Устройство программного управления стендом для испытаний образцов и конструкций на прочность
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 607185
Авторы: Буланов, Дудник, Кондратенко, Костин, Мазняк, Паценкер, Пугин, Соколянский, Тимченко, Хильченко
Текст
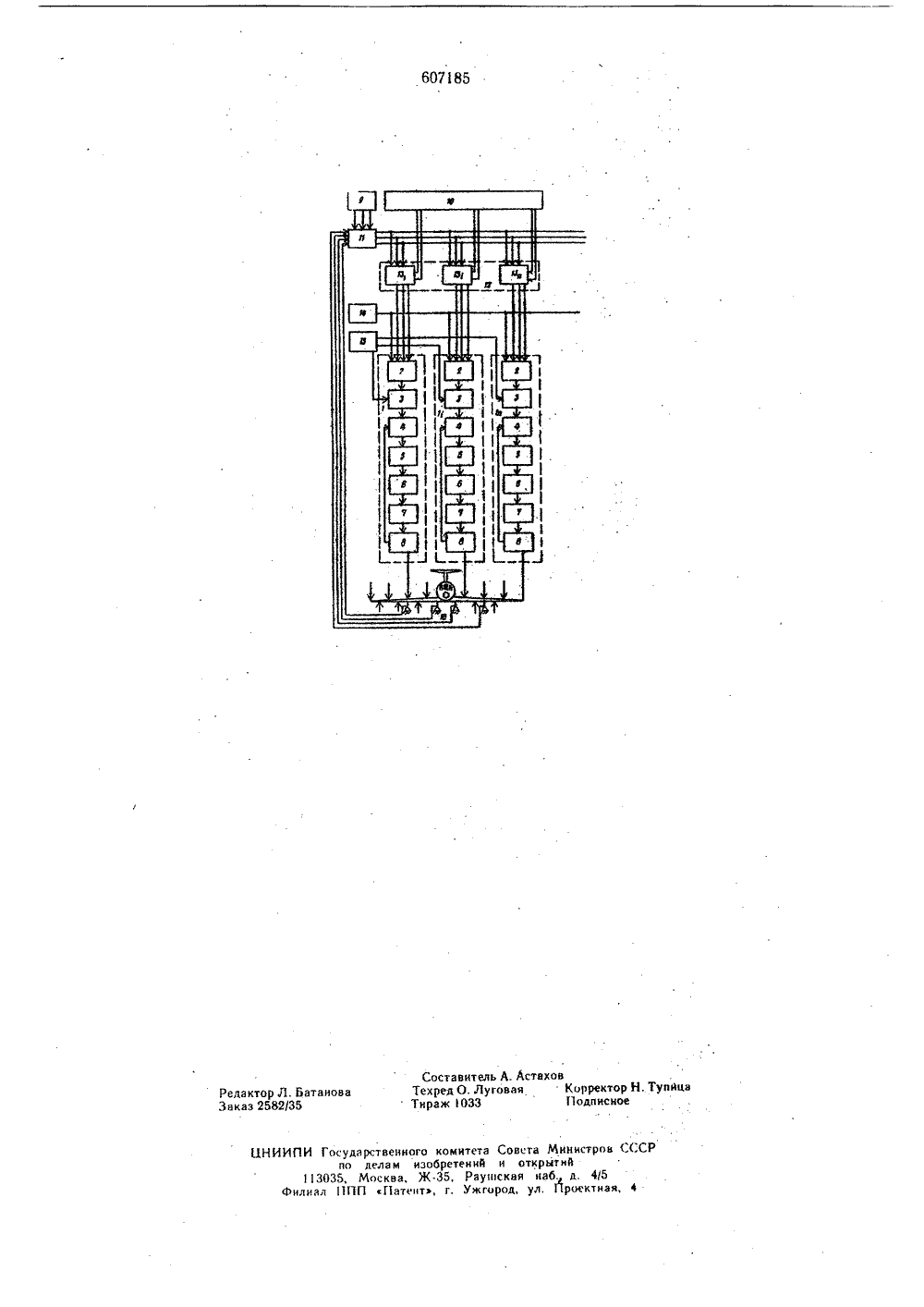
ЯЮВЮЮОВФВФЮВсемюенМ йатентнс ть", .аеваФ Союз Советских Социалистических Республик(43) Опубликовано 15,05,78 Зюллетень18 Ч 01 М 3/32 Государствваеа иоаатвт Соввта Ивннстроа СССР оо делам ивоорвтаова и отнрьпий(45) Дата опубликования описания 87.0 т.1 Ь,В, В, Буланов, М, Ф, йудник, Е, А, Кондратенко,В. Л, Костин, Я. А. Маоняк, Б. Л, Пеценкер, А. П, Пугин,В, П, Соколянский, В, И, Тимченко и А. Г Хильченко(72) Авторы изобретения Харьковский авиационньп 1 институт(54) УСТРОЙСТВО ПРО 1 РАММНО 1 О УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ИСПЫТАНИЙ ОБРАЗЦОВ И КОНСТРУКЦИЙ НА ПРОЧНОСТЬ 1Изобретение относится к области испытаний конструкций на прочность и может найти применение при синхронном нагружении незакрепленных конструкций, например летательных аппаратов, до заданных в каждой точке величин усилий при помощи гидравлических сило- о возбудителей.Известны устройства для нагружения самолетов при статических испытаниях, в которых задача пропорционального нагружения решается применением различного рода редукторов давления 1.Наиболее близким техническим решением к предлагаемому изобретению является многоканальное устройство ппограммного управления стендом для испытания образцов и конструкций на прочность, содержащее блок хранения о максимальных усилий, узел задания усилий, соединенный с электрогидравлическимн следящими приводами с обратной связью по усилию, включающими входной сумматор, масштабный блок, блок выделения сигнала ошибки, усили- , тель ошибки, электрогидравлический преобразователь, гидравлический силовозбуднтель и датчик усилий.Недостатком известных устройств является появление больших погрешностей в прикладываемых нагрузках при испытании незакреп- Ж 2ленных объектов, Кроме того, известные устройства не могут быть использованы для статических испытаний незакрепленных конструкций.11 елью изобретения является обеспечение статических испытаний незакрепленных конструкцийЭто достигается тем, что в предлагаемое устройство введены блок задания положения объекта, блок стабилизации положения объекта, блок пространственного масштабирования, содержащий узел коррекции положения объекта для каждого канала и блок координат силовозбудителей, при этом одни вход блока стабилизации соединен с блоком задания положения объекта, второй вход соединен с датчиками положения объекта, третий вход соединен с блоком задания усилий, а выходы блока стабилизации соединены со входами всех узлов коррекции положения, вторые входы которых соединены с блоком координат силовозбуднтелей, причем, выходы узлов коррекции положения соединены со входамн входных сумматоров соответствующих каналов нагружения.Это обеспечивает синхронное нагружение незакрепленных конструкций прн помощи гидравлических силовозбуднтелей и пропорциональную пространственную коррекцию положенияобъекта в пространствечто уменьшает погрешности в прнкладываемых нагрузках за счетдействия системы стабилизации н обеспечиваетвоэможность испытаний незакрепленных конструкций.