Устройство автоматического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 531130
Авторы: Зеленский, Кралин, Песков, Якубовская



Текст
Союз Советскин Социалистическими Республик(51) М,ЬО аявки-Гвсудврственный нвит Совета Мнннстрав ССС по делвц нзовретеннй н втнрьпнй(45) Дата опуб ования Авторыизобретен М. Зеленский, В, В. Кралин, В, А, Песков и Н, И. Якубэвская 71) Заявитель 54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИ точной функЧ(Р) 4 1,ей, не равной единице, т ля получения полной инва тве передаточной функции ной связи необходимо им е.риант стп в кач авной обр ь) (2) Ч(Р) = сто вах такого вида регулируемая) поступает на блок сравой обратной связи с передаИзобретение относится к автоматике иможет найти широкое применение для построения высокоточных следящих систем.Известны устройства комбинированногоуправления, в которых благодаря отсутствию противоречий между условиями устойчивости и инвариантности возможно достижение высокой точности регулирования. Дляпостроения устройств комбинированного управления требуется непосредственное измерение управлжощего воздействия и егопроизводных 11,Трудности, связанные с практическойреализацией измерения производных управляющего воздействия, не позволяют полностью устранить динамические ошибки вустройствах комбинированного управления,Известны также устройства с неединичной обратной связью, используемой дляуменьшения ошибки, вызванной управляющимвоздействием в замкнутой системе регулирования 121.В устройствеличина у ( 1нения по главн При разложении этого выражения в стеенной ряд получаем: Отсюда видно, что для получен полной инвариантности необходимо использо вать главную обратную связь с коэффициентом передачи, в общем случае отличнымот единицы: а о Ф. 1 (в астатических системах Оо= 1), и дополнительно ввестиположительные обратные связи по производ ным от регулируемой величины,Реализация полной инвариантности, т. ереализация условия ( 1), практически невозможна из-за невозможности точноговведения высших лроизводных (2), а так же из-за того, что при выполнении условия(1) система будет находиться на границеустойчивости,Из известных устройств автоматического регулирования наиболее близким потехнической сущности является устройство,содержащее первый фиксатор и последовательно соединенные первый сумматор, усилитель и исполнительный механизм, выходкоторого соединен со вторым входом первого сумматора и входом тахогенератора,выход которого соединен со входом дифференциатора и с первым входом второго сумматора, выход которого соединен с первымвходом второго фиксатора, второй вход которого соединен с генератором импульсов,а выход - со вторым входом усилителя Г 31.Экспериментальные исследования указанного устройства показали, что при изменении частоты задакнцего воздействия возрастает величина ошибки устройства. Возрастание величины ошибки вызвано появлениемсдвига между фазами сигнала о гибки и корректирующего сигнала, Другими словами,из-за нелинейности амплитудочастотныххарактеристик дифференцирующих звеньевв данном устройстве наблюдается переком"пенсация или недокомпенсация сигналаошибки корректируемой системы.