Способ формирования управляющего воздействия
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 276207
Авторы: Александров, Нестеров, Филиппова, Электрометрии

Текст
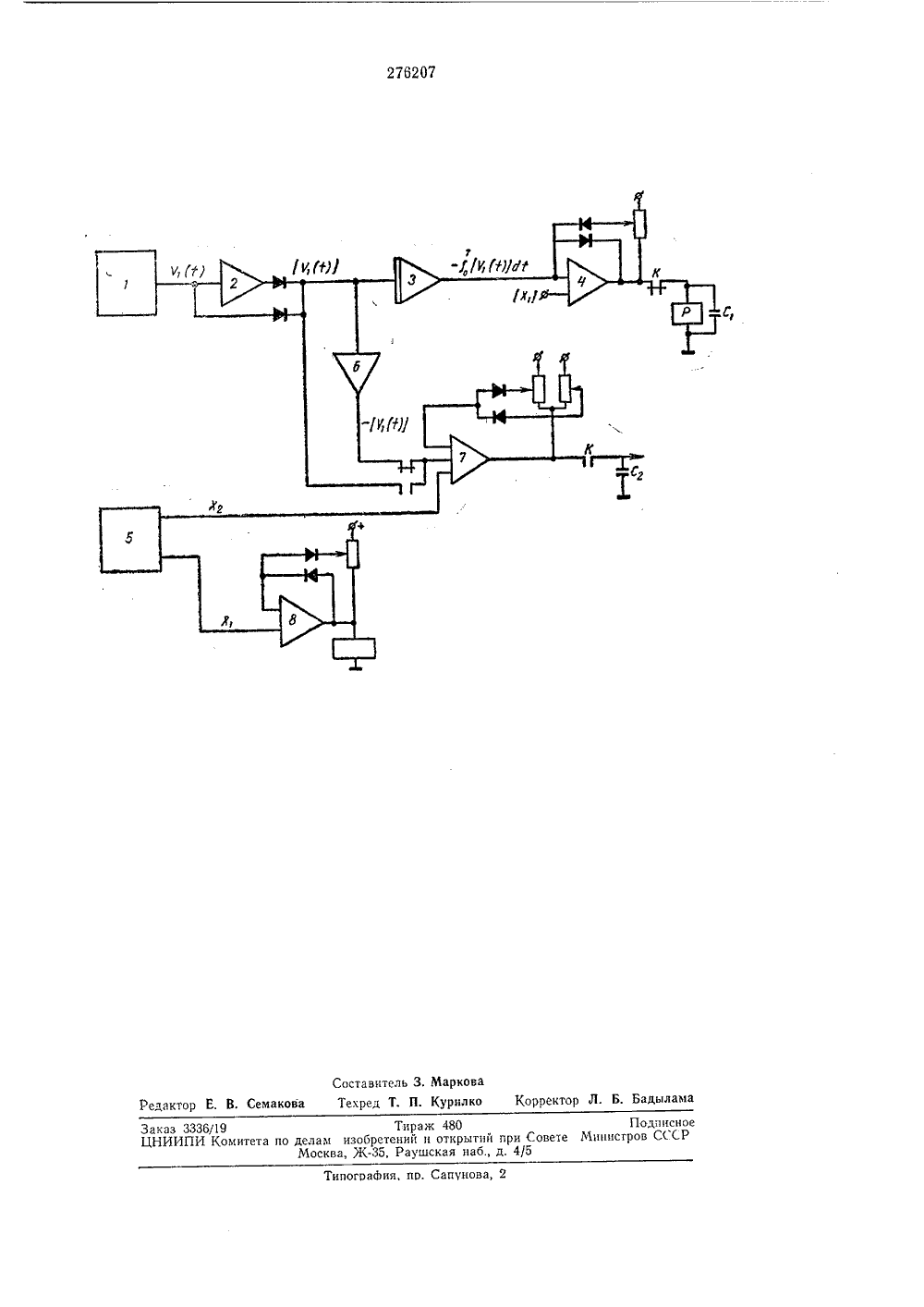
у хбнблнэтзца. Ь; .,т 2762 О 7 Сои Сосетских Социалистических Республик-24) ЛЪ 1333604 Заявлено 27 Л.196с присоединениех заявкиМП 1 6 05 Ь 17/00УДК 621,3,078(088.8 верите Комитет по делам иаобретений н открытий при Сапате Министрае СССРгоньВ.Х 1.197 Опубликовано 14.И 1.1970, Бюл убликования описания Дат Авторыизобретения. М. Александров, А. А. Несте илиппова Заявител ститут автоматики и электрометр СПОСОБ ФОРМИРОВАНИЯ УПРАВЛ О ВОЗДЕЙСТ о рого п квадратичная матриь дка,В - вектор координатучая Ь,=О, Ь.=Ь),(для нашего Способ относится к области оптимального управления линейными объектами. В системах автоматического управления важным показателем качества работы системы является гремя переходного процесса. В связи с этим 5 большой интерес представляют системы, обладающие максимальным при заданных ограничениях быстродействием, т, е. системы оптимальные по быстродействию.Известный способ формирования уиравля ющего воздействия при оптималы.см управлении предполагает, кроме модели объекта, работающей в :отрицательном времени, так же необходимост., получения кривой цли по. верхности переключения. Блок формирования 15 знака .правления и блок для получения крц. вой переключения связацы между собой, и также с объектом и с моделью ооъекта. Необходимость построения кривой переключенця влечет за собой использование в системе г. 2 равления функциональных преобразователе:".:, которые вносят значительные сшибки в закон правления и, кромс того, сильно усложняет перестройку системы при изменении параметров управляемогс Осъекта. 2Предлагаемый способ позволяет осуществить для линейных систем второго порядка с одним управляющим параметром и с любыхш собственныхц значениями матрицы объекта оптимальное по быстродействию управление, 3 не прибегая к синтезу оптимальной кривой переключения. Это повышает точность работы системы оптимального управления и значительно упрощает ее.Предлагаемый способ отличается от известного тем, что срашшвают модуль выходного сигнала объекта и интеграл от модуля выходного сигнала модели об:скта, выдающей сигнал в обращенном ускоренном времени при нулевых входных воз,;ействпях, прц равенстве сравниваемых величин прекращают интегрирование и в этот момент определяют знак управляющего воздействия с помощью выходного сигнала объекта и модуля выходного сигнала модели.На чертеже приведена схема, поясняющая описываемый способ.Способ основан на следующем.