Следящая система для отработки векторнойфункции
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 277905
Авторы: Тимофеенко, Федюнин

Текст
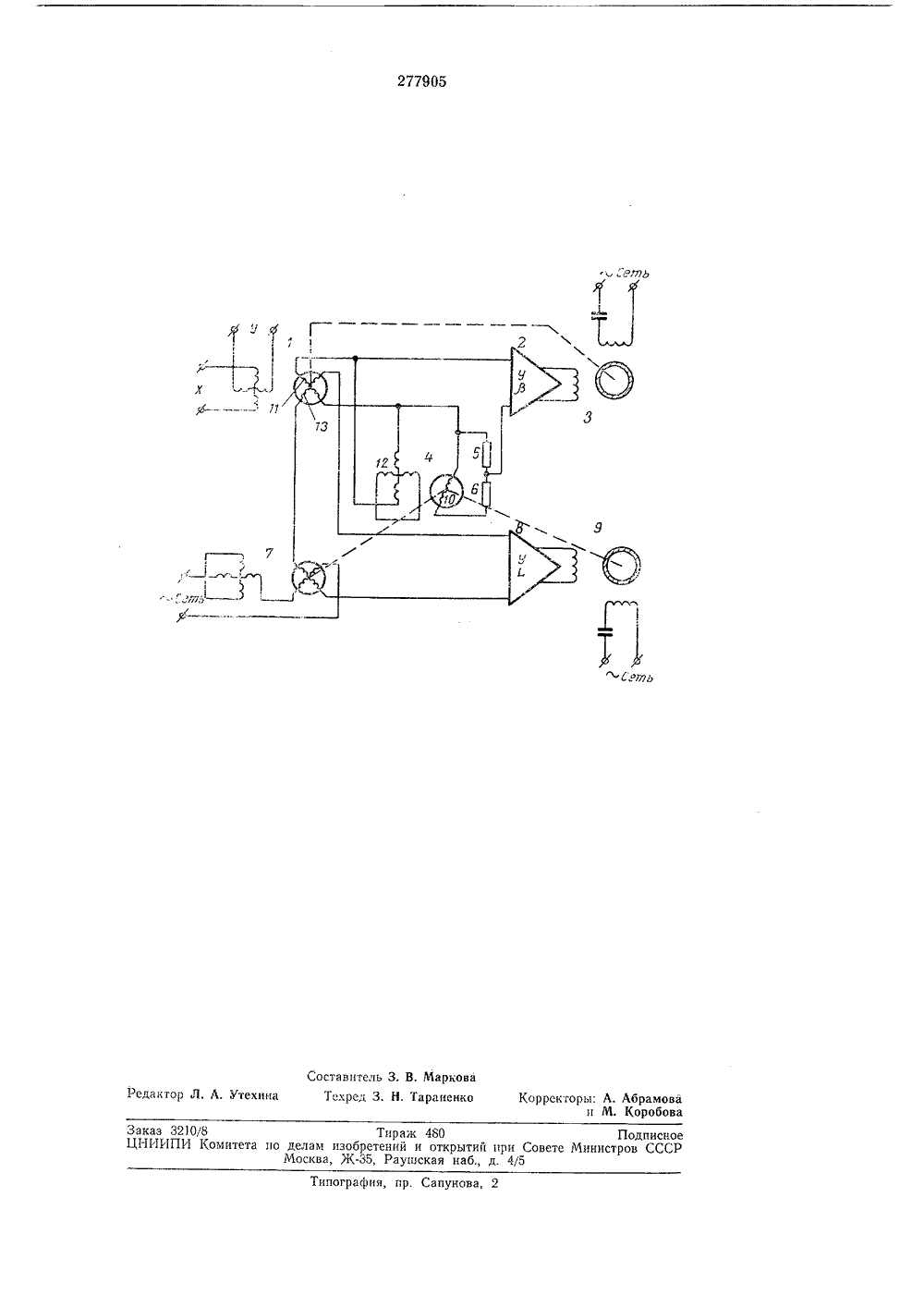
сеоою, чую 1ь"О П С"А"Й И ЕИЗОБРЕТЕНИЯК АВТОРСКОМУ С 1 ИДЕТИхСТУ 277905 Союз Советских Социалистических РеспубликНомитет по делам изобретений и открытий при Совете Министров СССР.1970, Бюллетень ач" я описания 19,Х 1.1970 Авторыизобретени А, И. Тимофеенко и А. Федюн Заявитель СТЕМА ДЛЯ ОТРАБОТКИ В ФУНКЦИИ ОЙ ЛЕДЯ рнои оомоткп 1 ьное модулю век усилителя 8 сле, дуля вектора 1, отрабатывающего ляет двигателем напряжение, ра С, постущей системы С квадрату пропорционал пает на вход отработки мо противофазе 0 литель управНа чертеже устройства.Оно содержи синусный в с сигналом в СКВТ 7, Усикоторый поИзобретение относится к счетно-решающим следящим системам,Известные следящие системы для отработки векторной функции имеют переменную чувствительность, определяемую формульной чувствительностью решаемых уравнений. Поэтому они в системах отработки угла вектора и его модуля, кроме отрабатывающих синус- но-косинусных вращающихся трансформаторов, усилителей и двигателей, содержат устройство для выравнивания чувствительности.Предлагаемая следящая система отличается тем, что в нем выравнивающее устройство содержит вращающийся трансформатор, ротор которого расположен на одном валу с двигателем отработки модуля, а роторная обмотка через делитель подключена на вход усилителя последовательно и встречно с роторной обмоткой вращающегося трансформатора системы отработки угла вектора, причем параллельно последней обмотке подсоединена статорная обмотка вращающегося трансформатора выравнивающего устройства.Это позволяет упростить систему и повысить ее надежность. ана принципиальная схем отрабатывающий синуснощающийся трансформа(СКВТ) 1, усилитель 2 и двигатель 3 системы отработки угла вектора, вращающийся тпансформатор (ВТ) 4, делитель устройства для выравнивания чувствительности 5, б, отпабаты вающий синусно-косинусный впашатотттийсятрансформатор 7, усилитель 8 и двигатель 9 системы отпаботки модуля.