Способ определения скорости движения и угла сноса изображения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
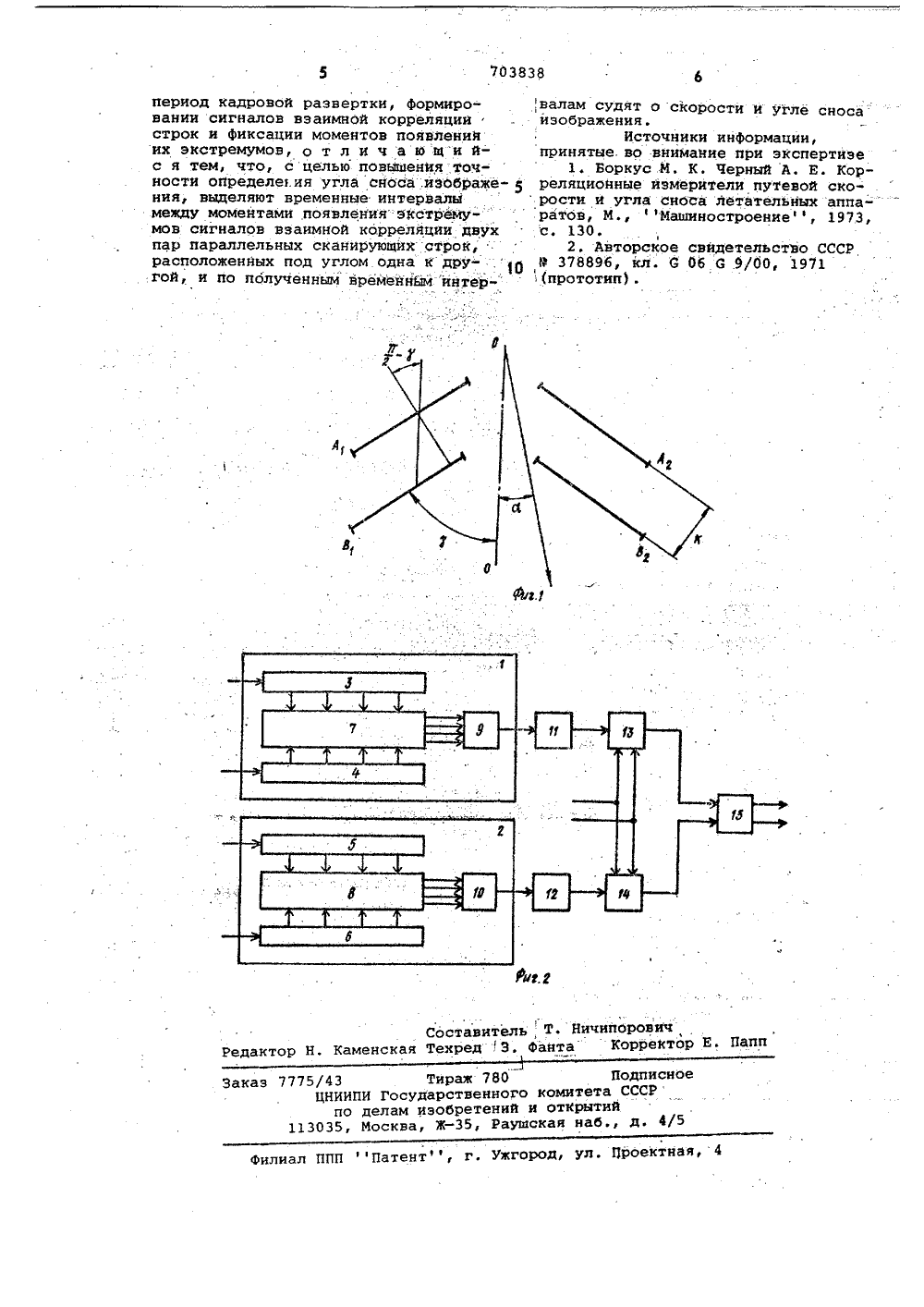
(5 ЦМ, Кл,2. 6 06 6 9/00 с присоединением заявки М -Государствеивый коиите СССР по ямам кзобретевнв и открытка(71) 36 ЯВИТЕЛЬ Куйбышевский политехнический институт им. В. В. Куйбышева-.ЪМФ-ФФЫ Ъ- Фь -.-.г мм.:045 М(54) СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И УГЛА СНОСА ИЗОБРАЖЕНИЯ Однако такой способ имеет низкую точность определения параметров движения иэображения. Изобретение относится к областиавтоматики и вычислительной техникии может быть использовано при создании автономных систем навигации летательных аппаратов, движущихся вверхних слоях атмосферы относительноподстилающей поверхности земли,Известны способы определенияпараметров движения изображения подстилающей поверхности 1, основанные накорреляционных измерениях,Эти способы имеют низкую точностьопределения углов сноса при перемещении изображения.Наиболее близким по техническойущности к данному изобретению явЛяется способ определения скоростидвижения и угла сноса изображения сослучайным распределением яркостей,основанный на сканировании изображения строками, сдвинутыми во временина период кадровой развертки, формирования сигналов взаимной корреляциистрок и фиксации моментов появленияих экстремумов 21 . Цель изобретения - повышение точ,ности определения угла сноса изобра"жения,"5Укаэанная цель достигается впредлагаемом способе тем, что выделяют временные интервалы между моментами появления экстремумов сигналов взаимной корреляции двух пар параллельных сканирующих строк, распо-ложенных под углом одна к другой,и по полученйым временным интерваламсудят о скорости и угле сноса иэображенияНа фиг. 1 изображена картина ска нированиядвижущегося изображения нана фиг. 2 - блок-схема устройства,реализующего предлагаемый способ.Набегающее изображение сканируется симметричными (относительно оси 2 О ОО), расположенными одна к другойпод углом 2(или соответственно подуглом 1 к оси симметрии ОО) двумяпарами строк. Строки каждой пары АВ 25.и АВ параллельны и разнесены накадровое расстояние К. Корреляторы1 и 2 выполнены соответственно нарегистрах 3, 4 и 5, б, пораэрядных "-"схемах перемножения 7 и 8 (для перемножения соответствукаих разрядов р703838 3гистров) и сумматорах 9 и 10 выходных сигналов схем перемножения 7 и 8.Указатели 11 и 12 экст е ма в аю(;Ъ. бр йу а ыдают где Ч - скорость движенйя изображения,сигналыпри появлении экстремумов Если направления вирр яцйонных Функций . Мо- жения не совпадают с осью симметриименты появлений экст естремумов относи 00, осуществляется автоматическоетельно начала отсчета - кадровые ин-, центрирование реализаций при записитервалы задержек - определяют ско- " реализаций соответственно, в сдвигорость и угол сносапри"йермещ енинвые регистрй 4 и б. при этом найденныеиэображения. Блок; 13 и 14 вйделявт "-,: кадровые интервалы задержек неравны имоменты появления экстремумов, кото-(О описываются выражениямирые преобразуются выЧйслитеЛьнцмК6 Локом 15 В вйхоДнце ситНалыв эттюДанная картина сканирования и алК-строк йбоэволяет повыситьточность из- ГДЕ С( - УГОЛ СНОСа ИЭОбРажЕНИЯ.