На чертеже изображена блок-схема устройства,Устройство содержит п идентичных электрогидравлических следящих приводов 1 с обратной связью по усилию, каждый из которых включает входной сумматор 2, масштабирующий элемент 3, устройство 4 выделения сигнала ошибки, усилитель 5 ошибки, электрогидравлический преобразователЪ 6, гидравлический силовозбудитель 7 и датчик 8 усилий,Кроме этого в устройство входят блок 9 за.дания положения объекта, блок 10 координатсилоозбудителей, блок .11 стабилизации положения объекта, блок 12 пространственного масштабирования, состоящий из узлов 13 коррекции положения объекта для каждого канала,блок 15 хранения максимальных усилий, блок14 задания усилий и датчики 16 положенияобъекта,Устройство работает следующим образом,Переменный во времени сигнал заданногоуровня нагрузки Р (процент нагрузки) от блока 14 задания усилий подаегся на входы сумматоров 2 каналов нагружения. Масштабирующие элементы 3, настроенные в соответствии сданными загрузочной таблицы, хранимой в виде значений максимальных усилий в блоке 15,обеспечивают воспроизведение требуемых вкаждой точке нагрузокЧетыре базовых датчика 16 положенияобъекта, расположенные попарно вдоль размаха крыла и вдоль фюзеляжа, выдают навход блока 1 стабилизации сигналы У, У,т 14, пропорциональные действительному положению объекта, В блоке 11 производится ихобработка по следующим зависимостям:т+% 33 у инЪ=.где Н - вертикальное смещение объекта,угол крена, а - угол тангажа, а е - базамежду парными датчиками,На другие входы блока стабилизации с блока 9 задания положения объекта подаются сигналы заданного положения объекта Но, у о иаоПолученные на выходе блока стабилизациисигналы рассогласования подаются на входыузлов 13 коррекции положения объекта блока12 пространственного масштабирования.На вторые входы узлов 13 поступают значения координат с блока 1 О, отражающие про странственное расположение 1-го силовозбудителя, и производится их умножение на сигналы рассогласования положения объекта. На вы. ходах узлов 13 блока 12 формируются сигналы коррекции, величины которых изменяются по кососимметричному закону в зависимости от значения координаты силовозбудителя по размаху крыла и вдоль фюзеляжа. Таким образом с наименьшей погрешностью в отработке заданных усилий достигаетсякомпенсация моментов крена, тангажа и вертикального смещения, возникающих от небаланса сил, а также создается возможность перемещения в про.странстве. объекта под нагрузкой (путем изменения Но а ае. 5 оНаличие на входе каждого канала нагружения сумматора и масштабирующего элемента позволяет наложить на заданную эпюру нагружения корректирующие распределенные воздействия для стабилизации объекта в простран. стае в процессе нагружения. Формила изобретения Устройство программного управления стендом для испытаний образцов и конструкций 25 на прочность, содержащее блок хранения максимальных усилий, узел задания усилий, соединенный с электрогидравличеакими следящими приводами с обратной связью по