Ротор ВТ 4 кинематически связан с двигателем 9 и ротором СКВТ 7, а потопная об- О мотка 10 через делитель э, тт вклточена навход усилителя 2 последовательно с обмоткон 11 ротора СКВТ 1, параллельно котопой подключена статорная обмотка 12 ВТ 4. На статорные обмотки отрабатывающего СКВТ 1 5 поступают напряжения Х и т, пропорциональные линейным составляющим вектора С роторной обмотки 11 сигнал рассогласования, пропорциональный углу й вектора т, поступает на усилитель 2 следящей системы, который управляет двигателем 8, Двигатель поворачивает СКВТ 1 в сторону уменьшения сигнала рассогласования, к его нулевому значению.ворачивает отрабатывающий СКВТ 7 и выравнивающий ВТ 4.Для выравнивания формдльной чдвствительности отработки вектора Е напряжение, пропорциональное рассогласованию следящей системы отработки р, подается на выравнивающий ВТ 4, кинематически связанной с валом системы отработки 1 пропорционально которому изменяется чувствительность системы отработки Р.Напряжение с выхода роторной обмотки 10 ВТ 4 сдммируется с сигналом рассогласования следующим образом.При Е)ЬО (Ео - величина формдльной чдвствительности) сигнал с ВТ 4 вычитается из сигнала рассогласования, уменьшая тем самым его крутизну,При .С(Х, фаза выравнивающего сигнала изменяется на обратную, увеличивая тем самым крутизну сигнала рассогласования, Масштаб сигнала выравнивания подбирается коэффициентом трансформации ВТ 4 и делителем б, б.Выбирая отношение 1.О,1., масштаб выравнивания К и цену оборота выравнивающего ВТ 4, можно получить различные выравнивающие зависимости,Аналитически сигнал рассогласования Л, поступающий после выравнивания на вход усилителя, можно представить следующим образом:Ь - К 1 К 1 К йп К 1О)где Р - рассогласование следящей системы;1,О - величина формдльной чдвствительности;К - коэффициент масштаба сигнала выравнивания, определяемый коэффициентом трансформации выравнивающего ВТ 4 и коэффициентом делителя о, б; К - коэффициент пропорциональности, определяемый ценой оборота выравнивающего ВТ 4,5 Тогда колебание крутизны сигнала рассогласования в пределах изменения Е(1-( с.Е , относительно принятого значения чдвствительности 1, выражается в видеА - 8 ЛКО я 1 п К (Е - о)10ГоЛ - Жо Зп К ( - о) о 15 При необходимости более жесткого выравнивания выравнивающие ВТ 4 соединяются с редуктором через некруглую пару или функциональный кулак.20Предмет изобретенияСледящая система для отработки векторнойфункции, содержащая