Способ нелинейной коррекции привода
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Сфюэ Советских Социалистических Респубпик(45) Дата опубликования описания 070878(51) М. Кл. ( 05 В 5/01 Государственный комитетСовета Министров СССРпо ледам изобретенийн откр ытнй(54) СПОСОБ НЕЛИНЕЙНОЙ КОРРЕКЦИИ ПРИВОДА Изобретение относится к системам 1 автоматического управления (САУ) и может быть использовано, в частности, в приводах систем управления летательных аппаратов. бИзвестен способ коррекции привода (11 , сущность которого заключается в том, что производят пробное торможение привода до снижения скорости до определенного значения, измеряют 10 длину пути пробного торможения и по нему вычисляют момент начала окончательного торможения. Однако подобная коррекция может быть использована только в разомкнутых приводах, кроме 1 о того, она становится неэффективной при отработке приводом переменного сигнала управления.Наиболее близким по технической сущности к предлагаемому является спо соб нелинейной коррекции привода путум сравнения входного и выходного сигналов привода и фиксации экстремального значения выходного сигнала, При этом входной сигнал сначала расщепляют и восстанавливают полное значение его при достижении выходным сигналом экстремального значения (2).Недостатком такого спосбба являет,- ся то, что он может быть использован только при отработке системой возрастающего от нулевого значения ступенчатого входного сигнала.Целью изобретения является расширение области применения способа.Поставленная цель достигается тем, что коРрекцию осуществляют с момента равенства входного и выходного сигналов до момента достижения выходным сигналом экстремального значения ступенчатым сигналом, равным проинвертированному входному сигналу, с момента достижения выходным сигналом экстремального значения - сигналом, равным нулю. На фиг.1 представлена одна нэ возможных схем, реализующая предлагаете способ; на фиг.2 - графики выходного сигнала Хвыл (Ц нескорректированного И и скорректированного И приводов при отработке им управляющего входного сигнала фИ.)1На фиг.1 представлены; 1 - усилитель привода, 2 - силовой механизм, 3 - элемент единичной обратной связи, 4 - логическое устройство определения знака ошибки; 5 - логическое устройство определения экстремума выходного сигнала, 6,7 - ключи.624201 Формула изобретения 2.1 ПП Патент, од, ул. Проектная Филиа г. Уж 3Рассмотрим работу скорректированного привода на примере отработки им ступенчатого выходного сигнала.До момента времени 1 1 работа скорректированного привода: аналогична работе нескорректированного, так как ключ 6 открыт и на вход усилителя привода 1 поступает; сигнал ошибкий(Ч-вь.1)При достижении равенства и выходного сигналов (момент времени 1 1) логическоеустройство- определения знака ошибки 4 выдает сигнал на закрытие ключа 6, снимая тем самым сигнал управления со входа усилителя привода 1. ВРбзультате этого на вход привода подается только корректирующий сигнал, равный проинвертированному выходному сигналу, что означает тормозной эффект и существенно уменьшает перерегулирование.При достижении выходным сигналом экстремального значения логическое устройство определения экстремума 5 выдает команду на открытие ключа 7. Замыкаясь, ключ 7 вновь подключает сигнал управления на вход усилителя привода 1, исключая в дальнейшем свободное движение в приводе.Работа схемы при отработке входного сигнала иного вида происходит аналогично,Использование предлагаемого спосО- ба коррекции позволяет существенно расширить область его применения, а именно, позволяет осуществлять коррекцию привода при отработке им входных сигналов любого вида. Способ нелинейной коррекции привода путем сравнения входного и выходного сигналов привода и фиксацииэкстремального значения выходногосигнала, отличающийсятем, что, с целью расширения областиприменения способа, в нем коррекцию 16 осуществляют с момента равенствавходного и выходного сигнаЛов до момента достижения выходным сигналомэкстремального значения ступенчатымсигналом, равным пройнвертированному 20 входному сигналу, с момента достижения выходным сигналом экстремальногозначения - сигналом, равным нулю,Источники информации, принятыево внимание при экспертизе: р 6 1. Авторское свидетельство СССР9 208071, кл 9 05 В 5/01, 1964.2. ПестельТэлер. Анализ и расчет нелинейных систем автоматического управления, фЭнергия, М., 1964, 30 с383-386. НИИПИ Заказ 5183/3ираж 1033 Подписное
СмотретьЗаявка
2105113, 14.02.1975
СЕРПУХОВСКОЕ ВЫСШЕЕ КОМАНДНОЕ УЧИЛИЩЕ ИМЕНИ ЛЕНИНСКОГО КОМСОМОЛА
СОРОКИН ЮРИЙ СТЕПАНОВИЧ, ДАНЬШИН ВИКТОР ТЕРЕНТЬЕВИЧ
МПК / Метки
МПК: G05B 5/01
Метки: коррекции, нелинейной, привода
Опубликовано: 15.09.1978
Код ссылки
<a href="https://patents.su/2-624201-sposob-nelinejjnojj-korrekcii-privoda.html" target="_blank" rel="follow" title="База патентов СССР">Способ нелинейной коррекции привода</a>
Устройство для ограничения входного сигнала прямой полярности кристаллического триода

Номер патента: 119545
Опубликовано: 01.01.1959
МПК: H03F 3/04, H03G 11/04
Метки: входного, кристаллического, ограничения, полярности, прямой, сигнала, триода
...вход каскада и исключающий провалы выходного, сигнала. Для ограничения же входного сигнала обеих полярностей и защиты усилителя от недопустимого напряжения эмиттерного перехода между базой и частью опорного напряжения, устанавливающего потенциал базы, предлагается включать второй вентиль.Предлагаемое устройство содержит два диода 1 и 2, один из которых включен между частью сопротивления 8 смещения коллекторной цепи и базой триода 4, а другой - между базой триода 4 и частью сопротивления б смещения эмиттерной цепи, При малых сигналах диод 1 заперт опорным напряжением 0,1 и все напряжение поступает на вход каскада При напряжении сигнала, равном напряжению О, диод 1 открывается и шунтирует вход каскада. Рост эмиттерного тока при этом...