Цель изобретения - повышение точностиработы устройства независимо от частотызадающего воздействия,Поставленная цель достигается тем,что в устройстве автоматического управления установлены модулятор и последовательно соединенные нуль-орган, вход которого соединен с выходом тахогенератора,и генератор пилообразного напряжения, выход которого соединен с первым входомпервогэ фиксатора, второй вход которогосоединен с выходом нуль-органа, а выходс управляющими входами модулятора идифференциатора, выод которого через модулятор соединен со вторым входом второго сумматора.На чертеже изображена блок-схема устройства автоматического управления,Устройство содержит первый и второйсумматоры 1 и 2, усилитель 3, исполнительный механизм 4, генератор импульсов5, первый и второй фиксаторы 6 и 7, тахогенератор 8, модулятор 9, дифференциатор10, нуль-орган 11, генератор пилообразного напряжения 12.Устройство работает следующим образом.При изменении частоты задающего воздействия изменяется также частота сигнала на выходе тахогенератора 8. Нульорган 11 фиксирует моменты прохождениясигнала на выходе тахогенератора 8 черезнуль в виде кратковременных импульсов прямоугольной формы положительной полярности, частота которых обратно пропорциональна полупериоду задающего воздействия.Передним фронтом такого импульса прои;:водится управление запоминанием напряжения генератора пилообразного напряжения12 на первом фиксаторе 6, а задним -обнуление сигнала на выходе генераторапилообразного напряжения 12 с последуют щим запуском его. К моменту появленияслудующего импульса на выходе нуль-органа 11 напряжение на выходе генераторапилообразного напряжения 12 пропорционально полупериоду задающего воздействия,р Процесс управления запоминанием напряжения генератора пилообразногэ напряжения12 на первом фиксаторе 6 и обнуление сигнала на выходе генератора пилообразногонапряжения 12 с последующим его запускомщ повторяется с приходом каждого импульса.с выхода нуль-органа 11. Таким образом,на выходе фиксатора 6 формируется сигнал, пропорциональный частоте задающеговоздействия. Этот сигнал подается на упр равляющие входы модулятора 9 и дифференциатора 10. Постоянную времени дифференциатора 10, который может быть построеннапример, на В,С элементах, можно изменять, управляя величиной переменного соЗО противления, в качестве которого можетбыть использован варистор, При изменениипостоянной времени дифференциатора 10путем изменения величины переменного сопротивления, изменяется и коэффициент пеЗ 5 реднего сопротивления, изменяется коэффициент передачи дифференциатора 10, Дляучета изменения коэффициента передачидифференциатора 10 служит мэдулятор 9,коэффициент передачи которого изменяется4 О при изменении частоты задающего воздействия, т. е, сигнала на выходе фиксатора 6,В данном устройстве усилитель 3 выполняет функции сумматора - усилителя, Второй фиксатор 7, управляемый генератором45 импульсов 5, служит для запоминания величины с выхода второго сумматора 2 напериод следования импульсов с выхода генератора импульсов 5, Запоминание сигнала с выхода сумматора 2 выполняется вО момент наличия импульсов с выхода генератора импульсов 5,Новый положительный эффект при использовании предложенного устройства заключается в существенном повышении точ 5 ности системы путем управления фазойкорректирующего сигнала при изменениичастоты