системы отработки 25 угла вектора и его модуля, выполненные изотрабатывающих синдсно-косиндсных вращающихся трансформаторов, усилителей, двигателей и устройства для выравнивания чдвствительности, отличающаяся тем, что, с 30 целью упрощения и повышения надежностисистемы, устройство для выпавнивания чдвствительности содержит вращающийся трансформатор, ротор которого расположен на одном валу с двигателем отработки модуля, 35 а роторная обмотка через делитель подключена на вход усилителя последовательно н встречно с роторной обмоткой вращающегося трансформатора системы отработки угла вектора, причем параллельно этой последней 40 обмотке подсоединена статорная обмотка вращающегося трансформатора выравнивающего устройства.акт хред Заказ 3210/8 Тираж 450 ПодписноеЦ 11 ИИПИ Комитета ио делам изобретений и открытий при Совете Министров СССРМосква, Ж, Раушская наб., д. 4/5 биография, пр. Сапунова,
СмотретьЗаявка
1304708
А. И. Тимофеенко, А. Н. Федюнин
МПК / Метки
МПК: G05B 11/06, G06G 7/00
Метки: векторнойфункции, отработки, следящая
Опубликовано: 01.01.1970
Код ссылки
<a href="https://patents.su/3-277905-sledyashhaya-sistema-dlya-otrabotki-vektornojjfunkcii.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система для отработки векторнойфункции</a>
Оптическая система для выравнивания интенсивности по сечению лазерного пучка

Номер патента: 986194
Опубликовано: 23.02.1984
Авторы: Вереникина, Рожков
МПК: G02B 27/48
Метки: выравнивания, интенсивности, лазерного, оптическая, пучка, сечению
...в . соответственно ди-.аметр пучка на входеи в плоскости диафрагмы по уровню интенсивности 1/9;Х в Фокусное расстояниемикрообъектива;Рз,- диаметр однородногоплоского пучка наФ выходе системы 1плс(л - коэффициенты преломления и поглощениянейтрального стекласоответственно.На чертеже изображена схема одного из возможных вариантов предлагаемой оптической системы.Оптическая система для ныравнивания интенсивности по сечению лазерного пучка содержит телескопическую систему иэ последовательно установленных по ходу пучка микрообъектива 1, диафрагмы 2, отрицательной линзы 3 из бесцветного стекла и положительной линзы 4 из нейтрального стекла.Система работает следующим образом. Микрообъектив 1 формирует иэображение перетяжки гауссовалазерного пучка...
