Система для моделирования динамических процессов в системах автоматического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
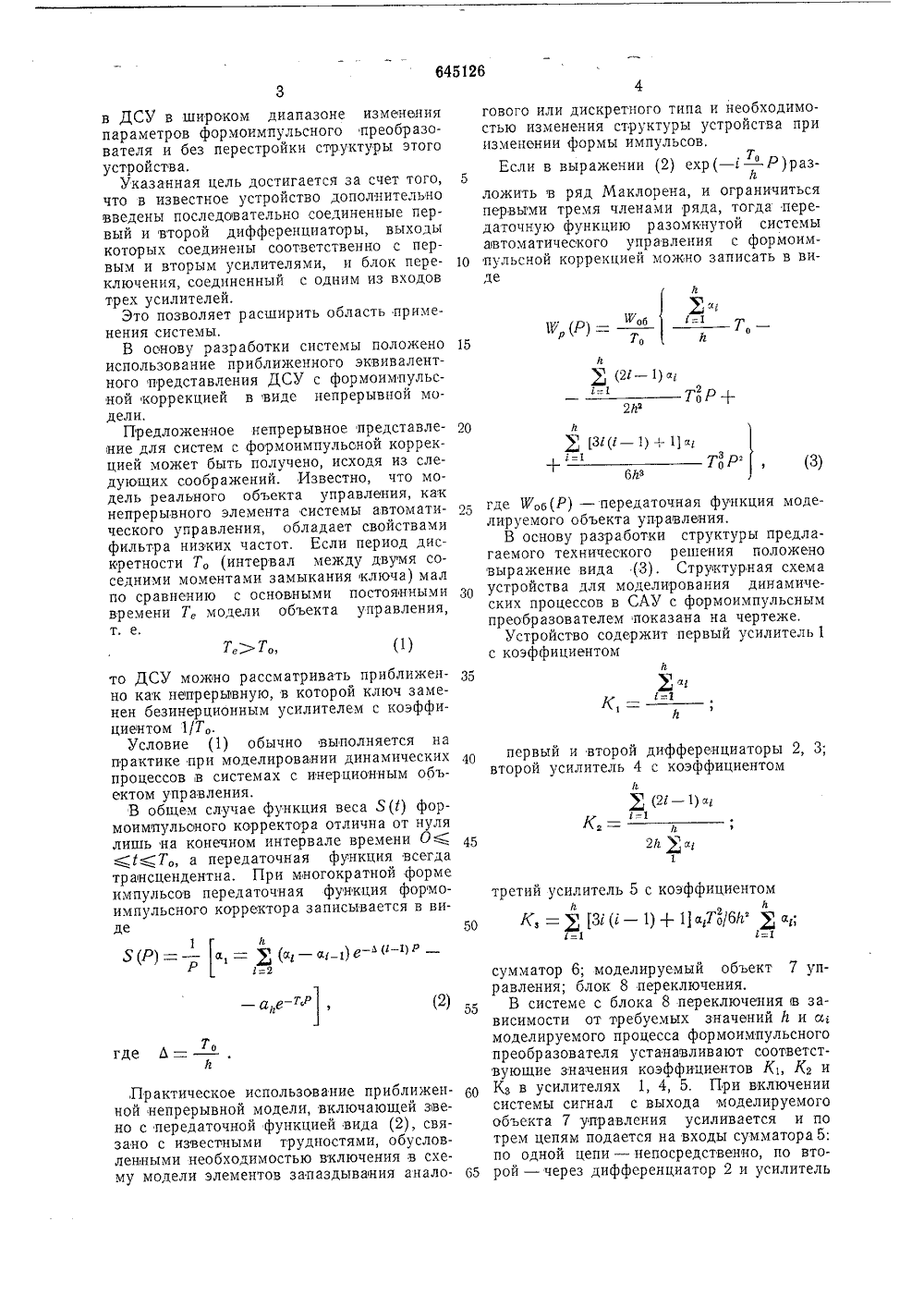
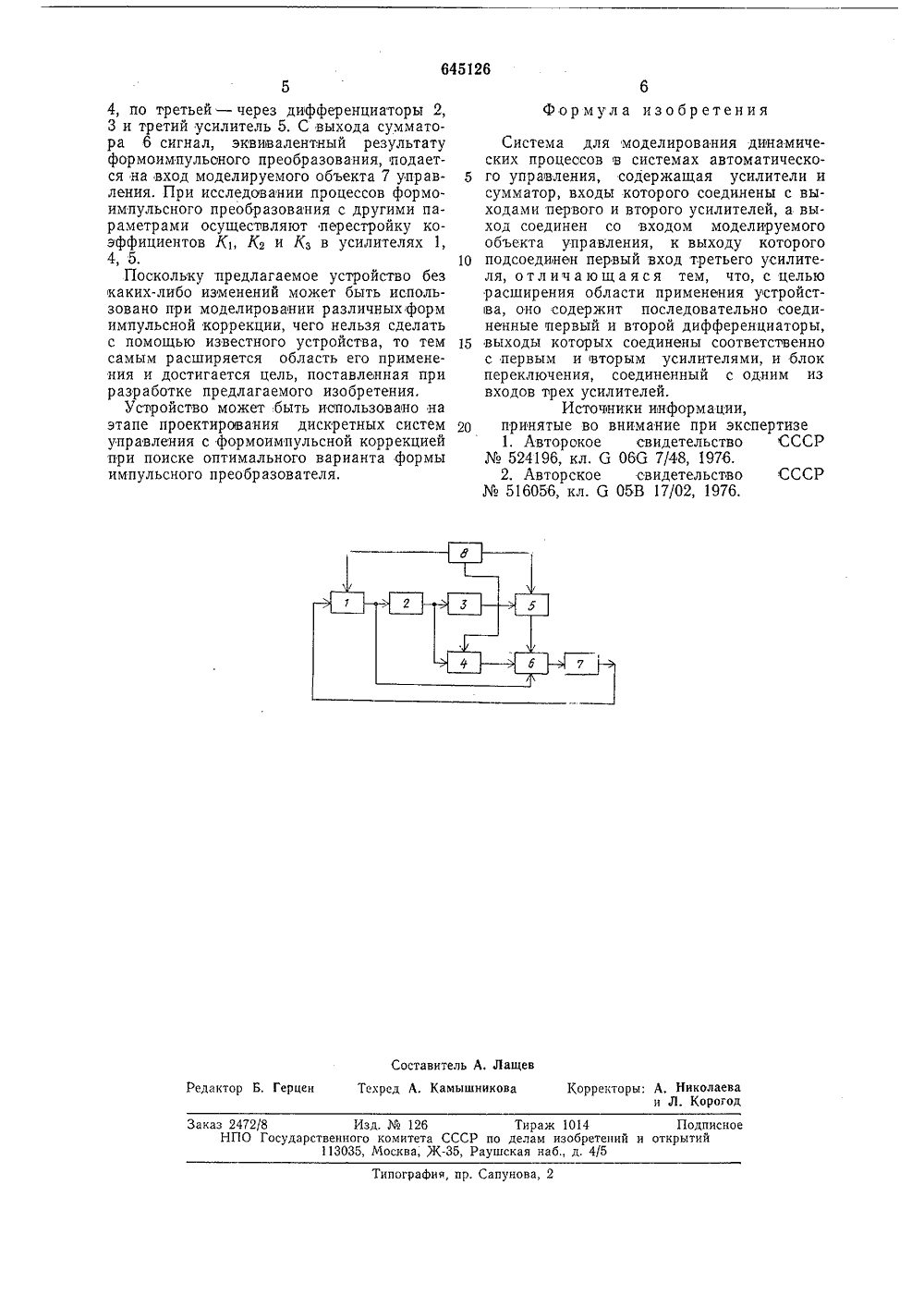
) 64926 ОПИСАНИЕйИЗОБРЕТЕНИЯ Союз Советских Ссциплистическнх Республик(51) М 5 В 17/02 соединением заявкиГосударственный комитет СССР(45) Дата опубликования описания 30,01.7 Авторы изобретени В. Кромски шо(54) СИСТЕМА ДЛЯ МОДЕЛИРОВАНИЯНАМИЧЕСКИХ ПРОЦЕССОВ В СИСТЕМАВТОМАТИ ЧЕСКОГО УПРАВЛ ЕН ИЯ Изобретение относится к области вычислительной техники, а именно - к аналоговым вычислительным устройствам, применяемым для моделирования дискретных систем, и может быть использовано при исследовании динамических процессов в дискретных системах управления (ДСУ)в которых осуществляется формоимпульсное пр еоор азов ание.Известны системы для моделирования динамических процессов в системах автоматического управления различного назначения, содержащие такие звенья как моделируемый объект управления, блок управления, сумматор, блок усиления, интегратор 1. Такие устройства могут быть использованы для моделирования лишь непрерывных систем управления. Это их недостаток.Прототипом предложенной системы является система для моделирования динамических процессов в системах автоматического управления, содержащее усилители и сумматорвходы которого соединены с выходами первого и второго усилителей, а выход соединен со входом моделируемого объекта управления, к выходу которого подсоединен первый вход третьего усилителя 12.Недостаток известного устройства заключается в том, что область его применения ограничена, во-первых, возможностями мо- ЗО делирования процессов только с фиксированными параметрами формоимпульсного преобразования Ь и а; и, во-вторых, техническими трудностями реализации устройства при моделировании низкочастотных процессов,наличие жестких связей структуры известного устройства с параметрами моделируемого формоимпульоного преобразователя (Ь, а;) исключает возможность его использования при исследовании процессов преобразования в широком диапазоне изменения параметров й и а;. Всякий раз при изменении параметров Ь и а; необходимо менять структуру известного устройства, т. е. его состав и связи элементов, в частности, вводить дополнительные блоки запаздывания.