Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
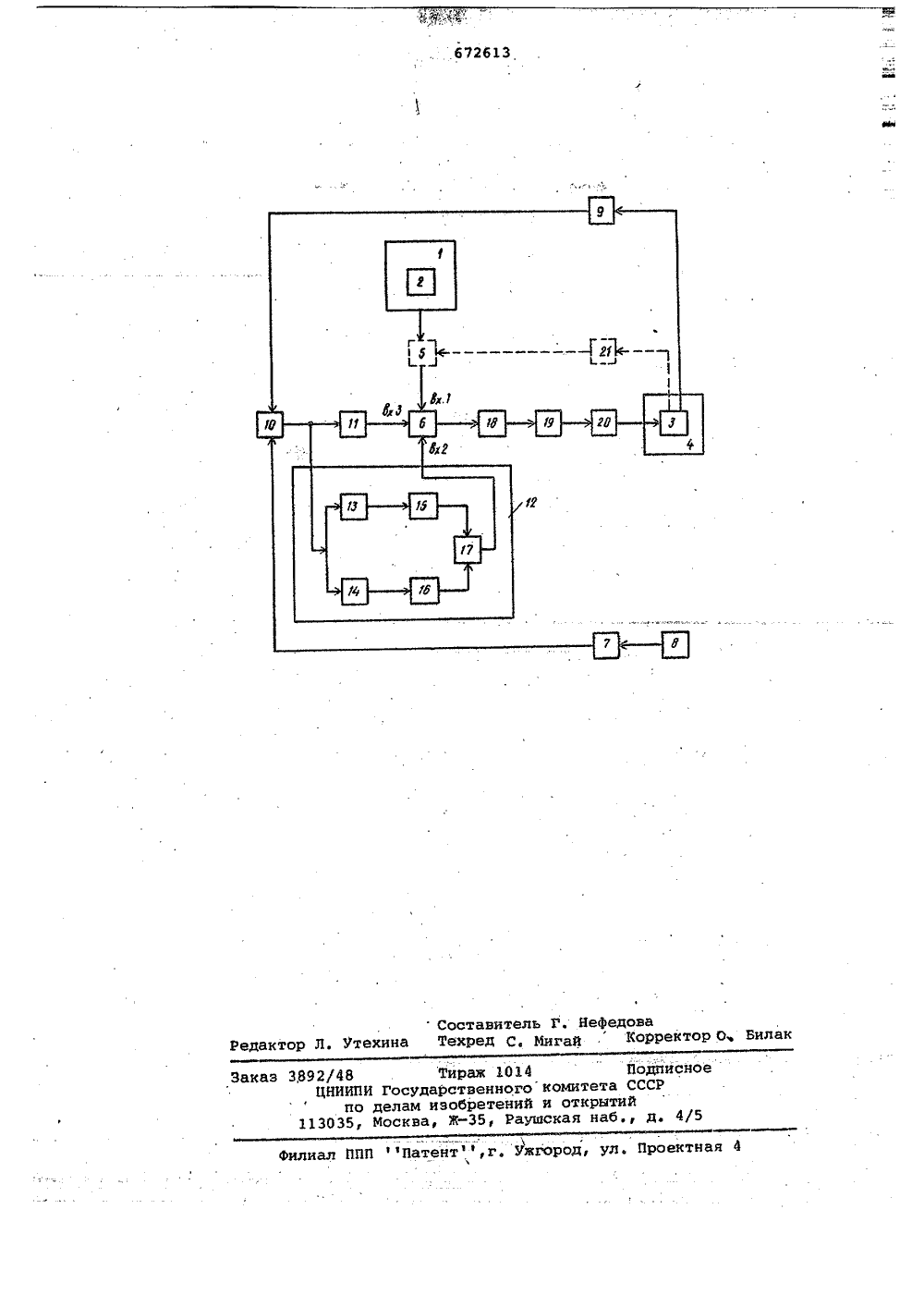
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик(22) Заявлено 271277 (21) 25659 34/18-24с присоединением заявки М Государственный комитет СССР ио делам изобретений и открытий(71) ЗаяВИтЕЛИ Ленинградский ордена Ленина и ордена Трудовотфо КрасйогоиЗнамени государственный университет и НИИ ЛПЭО Электросила) СИСТЕМ АНИПУЛЯТОРОМ РАВЛЕН има вн Изобретение может быть использовано при создании систем управленияпрограммным движением манипуляторов,работающих синхронно с непрерывно движущимся объектом,Известна система. управления манипулятором 1), содержащая блок контроля положения, элемент сравнения,устройство синхронизации, блок памяти и исполнительный механизм, Однакоона не учитывает изменение параметров движения объекта, в результатечего возникает ошибка в поступающемзадающем сигнале, что снижает точйостьработы системы, 1 Наиболее близким техническим решением к изобретению является система(2), содержащая последовательно соединенные задатчик положения, элементсравнения, сумматор, блок коррекции,усилитель мощности и привод, связанный через звено исполнительного органас датчиком положения, выход которогоподключен ко второму входу элементасравнения,Такая система не обеспечивает синхронности движения отдельных звеньевманипулятора относительно непреры одвижущегося объекта и связь управления во всех реж х работы с задающим органом.Целью изобретения является расширение функциональных возможностей системы.С этой целью предложенная, система содержит датчик вращения звена исполнительного органа, последовательно соединенные датчик вращения объекта манипулирования, преобразователь разность частот-напряжение и фильтр низкой частоты и последовательно соединенные первый. управляющий элемент и первый автогенератор и последователь но соединенные второйуправляющийэлемент, второй автогенератор и фазовый детектор, второй вход которого подключен к выходу первого автогенератора, а выход - ко второму входу сумматора, третий вход которого соединен с выходом фильтра низкой частоты, выход датчика вращения звена исполнительного органа подключен ко второму входу преобразователя разность частот-напряжение, выход которого соединен со входом первого и второго управляющих элементов.Структурная схема системы представлена на чертеже, где обозначены пульт управления 1, задатчик положения 2,звено 3 исполнительного органа 4, эле" мент сравнения 5, сумматор б, датчик7 вращения объекта, объект манипулирования 8, датчик 9 вращения звенаисполнительного органа, преобразователь 10 разность частот-напряжение,фильтр низкой частоты 11, дополнитель" 5 ный контур управления 12, содержащийпервый 13 и второй 14 управляющие элементы, первый 15 и второй 16 автогенераторы и фазовый детектор 17, блок коррекции 18, усилитель мощности 19, привод 20 и датчик положения 21,Система управления манипулятором работает следующим образом.