Способ управления дифференциальной следящей системой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 546848
Авторы: Винниченко, Новоселов
Текст
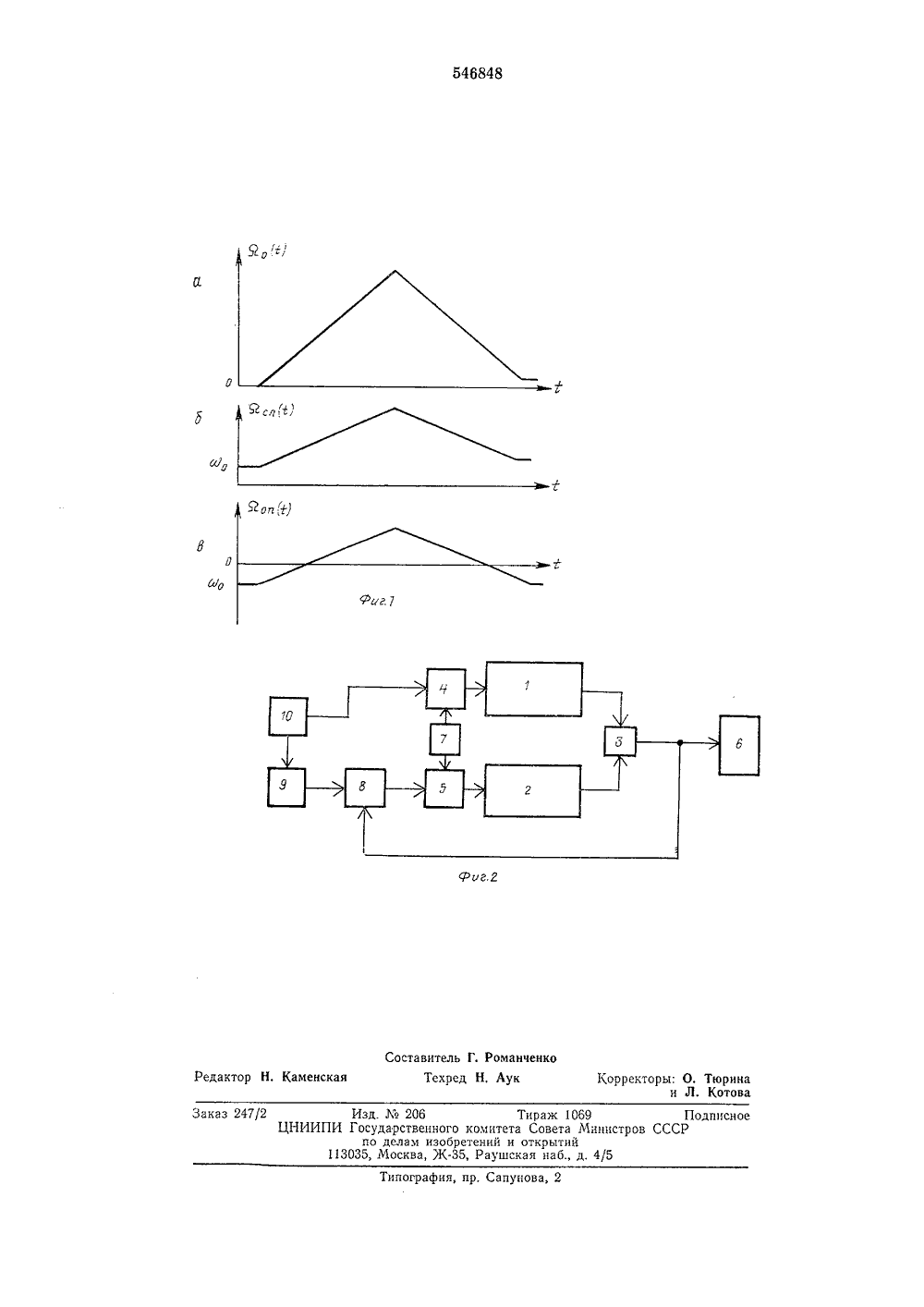
О П И С А Н И Е нц 546848ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических(53) УДК 62-50(088.8) по делам нзабретеннй и открытий(54) СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНОЙ СЛЕДЯЩЕЙ СИСТЕМОЙавленияодном фор- порцио- ускоремируют о канаавлены временные оростей дпфференопорного и следя - структурная схем шей системы, реа,Известна дифференциальная система, содержащая следящий и опорный каналы, соединенные с выходом системы через сумматор.В такой системе постоянное значение выходного сигнала обеспечивается при ненулевой, так называемой опорной скорости движения на выходах опорного и следящего каналов, задаваемой источником опорных сигналов, а изменение состояния на выходе системы производится за счет изменения величин скорости движения, создаваемой следящим каналом 1Известен также способ управления дифференциальной следящей системой, заключающийся в формировании управляющего воздействия, пропорционального алгебраической сумме управляющих сигналов следящего и опорного каналов; при этом осуществляется ступенчатое изменение величины скорости движения на выходе опорного канала при необходимости увеличения скорости движения на выходе системы сверх максимальной разности скоростей движения каналов при исходной опорной скорости 2.Такая необходимость возникает, в частности, при выполнении следящей системой наведения объекта регулирования в заданную точку за заданное время с обеспечением в ней заданной скорости дальнейшего движения.Недостатком указанного способа является невысокая точность системы в моменты пеключения скоростей.С целью повышения точности упрдифференциальной следящей системовременно с управляющим воздействиемируют дополнительньш сигнал, прональный половине текущего значенияния движения объекта системы и сумего с управляющим сигналом опорног ла.На фиг. 1 предст диаграммы изменения ск циальной следящей системы, щего каналов; на фиг. 2 а дифференциальной следя чизуюшей данньш способ.На фиг, 1 приняты следующие обозначения:0,(1) - скорость движения на выходе следящей системы;Осл(1) - скорость движения на выходе следящего каналаЙоп(1) - скорость движения на выходе опорного канала;к, - величина опорной скорости, т. с, скорости на выходах каналов в исходном состоянии.В исходном состоянии на выходах следящего и опорного каналов сформирована и поддерживается постоянной скорость движения, равная о,; при этом в результате суммирова5 10 15 20 25 зо 35 4 О 45 ния скорость движения на выходе дифференциальной следящей системы равна нулю,При необходимости выполнения наведения объекта регулирования на входе следящей системы формируется необходимое управляющее воздействие, скорость изменения которого, например, может иметь вид, показанный на фиг. 1,а. По предлагаемому