Система управления двусторонним пневматическим приводом12
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 394151
Авторы: Велосипедный, Масюков, Пильчнн

Текст
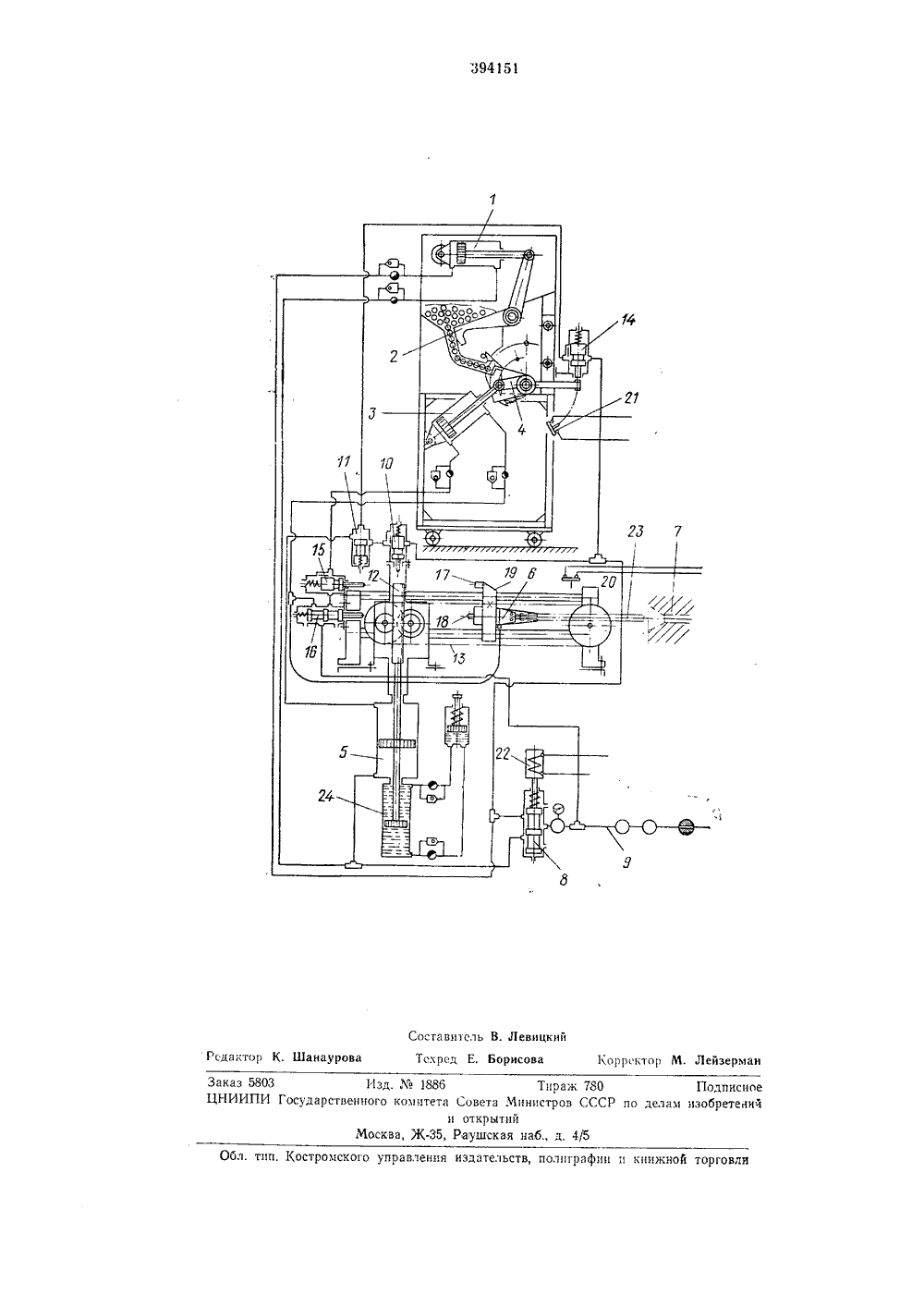
Союз Советских Социалистических РеспубликОПИСАНИЕ 39415ИЗОБРЕТЕН И ЯК АВТОР СКОМУ СВИДЕТЕЛЬ СТВУ Зависимое от авт. свидетеЗаявлено 27,11.1969 (ЛЪ 1 ьства Ле 08176/26-27.Ц.Кл. В 2 Ц 13/08Б 21 г 43/04 е присоединением заявкиПриоритет Государственный комте Совета Мннстров ССьр оо делам изобретен бликовдцо 22.ъ 11.1973. Бюллетень УДК 621.983,06 (088.8 и открьгии пи 51 1 1. 1.197 дтд опубликования опи. Авторыизобретен В, К, Масюков и А. Е. Пнский мотоциклетный и вело Заявител едныи зав СИСТЕМА УПРАВЛЕНИЯ ДВУСТОРОННИМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ2 2 Управленце р обеспечивается рчя содсрх иг тель 8 с электр магвтстраль 9 с зо пневмоцилиндроаботой исполнительных узлов системой управления, котонневматический распределиоуправлецием, соединяющий жатого воздуха с полостями в 1 и 5. Рабочая полость 11 зобретецие относится к области автоматизации кузнечно-штамповочного производствд и может быть использовано в ротационно-оожимцых машинах,Известны системы управления двустороц. цим пневматическим приводом исполнительных узлов технологических машин, содержащие пневмораспределитель, соединяющий с помощью трубопроводов полости рабочего и холостого ходов привода с магистралью сжатого воздуха.Такая система управления двусторонним пцевмоприводом ооеспечпвает только симметричный цикл рабочего и холостого ходов исполнительного узла.Однако часто бывает необходимо осуществигь рабочий ход подвижных звеньев исполнительных узлов с промежуточной остановкой при непрерывном перемещении подвижного звена во время его холостого хода. Например, указанная циклограмма движения захватного юргаца механизма подачи требуется в ротационно-обжимных машинах.Промежуточная остановка подвижных звеньев исполнительных узлов машин во время пх рабочего хода обеспечивается тем, что,предложенная система управления двусторонним пневмоприводом снабжена двумя последовательно установленными ца трубопроводе, соединяющем упомянутый пневмордепределитель е рябочеи юлостью привода,двухходоиями клапанами, один пз которых,управляемый подвижным звеном исполнительного узля, выполнен нормально закрытым, д другой - нормально открытым с подпружиненным золотником, приводимым вдвижение сжатым воздухом, поступающим отмагистрали через еще один пневмораспреде,титель, которым снабжена система управлеция и посредством которого полость рабочегоходя приводя до олцптельцо связана с магпстрдлькьНа чертеже изооражеца пневматическаясхема управления узлами автоматическойл загрузки заготовок в рабочую зону ротационно-обжимной машины.