Способ коррекции эквидистанты в системах числового программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
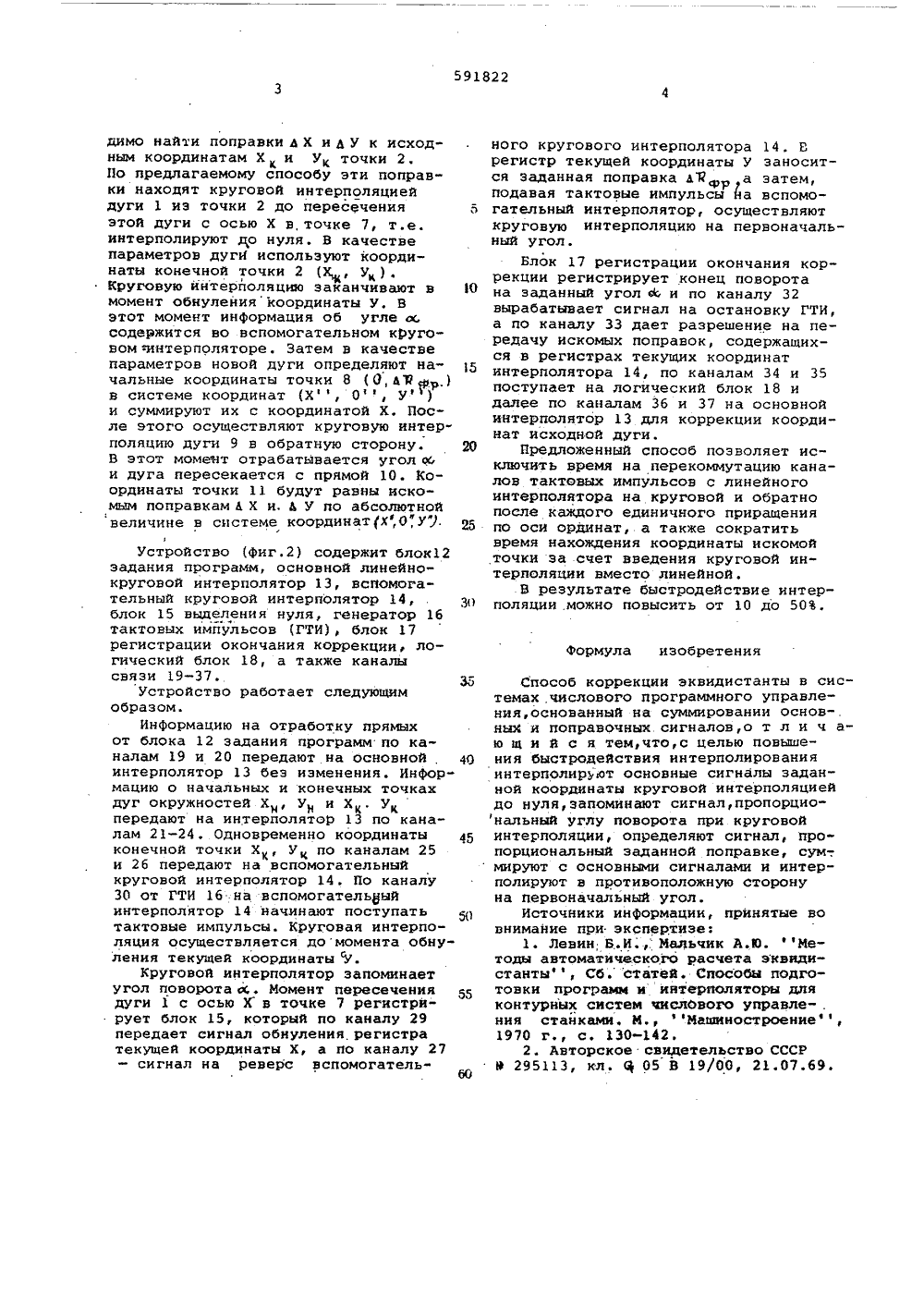
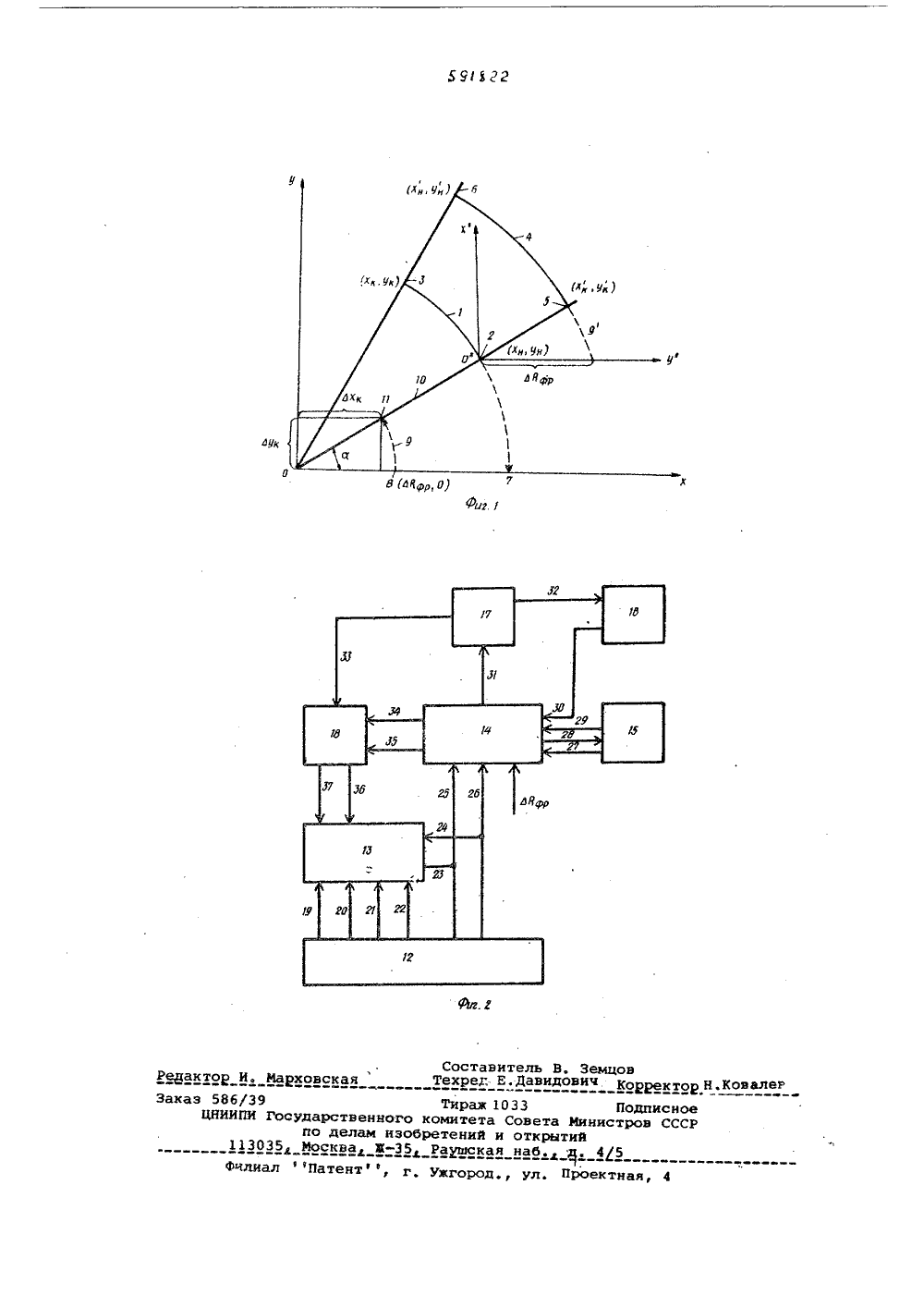
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 230974 (21) 2062045/18-24с присоединением заявки ЭЙ Союз Советских Социалистических Республик(11) 598 га"2--,51) М. Кл.05 В 19/00 Гоерааретоааыыо аоватот 6 ооо 1 а Маоаетров ШР ао а аав азооретовао а атнрчтао) Лата опубликовани писания 2301.7Кузьмин 54) СПОСОБ КОРРЕКЦИИ ЭКВИДИСТАНТЫ В СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ 10 1Изобретение относится к вычислительной технике и может найти применение в системах числового программного управления металлорежущими станками.Известен способ построения и коррекции эквидистанты с помощью основного линейно-кругового интерполятора и определении поправок к координатам дуг окружностей путем сложных вычислителей 11 .Однако для этого способа характерно низкое быстродействие, обусловлеиное необходимостью суммировать, делитель, возводить в квадрат и извлекать корень. 6Наиболее близким по технической сущности к изобретению является способ коррекции эквидистантьЕ, основанный на построении скорректированной эквидистанты с помощью основного ли- ЯО нейно-кругового интерполятора и определении поправок к координатам дуг окружностей с помощью вспомогательных линейного и кругового интерполяторов 121 .26Однако и для этого способа характерно сравнительно низкое быстродействие, вызванное поочередной работой вспомогательных линейного и кругово- го интерполвторов и связанным с этим 80 перекоммутацией выхода генератора тактовых импульсов и обнаружением приращений по оси ординат обоих вспомогательных интерполяторов.Целью изобретения является повышение быстродействия интерполирования.Для этого интерполируют основные сигналы заданной координаты круговой интерполяцией до нуля, запоминают сигнал, пропорциональный углу поворота при круговой интерполяции, определяют1сигнал, пропорциональный заданной поправке, суммируют с основными сигнала-ми и интерполируют в противоположную сторону на первоначальный угол.