Способ моделирования решений систем линейных управлений
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 512476
Автор: Карпов
Текст
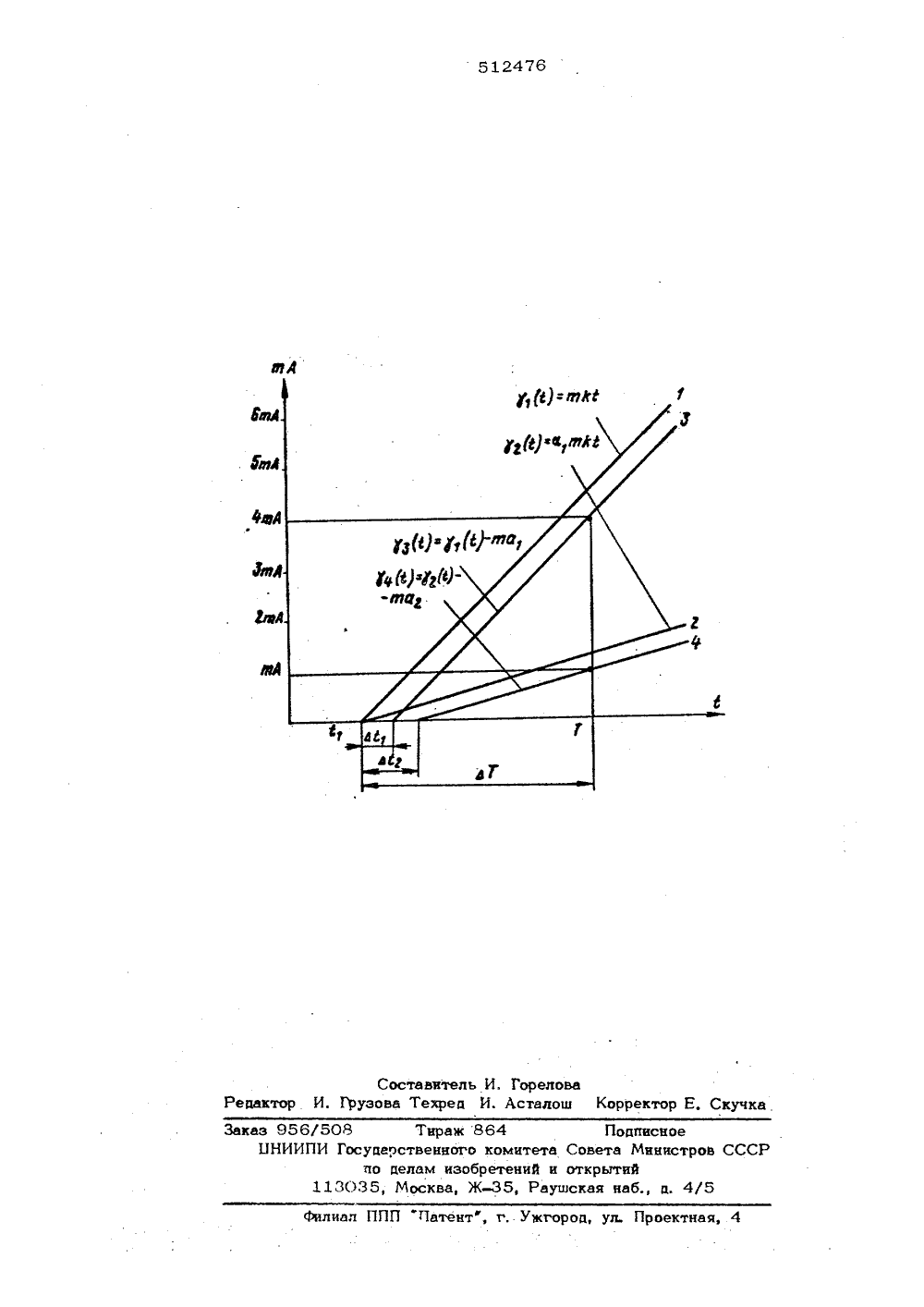
О П И С А Н И Е, 51247 ВИЗОБРЕТЕН ИЯ Союз Советских Социалистических республик) Заявлено 31,01,73 (21) 1883430/18 24 л,С,0 3 аявки-присоединен ) Приоритет ааударстваннмй каннтетСаввтв Мнннатрав СССРаа делам изаарвтеннйи аткрытнй5) Дата оп ования опксания 30,06.77) Заявитель СПОСОБ МОДЕЛИРОВАНИЯ РЕШЕНИЙ СИС ЛИНЕЙНЫХ УРАВНЕНИ Способ относ ычислительной ользован для м ы уравнений в я к области ники и може налоговойбыть исшения систе делировани а+ Ах1 Ах Аха) А а де 0-(а,ааиА иэв ациональные чи л ОС(с о(, - известные роби; ильные рапи нальн х) Х-не сла еш ная диаграм ба решения к личины и прямая 2 у = виде изменяющихинь м(х, хизвестные целые чи4 = 12,3, ,ПИзвестны способы моделированияний системы линейных уравнений, зчаюшиеся в том, что неизвестйые веи их линейные комбинации представлявиде изменяющейся физической величнапример напряжения. Цель изобретения - сокращение времени вычислений путем раскрытия многозначности в области возможных значений неизвестных.Это достигается эа счет осуществления следующих операций: формируют ряд пилообразных напряжений с заданным наклоном, пропорциональным т задерживают мо мент начала развертки пилы на время, пропорциональное заданным величинам (М 2и- сравнивает величину пилообф Л разного напряжения с рядом постоянных на пряженнй, пропорциональных А, 2 А, ЗА Х,ща, А, фиксируют момент времени одновременного равенства всех пилообразных напряжений с некоторыми иэ данного ряда постоянных напряжений и измеряют интерва времени от момента начала задержки развертки пилы до зафиксированного момента времени.На чертеже показана времен ма, поясняющая сущность сп системы линейных уравнений Прямая 1 у(Ю = т 1 1 25 =Ы.пт нт, моделируют в5124763ся во времена уровней фиэкческой величины соответствующие суммы цри текущих параметрах Х(Ф)п х,( П 1 -масштабный коэффициент преобразования, к -скорость нзменения физической велнчинй).