Система программного управления для пневмогидравлических приводов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1657773
Авторы: Бельферман, Вайсблат, Викутан, Комков, Кочиони, Новик, Черкашенко
Текст
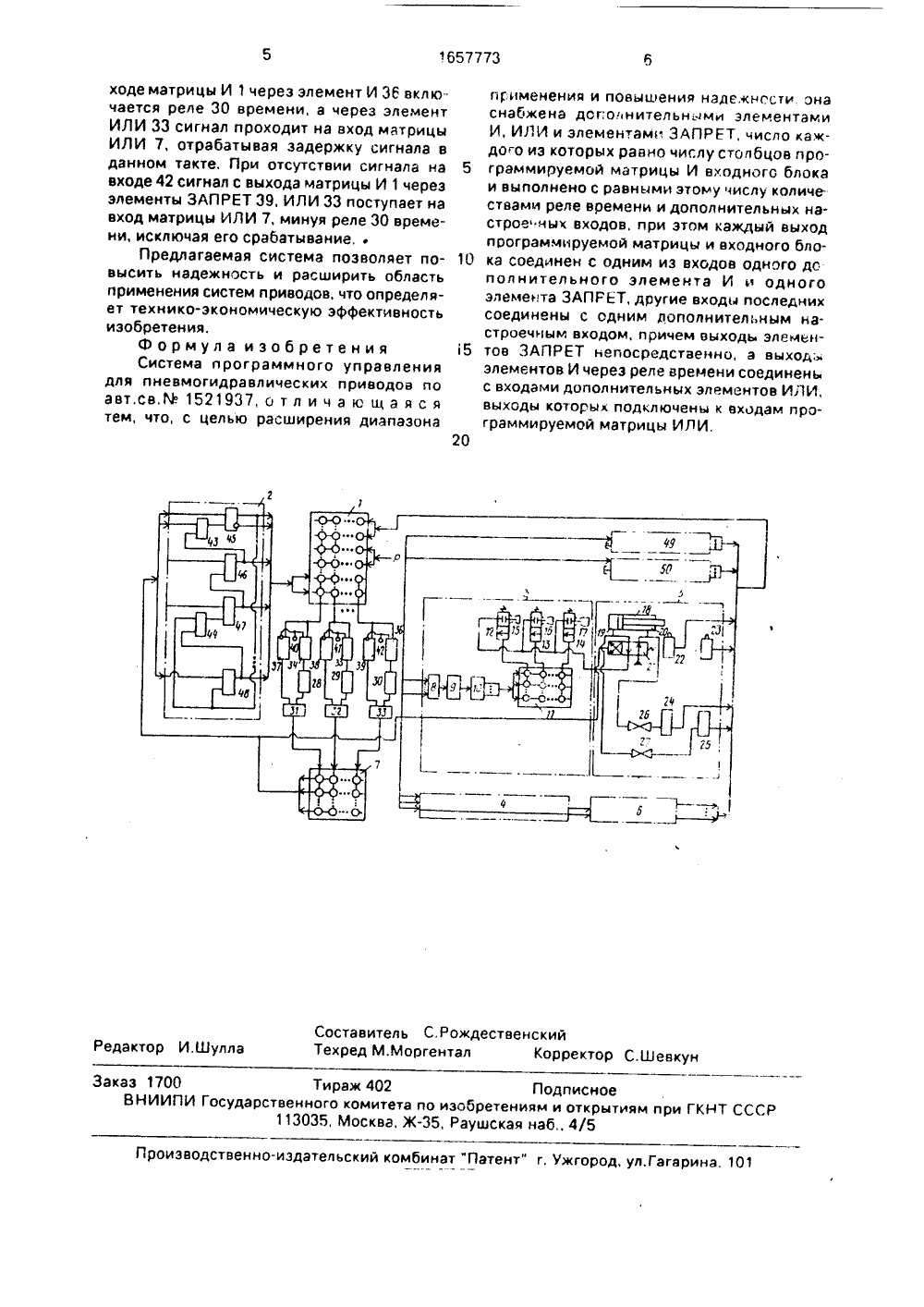
(71) Всесоюзный научни проектно-конструктмышленных гидропри 3о-исследовательскийорский институт проводов и гидроавтомаопневмозовано в ндов и яв- бретения расшире- вышение т исполнилиндр 18, кючен четы- , конечные оложениях последоваоды кланателей 22 и системы ления для приводов ос раммиоки 3 и 4 6 и проноговхвательн ОСУДАРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМРИ ГКНТ СССР ВТОРСКОМУ СВИДЕТЕЛЬСТВ тики(57) Изобрет струкциях и изобретения кашенко, В,М,Бельферман,А,М.Новик, В,М.Викутан,Д.С,Вайсблат8.8)свидетельство СССРР 15 В 9/03, 1987,ПРОГРАММНОГО УПРАВЛЕение м.б. использовано в кон спытательных стендов. Цель - расширение диапазона при Изобретение относится к гидр автоматике, может быть исполь конструкциях испытательных сте ляется усовершенствованием изо по авт.св. М 1521937,Целью изобретения является ние диапазона применения и по надежности. На чертеже изображена схема программного управления. Система программного управ гидравлических (пневматических) содержит входной блок 1 в виде пр руемой матрицы И, регистр 2, бл управления, приводные блоки 5 и граммируемую матрицу ИЛИ 7,Блок 3 управления включает м довой элемент ИЛИ 8 и последоменения и повышение надежности системы программного управления для пневмогидравлических приводов. Число каждого элемента И, ИЛИ и элементов ЗАПРЕТ равно числу столбцов программируемой матрицы И входного блока и выполнено с равными этому числу количествами реле времени и настроечных входов, Каждый выход программируемой матрицы И входного блока соединен с одним иэ входов одного дополнительного элемента И