мерени, .Улов сноса при перемещении 5 По значениям кадровых интерваловИзображения. Фиксирбвание измеритель" задэржек вычисляют величины скоростиной базы накло н строками прии угла сноса по формулам, вытекающимодномтомЖе угле сноса увеличива- из выражения (1)ет в соэ перемещение иэображения . м,,в стРочном направленни,"нттро" эивива о01 т +тлейтно увеличению эффективной; ,разрешающей" способности, определяю- Ц. Я.С(а Т +Тщей точйость измерения. Для йолучениясоэА гданных о скорости и Угле снябса изоб.: ",:. ,К" ражения, в предлагаемом способе не "21 вуобходимо измерять только каковые.,. Для малых Углов сноса, которые пракинтервалы задержек экстре 4 мов вз - " тически всегда имеютместо в реаль" имных корреляционных функцийодвухньх услозиях, с достаточной степеньюпар строк Что снижает требования к - точности можно считатть созе;Су:,(.РазРешающей способности и вттедтэет .к по-,В этом случае вычисления веду.сявычленив точности. :,,- .- по упрощенным Формулам, следуемым иэСигнэалы сканирования строк АйбАэ" выражения (2)"ситнхронйо записйвают соответственно:,- -. Т +Тв регистры э и б,гие они нравятся "т"1 тт .тна цикле измерения (кадровый период).Сигналы,сканирования строк В 4 и Всинхронно записывают соответсттвенйов регистры 4 и б причемвсякаят по-;СЛЕдуЮщая СтрОКа ВЫтапоКненагарЕант тПбрЕтдЫ-: ТаКИМ ОбраЗОМКаГ(рОВЫЕ ИНтЕрВаЛЫдущую. В сумматорах 9 и 10 суммируют Ф задержки определяют моменты появлениярезультаты"поразрядного перемножения эзкстрэейммов взаимных корреляционныхзначений одйои яеннытх разрядовсост- " функций в кадровых периодахв блокахвсеттствую"щяихт пар регистров - 3, 4 и 5, . 13 и 14, управляемых тактовой:и кадроб. ТаКИМ ОбраЗОМ НаХОдят дВЕВЕтЛИЧИ" птВОй ПОэСЛЕрдОВатЕЛЬНОСтЬЮ ИМПУЛЬСОВ.НЫ, ПрсйОрцИОНаЛЬНЫЕВзатВМйЫрМс КОр э СКОрОСтЬ-дВИжЕНИя И УГОЛ СНОСа ИЗОбрареляционным функциям реалиэзаций раэ- -:. "жения" ъычтистлйют по найденным 1 значениям" ложений строк АВ,; и А В . Указатели : :в блоке вйчисления 15.моментов времени йоявленйяэкстрему-",. " Йспорлъзование йредйаэгаелмого спосо мыов выдают импульсы в Моменты време- ба ойределрбнйя параметроВ движениянипоявления экстремумов . Блоки 13 и5 О иэображейия со случайным распределе 14 выделяют моменты появления экстре, : нием ярыко отей обеспечивает по сравнемумов ортносйтельно начала" огсчета,йко сясужщеаствупющими способами повыше-,определяя тем самым кадровые интерват" ние. точности измерения углов сноса:.