Для обеспечения синхронного вра щения объекта и звена 3 исполнитель 10 15 ного органа 4 сигналы датчиков вращения 7 и 9 поступают на преобразователь 10, напряжение на выходе которо"го меняется с частотой, равной разностичастот вращения объекта 8 извена 3, поступает на Фильтр 11 и наконтур управления 12, который обеспечивает астатический режим регулирования. Контур управления 12 полностьюустраняет зависимость фазы (частоты)вращения звена 3 от его расстройки .относительно фазы (частоты) вращенияобъекта 8. Сигнал рассогласования,.поступающий с выхода преобразователя10 через элементы 13 и 14 в противоФазе, управляет частотой автогенера 20 25 30 торов 15 и 16, колебания которых сравниваются в детекторе 17. Выходное напряжение детектора 17 определяетсяразность 1 о фаз напряжений, действующих на его входах. этим завершается интегрирование сигнала рассогласования преобразователя 10, напряжение с выхода детектора 17 через сумматор б, блок коррекции 18 и усилитель мощнос 35 40 ти 19 поступает на вход привода 20 звена 3; Привод 20 отрабатывает входной сигнал рассогласования. При этом звено 3 поворачивается таким образом, чтобы ликвидйровать отклонение по Фазе (частоте) движения (вращенйя) объекта 8.Для расширения рабочей зоны обслуживания манипулятора, установки заданного угла рассогласования между объектом 8 и звеном 3 манипулятора система-содержит задатчик положения 2 напульте управления 1, а между приводом20 и сумматором 6 имеется контур обратной связи по углу через датчик положения 21.В замкнутой системе управления выходное напряжение детектора 17 обеспечивает компенсацию взаимной расстройки движения звена 3 и объекта 8, а выходное напряжение преобразователя 10 компенсацию начальной расстройки генераторов 15 и 16, поэтому в резуль тате расстройки звена 3 относительно опорного сигнала объекта 8 изменяется напряжение только на выходе детектора 17, что эквивалентно введению в систему точного астатизма по Фазе 65 (частоте). Полоса синхронизации (максимально допустимой расстройки) зве" на 3 определяется крутизной характеристики усилителя мощности 19 и максимальным выходным напряжением детектора 17, Прн необходимости оператор поворачивает рукоятку задатчика поло- жения 2 звена 3 на пульте управления 1, Задатчик положения 2 выдает через первый вход сумматора б управляющий сигнал на вход привода 20 звена 3. Привод 20 отрабатывает входной сигнал, При этом звено 3 рассогласовывается относительно вращающегося объекта 8 на заданный угол. Рабочая зона звена 3 смещается относительно вращающегося объекта 8, чем увеличивается (изменяется) зона обслуживания манипулятора.Применение изобретения позволит расширить Функциональные возможности системы управления манипулятором за счет обеспечения синхронного с. заданным рассогласованием перемещения звена исполнительного органа относительно объекта манипулирования.