Способ коррекции систем автоматического управления движением объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 624202
Авторы: Верескунов, Силаев, Таранова

Текст
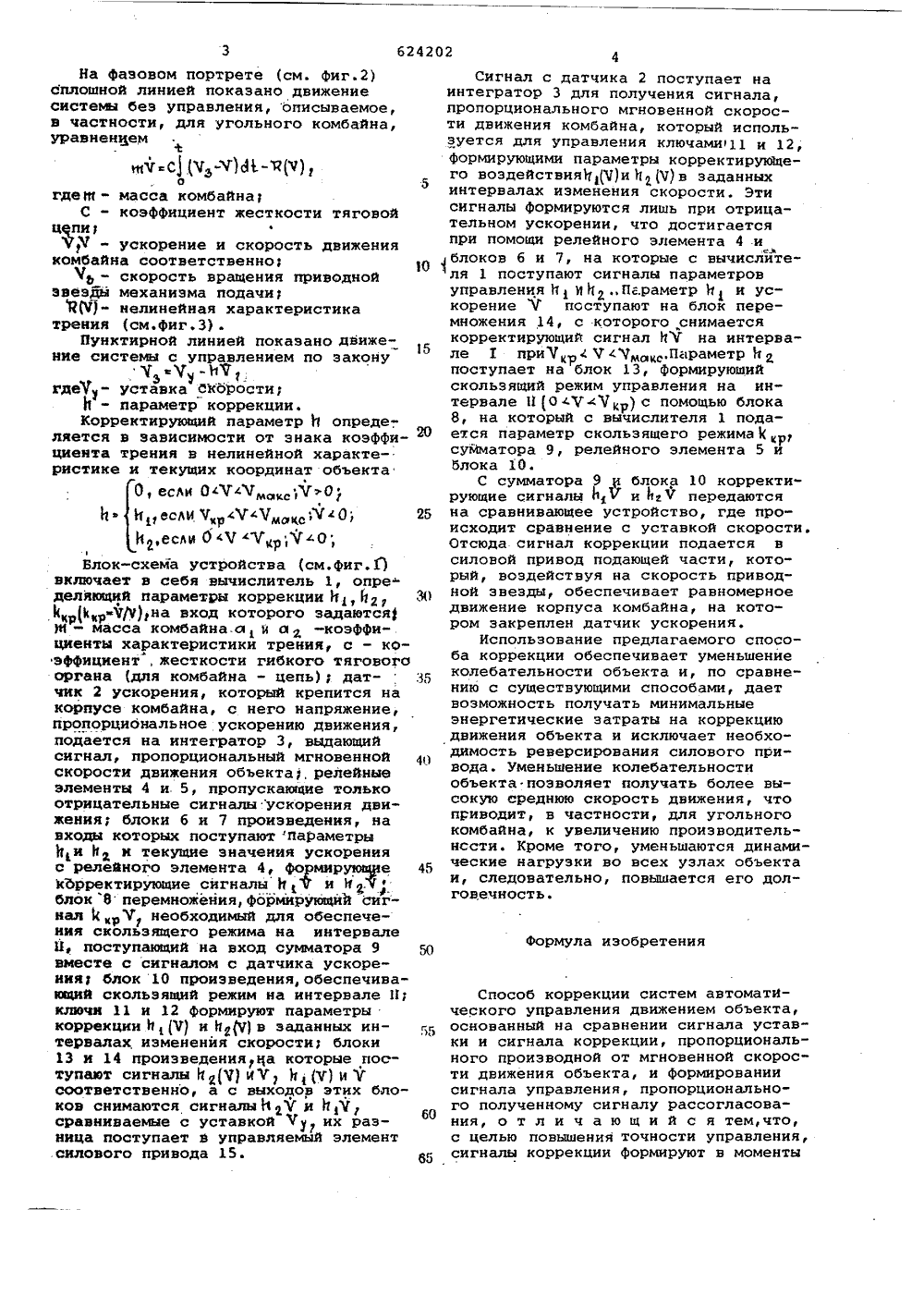
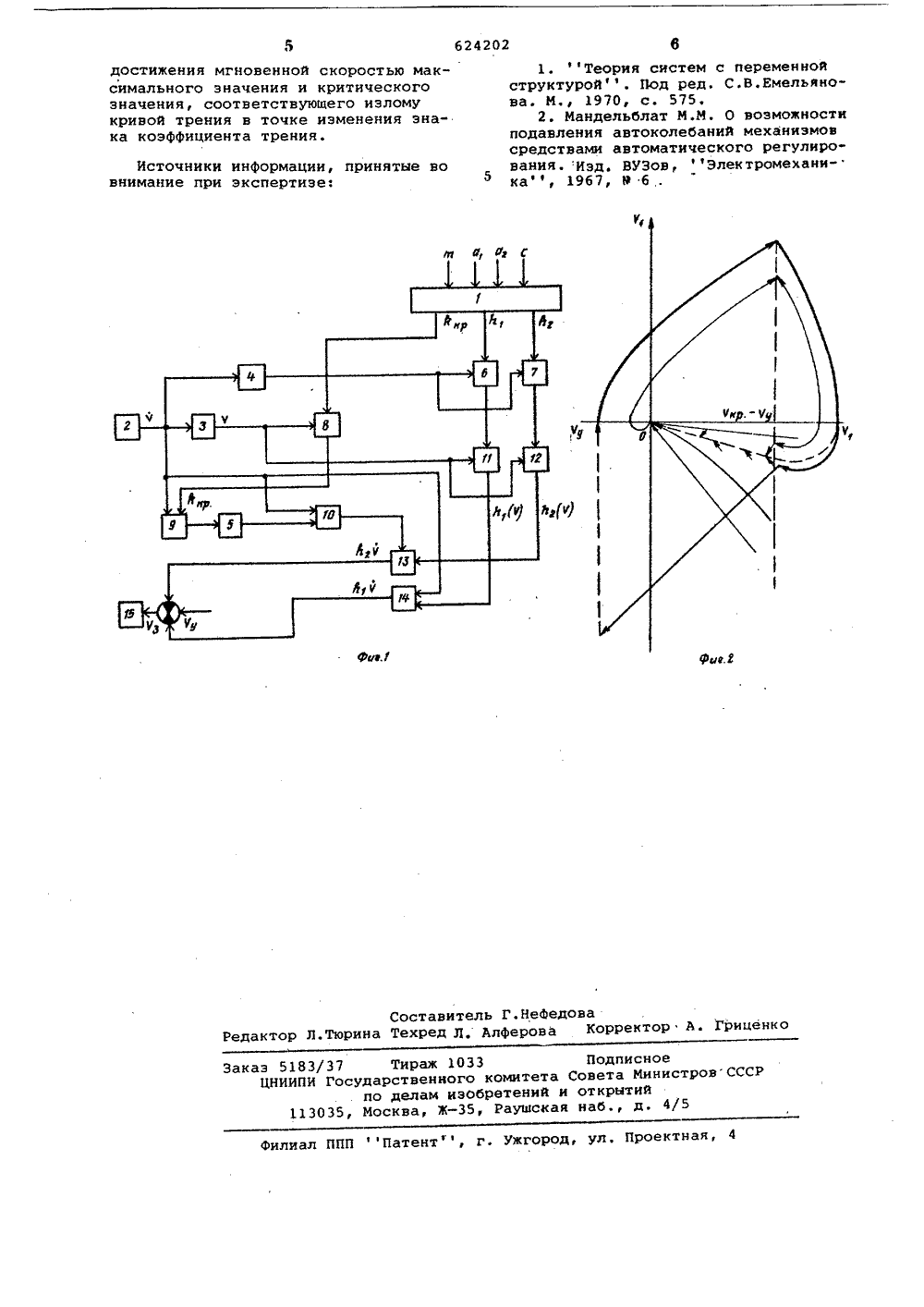
(Щ М. Кл. Я 05 В 5/01 Государствеииый комитетСовета Мниистров СССРио делам изобретеиийи открытий(45) Лата опубликования описания 080878(54) СПОСОБ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБ 1 ЬЕКТАИзобретение относится к автоматике и может быть использовано в системах автоматического управления движением угледобывающих комбайнов.Известные способы коррекции систем автоматического .управления движением объекта, основанные на введении корректирующего сигнала по ускорению движения в закон управления, преследуют цель срыва.автоколебаний движущегося объекта (1). Однако существующие способы не .учитывают естественного изменения структуры объекта в томслуЧабкогда колебания вызваны влияйием нелинейной характеристики трения. Наиболее близким к изобретению по 1 ехнической сущности и достигаемому результату является способ коррекции системы автоматического управления движением объекта, основанный на сравнении сигнала уставки и . сигнала коррекции, пропорционального производной от мгновенной скорости движения объекта, и Формировании сигнала управления, пропорционального йолученному сигналу рассогласования 2) Этот способ рассматривает только условия стабилизации движения в фиксированной точке падающего участ. ка нелинейной характеристики и не учитывает всего диапазона ее