движущегося изображения, что особеннолы задержки Т55 важно для современных автономных наПри движении изображения по нап-вигаЦионных систем летательных аппа раВЛЕНйЮ ОСгн СИМмМЕтрИИт 00, ПОЯВЛЕНИЕ ратОВ,экстремумов взаимных коррелтйцтионныхфункций возможно лишь одновременнои в моменты окончания считывания формула изобретениястрок, то есть в момент отсутствиясдвигов реализаций в сдвиговых регистр определения скорости двирах один относительно другого. При ла сноса изображения, осно. этом кадровые интервалы задержек оди" сканировании изображениянаковы и равны сдвинутыми во времени наГ-я,о,т.-тя % Т 1+та я Способ жения и уг ванный на строками,703838 Составитель, Т, Ничипорович аменская Техред ,З. Фанта КорреКтор Е. Папдак ПодписноеСССРйд, 4/5 аж 780венноетений5, Рауш з 7775/43 Тир ЦНИИПИ Государс по делам изоб 113035, Москва, Жкомите и откры ская на Филиал ППП Патент г. Ужгород, ул. Проектная,l период кадровой развертки, формировании сигналов взаимной корреляциистрок и фиксации моментов появленииих экстремумов, о т л и ч а ю щ и йс я тем, что, с целью повыаення .точности определения угла сйоса".изображе-ния, выделяют временные интервалымежду моментами появления Экстрймумов сигналов взаимной корреляции двухпар параллельных сканирующих строк,расположенных под углом одна к дру"гой, и по полученным временным интер,валам судят о скорости и угле сносаизображения.Источники информации,принятые. во внимание при экспертизе1. Боркус Й, К. Черный А. Е. Корреляционные измерители путевой скорости и угла сноса летательных аппаратов, М., Машиностроение, 1973,с. 130.2. Авторское свидетельство СССРВ 37889 бю кл. 0 Об С .9/00, 1971
СмотретьЗаявка
2479023, 15.04.1977
КУЙБЫШЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
КАРПОВ ЕВГЕНИЙ МАКСИМОВИЧ, НАЗАРОВ НИКОЛАЙ ИВАНОВИЧ, СБРОДОВ ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G06G 9/00
Метки: движения, изображения, скорости, сноса, угла
Опубликовано: 15.12.1979
Код ссылки
<a href="https://patents.su/3-703838-sposob-opredeleniya-skorosti-dvizheniya-i-ugla-snosa-izobrazheniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения скорости движения и угла сноса изображения</a>
Приемная антенная система для корреляционного измерителя скорости и угла сноса летательного аппарата

Номер патента: 1689897
Опубликовано: 07.11.1991
МПК: G01S 13/48
Метки: антенная, аппарата, измерителя, корреляционного, летательного, приемная, скорости, сноса, угла
...и угласноса летательного аппарата, и может бытьиспользовано при разработке антенной системы такого измерителя.Целью изобретения является расширениедиапазона измерения углов сноса летательного аппарата и уменьшение поперечного размера антенной системы, 10На чертеже представлена структурнаясхема приемной антенной системы для корреляционного измерителя скорости и угласноса летательного аппарата.Приемная антенная система содержит 15первую 1, вторую 2 и третью 3 приемныеантенны . Конструкция приемной антеннойсистемы следующая, Третья приемная антенна 3 смещена в поперечном направлении на расстояние Уо относительно линии, 20 . соединяющей центры антенн 1 и 2 и совпадающей с продольной осью летательногоаппарата. Расстояние Хо между...
