 503254
Опубликовано: 15.02.1976
Авторы: Еремеев, Самохвалов, Чернова
МПК: G06G 7/18
Метки: дифференцирования, законом, замкнутых, одноконтурных, ошибки, пропорциональнодифференциальным, сар, сигнала, системах
...- Д "+Лх - продифференцированное а раздифференциальное уравнение объекта регулирования 4 совместно с измерительным блоком 5,где А А;, В Сс , 1,0, Р - постоянныекоэффициенты;Д - оператор вида д/й;Лх, ЛУ, Лп, ЛУ - малые отклонения соответствейно на выходах элемента сравнения,измерительного, исполнительного и управляющего устройств;и, и, К т - пределы дифференцирования.При появлении сигналов Лх и Лх соответ.ственно на выходах элемента сравнения 1 идифференцирующего элемента6 логическийэлемент 7 отключает входы запоминающихэлементов 8, в результате чего с последнихинформация о начальном состоянии САР, соответствующим моменту появления рассогласования Лх, поступает на сумматоры 9, которые, сравнивая ее с текущими значениями параметров...
Датчик сигнала ошибки

Номер патента: 1210201
Опубликовано: 07.02.1986
Автор: Кочемасов
МПК: H03C 3/02, H03D 13/00
Метки: датчик, ошибки, сигнала
...К и Кр в зависимости от К известен, становится возможным обеспечить переход от (3) к (4), Это осуществляется в блоке 8, в котором производится компенсация шумов дроб 1 О 15 20 25 30 35 40 45 50 55 Когда на выходе делителя 2 частоты присутствует низкий уровень напряжения, на выходе первого счетчика 5 Формируется код начальной частоты К , определяющий начальный коэффициент деления ДПКД 4. При этом из блока 3 памяти по нулевому адресу извлекаются нулевые управляющие сигналы, которые поступают на управляющий вход блока 7 исключения импульсов и блока 8 компенсации шумов дробности. Когда уровень напряжения на.выходе делителя 2 частоты изменяется, первый и второй счетчики 5 .и 6 переходят в счетный режим, причем второй счетчик 6 по импульсам с...
Устройство для имитации цифрового сигнала ошибки следящего привода

Номер патента: 1472870
Опубликовано: 15.04.1989
Авторы: Краев, Крутелев, Лопырев, Новиков, Помылев, Соловьев
МПК: G05B 11/00
Метки: имитации, ошибки, привода, сигнала, следящего, цифрового
...контакты ключа 23 на инвертирующий вход операционного усилителя24 с запоминающим элементом (конденсатором) 25 и резистором 26 обратнойсвязи.С выхода операционного усилителяэто напряжение (в виде управляющего напряжения постоянного тока) поступа 10 15 20 25 30 35 40 45 50 55 ет на выход блока памяти и гоответственно на вхоц следящего привода 6,привоця его в пвижеш.е, Это движениенаправлено в сторону уменьшения угларассогласования, что вызывает уменьшение сдвига фаз выходного напряжения фазовращателя 3 относительно его напряжения питания, и в динамикена выходе дифференциала 2 все времяпроисходит вычитание движения привода из движения аналогового программного механизма, а разность вызывает поворот ротора фазовращателя на...
Устройство для измерения сигнала ошибки

Номер патента: 458767
Опубликовано: 30.01.1975
Автор: Коган
МПК: G01N 13/02
...5 шпбкц,лючецчльс, ровня, пульсди ценИзобретение относится к измерительной технике, а именно к устройствам для измерения сигнала ошибки.Известно устройство для измерения сигнала ошибки, содержащее счетчик импульсов, подключенный к выходу генератора тактовых импульсов, счетчики числа превышений заданного уровня, один из которых соединен с выходом импульсного компаратора напряжений, подсоединенного к источнику заданного уровня, и формирователь сигнала ошибки, воспроизведенного с магнитной ленты, Однако такое устройство вносит значительную погрешность в процессе измерения сигнала ошибки.Цель изобретения - уменьшение погрешности измерения,Для этого предлагаемое устройство снабжено блоком импульсного квантования по уровню, входы...
Предыдущий патент: Устройство для измерения временных интервалов в непериодических последовательностях импульсов
Следующий патент: Система управления с упругой механической связью
Случайный патент: Способ сооружения противофильтрационного экрана в гидротехнических сооружениях из грунтовых материалов