Формула изобретенияСистема управления манипулятоРом, содержащая последовательно соединенные задатчик положения, элемент сравнения, сумматор, блок коррекции, усилитель мощности и привод, связанный Через звеноисполнительного органа с датчиком положения, выход которого подключен ко второму входу элемента сравнения, о т л и ч а ю щ а я с я тем, что, с целью расширения функциональных воэможностей, она содержит датчик вращения звена исполнительного органа, последовательно соединеннйе датчик вращения объекта манипулирования, преобразователь разностьчастот-напряжение и Фильтр низкой частоты, последовательно соединенный первый управляющий элемеит.и первый автогенератор и последовательно сбединенные второй управляющий элемент, второй автогенератор и фазовый детектор; второй вход которого подключен к выходу первого автогенератора, а выход в ко второму входу сумматора, третий вход которого соединен с выходом фильтра низкой частоты, выход датчика вращения звена исполнительного органа подключен ко второму входупреобразователя разность частот-напряжение, выход которого соединен со входом первого и второго управляющих элементов.Источники информации, принятые во вниманиепри экспертизе 1. Патент Японии 49-48206,М.кл. В 25 У 9/00, 1974. 2. Авторское свидетельство СССР Р 499108, кл. В 25 У 9/00, 25.02.74.672 б 13Составитель Г. НеФедоваедактор Л. Утехина Техред С, МигайКорректор 1014 Подписннного комитета СССРтений и открытийРаушская наб., д. 4/ 6 Тираж ИПИ Государстве по делам изобр 5, Москва, ЖЗаказ 38 илиал ППП Патент,г. Ужгород, ул. Проектная 4
СмотретьЗаявка
2565934, 27.12.1977
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМ. А. А. ЖДАНОВА, НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ И ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ЛЕНИНГРАДСКОГО ЭЛЕКТРОМАШИНОСТРОИТЕЛЬНОГО ОБЪЕДИНЕНИЯ "ЭЛЕКТРОСИЛА"
ЗОТОВ ЮРИЙ КОНСТАНТИНОВИЧ, КОЗЯРУК АНАТОЛИЙ ЕВТИХЕЕВИЧ, ЛЕОНОВ ГЕННАДИЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: манипулятором
Опубликовано: 05.07.1979
Код ссылки
<a href="https://patents.su/3-672613-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Датчик высотного положения рабочего органа землеройной машины (его варианты)

Номер патента: 1208151
Опубликовано: 30.01.1986
Авторы: Егоров, Козлов, Магомедов
МПК: E02F 9/20
Метки: варианты, высотного, датчик, его, землеройной, органа, положения, рабочего
...в масло, заливаемое внутрь корпуса 1 ниже уровня подшипников 4,3,7,8,21 и 22,В датчике на фиг, 2 с электромеханическим блоком передачи движения указателю от ведомого звена механизма преобразования корпус, маятник и механизм преобразования угловых перемещений маятника относительно рабочего органа выполнены аналогично датчику на фиг. 1. Указатель 14 положения рабочего органа относительно копирной линии датчика на фиг, 2 выполнен в виде фотоприемника лазерного луча. Блок 19 передачи движения указателю от ведомого звена 11 механизма 9 преобразования помимо оси 20, рычага 23 и груза 24 включает потенциометр 16 и щуп 15, заимствованные от указате ля датчика на фиг. 1, электродвигатель 25 с редуктором 26; закрепленный на.маятнике 5,...