При моделировании низкочастотных процессов реализация известного устройства сопряжена с необходимостью использования конденсаторов и резисторов с большими значениями емкостей и сопротивлений, что представляет известные технические трудности.Целью изобретения является устранение указанного недостатка известного устройства, а именно - расширение области его применения путем обеспечения возможности моделирования динамических процессовТ, Т то ДСУ можно рассматривать приближенно как непрерывную, в которой ключ заменен безинерционным усилителем с коэффициентом ЧТо.Условие (1) обычно выполняется на практике при моделировании динамических процессов в системах с инерционным объектом управления.В общем случае функция веса 5(1) формоимпульсного корректора отлична от нуля лишь на конечном интервале времени О( (1(Т а передаточная функция всегда трансцендентна. При многократной форме импульсов передаточная функция формоимпульсного корректора записывается в виде 1 й 5(Р) = - а, = (ае - ае - 1) е - е - 11 1=2,Практическое использование приближенной непрерывной модели, включающей эвено с передаточной функцией вида (2), связано с известными трудностями, обусловленными необходимостью включения в схему модели элементов запаздывания аналов ДСУ в широком диапазоне изменения параметров формоимпульсного преобразователя и без перестройки структуры этого устройства.Указанная цель достигается за счет того, что в известное устройство дополнительно введены последовательно соединенные первый и второй дифференциаторы, выходы которых соединены соответственно с первым и вторым усилителями, и блок переключения, соединенный с одним из входов трех усилителей.Это позволяет расширить область применения системы.В оонову разработки системы положено использование приближенного эквив алентного представления ДСУ с формоимпульсной коррекцией в виде непрерывной модели.Предложенное непрерывное представление для систем с формоимпульоной коррекцией может быть получено, исходя из следующих соображений. Известно, что модель реального объекта управления, как непрерывного элемента системы автоматического управления, обладает свойствами фильтра низких частот, Если период дискретности Т, (интервал между двумя соседними моментами замыкания ключа) мал по сравнению с основными постояиными времени Т, модели объекта управления, т. е, гового или дискретного типа и необходимостью изменения структуры устройства при изменении формы импульсов.