Пршюд узлов автоматической загрузки осуществляется от ппевмоццлиндрд 1 ворошителя 2, иневмоцилицдря 3 механизма 4 поштучи цой выдачи и пцевмоцилцндря 5 захватногооргана 6 механизма подачи заготовок в рабочую зону 7 ротационно-обжимной машиныпневмоцилиндра 5 (на чертеже - верхняя) соединена с пневмораопределителем 8 через два последовательно установленные двухходовые нормально закрытый 10 и нормально открытый 11 клапаны. Управление клапаном 10 осуществляется рейкой 12 механизма подачи, которая с помощью цепной передачи 13 приводит в поступательное движение захватный орган б, Управление клапаном 11 осуществляется сжатым воздухом, поступаю- О щим из магистрали через пневмораспределитель 14, который управляется механизмом 4 поштучной выдачи. Полости пневмоцилиндра д соединены с магистралью через воздухораспредел ители 15 и 16, у направляемые упорами 15 17 и 18, укрепленныхги на захватном органе. Пневмораспределитель 8 управляется клином 19 с помощьо электровыключателя 20 и механизмом поштучной выдачи посредством электровыключателя 21. оВ исходном положении пневморасгпределителя 8 (его электромагнит 22 отключен) воздух подается от пневмораспределителя 14, открытого механизмом поштучной выдачи, в рабочую полость пневмоццлиндра 5, хггшуя 25 закрытыс клапаны 10 и 11, Тем самым захватный орган с заготовкой 23 перемещается в рабочую зону 7, В конце своего рабочего хода заанй орган элект 1 овьгклго гателег 20 включает электромагнит 22, и пневморас прсделитель, переключпвшись, соединяет с магистралью полость холостого хода пневмоцилиндра 5 ц одну из полостей пневмоцилгшдра 1. В конце обратного хода захватный орган переключает воздухораспределители 5 15 и 16, в результате чего захватный орган раскрывается, освобо 2 кдая обработанную заготовку, а механизм поштучной выдачи совершает рабочий ход, подавая очередную заготовку в захватный орган. В то же время рейка 12 открывает норгмальцо закрытый клапан 10, а нормально открытый клапан 11 возвращается в исходное положение в результате псреключеггия под действием пружины пневмораспределитсля 14. После того как в г 5 конце своего рабочего хода механизм поштучной выдачи электровыключателем 21 выключает электромагнит 22, воздух из магистрали поступает в верхгцою полость цилиндра через пнсвмораспредслитель 8 и клапаны 50 10 и 11, Происходит рабочий ход (на чертеже - вправо) захватного органа и опускание рейки. После опускания рейки на определенную вели пиу нормально закрытый клапан 10 закрывается, соединив рабочую полость цилиндра 5 с атмосферой, и захватный орган останавливается, успев до этого переключить пневмораспределители 15 и 16, что обеспечивает возвращенце механизма по. штучной выдачи в исходное положение, В кон цс своего обратного хода механизм поштучной выдачи переключает ппегзмораспределитель 14 и подает дополнительно сжатый воздух из магистрали в рабочую полость (верхнюю полость цилиндра), который, проходя через клапан 11, закрывает его, отсекая тем самым ранее действующую пневматическую сеть. В результате после промежуточной остановки захватный орган продолжает рабочий ход в зону обработки, после чего цикл повторяется. Торможение захватного органа в конце рабочего хода осуществляется гидравличеоким демпфером 24.