П сть управляемый об ьект описывается линейным дифференциалычым уравнением:(2) Решая задачу отыскания оптимального управляющего воздействия на основе пршщипя максимума путем некоторых преобразований, можно свести задачу к решению следующей системы уравнений:то,йз 10 п 1 о,с, + о,с,1 Ж - х о дгзятельно, вектор о есть выходной сигнал ъодсг упр 11 вл 51 смого сбъектя, работаОще 1 В бр 1 гпО: Врсмс 1 Ин 01 с"Гствии Входих с 1 я лов с и".я,ьпь. В ,тО 30 о (0) =-В. Век" то" о(.) получасгся ня выходе модели объек т, (1), затем проделывают следующиеоперации для получения знака управля 1 ощего воздействия ня основе системы уравнений (3), Первое уравнение системы переписывают 15 следующим образом:то, Ж = х,; в 1 дпс,= - в 1 дпх,. (4) оь 1:пх,о 1 Т) +О= - х 2,(3) относительно трех неизвестных с с, Т, где с, и са - направляющие косинусы сопряженного вектора Ч"о,Т - время оптимального переходного процесса,о - вектор-функция, о = е - "В.Можно далее показать, что система (2) в смысле отыскания оптимального управления эквивалентна следующей системе: о, (1) з 1 дпо, с, й = - хо тоа(1) з 1 дпо,(1) с,)гй + 6 = - хос, = 1, ) причем знак управляющего воздействия и определяется знаком функции 0=(с 1; с 2; Т), т. е. и=з 1 дпО (здесь Т не равно времени оптимального переходного процесса). Такое преобразование системы уравнений (2) в систему (3) понижает размерность исходной системы уравнений относительно составляющих сопряженного вектора Чо на единицу. Это упрощение позволяет создать простой способ получения управляющего воздействия. С помощью аналоговой вычислительной техники из первого уравнения системы (3) находятся Т и с 1, после чего знак управляющего воздействия формируется из второго уравнения по формуле ти=яапО - пппп,пКпппЙ+.оВектор о(1) можно вычислить с помощью аналоговой техники следующим простым способом. Рассмотрим динамическую систему, описываемую дифференциальным уравнением о= - Ао. Поскольку решение этого уравнения имеет вид о(Е) =е - "о(0), то, положив о(0) =В, будем иметь о =е-л В,Таким образом, вектор о(1) можно получать как решение линейного дифференциального уравнения о= - Ао при о(0) =Б. 1;1 о это уравнение соответствует объекту, описываемому ураВнением (1) прн и=0, дВижение которого происходит В "обратном времени. СлеУч:Тыва 51 (4) и равенство о 2(1)= - о 1, второ" уравнение системы записывается следую щнм образом: Следог:ятельно, пз уравнения (5)и = -- зфпз 1 Рпх, о, + хаД, (6)Н основе уравнеНй (4) и (б) построен опинС 1.ЫИ СГОооо.Сигнал с 1) с выхода модели 1 через усил гель 2, формируощий модуль от этой ве линшы (о ) подается на интегратор 3.,ялес 1 Впряже 11 е с В 1 ходя интегратора,5по;тупает па усилитель 4, который играет роль сравнивающего устройства, На второй вход этого усилителя поступает модуль вы х.