На фиг.1 графически иллюстрируется способ коррекции эквидистанты; на Фиг. 2 дана структурная схема устройства реализующего этот способ,Дуга исходной эквидистанты 1 (фиг.1) задается координатами начальной точки 2 (Х , Ун) и конечной точки 3 (Х, У) . Для обработки дуги скорректированной эквидистанты 4 необходимо найти начальные координаты точки 5 (Х, У) и конечной точки 6 (Х, У) уже скорректированной эквидистанты.Рассмотрим, например, нахождение координат точки 5. Для этого необходимо найти поправки ь Х и Ь У к исходным координатам Хи Ук точки 2. По предлагаемому способу эти поправки находят круговой интерполяцией дуги 1 иэ точки 2 до пересечения3 этой дуги с осью Х в, точке 7, т.е. интерполируют до нуля. В качестве параметров дуги используют координаты конечной точки 2 (Х , У). Круговую йнтерполяцию заканчивают в 1 О момент обнуления координаты У. В этот момент информация об угле х, содержится во вспомогательном круговом интерполяторе. Затем в качестве параметров новой дуги определяют на- )6 чальные координаты точки 8 (О,д% Р.) в системе координат (Х, 0, У ) и суммируют их с координатой Х. После этого осуществляют круговую интерполяцию дуги Э в обратную сторону. 20 В этот момент отрабатывается угол 4. и дуга пересекается с прямой 10. Координаты точки 11 будут равны искомыч поправкам д Х и, д У по абсолютной величине в системе координатХ,0",У 7.Устройство (Фиг.2) содержит блок 12 задания программ, основной линейно- круговой интерполятор 13, всиомогательный круговой интеРполятор 14, . 30 блок 15 выделения нуля, генератор 16 тактовых имйульсов (ГТИ), блок 17 регистрации окончания коррекции, логический блок 18, а также каналы связи 19-37.Устройство работает следующим образом.Информацию на отработку прямыхот блока 12 задания программ по каналам 19 и 20 передают на основной 40 интерполятор 13 беэ изменения. Инфор" мацию о начальных и конечных точках дуг окружностей Хн, УН и Х . У передают на интерйолятор 13 по каналам 21-24. Одновременно координаты конечной точки Хх, Ук по каналам 25 и 26 передают на вспомогательный круговой интерполятор 14. По каналу 30 от ГТИ 16.