Датчик положения рабочего органа механизма

Номер патента: 1719893
Опубликовано: 15.03.1992
Авторы: Смирнов, Токаржевский
МПК: G01D 5/249
Метки: датчик, механизма, органа, положения, рабочего
...связи (а или в) и генерируетпрямоугольные импульсы только один из генераторов.Скважность импульсов определяет логическое состояние датчика, а наличие импульсов свидетельствует о его исправности.На фиг.2 приведена принципиальная схема датчика положения рабочего органа механизма. Схема состоит из инфракрасного излучателя на светодиоде ЧО 5, приемников инфракрасного излучения на светодиодах ЧО 1 и ЧО 2, усилителей на транзисторах ЧТ 1 и ЧТЗ, частотнозадающих цепочек Яб, Я 7, С 1 и В 8, В 9, В 10, С 2, порогового элемента О 1, усилителя тока на транзисторе ЧТЗ и линии внешней связи для подключения электромагнитного реле или электронного устройства,Работа схемы несколько похожа на работу автогенерирующего мультивибратора на основе...
Устройство для моделирования импульсного датчика частоты вращения

Номер патента: 732914
Опубликовано: 05.05.1980
МПК: G06G 7/48
Метки: вращения, датчика, импульсного, моделирования, частоты
...1 ций вход ключа 17 через диод 13 поступает отрицательное напряжение с выхода нуль-органа 8. Под действием этого напряжения ключ 17 закрывается. Поэтому при положительном сигнале на выходе элемента 6 точка соедицеция резисторов 4 и 5 отключается от обшей точки схемы, входной сигнад О 1 поступает на оба входа интегратора 1, оказывая превалирующее воздействие по инвертируюшему входу, так как ца неинвертируюший вход напряжение Ц В, поступает через управляемый делитель ца резисторах 2 и 3.сВ результате напряжение на выходеинтегратора 1 уменьц 1 ается и в некоторый момент времени 1.1 достигает отрицательного уровня Ц,1, при котором происходит отпрокидывание элемента 6, Элемент 6 переходит в состояние ОтРИ 1 гцатЕЛЬНОГО НаСЫЩЕНИЯ, ЧТО...
Датчик скорости вращения

Номер патента: 964536
Опубликовано: 07.10.1982
МПК: G01P 3/481
Метки: вращения, датчик, скорости
...генератора. 1 импульсов. Выходы логических элементов И 7и 8 связаны с входами раздельнойустановки триггера 11, один иэ выхо"дов .которого является выходом дат- ЗО чика.964536 Формула изобретения2,Датчик работает следующим образом.Выходное напряжение фазовращателя (фиг. 2 а) после формирователя 5поступает на первый одновибратор ив момент перехода через нулевое положение запускает одновибратор б(фиг, 2 в и г) запускаются соответственно положительным и отрицательнымперепадом импульсов генератора 1(фиг, 2 б). В момент времени с -. йимпульс одновибратора 9 (фиг, 2 а)совпадает с импульсом одновибратора б (Фиг. 2 д) и на выходе элемента 7 формируется импульс совпадения(фиг, 2 е), который переводит триггер 11 в единичное состояние (фиг.2...
Датчик высотного положения недоступной точки рабочего органа землеройной машины

Номер патента: 1587148
Опубликовано: 23.08.1990
Авторы: Егоров, Козлов, Файнзильбер
МПК: E02F 9/20
Метки: высотного, датчик, землеройной, недоступной, органа, положения, рабочего, точки
...соединены соответственно с ФП 3 и маятником 7. Независимо от величины и направления поворота РО 1 относительно точки В разность высот ФП 3 и точки В будет постоянной величиной, Вертикальное перемещение ФП 3 относительно лазерного луча будет полно. стью соответствовать вертикальному перемещению точки В относительно лазерноголуча. 1 ил. чаг 12, который связан с рычагом 11 ползуном 13. Для уравновешивания рычагов 11 и 12 служат противовесы 14 и 15, Точки подвеса маятников расположены таким образом, что прямая АВ параллельна прямой АВ.Потенциометры 5 и 9 подключены к сумматору 16, сигнал с выхода которого управляет электроприводом 4. С целью демпфирования колебаний маятников и снижения трения корпус 6 заполнен масДатчик высотного положения...
Предыдущий патент: Сравнивающее устройство
Следующий патент: Устройство для воспроизведения управляющего момента
Случайный патент: Стол для рентгенологических и других медицинских целей