Если в выражении (2) ехр( - 1 - Р)раз. То 5 йложить в ряд Маклорена, и ограничиться первыми тремя членами ряда, тогда передаточную функцию разомкнутой системы автоматического управления с формоим пульсной коррекцией можно записать в ви- де У (Р) "ф об то+ Е:1 То Р, (3) где Ж,б(Р) - передаточная функция моделируемого объекта управления.В основу разработки структуры предлагаемого технического решения положено выражение вида (3). Структурная схема З 0 устройства для моделирования динамических процессов в САУ с формоимпульсным преобразователем показана на чертеже.Устройство содержит первый усилитель 1с коэффициентом35 й 3 Е=1 К,=Ь первый и второй дифференциаторы 2, 3; второй усилитель 4 с коэффициентом Етретий усилитель 5 с коэффициентомй250 К, =131 (е - 1) + 11 аеТо 6 Ьае,Е=1 сумматор 6; моделируемый объект 7 управления; блок 8 переключения.В системе с блока 8 переключения в зависимости от требуемых значений Ь и ае моделируемого процесса формоимпульсного преобразователя устанавливают соответствующие значения коэффициентов Кь К, и 60 Кз в усилителях 1, 4, 5. При включениисистемы сигнал с выхода моделируемого объекта 7 управления усиливается и по трем цепям подается на входы сумматора 5: по одной цепи - непосредственно, по вто рой - через дифференциатор 2 и усилитель645126 Формула изобретения Составитель А. Лащев Редактор Б, Герцен Техред А. Камышникова Корректоры; А, Николаева и Л. КорогодЗаказ 2472/8 Изд Мо 126 Тираж 1014 Подписное НПО Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5Типография, пр. Сапунова, 2 54, по третьей - через дифференциаторы 2, 3 и третий усилитель 5. С выхода сумматора 6 сигнал, эквивалентный результату формоимпульоного преобразования, подается на вход моделируемого объекта 7 управления. При исследовании процессов формоимпульсного преобразования с другими параметрами осуществляют перестройку коэффициентов Кь К 9 и К, в усилителях 1, 4, 5.Поскольку предлагаемое устройство без каких-либо изменений может быть использовано при моделировании различных форм импульсной коррекции, чего нельзя сделать с помощью известного устройства, то тем самым расширяется область его применения и достигается цель, поставленная при разработке предлагаемого изобретения.