изменения (корректирующий сигнал не зависигот текущих координат объекта), чтоне пбэволяет выбирать параметры сис темы управления для конкретно рассматриваемого типа нелинейности сучетом ограниченных энергетическихвозможностей привода и требований ккачеству регулирования. Ограниченные 10 энергетические возможности приводатребуют допустимых значений корректирующего сигнала и быстродействия системы по воэможности без реверсирования исполнительного механизма. ф Для уменьшения колебательностиобъекта в процессе движения, т.е. повышения точности управления предлагается способ, заключающийся в том, чтосигналы коррекции Формируют в моментдостижения мгновенной скоростью максимального значения и критическогозначения, соответствующего изломукривой трения в точке изменения знака коэффициента трения.ф На фиг.1 представлена блок-схемаустройства для реализации предлагаемого способа на фиг.2 - фазовыйпортрет системы, формирующей корректирующий сигнал предлагаемым спосо- З бом.ираж 1 твенно елам и ва, Жмитетатенийаушска ссуда по 5, МоФилиал ППП фПатентф, г. Ужгород, ул. Пр достижения мгновенной скоростью максимального значения и критическогозначения, соответствующего изломукривой трения в точке изменения знака коэффициента трения. Источники информации, принятые вовнимание при экспертизе: 1. Теория систем с переменной структурой. Под ред, С.В.Емельянова. М., 1970, с. 575,2. Иандельблат И.М. О воэможности подавления автоколебаний механизмов средствами автоматического регулиро вания. Иэд, ВуЗов, ффЭлектромеханикаф, 1967, Р 6 .
СмотретьЗаявка