усилию,включающими входной сумматор, масштабныйЭо блок, блок выделения сигнала ошибки, усилитель ошибки; электрогидравлический преобразователь, гидравлический силовозбудитель идатчик усилий, отдичаюиееся тем, что, сцелью обеспечения статических испытаний незакрепленных кокс.:рукций, оно снабжено блоком задания положения объекта, блоком стабилизации положения объекта, блоком пространственного масштабирования, содержащимузел коррекции положения объекта для каждого канала и блок координат силовозбудителей,4 о при этом один вход блока стабилизации соеди.нен с блоком задания положения объекта, второй вход соединен с датчиками положенияобъекта, третий вход соединен с блоком задания усилий, а выходы блока стабилизациисоединены со входами всех узлов коррекцииположения, вторые входы которых соединены сблоком координат силовозбудителей, причем,выходы узлов коррекции положения соединены со входами входных сумматоров соответствующих каналов нагруження.Источники информации, принятые во внимание при экспертизе:1, Авторское свидетельство СССР262452,кл. 0.01 И 3/32, 1972.2. Авторское свидетельство СССР339906,кл. б 05 В 19/03, 1974,55607185 Тупйц Редактор Л. Батоно Заказ 2582/35 ПИ Государственного комитета Совета Министров ( по делам изобретениИ н открытнИ 113035, Москва, Ж.35, Раугпскан наб. д. 4/5 нлиал ППП Патент, г, Ужгород, ул. Г 1 роектная, 4
СмотретьЗаявка
2407143, 24.09.1976
ХАРЬКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
БУЛАНОВ ВИТАЛИЙ ВЛАДИМИРОВИЧ, ДУДНИК МИХАИЛ ФЕДОРОВИЧ, КОНДРАТЕНКО ЕВГЕНИЙ АНДРЕЕВИЧ, КОСТИН ВАЛЕРИЙ ЛЕОНИДОВИЧ, МАЗНЯК ЯКОВ АНДРЕЕВИЧ, ПАЦЕНКЕР БОРИС ЛЬВОВИЧ, ПУГИН АЛЕКСАНДР ПАВЛОВИЧ, СОКОЛЯНСКИЙ ВАЛЕРИЙ ПЕТРОВИЧ, ТИМЧЕНКО ВЛАДИМИР ИВАНОВИЧ, ХИЛЬЧЕНКО АЛЕКСЕЙ ГРИГОРЬЕВИЧ
МПК / Метки
МПК: G01N 3/32, G05B 19/02
Метки: испытаний, конструкций, образцов, программного, прочность, стендом
Опубликовано: 15.05.1978
Код ссылки
<a href="https://patents.su/3-607185-ustrojjstvo-programmnogo-upravleniya-stendom-dlya-ispytanijj-obrazcov-i-konstrukcijj-na-prochnost.html" target="_blank" rel="follow" title="База патентов СССР">Устройство программного управления стендом для испытаний образцов и конструкций на прочность</a>
Установка для нагружения конструкций при испытании на усталость

Номер патента: 388203
Опубликовано: 01.01.1973
Авторы: Литвак, Ружинский, Скл
МПК: G01M 5/00
Метки: испытании, конструкций, нагружения, усталость
...усилителей связаны со входами статического триггера на тиристорах 23 и 24 с коммутирующим конденсатором 25. Движки резисторов 10, 11, 12 устанавливаются в положениях, для которых при заданных предельных значениях нагрузок, воспринимаемых потенциометром 9, ток в коллекторной цепи соответствующего транзистора 21 или 22 достаточен для опрокидывания триггера на тиристорах 23 и 24.В цепи катодов тиристоров включены обмотки магнитов 2 б, 27 электроуправляемых золотниковых исполнительных органов, лампы 28, 29, сигнализирующие режимы нагружения и разгрузки, и электроимпульсный счетчик 30 для учета количества циклов нагружения.Для исключения влияния колебаний напряжения питания на точность работы переключающего устройства потенциометр...