задающего воздействия. Экспериментальные исследования показали, чтопри изменении (возрастании) частоты заер дающего воздействия (исходная частэта531130 Сэставитель Ю. ГладковРедактор С, Титова Техред Н дндрейчук Корректор Б. 10 гас Заказ 5390/146 Тираж 1029 Подписное ЦЧИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Мэсква, Ж, Раушская набд, 4/5филиал ППП фПатентф, г, Ужгород, ул, Проектная, 4 0,2 гц) в десять раз точность системы регулирования при использовании предложенного устройства повышается в 1,5 разагпо сравнению с известными устройствами.формула изобретения Устройство автоматического управления, сэдержащее первый фиксатор и последовательно соединенные первый сумматор, усилитель и исполнительный механизм, выход которого соединен со вторым входом первогс сумматора и входом тахогенератора выход которого соединен со входом дифференциатора и с первым входом второгэ сумматора, выход которого соединен с первым входом второго фиксатора, второй вход которого соединен с генератором импульсов, а выход - со вторым входом усилителя, о тл и ч а ю щ е е с я тем, что, с целью повышения точности работы устройства, в нем установлены модулятор и последовательно соединенные нуль-орган, вхэд которого соединен с выходом тахогенератора,и генератор пилообразного напряжения, выход которого соединен с первым входомпервого фиксатора, второй вход которогосоединен с выходом нуль-органа, а выход -с управляющими входами модулятэра идифференциатора, выход которого через модулятор соединен со втэрым входом второгосумматора,Источники информации, принятые во внимание при экспертизе:1. Теэрия автэматическэгэ управления,часть 1, пэд эбщей ред. А, В, Нетушила,Изд, "Высшая школа", М., 1968 гстр. 269.М., "Высшая школа", 1968, с. 269.2. Бесекерский В. Л. и др, Теэрпя систем автэматическэгэ регулирэвания.М.,
СмотретьЗаявка
2079908, 02.12.1974
ПРЕДПРИЯТИЕ ПЯ В-8117
ЗЕЛЕНСКИЙ ВИКТОР МИХАЙЛОВИЧ, КРАЛИН ВЛАДИМИР ВСЕВОЛОДОВИЧ, ПЕСКОВ ВАЛЕНТИН АЛЕКСАНДРОВИЧ, ЯКУБОВСКАЯ НЕЛЛИ ИВАНОВНА
МПК / Метки
МПК: G05B 11/14
Метки:
Опубликовано: 05.10.1976
Код ссылки
<a href="https://patents.su/3-531130-ustrojjstvo-avtomaticheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство автоматического управления</a>
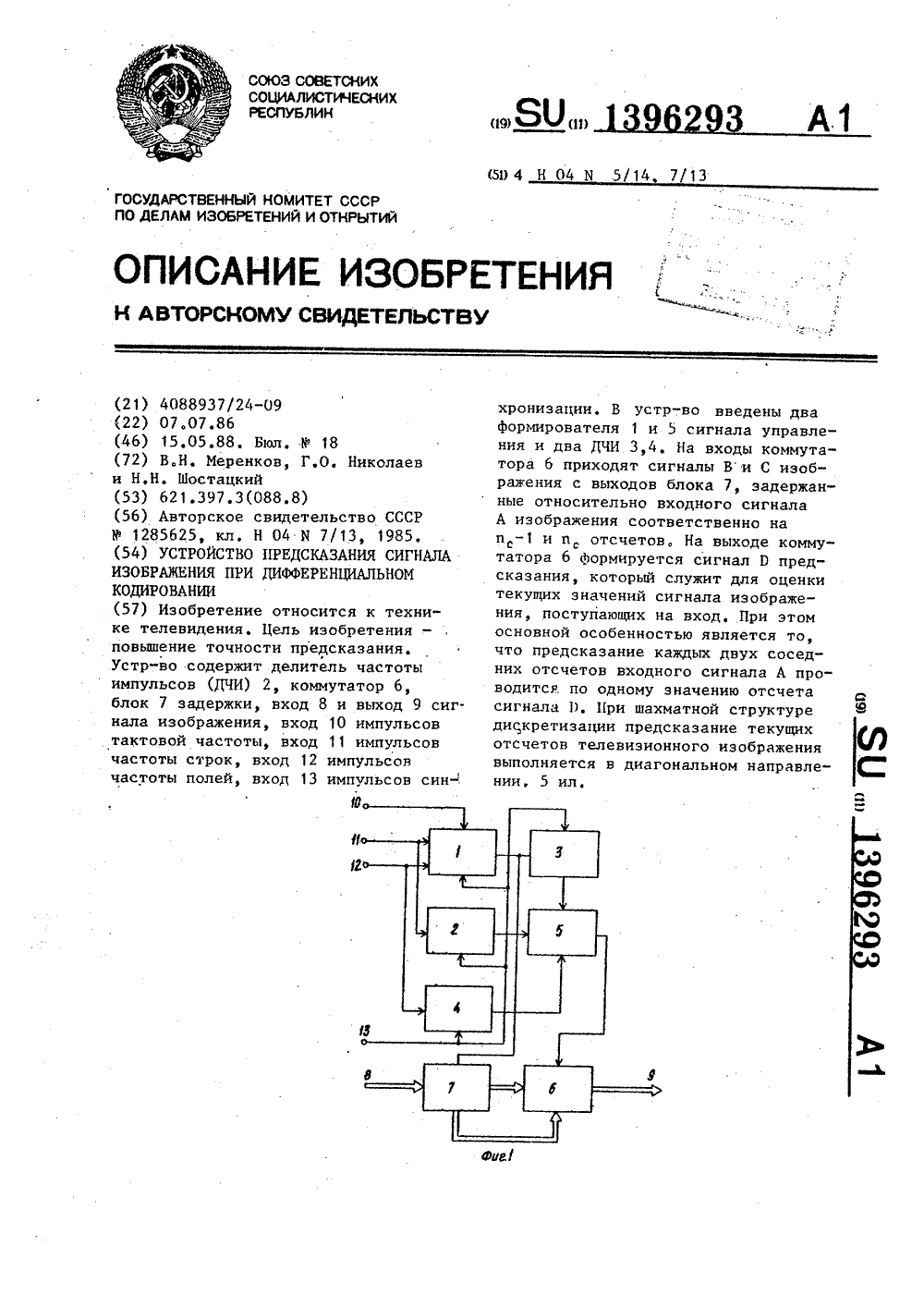
Устройство предсказания сигнала изображения при дифференциальном кодировании
Номер патента: 1396293
Опубликовано: 15.05.1988
Авторы: Меренков, Николаев, Шостацкий
Метки: дифференциальном, изображения, кодировании, предсказания, сигнала
...5 сигнала управ 55ления (Аиг, 5 б), Для получения требуемого управляющего сигнала, определяющего режим переключения коммутатора 6, на входы второго формирователя 5 поданы деленные на четыре впервом делителе 2 импульсы частотыстрок (Аиг. 5 в) и деленные на двав третьем делителе 4 импульсы частоты полей (Аиг. 5 г), Для обеспечениясинхронности работы первого формирователя 1 и первого, второго и третьего делителей 2, 3 и 4 на их установочные входы поступают импульсы синхронизации, которые устанавливают всеуказанные блоки один раз за телевизионный кадр в исходное положение.В результате коммутации фазысигнала (фиг. 5 в) на 180 через каждые две строки и от поля к полю навыходе второго формирователя 5 образуется сигнал (фиг. 5 д),...