Предмет изобретенияСистема управления двусторонним пневматическим приводом механизма подачи заготовок в технологические машины, например в ротационно-обжимные машкины, содержащая пневмораспределитель, соединяющий с помощью трубопроводов полости рабочего и холостого ходов привода с магистралью сжатого воздуха, отличающаяся тем, что, с целью обеспечения промежуточной остановки подвижного звена упомянутого механизма подачи во время его рабочего хода, она снабжена двумя последовательно установленными на трубопроводе, соединяющем упомянутый гшевмораспределитель с рабочей полостью привода, двухходовыми клапанами, один из которых, управляемый подвижным звеном, выполнен нормально закрытым, а другой - нормально открытым с подпружиненным золотником, приводимым в движение сжатым воздухом, поступающихг от магистрали через еще один гшевмораспределитель, которым снабжена система управления и посредством которого полость рабочего хода привода до. полнительно связана с магистралью.394151 Составитель В. Левицкир вред Е, Борисова Корректор М. Лейзерыа Редактор К. Шанаурова Подписное по делам изобретенийЗаказ 5803 ЦНИИПИ сударственно Обл. тпп. 1(остромског зд. Уа 1886 Тираж 780го комитета Совета Министров СССРи открытийсква, Ж, Раушская наб., д. 4/5управления издательств, полиграфии и книжной торго
СмотретьЗаявка
1308176
В. К. Масюков, А. Е. Пильчнн Минский мотоциклетный, велосипедный завод
МПК / Метки
МПК: B21D 43/04, B21J 13/08
Метки: двусторонним, пневматическим, приводом12
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/3-394151-sistema-upravleniya-dvustoronnim-pnevmaticheskim-privodom12.html" target="_blank" rel="follow" title="База патентов СССР">Система управления двусторонним пневматическим приводом12</a>
Способ получения рабочих полостей

Номер патента: 531627
Опубликовано: 15.10.1976
МПК: B22C 7/00
...гибких растяжек 4 и металлического каркаса 5. Эластичную оболочку 3 закрепляют на вершине 6 каркаса 5 и по периметру основания 7. Эластичная оболочка 3 запирается пробкой 8 при помощи пружины 9. При формовке подмодельную плит 2 переворачивают моделью 1 вниз, натяжением тросика 10 открывают пр ку 8, при этом металлическая дробь 11, на дящаяся в полости 12 формуемой мод 1, устремляется в эластичную оболочку 3, ра стчгивает ее и придает ей шаровидную форму.Отпуская тросик 10, запирают эластичную оболочку 3 пробкой 8, переворачивают подмодельную плиту 2 на 180, устанавливают на нее опоку 13, которую заполняют формовоч ной смесью 14.После уплотнения формовочной смеси натяжением тросика 10 открывают пробку 8, и металлическая дробь высыпается...