Способ измерения переходных процессов в электронных блоках при скачке фазы входного сигнала и устройство для его осуществления

Номер патента: 1200192
Опубликовано: 23.12.1985
Автор: Власов
МПК: G01R 25/00
Метки: блоках, входного, переходных, процессов, сигнала, скачке, фазы, электронных
...позволяетсоздать устройства по измерению иконтролю переходных процессов в аппаратуре, где в качестве испытательного сигнала используется непосредственно сигнал, обрабатываемый электронной схемой (например, в аппаратуре гетеродинной обработки ЛЧИ сигналов), Отсутствие необходимости ваппаратуре, Формирующей испытательный сигнал, позволяет получить эко,номический эффект,35 Изобретение относится к измерительной технике и предназначено для исследования фазовых характеристик электронных блоков.Целью изобретения является повы шение точности.На фиг. 1 представлена блок-схема устройствареализующего способ измерения переодных процессов в электронных блоках при скачке фазы 1 О входного сигнала; на фиг, 2 - временные диаграммы, поясняющие его...
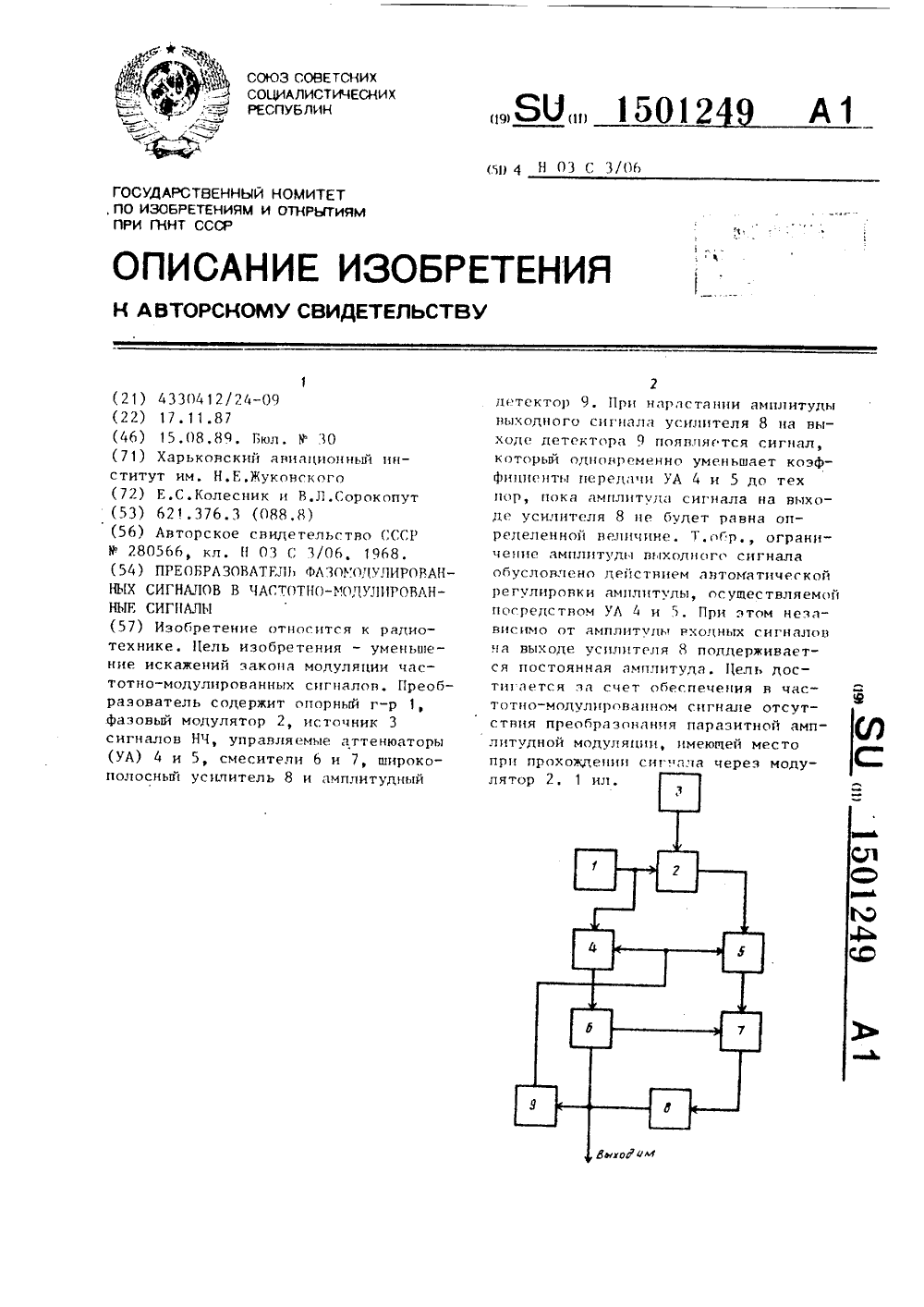
Преобразователь фазомодулированных сигналов в частотно модулированные сигналы
Номер патента: 1501249
Опубликовано: 15.08.1989
МПК: H03C 3/06
Метки: модулированные, сигналов, сигналы, фазомодулированных, частотно
...сигнала, поступающие на второй вход смесителя 6. После пребразвация в смесителях 6 и 7 эти флуктуации поступают на вход широкополосного усилителя Й.Таким образом, широкополосный усилитель 8 оказьнается охваченным це пью обратной связи, входом которой является вторй вход смесителя 6, а выходом - выход смесителя 7, Эта цепь обратной связи является четырехт- люсником братнси гнязи (ЧОС), 11 р 55 выполнении ус пццй ба 1 анса фаз ц амплитуд ц авго батеп цой сигтсме, образоваци и епццеццыми в кол ц,ипрон цпи ьм у цпцттп и 8 и 1 РС, цэцкают .иебацця с чагттой Г аавци й т раапсти фаз колебаний, п.тупанщих ца входы смесителей Ь и 7, Иа выходе смегитсля 6 вьде.нетс я ги цап с частотойгде Г- чагтота сигнала ца выходеаттецюаторов 4 и 5,Г -...
Устройство для определения моментов появления экстремумов электрического сигнала

Номер патента: 1647431
Опубликовано: 07.05.1991