на вспомогательиый интерполятор 14 начинают поступать тактовые импульсы. Круговая интерполяция осуществляется домомента обнуления текущей координаты у.Круговой интерполятор запоминаетугол поворота х Момент пересечения дуги 1 с осью Х в точке 7 регистрирует блок 15, который по каналу 29 передает сигнал обнуления регистра текущей координаты Х, а по каналу 27- сигнал на реверс вспомогатель 60 ного кругового интерполятора 14. Е регистр текущей координаты у заносится заданная поправка д% а затем, подавая тактовые импульсы на вспомогательный интерполятор, осуществляют круговую интерполяцию на первоначальный угол.Блок 17 регистрации окончания корРекции регистрирует конец поворота на заданный угол А и по каналу 32 вырабатывает сигнал на остановку ГТИ, а по каналу 33 дает разрешение на передачу искомых поправок, содержащихся в регистрах текущих координат интерполятора 14, по каналам 34 и 35 поступает на логический блок 18 и далее по каналам 36 и 37 на основной интерполятор 13 для коррекции координат исходной дУги.Нредложенный способ позволяет исключить время на перекоммутацию каналов тактовых импульсов с линейного интерполятора на круговой и обратно после каждого единичного приращения по оси ординат, а также сократить время нахождения координаты искомой точки за счет введения круговой интерполяции вместо линейной.Б результате быстродействие интерполяции .можно повысить от 10 до 50,формула изобретенияСпособ коррекции эквидистанты в системах, числового программного управления,основанный на суммировании основ-. ных и поправочных сигналов,о т л и ч аю щ и и с я тем,что,с целью повышения быстродействия интерполирования интврполир 1 0 т основные сигналы заданной координаты круговой интерполяцией до нуля, запоминают сигнал,пропорциональный углу поворота при круговой интерполяции, определяют сигнал, пропорциональный заданной поправке, сум-, мируют с основными сигналами и интер- полируют в противоположную сторону на первоначальный угол.Источники информации, принятые во внимание при экспертизе:1, Левин; В,И , Мальчик А.