Механизм поворота лопастей рабочего колеса осевой машины

Номер патента: 1139880
Опубликовано: 15.02.1985
Автор: Гинсберг
МПК: F03D 7/04
Метки: колеса, лопастей, механизм, осевой, поворота, рабочего
...такого механизма поворота лопастей являются невысокие точность и надежность регулирования.Наиболее близким по технической сущности и достигаемому результату к изобретению является механизм поворота лопастей рабочего колеса осевой машины, содержащий закрепленные на. цапфах лопастей рабочего колеса ведомые элементы и взаимодействующий с ними ведущий регулирующий диск, установленный на вращающемся валу 2.Однако механизм не обеспечивает поддержание постоянной частоты вращения рабочего колеса при использовании осевой машины в качестве турбины.Цель изобретения - повышение надежности работы осевой машины при ее использовании в качестве турбины путем поддержания постоянной частоты вращения рабочего колеса.Указанная цель достигается...
Устройство для контроля наличия заготовок в захватных органах подающего механизма

Номер патента: 698715
Опубликовано: 25.11.1979
Автор: Рачицкий
МПК: B21J 13/08
Метки: заготовок, захватных, механизма, наличия, органах, подающего
...Каждый из щупов соединен с системой управления при помощи двуплечих рычагов 4, 5 и 6 через датчики 7,9 Вершины щупов 1, 2 и 3 разводной плоскости и по окружностром, соответствующим центру загПринцип работы устройствавследующем.При захвате заготовки 8 захватными губками положение заготовки контролируется щупами. При правильном ориентированном положении заготовки щупы отходятназад и воздействуют на двуплечие рычаги,которые в свою очередь воздействуют на20 датчики. Одновременно срабатывание всехдатчиков является показателем правильногоориентированного положения заготовки ислужит командой для возможности осугцествления манипулирования заготовкой соглас"Е Ь ,еЫв1 698715 Фор,иула изобретения Соста Техред Тираж дарстве брет- 35витель А....
Устройство для комплексного управления органами сложного механизма

Номер патента: 67551
Опубликовано: 01.01.1946
МПК: G05B 17/02
Метки: комплексного, механизма, органами, сложного
...все нормально разомкнутые контакты 4, - 4, и 4 - 4 замкнуты, а нормально разомкнутые 4, - 4, и 4 - 4 разомкнуты. Таким образом, командные реле 1 и 2 обесточены. При задании одной или нескольким основным следящим системам угла отработки а реле 4 этих систем отпускают (например, отпускает реле 4 з) и замыкают свои нормально разомкнутые контакты (например, контакт 4 з). Образуется цепь для командного реле 1, так как репитерная система находится в начальном положении и нормально разомкнутые реле 4 замкнуты, Сработавшее реле 1 самоблокируется и подключает к управляющим сеточным трансформаторам ТСи ТСосновные следящие системы ВО, Двигатель (третьего рабочего органа) ьачинает отрабатывать заданный ему угол и при этом заводится репитерная...
Способ нанесения пиролитического углерода на литейные формы с изолированной рабочей полостью

Номер патента: 664741
Опубликовано: 30.05.1979
Авторы: Александров, Васин, Коновалов, Кулаков
МПК: B22C 3/00
Метки: изолированной, литейные, нанесения, пиролитического, полостью, рабочей, углерода, формы
...порядка 1100 в 12 С, когда наблюдаются высокие скорости химической реакции термического разложения, например пропана. При данной проницаемости форм нижние значения удельного расхода газов обеспечивают осаждение необходимого количества пиролитического углерода до 4 - 5,5 вес; %. Дальнейшее понижение удельного расхода уже не обеспечивает осаждение данного количества пиролитического углерода, так как снижается скорость фильтрации газа через формы и процесс становится нетехнологичным.Верхний предел удельного расхода газов 480 л/ч на 1 кг ограничен нижним значением проницаемости форм, например 0,8 10 - " м, а также нижним диапазоном температур 750 - 850 С, когда скорости отложения пироуглерода в несколько раз ниже, чем при 1100 - 1250...
Предыдущий патент: Гидровинтовой бесшаботный пресс-молот
Следующий патент: Наполнитель на основе электрокорунда для литейного производства
Случайный патент: Устройство для защиты двигателя внутреннего сгорания