Устройство может быть использовано на этапе проектирования дискретных систем управления с формоимпульсной коррекцией при поиске оптимального варианта формы импульсного преобр азователя,Система для моделирования динамических процессов в системах автоматическо 5 го управления, содержащая усилители исумматор, входы которого соединены с выходами первого и второго усилителей, а выход соединен со входом моделируемогообъекта управления, к выходу которого10 подсоединен первый вход третьего усилителя, отличающаяся тем, что, с цельюрасширения области применения устройства, оно содержит последовательно соединенные первый и второй дифференциаторы,15 выходы которых соединены соответственнос первым и вторым усилителями, и блокпереключения, соединенный с одним извходов трех усилителей.Источники информации,20 принятые во внимание при экспертизе1. Авторское свидетельство СССРМо 524196, кл, 6 066 7/48, 1976,2. Авторское свидетельство СССРМа 516056, кл. 6 05 В 17/02, 1976.
СмотретьЗаявка
2453261, 16.02.1977
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
АРДАШОВ АВГУСТ АНАТОЛЬЕВИЧ, КРОМСКИЙ БОРИС ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 17/02
Метки: динамических, моделирования, процессов, системах
Опубликовано: 30.01.1979
Код ссылки
<a href="https://patents.su/3-645126-sistema-dlya-modelirovaniya-dinamicheskikh-processov-v-sistemakh-avtomaticheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система для моделирования динамических процессов в системах автоматического управления</a>
Устройство для моделирования линейных динамических систем

Номер патента: 742974
Опубликовано: 25.06.1980
Авторы: Гутенмахер, Тимошенко
МПК: G06G 7/48
Метки: динамических, линейных, моделирования, систем
...временной,переменной 1,=1 дС, .=1,2,п,Гез ограничения общности. полагаем К( 0 на всем интервале изменения независимой переменнойУстройство работает следующим образ ом.В исходном состоянии ячейки распределителя 3, регистра 4, блока памяти 5 хранят нулевую информацию,конденсаторы в цепях обратной связиинтеграторов 10 заряжены до напряжений, уровни которых определяются некоторым начальным приближением к искомому решению 2(1) (в частности,это может быть нулевой вектор),Ключи коммутатора 9 разомкнуты исвязь между дополнительной резисторной сеткой 8 и блоком интеграторов1 О отсутствует,Работа устройства начинается приходом сигнала Пуск, по которомугенератор 1 вырабатывает импульс,по.ступающий на вход распределителя 3и вход функционального...