Прямые 3 (1 ) н 4 ( 1 ) кзображают прямые 1 и 2, сдвинутые относи тельно момента времени Ф., на времяФх61 х аы ь 1 я усоответствен. но. Представляя Ь 1 и Ь я в уравнения Я прямых (Ф ) н )" ( Ф ) можно убедиться, что прямые 3 и 4=а +Ах 1 ф" а +Ах и 1 Способ моделирования решений снстемы ааейных уравнений вадау, З 1 Ю- й( - а)=у- (в) . (ф)- (+)= - ф моделируют соответственно величины ; А х ( 1. ) и АХ ( 1 ) пРи линейно возРвствющнх Х (Ф ).Очевидно, что в момент времени Т,; когда Ах (Т ) н Ах( Т ) одновременно равны некоторым из набора уровней л 1 А 2,еА, ЪщА, .,х,щ А, моделируется решение системы уравнений, в соог; ветствующие величины х 1 (Т ) = хн фб( Т ) = Хв являются корнями сис-, темы уравнений. Отсчитанные в моменты времени Т ордннаты прямых ( Т ) и( Т ) пропорциональны величинам, сумм )"=О,+АХ 1 и "я=схя 1 Дх цременной интервал ЬТТ- С 1 также про- порционален величинам этих сумм.Предлагаемый способ последовательно определяет н представляет все удовлетво- ряющне системы уравнений величины сумм в виде соответствующего каждой иэ сумм уровня некоторой физической величины ( в данном случае напряжения) и пропорциональ ного всем суммам временного интервала,40Таким образом, автоматически раскрывается многозначность в области возможных знвченнй неизвестных. где о(а, а а, а,)(А;а, А - известные рвцкональные числа1 Ъ яФ 17 7 1ос - известные правильные рациональные дроби;Я 7 )"1/""111Х - неизвестные целые числа;=1,2,3 изаключающийся в том, что неизвестные величины и их линейные комбинации представляют в виде изменяющейся физической велачины, например напряжения, о т л и ч а ющ и й с я тем, что, с целью сокрашениявремени вычислений, формируют ряд пилообразных напряжений с заданным наклоном,пропорциональным К , задерживают момент начала развертки пилы на время, пропорциональное заданным величинам а 1 я,О1. Фг,сравнивают величинупилообразного йайряжения с рядом постоянных