способу одновременно с тем, как следящий канал, на вход которого поступает это воздействие, отрабатывает его, на входе опорного канала формируют дополнительный сигнал, пропорциональный половине текущего значения ускорения движения. При этом скорость движения на выходе опорного канала изменяется так, как это показано на фиг. 1,в, и в результате этого снижается величина скорости движения на выходе следящего канала, отрабатывающего вторую половину текущего значения ускорения движения.При этом в том случае, когда знак требуемой скорости движения при выполнении наведения объекта не совпадает со знаком опорной скорости на выходе опорного канала его скорость может изменить свой знак, принимая к моменту окончания наведения исходное значение о,; если же знаки этих скоростей совпадают, то происходит изменение направления скорости движения, создаваемой следящим каналом.Структурная схема дифференциальной следящей системы, работающей по предлагаемому способу показана на фиг. 2.Эта система состоит из опорного канала 1, следящего канала 2, сумматоров 3, 4 и 5, объекта регулирования 6, источника опорных сигналов 7, чувствительного элемента 8, задатчика входных воздействий 9 и устройства для формирования управляющих воздействий 10. Выходы опорного 1 и следящего 2 каналов через сумматор 3 соединены с объектом регулирования 6.Вход опорного канала 1 через сумматор 4 соединен с первым выходом источника опорных сигналов 7, сигнал на котором пропорционален опорной скорости.Вход следящего канала 2 соединен последовательно с сумматором 5, чувствительным элементом 8 и задатчиком входных воздействий 9. Второй вход сумматора 5 соединен со вторым выходом источника опорных сигналов 7, сигнал на котором противоположен по знаку сигналу на первом выходе.Второй вход чувствительного элемента 8 соединен с выходом сумматора 3, являющимся выходом дифференциальной следящей системы.Устройство для формирования управляющих воздействий при наведении при переходе в режим наведения формирует управляющее воздействие и выдает его на вход задатчика входных воздействий 9. Одновременно, с целью реализации описанного способа управления дифференциальной следящей системой, устройство 10 формирует управляющее воздействие на входе опорного канала 1, для чего второй вход сумматора 4 соединен с вторым выходом устройства 10. В результате этого скорость движения на выходе опорного канала при наведении плавно изменяет свою величину таким образом, чтобы обеспечить в объекте регулирования требуемый закон движения.В результате применения описанного способа управления дифференциальной следящей системой повышается точность отработки управляющих воздействий при наведении. Формула изобретенияСпособ управления дифференциальной следящей системой, заключающийся в формировании управляющего воздействия, пропорционального алгебраической сумме управляющих сигналов опорного и следящего каналов, о тл и ч а ю щ и й с я тем, что, с целью повышения точности управления, одновременно с управляющим воздействием формируют дополнительный сигнал, пропорциональный половине текущего значения ускорения движения объекта системы и суммируют его с управляющим сигналом опорного канала.