Авторы: Волокитин, Кондратьев, Федотов
МПК: G01R 19/04
Метки: моментов, появления, сигнала, экстремумов, электрического
...Е ИЛИ-НЕ 7 установится высокий уровень (фиг.2 б), открывающий ключ 4. В момент , когда напряжение на неинаертирующих входах превысит уровень его на неинвертирующем входе компаратора 1 на величину Ь(фиг.2 а, кривые 2 и 3), срабатывает компаратор 1 - на его выходе устанавливается низкий уровень. Компаратор 6 остается в предшествующем состоянии (фиг,2 с) до момента 1 з. На выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ 7 устанавливается низкий уровень, закрывающий ключ 4. В момент з, когда уровень напряжения на неинвертирующем входе компаратора 6 станет ниже.на величину Ь уровня напряжения на инвертирующих входах (фиг.2 а, кривые 2 и 3), на его выходе установится низкий уровень, а на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ 7 - высокий уровень, открывающий...
Устройство для формирования напряжений, пропорциональных синусу и косинусу входного сигнала

Номер патента: 785873
Опубликовано: 07.12.1980
МПК: G06G 7/22
Метки: входного, косинусу, напряжений, пропорциональных, сигнала, синусу, формирования
...входу кольцевого распределителя 3, выходы которого соединены с первыми входами первых четырех элементов И 4, и к первому входу пятого элемента И 5. Второй вход элемента И 5, подключенного выходом к установочному входу кольцевого распределителя 3, соединен с синхронизирующим входом генератора б синусоидального напряжения и выходом делителя 7 частотына четыре, вход которого подключенк шине синхронизирующих импульсов ивходу делителя 1 частоты иа пять, Вторые входы элементов И 4 соединены с выходом блока 2 регулируемой задержки, а выходы элементов И 4, подключейы к соответствующим управляющим входам блока 8 расширителей, соединенного информационным входом с выходом генератора 6 синусоидального напряжения, Блок 8 расширителей содержит четыре...
Предыдущий патент: Устройство для формирования сигнала управления
Следующий патент: Способ коррекции систем автоматического управления движением объекта
Случайный патент: Способ индикации юстировки электронного луча в электроннолучевых установках