Устройство для моделирования многополюсных линейных стационарных объектов

Номер патента: 1718247
Опубликовано: 07.03.1992
Автор: Воробкевич
МПК: G06G 7/48
Метки: линейных, многополюсных, моделирования, объектов, стационарных
...масштабирующих элементов второй группы, входы которых соединены с выходами одного из25 инерционных блоков, равно 2 п-г+1) в , приг этом в каждом инерционном блоке каждый 1-й сумматор, 1=1,г, соединен своими в+1 Моделирование матрицы Но осуществляется с помощью масштабирующих элементов первой группы, каждый из которых состоит из безынерционного звена и переключателя, позволяющего в соответствии со знаком элемента матрицы Но подключить выход безынерционного звена к соответствующему входу сумматора. Моделирова н и е сл а гаем ы х й;/(р-А), соответствующих вещественным корням ионин ома Чг (р, и слагаемых Рр/(р +Ьцр+Ьо) и 0/(р +Ь 1 р+Ьо), соответствующих парам комплексных корней, выполняется с помощью а-входовых инерционных блоков и...
Устройство для моделирования размещения плоских геометрических объектов

Номер патента: 1200295
Опубликовано: 23.12.1985
МПК: G06N 1/00
Метки: геометрических, моделирования, объектов, плоских, размещения
...тринадцатого триггера, единичный выходкоторого соединен с вторым входомшестнадцатого элемента И, выход которого через тринадцатый формирователь импульса соединен с управляющимвходом второго блока коммутации, нулевым входом тринадцатоготриггера и единичным входом четырнадцатого триггера, единичный выход которого соединен с вторым входом семнадцатого элемента И, выходкоторого через четырнадцатый формирователь импульса соединен с нулевым входом четырнадцатого тригге1200295ра и вторым входом восемнадцатогоэлемента И, выход которого черезпятнадцатый формирователь импульса соединен с входом сброса счетчикаперебора элементов а,п-мерного поляразмещения объекта, и-кратный выходкоторого соединен с вторыми входами вторых элементов И ячеек...
Устройство для моделирования нелинейных законов управления объектами

Номер патента: 299829
Опубликовано: 01.01.1971
Автор: Алексаков
МПК: G05B 13/02
Метки: законов, моделирования, нелинейных, объектами
...через геометрический ЗО образ нелинейного закона управления в фазовых координатах объекта.Иа чертеже представлена блок-схема предложенного устройства для моделирования нелинейных законов управления объектами.Входом электромеханического блока 1 задания нелинейного оптимального закона управления, реализуемого на его контактном полс, является механическая связь скользящего контакта этого блока с кареткой двух- координатного регистратора 2, входы которого подсоединены к сумматору 3 и блоку 4 дифференцирования, которые связаны с выходом модели 5 объекта, вход которой подключен к блоку 1 задания закона управления.Сигнал, пропорциональный текущим значениям фазовых координат объекта, с электро- механического блока 1 подается на выходы...
Устройство для моделирования упругих связей заякоренных объектов

Номер патента: 397414
Опубликовано: 01.01.1973
МПК: B63B 9/02
Метки: заякоренных, моделирования, объектов, связей, упругих
...объекта, установленная в опытовом оассейне глубиной Рг соединеца моделью гцбкоц нерастяжимой связи 2 с неподвижной опороц 3, расположенной выше дна ца расстоянии /г равном недостатку глубины по отношенцю к глубине й, подобной моделируемой, т. е. гг.=гг - г На дне бассейна установлена горизонтально подвижная опора 4, к которой присоедогнена связь 2 в точке, делящей связь на участки длиной 5 ц 5, прямо пропорциональные их вертикальным проекциям 61 и йе, т. е. 5=5 - иЬ, йЬ5,.=5 - , где 5 - длина связи, геометрически подобная моделируемой. При этом полные веса каждого участка связи по обе стороны от опоры равны между собой и,равны каждый полному весу модели, геометрически подобной якорной связи, т. е. вес участка длиной 5 г равен весу...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство для адаптивного управления многошпиндельным станком
Случайный патент: Способ определения полноты регенерации алюмоплатинового катализатора риформинга