Источники информации, принятые во внимание при экспертизе:1. Журнал Электричество, М 6, 1968 г, статья Б. М. Школьникова, И. И. Суда Некоторые свойства и расчет многодвигательного привода с механическим дифференциалом.2, Авторское свидетельство СССР М 416659 М, Кл. 6 05 В 11/00, 1971 г. (прототип).546848 фи Заказ 247/2 Изд. Ла 206 Т ЦНИИПИ Государственного комитета по делам изобретений и 113035, Москва, Ж, Раушск
СмотретьЗаявка
1976071, 10.12.1973
ПРЕДПРИЯТИЕ ПЯ А-1658
ВИННИЧЕНКО ВЛАДИМИР МИХАЙЛОВИЧ, НОВОСЕЛОВ БОРИС ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: дифференциальной, системой, следящей
Опубликовано: 15.02.1977
Код ссылки
<a href="https://patents.su/3-546848-sposob-upravleniya-differencialnojj-sledyashhejj-sistemojj.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления дифференциальной следящей системой</a>
Дифференциальная следящая система
Номер патента: 732801
Опубликовано: 05.05.1980
Автор: Винниченко
МПК: G05B 11/01
Метки: дифференциальная, следящая
...2 регулирования своего максимального значения и при дальнейшем росте скорости входного воздействия (момент времени т,) на фиг, 2) сигнал на выходе сумматора 12 становится отличным от нуля. Тогда при необходимости обеспечения скорости движения объекта 8 выше максимальной разности скорос. тей опорного и основного каналов 1, 2 регу. пирования формирователь 14 корректирующего сигнала в зависимости от выходного сигнала сумматора 12 формирует корректирующий сигнал таким образом, что, поступая на вход сумматора 10, этот сигнал изменяет скорость опорного канала 1 регулирования, увеличивая тем самым, разность скоростей движения, создаваемых опорным и следящим каналами 1, 2, до требуемой величины.В момент времени та (фиг. 2) скорость движения,...
Система синхронизации движения опорных тележек

Номер патента: 1209110
Опубликовано: 07.02.1986
Авторы: Ерохин, Митрюхин, Пономарев
МПК: A01G 25/09
Метки: движения, опорных, синхронизации, тележек
...Опирц 1; тс,цжс к рдиГ;3 т сле. 01 ци Образм.1 р 3 1 ь:ОсГд,ии Опорной телкки изме 35 ст(51 ) 1 Г чс)клч п рог ет)3)3 и 20 и 21, сслццсппьчц Парсвым соединением 22, ры- И Г 1 у чрсП 1 др)игн к) гг 1 ,кч (8 10 Врдчц )дст шлку 17 и рычаг 4 мсчбранпсго поцоротцогнасоса 1, например, по часовой сгрслкс. Тога мембраной 3 Вода Вытесня(Гс 5 Из полОсти 6 В мембранный г 3,рслв)(гдтс 3 ь 8. Мембрана 24 1)сремспсдст итск 26 В.с во, ся(33 ч)153 прчкицу 28.Б тжс В;, смя вода из мемсрацного ГЛГ)0,ВИГ(3 ГСГ 5)ПОЛ ЛСИСГВИСм 1 р)КИ 131 э, 2срс)ешс)кадей мсмбрц) 23 Вчсстс с ПТКО)1 О В 3(ВО ВЫТЕСЦЯС С 5 и ПОЛОСТЬ О мсчбрдцц 0 Воротного насоса. Олповтс)СИИ,1 я Восполнецп 53 чтс 1 ск лд из рсзсрвчдрд 1 пс) нитки через Обр)3) цый кд:дц 4 посту ает В полость...