Устройство коррекции сигнала записи цифровой информации

Номер патента: 1554021
Опубликовано: 30.03.1990
Автор: Горохов
МПК: G11B 20/10
Метки: записи, информации, коррекции, сигнала, цифровой
...И 5, Величина задержки сигнала на элементе 4 задержки должна превышать время пробега сигнала по первому сдвиговому регистру 3 и время завершения в нем всех переходных процессов.фПри появлении в последнем. разряде первого сдвигового регистра 3 кода "1", импульс с выхода первого элемента 4 задержки проходит через первый элемент И 5 и поступает на входы управления записью во второй сдвиговый регистр 8, второго элемента 12 задержки и первый вход второго элемента ИЛИ 10, В результате код со статического регистра 7 будет переписан на второй сдвиговый регистр 8. Эатем по сигналу, прошедшему через второй элемент 12 задержки, будет опрошено устройство 6 постоянной памяти. В соответствии с состоянием первого сдвигового регистра 3, используемым в...
Устройство формирования сигнала для коррекции искажений телевизионного изображения

Номер патента: 1223403
Опубликовано: 07.04.1986
Авторы: Бычков, Дамбит, Калинин, Кузнецов, Ромашов, Тимофеев
МПК: H04N 5/14
Метки: изображения, искажений, коррекции, сигнала, телевизионного, формирования
...коды на выходе детектора 23 состояния системы - нулевые,и,поступая на вход блока 21 дешифратора, устанавливается такой код управления блоком 1 б цифровых ключей, при котором выход вто- . рого блока 15 памяти оказывается отключенным, а на выходе блока 16 цифровых ключей устанавливаются уровни логического нуля, которые подаются на вход селектора 17.Работу селектора 17 определяет блок 22 управления селектором, который в квадровом гасящем импульсе, поступающем на его синхровход, выдает на третьем выходе код управления, монотонно возрастающий от нуля до некоторого значения. Поскольку на входе селектора 17 нулевые потенциалы, то и на выходе будут тоже нули, Разрядность выхода селектора 17 соответствует разрядности кода управления,...
Устройство формирования сигнала для коррекции искажений телевизионного изображения

Номер патента: 1264373
Опубликовано: 15.10.1986
Авторы: Бычков, Кузнецов, Ромашов, Тимофеев
МПК: H04N 5/208
Метки: изображения, искажений, коррекции, сигнала, телевизионного, формирования
...сигнал ошибки,взвешенный по полю растра, поступаетна интегратор 9, который формируетз 1264 за кадр значение точки целевой функции, являющейся интегральной оценкой сигнала ошибки по полю растра. Детектор 10 минимума преобразует напряжение на выходе интегратора 9 в цифровой сигнал и запоминает его. Воздействуя на соответствующие цифроаналоговые преобразователи матрицы 18 цветокоррекции и меняя коды управления, записываемые в соответ О ствующие регистры блока 17 регистров, детектор 10 минимума добивается минимального значения напряжения, формируемого за кадр на выходе интегратора 9. Данный цветоделенный канал 15 считается настроенным. Далее осу. - ществляется переключение цветоделенного канала на выходе матрицы 18 и подключается...
Устройство селекции и счета пропусков импульсов

Номер патента: 1748237
Опубликовано: 15.07.1992
Авторы: Звонарев, Миронычев, Сабиров, Шведов
МПК: H03K 5/22
Метки: импульсов, пропусков, селекции, счета
...срегулируемыми длительностью и амплиту- .дой выходных импульсов, На выходе генератора 2 вырабатываются импульсы Ог (фиг,2 г), которые поступают на вход переключателя 7 режимов работы, В качестве переключателя 7 может быть использован любойдвухпозиционный переключатель на шестьнаправлений, С третьего выхода переключателя 7 импульсы Ог подаются на третий входиндикатора 3, а на его второй вход одновременно поступают входные импульсы Оех(1)(фиг, 2 б) с шины 17. По индикатору 3; плавнорегулируя длительность выходных импульсов т,и генератора 2, добиваются тии=Ог = Ои(макс) и, регулируя время задержки тз, совмещают спады импульсов Ог и Оах(1).Импульсы Ог с первого выхода переключателя 7 поступают на первый вход интегратора 8,...
Предыдущий патент: Цифровая следящая система
Следующий патент: Пневматический регулятор
Случайный патент: Способ извлечения апатита из карбонатных руд