Устройство для измерения скорости и угла рыскания транспортного средства

Номер патента: 1635143
Опубликовано: 15.03.1991
Авторы: Бачурин, Ещин, Заровский, Пантелеев
МПК: G01P 3/64
Метки: рыскания, скорости, средства, транспортного, угла
...2(3) поступает на два входа соответствующего блока 4 определения временной задержки. В каждом блоке 4 определения временной задержки в корреляторе 5 производится вычисление взаимной корреляционной функции Й по формуле 1В (т) = - ( х 1 (г) х 2 (т т) си, (2)где Т - врегля наблюдения,т, - время задержки сигнала хф) в 1-йрегулируемой линии задержки, управляемой -ым регулятором, при котором величина й достигает своего максимального значения.При этом производится непрерывно 40 подстройка регулятором 6 блока 1 регулирования временной задержки так, что на выходе корреллятора 5 поддерживается максимально возможная для данной пары сигналов величина В; (т).45Для и-го блока 4 определения временной задержки (вследствие выполнения условия (1) для...
Устройство для измерения скорости и угла рыскания транспортного средства

Номер патента: 1714518
Опубликовано: 23.02.1992
Автор: Бачурин
МПК: G01P 3/64
Метки: рыскания, скорости, средства, транспортного, угла
...возможных значенийбазы О".25 Устройство работает следующим образом.С началом измерений производятся замыкание управляемых ключей 11 и сбростриггеров 37 блока 10 в нулевое состояние,30 для чего на их вторые входы с помощьюдвухпозиционного переключателя 18 подается напряжение от источника сигнала начальной установки 19, Затем переключатель18 переводится во второе положение, соот 35 ветствующее замыканию выхода элементаИЛИ 17 с вторым входом ключей 11,При движении транспортного средствав условиях наличия угла рыскания р междунаправлением (скоростью) движения и мер 40 ной базой(вертикально-продольной плоскостью) неоднородность поверхности дорогификсируется сначала гп-м первым датчиком1 (3) и затем соседними к нему первымидатчиками, а через...
Измеритель воздушной скорости и угла скольжения летательного аппарата
Номер патента: 589817
Опубликовано: 30.03.1994
Авторы: Перевощиков, Порунов, Ференец
МПК: G01P 5/00
Метки: аппарата, воздушной, измеритель, летательного, скольжения, скорости, угла
ИЗМЕРИТЕЛЬ ВОЗДУШНОЙ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА , содеpжащий пpиемники динамического напоpа, pадиально установленные на вpащающейся платфоpме, жестко связанной с генеpатоpом опоpного электpического сигнала, подключенным на пеpвый вход усилителя, упpавляемым pегулятоpом амплитуды, фазосдвигающей схемой, подключенной к выходам неупpавляемого и фазочувствительного выпpямителей чеpез усилитель и электpонно-измеpительную схему включения стpуйных анемочувствительных элементов, подключенную также на втоpой вход усилителя, отличающийся тем, что, с целью pасшиpения диапазона измеpения, повышения точности и эксплуатационной надежности, в платфоpме выполнена камеpа с пpиемным отвеpстием условно-статического давления,...
Измеритель скорости и угла скольжения летательного аппарата
Номер патента: 801712
Опубликовано: 30.03.1994
Авторы: Бельфор, Захарова, Минькашева, Порунов
МПК: G01P 5/08
Метки: аппарата, измеритель, летательного, скольжения, скорости, угла
ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА , содеpжащий пpиемники динамического напоpа, связанные с пpиемными отвеpстиями условно-статистического давления чеpез пневматические каналы, сообщающие стpуйные пневмочувствительные элементы с пpиемниками динамического напоpа с диффеpенциально включенными стpуйными анемочувствительными элементами теpмоанемометpа, а также усилитель, выпpямители, генеpатоp опоpного сигнала и источник питания, отличающийся тем, что, с целью повышения точности, в него дополнительно введены два электpопневмоклапана, установленные в пневматических каналах, блок памяти, блок фоpмиpования коppектиpующего напpяжения, функциональный генеpатоp импульсов и коммутатоp, пpи этом выход усилителя связан с входом...
Предыдущий патент: Устройство для воспроизведения переменных во времени коэффициентов
Следующий патент: Оптоэлектронное устройство для выполнения математических операций
Случайный патент: Раствор для химического полирования поверхности титана и его сплавов