напряжений, пропорциональных А, 2 А,3 А, , Х А, фиксируют момент времени одновременного равенства всех пилообразных напряжений с некоторыми нэ данногоряда постоянных напряжений и измеряют интервал времени от момента начала задержки развертки пилы до зафиксированного момента времени,512476 И, ГореловаИ. Асгалош Корре Редактор Ск СССР а иап ППП "Патент, г. ужгород, ул. Проектная Составитеузова Техре Заказ 956/508 Тираж 864 ЦНИИПИ Государственного комитет но делам изобретений 113035, Москва, Ж, РПодписноеовета Министоткрытийкая наб д. 4
СмотретьЗаявка
1883430, 31.01.1973
ПРЕДПРИЯТИЕ ПЯ Г-4620
КАРПОВ ВАЛЕРИЙ ИВАНОВИЧ
МПК / Метки
МПК: G06G 7/34
Метки: линейных, моделирования, решений, систем, управлений
Опубликовано: 30.04.1976
Код ссылки
<a href="https://patents.su/3-512476-sposob-modelirovaniya-reshenijj-sistem-linejjnykh-upravlenijj.html" target="_blank" rel="follow" title="База патентов СССР">Способ моделирования решений систем линейных управлений</a>
Устройство для получения напряжения или тока, пропорционального произведению двух электрических величин

Номер патента: 63239
Опубликовано: 01.01.1944
Автор: Чебышев
МПК: G01R 19/00
Метки: величин, двух, произведению, пропорционального, электрических
...не балапса.Для устранения этого Недостатка примепяются допоцте;пные переменные сопротивления 1 ц 2, включенные па обмотки измерительных трансформаторов так же, как соцротивлсция 1 и 2, а именно через равные соцротивлеция 21 и 22 - к обмоткам 13 и 14 трансформатора 11 и через равнье соп 1 зотвлени 28 и 24 - к обмоткам 17 и 18 трянсфорчдтора 12Поэтому по сопротцвлецгцо 1 протекает сумма токсв, д по сопротивлепио 2 - разность токоз, процорциоиальных 1 и 1.Однако, если какой-либо ток в данный момент в сопротивлении 1 цли 2 протекает сверху вниз, то в тл же момент в сопротивлении 1 цли 2 равный ему ток протекает снизу вверх, и Наоборот. Т;кцм оордзом, рсзультцруощее пддене цдп 1 Яжепя В п.еч; 7 - 9 или 8 - 10 От измеряемых токов рамзе:3...