Ю. Методы автоматического расчета эквидистанты, Сб. статей. Способы подготовки программ и интерполяторы для контурных систем числОвого управле- . ния стайками, М., Машиностроение, 1970 г., с. 130-142.2. Авторское свидетельство СССР295113, кл. Я 05 В 19/00, 21.07.69.Состав ехред ал Патент , г. ужгород ул. Про в у В Ф я,едактор И. Иарховска Заказ 586/39 ЦНИИПИ Государств по дел 113035 д Москва. Давидович Корректор н. К033 ПодписноеСовета Министров СССРоткрытийнаб.45 Тираж нного комитета ам изобретений йРаушска
СмотретьЗаявка
2062045, 23.09.1974
ПРЕДПРИЯТИЕ ПЯ А-3890, МОСКОВСКИЙ ОРДЕНА ЛЕНИНА ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ДАНЧЕЕВ ВЛАДИСЛАВ ПАВЛОВИЧ, ЕРМАКОВ НИКОЛАЙ СЕМЕНОВИЧ, КУЗЬМИН ГЕННАДИЙ ЯКОВЛЕВИЧ, СМИРНОВ НИКОЛАЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/4103
Метки: коррекции, программного, системах, числового, эквидистанты
Опубликовано: 05.02.1978
Код ссылки
<a href="https://patents.su/3-591822-sposob-korrekcii-ehkvidistanty-v-sistemakh-chislovogo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции эквидистанты в системах числового программного управления</a>
Устройство для коррекции базовой линии хроматографического сигнала

Номер патента: 1322323
Опубликовано: 07.07.1987
Авторы: Аминов, Насыров, Рассказова
МПК: G06G 7/18
Метки: базовой, коррекции, линии, сигнала, хроматографического
...заданным порогом ЬВыходная частота управляемого делителя 16 частоты подсчитывается по формуле б,ЛК;1НИ Ггр(К 1 Н(це ниц иИ(Н( -нли гтлр(ну плццжсция чунс твитльногти июУлг дми мчи тд ция р(рг и - цлгл с ч( тчикд, сл;сржил с р игтрд .3 (днид( ггл елснл 1 тл г(т 1 гт.ТВУ ет плсге(едтс.Е,цлю умнжс Еню цд 2. Л 1 д:1(11 чцл при псре.нчснИ 1 псц;111д п (1 эц (и 1( т л р и у и л Р ьпс и и я ч у ес тнита 1,1 с ги илНу.сд с шц сложения рен ргин 11 гл счетчика блскд 1 масштабирования годержимос регистра 23с д 1 и Г д ( т Г я и г д и ч тГт н е т Г т В у е тплг нс;(ндтсл 1 нлл 1 дс лцин нд 2 . ти -ю, илпух 1,( дю, и т., пдюпэ 1 ми цанх, д 1:дрдлцс ни дпиги счетчика 22,с л;( римс рс гистрд 3 эдпигВдетгяс иИк 22, Таким лбрдэмгуществляется упрдвл...