Оптическая система для выравнивания интенсивности по сечению пучка

Номер патента: 1282050
Опубликовано: 07.01.1987
Автор: Архипов
МПК: G02B 27/46, G02F 1/03
Метки: выравнивания, интенсивности, оптическая, пучка, сечению
...по сечению пучка на транспаранте 5 и на преобразователе 10 совпадают независимо от геометрии пучка (параллельный, схоР дящийся, расходящийся), поскольку эти элементы одинаково удалены от светоделительной пластины 3. Освещение полупроводникового фотослоя 13 вызывает уменьшение его сопротивления и перераспределение .напряжения П, в результате которого значительная его часть оказывается приложенной к электролюминофору 15, что вызывает его свечение. Причем распределение интенсивности свечения электролюминофора повторяет соответствующее распределение по сечению пучка, падающего на преобразователь. Спект 1282050ральный состав излучения электролюминофора выбирается с учетом спектральной характеристики фотопроводника 9. Таким образом, с...
Устройство для формирования сигнала рассогласования

Номер патента: 1277064
Опубликовано: 15.12.1986
МПК: G05B 1/01
Метки: рассогласования, сигнала, формирования
...выходе счетные импульсы, которые подсчитываются реверсивным счетчиком 9 с соответствующим знаком.В блоке 13 цифроаналогового пре" образования код с выхода реверсивного счетчика 9 преобразуется в постоянное напряжение. Знаковый выход преобраэбвателя 20 кодов, управляя коммутатором 22, определяет знак опорного напряжения цифроаналогового преобразователя 21. Модуль величины опорных напряжений, получаемых иэ источника 23 опорных раэнополярных напряженийП" 2 Кгде П - величина опорного напряже-йния;К - максимальное число, которое можно записать в реверсивный счетчик 9;П - максимальное значение выходного напряжения первого4 Фазочувствительного выпрямителя,Таким образом, с выхода блока 13 цифроаналогового преобразования снимается напряжение,...
Система выравнивания токовой загрузки вентилей инверторов

Номер патента: 877781
Опубликовано: 30.10.1981
МПК: H02P 13/18
Метки: вентилей, выравнивания, загрузки, инверторов, токовой
...инверторов 1-3 содержит реактор анодной 4 и катодной 5 групп с соответствующими дат: чикамн токов групп б и 7 и вентили анодной 8 и катодной 9 групп с соответствующими системами управления группами 10 и 11. На выходе переменного напряжения инверторон могут быть. включены параллельные 12 или последо нательные 13 элементы ( например, конденсаторы, реакторы, компенсаторы реактивной мощности, обратные выпрямители и др. ). Автономные иннерторы 1-3 включены параллельно по входу 35 постоянного напряжения и работают на общие шины нагрузки 14.Рассмотрим работу устройства 15 выравнивания токов анодной и катодной групп автономного иннертОра 1. Рабо- . 4 та устройства 15 выравнивания в инверторах 2 и 3 аналогична.Сигналы с датчиков анодной б и...
Устройство для измерения модуля вектора рассогласования двух процессов

Номер патента: 993277
Опубликовано: 30.01.1983
Автор: Волков
МПК: G06G 7/14
Метки: вектора, двух, модуля, процессов, рассогласования
...выполнено с достаточной степенью зточности.На фиг, 1 приведена структурнаясхема одного из возможных вариантовустройства для измерения модуля вектора рассогласования двух процессов;на фиг. 2 - график, отображающий из"менение вектора рассогласования дляполовины квадранта,Устройство для измерения модулявектора рассогласования двух процессов содержит первые две входные шины1, соединенные с входами первого дифФеренциального усилителя 2, вторыедве входные шины 3, соединенные с входами второго дифференциального усилителя 1, третий дифференциальный усилитель 5, а также сумматор 6, выходкоторого соединен с выходной шиной 7.Кроме того, устройство содержит первый, второй и третий выпрямители 8- 10,каждый из которых включен между однимиз...
Предыдущий патент: Дугогасительное устройство
Следующий патент: Бесконтактный регулятор инерционных объектов
Случайный патент: Устройство для подачи жидкости к упаковкам упаковочной машины