Вычислительная система для решения дифференциальных уравнений
Номер патента: 565299
Опубликовано: 15.07.1977
Авторы: Сулим, Танкелевич
МПК: G06F 17/13
Метки: вычислительная, дифференциальных, решения, уравнений
...чтения 6, ключи 7, 8, узел,связи 9. В состав системы входят также устройство управления 10 с управляюгцимн выходами 11 - 14,устройство ввода-,вывода 15, коммутаторы16, - 16,Устройство управления (см, фиг. 2) содержит генератор тактовых импульсов 17 счетч лк 18, запоминающий блок 19, дешифратор 20, запоминающий блок 21, информацион.ный регистр 22.Микропроцессор 3 н запоминающее устройство 4 обмениваются информацией по двусторонней информационной шине, адрес ячейки запоминающего устройства передается поадресной связи, состояние записи-чтения -по связи управления чтением-залисью. Сдругой стороны, сипналы записи-чтения мо.гут поступать с выходов 14 и 11 успройствауправления 10, а адрес - из узла 9 овязи,Информационные выходы...
Вычислительная система для решения дифференциальных уравнений
Номер патента: 620980
Опубликовано: 25.08.1978
Авторы: Сулим, Танкелевич
МПК: G06F 15/32
Метки: вычислительная, дифференциальных, решения, уравнений
...параллельно,Система содержит решающие блоки1 -1, информационные связи 2 -2,каждая из которых содержит число линий55 по количеству двоичных разрядов в чис пе; коммутаторы 3 "ЗК, соединенные с информационной шиной 4, устройство ввода-вывода 5, устройство управлении 6 с выходами 7-11; каждый решающий бпок.60содержит микропроцессор 12, запоминающее устройство 13, группы элементовИЛИ 14, 15.Запоминающее устройство условно разделено на две части: информационноеполе, одинаково устроенное во всех решающих блоках и содержащее выходные переменные всех решающих блоков, и программную часть, содержащую программыработы, специфические дпя каждого решающего блока, 10Схема управления содержит генератортактовых импульсов 16, счетчик 17,...
Устройство контроля следящей системы передачи угла

Номер патента: 651398
Опубликовано: 05.03.1979
МПК: G08C 25/00
Метки: передачи, системы, следящей, угла
...равными;Рв=6 -Ьрс с1 деро - коэффициент электрическойредукции приемника проверяемой следящей системы;И - коэффициент электрическойредукции параметрического датчика.Предложенное устройство работаетследуюишм образом.Синхронный двигатель 4 вращает модулятор 3 со скоростью п А и через редуктор 5 с передаточным отнощением- вал двухполюсного датчика 15 со скор стью И 1. Сигнал, снимве% мый с датчика 15, сравнивается с сигналом многополюсного приемника 13 Результат сравнения складывается на сумматоре 17 с постоянным по амплитуде н фазе напряжением, поступающим от источника 18 напряжения несущей частоты через регулятор 19. Сигнал, снимаемый с сумматора 17, обрабаты вается приводом следящей системы, состоящим из усилителя 20...
Предыдущий патент: Амплитудный анализатор
Следующий патент: Устройство для управления процессом загрузки расходных емкостей
Случайный патент: Заборник маслобака силовой установки летательного аппарата