2173722, 10.07.1975
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "АВТОМАТГОРМАШ"
ВЕРЕСКУНОВ ВАДИМ НИКОЛАЕВИЧ, СИЛАЕВ ВИКТОР ИВАНОВИЧ, ТАРАНОВА ЛЮДМИЛА АЛЕКСАНДРОВНА
МПК / Метки
МПК: G05B 5/01
Метки: движением, коррекции, объекта, систем
Опубликовано: 15.09.1978
Код ссылки
<a href="https://patents.su/3-624202-sposob-korrekcii-sistem-avtomaticheskogo-upravleniya-dvizheniem-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции систем автоматического управления движением объекта</a>
Приемник однополосного сигнала с угловой модуляцией для систем связи с передачей знака производной полезного сигнала

Номер патента: 1734214
Опубликовано: 15.05.1992
МПК: H04B 1/06
Метки: знака, модуляцией, однополосного, передачей, полезного, приемник, производной, связи, сигнала, систем, угловой
...линейного блока, введены генератор тактовых импульсов и соединенные последовательно амплитудный детектор, вход которого соединен с выходом сигнала несущей линейного блока, весовой элемент, делитель напряжения, аналого-цифровой преобразователь, тактовый вход которого соединен с выходом генератора тактовых импульсов, функциональный преобразователь вида:Е(с) = агсзпзп 1(т,5 10 15 20 25 30 35 40 45 50 55 блок вычисления, осуществляющий преобразования вида:Й(т) - Л Е(с) при х0б(т) =хн(с) + ь Р и ри хО,где ЛЦт) = 1 Еь (с) - Е;(т) 1;х - знак производной,другой сигнальный вход которого соединен с выходом детектора знака производной, а тактовый вход соединен с выходом генератора тактовых импульсов, и цифроаналоговый преобразователь,...