диого сигнала обьекта б (х). В моментравенства сравгиваемых сигналов (1= Т) на в 1 ггоде С 11 лгеля 1 срабатывает реле Р и от. 11 о 1 яетс 51 от выхода усилителя через свой ко, такт К, что равносильно прекращению ин те.пирования в момент 1=Т. Модуль выходного сигнала модели (о (,) ) через инвертируощий усилитель 6 и в.:ходной сигнал объект:. х поступа 1 от на усилитель 7, на основе ко,орого создана схема вычисления знака уп равляющего воздействия по формулеи= - В 1 ЯПз 1 Япх 1 о 1(Т)- л 21 Усилитель 7 (также как и усилитель 8)имеет релейную характеристику.50Предмет изобретенияСпособ формирования управляющего воз.дей твия при оптимальном управлении линейным объектом второго порядка с использова нисм модели объекта, отлича 1 о 1 иийся тем, что,с келью упрощения и повышения точности уг р: аления, сравнивают модуль выходного сипала объекта и интеграл от модуля выходного сигнала модели объекта, выдающей 60 сигнал в обращенном ускоренном временипрп нулевых входных воздействиях, при равенстве сравниваемьх величин прекращают Н пг РИРОВЯНИЕ И В ЭТОТ МОМЕНТ ОПРЕДЕЛЯЮТ зн: управляющего воздействия с помощью 65 вь.,сдного сш нала об екта и модуля выходного сигнала модели.Составитель 3. МарковаРедактор Е, В. Семакова Текред Т. П. Курилко Корректор Л. Б. БадыламаЗаказ 3336/19 Тираж 480 Подписное ЦНИИПИ Комитета по делам изобретений н открытий при Совете Министров СССР Москва, Ж, Раушская наб., д. 4/5 Типография, по. Сапунова, 2
СмотретьЗаявка
1333604
В. М. Александров, А. А. Нестеров, Н. П. Филиппова Институт автоматики, электрометрии
МПК / Метки
МПК: G05B 17/00
Метки: воздействия, управляющего, формирования
Опубликовано: 01.01.1970
Код ссылки
<a href="https://patents.su/3-276207-sposob-formirovaniya-upravlyayushhego-vozdejjstviya.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования управляющего воздействия</a>
Система оптимизации управления непосредственно и косвенно управляемыми объектами

Номер патента: 1080117
Опубликовано: 15.03.1984
Автор: Попов
МПК: G05B 13/02
Метки: косвенно, непосредственно, объектами, оптимизации, управляемыми
...й Ч и передаются в блок задания1 К,1 ытекущего направления напряженности поля потерь 9, Сформированные в блоке задания текущего направления на пряженности поля потерь 9 задающие сигналы направления изменения текущего состояния параметров потерь Впоступают с выхода блока задания текущего направления напряженности поля потерь 9 в блок задания напря 38женности поля потерь 10. В блоке задания напряженности поля потерь 1 О формируется значение текущей напряженности пространства потерь косвенно управляемого объекта и передается с первого выхода непосредственно или покомпонентно в вице значений параметров 6 и Х В " В на первый входк дк 1блока оценки ожидаемого приращения потерь 11. Связь второго выхода блока задания напряженности поля Потерь...