Устройство преобразования координат для геометрической коррекции изображений

Номер патента: 1332314
Опубликовано: 23.08.1987
Авторы: Александров, Волонцевич, Глотов, Трифонов
МПК: G06F 7/548, G06T 3/60
Метки: геометрической, изображений, координат, коррекции, преобразования
...изображенияв счетчиках 5 и 6 хранятся преобразованные координаты Х и У предыдущегоэлемента первые члены соответственно первого и второго уравнений систем (2.1) и (2.2 Ц .В течение первого. такта, еслиизменяется координата Х и У, импульсчерез элемент ИЛИ 7(8) поступает насчетчик 5(6) 1 третий член первого(2.2 Ц,В течение второго такта, если изменяются координаты Х и У, импульспоступает на счетные входы делителейи 4 (2 и 3).Импульсы со счетных входов делителей проходят на их выходы, когда соответствующая координата представленная числом импульсов будет крат 1ной коэффициенту деления 2 М дляделителей 1 и 2 и М для делителей 3и 4. Таким образом, импульс на выходеделителя 1, например, означает изменение на единицу целой части величины...
Способ дистанционного определения координат точки на плоскости

Номер патента: 102868
Опубликовано: 01.01.1956
Автор: Ильин
МПК: H04N 3/32
Метки: дистанционного, координат, плоскости, точки
...(1) свет попадает с передаваемого изображенпя через узкуго горизонтальную щель, что соответствует горизонтальной строке. дта ц 1 ель движется в вертпкальном направленпп с постоянной скоростью (кадровая развертка) до момента пересеченпя определяемой точки. В момент пергссченпя усиленный Фототок от определяемой точки одновременно подается на генераторы (3) и (1), вызывая генерпрованпе импульса остановки прпвода кадровоп рбзверткп п пмпульса, посылаемого в линию.П 1 п 1 вод (6) останавливает кадровую развертку на определенный интервал времени, достаточный для разверткп строки. На еотоэлемснт (6) строчной развертки свет попадает, проходя последовательно чсрсз две щслп - указанную выше горпзонтальнуго и вертикальную щель строчМ 02868...
Устройство для определения координаты точки затвердения нити

Номер патента: 521517
Опубликовано: 15.07.1976
Авторы: Горшенев, Кузьмин, Шалыгина, Яковченко
МПК: G01N 33/36
Метки: затвердения, координаты, нити, точки
...ниваются между собой. Суммарный сигнал рассогласования, пропорциональный времени (Т - С - АГ), поступает на иопоннительный механизм 9, перемещающий датчики вдоль нити до тех пор, пока сум марнъпй сигнал рассогласования не станет равным нулю, Жестко связанная с датчиками стрелка 10 непрерывно показывает на шкале 11 положение (координату) точки затвердевания. 30 4Таким образом, если точка затвердевши. ния находится выше датчиков, исполнительный механизм перемещает датчики по направлению к фильере за счет предваритель ного рассогласования ЬГ, если точка затвердевания находится ниже датчиков, иопопнительный механизм перемещает датчики по направлению от фильеры за счет превышения разности сигналов 3 - 3 над предварительным...
Устройство для коррекции информации в блоке постоянной памяти

Номер патента: 752501
Опубликовано: 30.07.1980
Авторы: Каткова, Мхатришвили, Фокин
МПК: G11C 29/00
Метки: блоке, информации, коррекции, памяти, постоянной
...такжекоммутатор 7, дополнительный элемент 8ИЛИ и элементы 9 ИЛИ,нами и выходами первого блока 1 памяти, а выходы - соответственно со входами элементов 9 ИЛИ, выходы которыхподключены к выходам устройства, Комму 7 атор 7 содержит (фиг, 2) дешифратор12 и элементы 13 И-ИЛИ-НЕ. Здесь изображен также выходной регистр 14 блока 3 памяти.Вход дешифратора 12 является входом коммутатора 7 и подключен к адресным шинам второй группы, а выходы дешифратора соединены соответственно содними из входов каждого элемента 13И-ИЛИ-НЕ, к другим входам которых подключены выходы выходного регистра 14блока 3 памяти.Устройство работает слецующим образом,Работа устройства рассматривается напримере коррекции информации блока постоянной памяти объемом 2...
Предыдущий патент: Система автоматического управления
Следующий патент: Устройство для ввода программы
Случайный патент: Способ изготовления пленочных термочувствительных сопротивленийвсесоюзнаяп»тт. г •i-vff5trtfая; i i i. h 1 nuдепг slvjmfjбиблиотека