Устройство для приема информации и передачи команд об изменении движения транспортных средств

Номер патента: 642759
Опубликовано: 15.01.1979
Авторы: Казакова, Ламерт, Соловьев, Хайлов
МПК: G08G 1/09
Метки: движения, изменении, информации, команд, передачи, приема, средств, транспортных
...распределитель 13, который переходит на следующую позицию и начинает опрос следующего контрольного пункта.При обнаружении ошибки весь блок принятой информации стирается, а иэ блока режимов 12 через открытые трансляторы 8 и коммутатор 5 посылается команда на повторную передачу информации с данного транспортного средства. Если после трехкратного повторения информация будет принята с ошибкой, из блока приема и проверки информации 10 через блок сопряжения 11 посылается сигнал оператору о неисправности данного канала связи,а в блок режимов 12 в ,команда на переход к опросу следующего контрольного пункта. По этой команде блокрежимов 12 запускает распределитель13, который переходит на следующуюпозицию и открывает последующие коммутатор 5 и...
Приспособление для сообщения каретке пишущей машины движения, согласованного с движением каретки счетной машины

Номер патента: 26836
Опубликовано: 30.06.1932
Автор: Алексеев
МПК: G06C 23/04, G06C 25/00, G06C 29/00
Метки: движением, движения, каретке, каретки, пишущей, согласованного, сообщения, счетной
...контакты 7 цепи электромагнитных муфт. На планке 9, расположенной на каретке пишущей машины вдоль валика, несущего бумагу, нанизан ряд движков 10; на каждом движке имеются двуплечий рычажок 11 и упор 12. Первый можетили принимать вертикальное направле. ние, которое поддерживается упором 12, или отклоняться в сторону, обратную от упора. Около буквораспределителя на стойке расположен второй рычажок 13, могущий соприкасаться с рычажком 11 при его вертикальном положении и отклоняться последним в сторону при движении каретки, чему способствует упор 12.Около рычажка 13 расположены контакты 14 и 15, к которым он может прикасаться, и коленчатый рычажок 17 могущий отводить конец рычажка 13 с контакта 15 на контакт 14. Там же, на неподвижной...
Устройство адаптивной коррекции сигнала

Номер патента: 499681
Опубликовано: 15.01.1976
МПК: H04B 15/00
Метки: адаптивной, коррекции, сигнала
...7 коэффициентов.Устройство работает следующим образом.Очередная выборка сигнала, поступающаяс периодом Т из канала связи, содержит десять двоичных разрядов, Каждый бит десяти разрядной выборки сигнала вводят в регистр 1, предварительно сдвинув его содержимое на один разряд вправо, при этом содержимое крайнего правого разряда стирается.В умножителе 4 производят поочередное зо умножение всех хранимых в регистре 1 выбо499681 ль Р. ДубоСеменов Состав Техред Редактор Т. Янов орректор М. Лейзерма Тираж 740овета Министоткрытийая наб., д. 4/5 Изд.1126 ПИ Государственного комитета С по делам изобретений и 113035, Москва, Ж, РаушскПодпис каз 37 И 10 Т, Загорский филиа 3рок сигналов на соответствующйе коэффициенты усиления, накапливаемые в регйстре...
Устройство для изменения передаточного отношения в механической системе управления летательным аппаратом

Номер патента: 621152
Опубликовано: 20.06.2005
Авторы: Авакян, Константинов, Тихомиров, Чистяков
МПК: B64C 13/28
Метки: аппаратом, изменения, летательным, механической, отношения, передаточного, системе
Устройство для изменения передаточного отношения в механической системе управления летательным аппаратом, содержащее входную качалку, одно из плеч которой соединено с механической проводкой от рычага управления, а второе – с приводом изменения передаточного отношения, и выходную качалку, связанную с проводкой к рулевой поверхности, отличающееся тем, что, с целью повышения надежности и увеличения пределов изменения передаточного отношения, в него введены вспомогательная качалка, связанная с приводом изменения передаточного отношения, и -образное промежуточное звено, вершина которого связана тягами со вспомогательной и...
Предыдущий патент: Способ нелинейной коррекции привода
Следующий патент: Регулирующее устройство
Случайный патент: Узел смазки