Устройство формирования управляющего сигнала для поворота вращающихся объектов

Номер патента: 1451642
Опубликовано: 15.01.1989
Автор: Петров
МПК: G05B 11/00
Метки: вращающихся, объектов, поворота, сигнала, управляющего, формирования
...если -(х -хФ а = х -х+2, если х - х" юФ 4 Ф.йх -х, если х - х,Из этой записи следует, что если% + меньше - , то к линейной разности добавляется 2, а если больше" отнимается 2.Такой способ получения рассогласования улучшает качество процесса регулирования, Рассогласованием между двумя угловыми положениями на окружности является число по модулю,равное кратчайшей дуге между двумяположениями, с положительным знаком,если кратчайший переход от текущегок заданному происходит против часовой стрелки (положительное направле"ние) и с отрицательным знаком, есликратчайший переход происходит по часовой стрелке,Пусть х+ )О. Пока х ) О и дажекогда х О, но хх - линейнаяразность хф " х отвечает своему назначению: знак рассогласования положителен и...
Способ автоматической оптимизации инерционных управляемых объектов

Номер патента: 492853
Опубликовано: 25.11.1975
Автор: Гурович
МПК: G05B 13/02
Метки: автоматической, инерционных, объектов, оптимизации, управляемых
...Ыв точке Е при х = х, где х - выЗВ ЗВчисленное значение входного воздействия,соответствующее экстремальному значени.выходного воздействия объекта у проЗИ / 20водится отключение исполнительного механизма входного воздействия.На графике (см. фиг. 3) двух моделир -,ющих входное воздействие объекта сигнал в ,М /х/ и М /х/ точки х, х и х соотв т-Ю1 2 3ствуют точкам реверса х, х . и х соотл й С., Д,ветственно, точка х соответствует точ-;,ке х . Значение сигнал М /х / ввиду1 ЗВлинейной зависимости от входного воздейс -вия х соответствует среднему /средневзвещенному/ значению х относительно его зн -чений, соответствующих точкам реверса.Способ реализуется следующим образомЗЬПолагаем, что движение по ЗСХ привключении исполнительного механизма...
Управляющий объектив шахтного видеопередающего устройства
Номер патента: 1228555
Опубликовано: 20.01.2000
Авторы: Гейхман, Гуреев, Онищенко, Рафалович
МПК: E21C 35/24
Метки: видеопередающего, объектив, управляющий, устройства, шахтного
1. Управляющий объектив шахтного видеопередающего устройства, включающий последовательно соединенные объектив, гибкий светопроводящий кабель с разрешающим световодом, снабженным входным и выходным фланцами, и тросиковый привод изгиба кабеля, причем светопроводящий кабель снабжен защитной оболочкой и расположенными в последней соосными и осесимметричными отверстиями для тросиков привода изгиба кабеля, при этом последний выполнен с возможностью изгиба в двух взаимно перпендикулярных плоскостях путем дифференциального изменения длины каждой из двух пар осесимметрично расположенных тросиков, каждый из которых закреплен одним концом на входном фланце световода, а другим - соединен с приводом...
Управляемый источник биполярного эталонного сигнала

Номер патента: 1335964
Опубликовано: 07.09.1987
Автор: Малов
МПК: G05F 1/585
Метки: биполярного, источник, сигнала, управляемый, эталонного
...1 О с высоким дифференциальным сопротивлением и чет. вертый ключ 4 оказывается подключенной к источнику,8 отрицательного напряжения, и через нагрузку 9 протекает стабилизированный ток отрицательного направления. Потенциал на входах и выходе ОУ 1 относительно общейшины отрицателенТаким образом, изменение направления тока через нагрузку 9 не приводит к изменению направления тока через активный двухполюсник 10, свойства которого и определяют номинал стабилизированного тока нагрузки. положительного и отрицательного направлений. Контур стабилизации .тока через активный двухполюсник 10 замыкается через выход ОУ 11, вход и выход регулирующего элемента 12, резистор 13, источник 15 опорного напряжения, резисторы 14 и 16 и дифференциальные...
Предыдущий патент: Самонастраивающееся корректирующее устройство
Следующий патент: Способ импульсного автоматического регулирования объектов
Случайный патент: Устройство токоподвода к транспортному средству