Устройство для испытания блоков двигателей внутреннего сгорания

Номер патента: 949371
Опубликовано: 07.08.1982
МПК: G01M 3/00
Метки: блоков, внутреннего, двигателей, испытания, сгорания
...2 - то же, при установкеустройства в испытуемый блок.Устройство состоит из корпуса 1,в котором на осях 2 установленыодноплечие, соединенные между собойупругими элементами 3, рычаги 4 суплотнительными элементами 5 и подвижная штанга б с роликами 7,взаимодействующими с рычагами 4.Штанга б имеет кольцевой буртик 8,одним своим торцом опирается напредварительно сжатую пружину 9,а другим - контактирует с ограничителем 10, К концу штанги б подсоединяется привод 11, обеспечивающийустановку устройства в испытуемыйблок 12 двигателя внутреннегосгорания, герметизацию отверстий13 в блоке и извлечение устройстваиз блока по окончании испытания.Устройство работает следующимобразом.Штанга б посредством привода 11вместе с корпусом 1 вводится в от- ЗО...
Устройство для автоматического нагружения конструкций при испытаниях на прочность

Номер патента: 1504562
Опубликовано: 30.08.1989
Авторы: Азарин, Аристов, Дудник, Паценкер, Тимченко, Хильченко
МПК: G01N 3/32
Метки: испытаниях, конструкций, нагружения, прочность
...преобразователь 4 преобразуется в скорость изменения нагрузки на выходе гидравлического силовозбудителя. Процесс нагружения продолжается до тех пор, пока сигнал фактической нагрузки, иэмеренньп датчиком 6 усилия и нормирующим усилителем 7 не сравняется с сигналом заданной нагрузки. Введение в контур регулирования цепей, формирующих сигналы интегральной (посредством умно- жителя 9 и интегратора 12) и диффе" ренциальной (посредством умножителя 10 и дифференциатора 13) составляющих сигнала рассогласования, позволяет повысить точность воспроизведения нагрузок на конструкцию.Процесс настройки коэффициентов интегральной, дифференциальной и пропорциональной составляющих сигнала рассогласования в каждом канале нагружения...
Устройство для испытания блоков двигателей внутреннего сгорания

Номер патента: 538264
Опубликовано: 05.12.1976
МПК: G01M 13/00
Метки: блоков, внутреннего, двигателей, испытания, сгорания
...на передней части цилиндрического корпуса по ходу его движения и расположенным последовательно с уплотняющими элементами, и фиксирующими продольными направляющими, размещенными снаружи корпуса.На фиг, 1 изображено предлагаемое устройство в разрезе; на фиг. 2 - разрез по А-А на фиг, 1.Устройство содержит полый цилиндрический корпус 1, во внутренней полости которого размещена штанга 2 с роликами 3 и штифтами 4, В пазах 5 корпуса на осях 6 располо - жены поворотные рычаги 7, на которых укреплены уплотняющие элементы 8. На передней части 9 корпуса по ходу егэ движенияПодписное Тираж 1010 Филиал ППП "Патентф, г. Ужгород, ул, Проектная, 4 установлен нож 10, расположенный последовательно с уплотняющими элементами, а снаружи корпуса...
Способ определения критического усилия потери устойчивости элемента конструкции

Номер патента: 890131
Опубликовано: 15.12.1981
Автор: Ткаченко
МПК: G01N 3/08
Метки: конструкции, критического, потери, усилия, устойчивости, элемента
...формы образца су" дят по отклонению этой зависимостиот линейной.Способ осуществляют следующим образом.К элементу конструкции посредством клея или другим способом крепят пьезокерамические излучатель и приемник ультразвуковых колебаний. С помощью высокочастотного генератора и излучателя в одной части элемента возбуждают продольную или поверхност" ную волну, которую принимают в другой части элемента приемником. Затем постепенно нагружают элемент конструкции возрастающим усилием, реги" стрируют это усилие и изменение амплитуды ультразвукового сигнала. Изменение амплитуды ультразвукового сигнала связано с изменением усилия в элементе конструкции линейно и нелинейно связано с изменением (то есть искажением) формы элемента.Регистрацию...
Предыдущий патент: Пневматический регулятор
Следующий патент: Устройство для программного управления
Случайный патент: Аналого-цифровой преобразователь поразрядного уравновешивания