Устройство для определения момента размыкания электрического тока и величины расхождения контактов прерывателя первичной цепи систем электрического зажигания двигателей внутреннего горения

Номер патента: 60924
Опубликовано: 01.01.1942
Автор: Великанов
МПК: H01R 39/02
Метки: величины, внутреннего, горения, двигателей, зажигания, контактов, момента, первичной, прерывателя, размыкания, расхождения, систем, цепи, электрического
...соединяющей рычаги 2 и 3.. 60924На боковом отростке рычага 2 нанесена шкала 9 с делениями для контроля величины расхождения контактов прерывателя.Рычаг 3 в средней части снабжен металлическим кольцом 10 с отверстием 11, свободно охватывающим цилиндрическую часть шарнира 1 рычага 2 при соединении обоих рычагов в клещи. Рабочая губка рычага 1 заканчивается контактом 12 в виде вилки, надеваемой на контактный винт наковальни прерывателя. Контакт 12 соединен проводником 13 с кольцом 10. Свободное плечо рычага 1 снабжено на боковом отростке указателем 14.Контроль работы прерывателя первичной цепи системы зажигания двигателя производят следующим образом. Сняв с прерывателя крышку и корпус, заводят контакт 12 рычага 1 на контактный винт...
Способ регулирования величины передаваемого крутящего момента центробежной гидравлической муфтой

Номер патента: 112461
Опубликовано: 01.01.1958
Автор: Лаборатория
МПК: F16D 33/04
Метки: величины, гидравлической, крутящего, момента, муфтой, передаваемого, центробежной
...пазона регули насосного или ости вращения льно оси вращ к, чтобы при ь приближался к рования в гидравличчения диа р лопаток ок в плоск м относите пособом тай момент Способы регулирования крутящего передаваемого момента изменением формы проточной части, например, за счет изменения расстояни 51 между туроинным и насосным колесами или путем изменения кОличества циркулирующего масла имеют тот серьезный недостаток, что величина передаваемого момента нс тожет быть весьма малой, приближающейся к нулю, из-за наличия дискового трения между турби 1 шыми насосным дисками-колесами,В описываемом способе величина передаваемого крутящего момента может изменяться от максимума до нуля.На чертеже изображено колесо с лопатками в положении выключено...
Устройство для измерения времени нарастания импульсов напряжения

Номер патента: 571772
Опубликовано: 05.09.1977
Авторы: Байгулов, Пахомов, Федоренко
МПК: G01R 29/02
Метки: времени, импульсов, нарастания
...а вторые - с вторым и третьим входами выходного ключевого элемента, Вход первого уси литепя подключен через дйфферепциуюцтую цепочку к входу устройства, а вход второгок выходу входного ключевого элемента, первый вход которого связан с входом устройства через пороговый элемент, выполненный иа стабилитроне, 3Структурная электрическая схема устройстве представлена на чертеже.Устройство состоит из порогового лемента 1, выполненного на стабилитроне, входно го ключевого элемента 2, конденсатора 3 и резистора 4 дифференцируюшей цепи, первого и второго усилителей 5, 6; генера. тора тактовых импульсов 7; выходного клв чеоого элемента 8 и счетчика импульсов 9,Устройство работает следующим образом При поступлении на вход устройства...
Способ определения момента формирования пускового импульса

Номер патента: 715818
Опубликовано: 15.02.1980
Автор: Другов
МПК: F02P 5/08
Метки: импульса, момента, пускового, формирования
...устройства 2 снимаются напряжениякоторыми ключ заряда 9 закрыт, а ключ разря.да 10 открыт, Конденсатор 12 разряжен, и на35входе 4 сравнивающего устройства 5 присутствует напряжейие, величина которого опреде-ляется начальным найряжением Ен ч, источнинач.ка начальной величины клемма 13) н током,протекающим по цели: источник начальной овеличины клемма 13), диод 11, ключ заряда 10.Прй появлении на выходе датчика 1 сигналафиг 2,а), длительность которого Т,1 определяется временем прохождения определенного 4 Зфазового угла Ч,1 рабочето цикла (фиг. 2,б),воздействующего на вход управляющего устройства 2, управляющие напряжения на выходах которого изменяются, ключ заряда 9 открывается, а ключ разряда 10 - закрывается. рЗа время Т 1...
Предыдущий патент: Логарифмический преобразователь
Следующий патент: Устройство для задания нелинейных граничных условий
Случайный патент: Трехпродуктовый гидроциклон для осветления маслосодержащих сточных вод