и одного элемента ЗАПРЕТ, другие входы последних соединены с одним дополнительным настроечным входом. Выходы элементов ЗАПРЕТ непосредственно, выходы элементов И через реле времени соединены с входами дополнительных элементов ИЛИ, выходы к-рых подключены к входам программируемой матрицы ИЛИ, 1 ил. установленные на его выходе генератор 9 импульсов, обегающее устройство 10, дополнительную программируемую матрицу И 11 и двухлинейные распределители 12 - 14, на выходах последней соединенные со сливом через дроссели 15 - ; 17.Приводной блок 5 включаетельный двигатель, например циполостям 19 и 20 которого подклрехлинейный распределитель 21выключатели 22 и 23 в крайних ицилиндра 18, клапаны 24 и 25тельности и вентили 26 и 27. Выхнов 24 и 25 и конечных выключа23 подключены к входам блока 1,Реле 28 - 30 времени, количество которых равно количеству столбцов матрицы И входного блока 1, установлены между до 165777310 15 20 25 30 35 40 45 50 полнительными элементами ИЛИ 31 - 33, И 34 - 36 и ЗАПРЕТ 37 - 39, число элементов каждого типа равно числу столбцов матрицы И блока 1. Каждый ее выход соединен с одним из входов элементов И 34 - 36 и ЗАПРЕТ 37 - 39, другой вход дополнительных элементов И 34 - 36 и инверсные входы элементов ЗАПРЕТ 37 - 39 соединены между собой и с дополнительными настроечными входами 40 - 42, выходы элементов ЗАПРЕТ 37 - 39 непосредственно, а выходы дополнительных элементов И 34 - 36 через реле 28 - 30 времени раздельно соединены с входами дополнительных элементов ИЛИ 31 - 33, выходы каждого из последних раздельно соединены с входами матрицы ИЛИ 7.Матрица ИЛИ 7 подключена выходами к регистру 2 и управляющему входу распределителя 21, соединенного со сливом через распределители 12 - 14, а полости 19 и 20 связаны через вентили 26 и 27 с клапанами 24 и 25.Регистр 2 выполнен с первым и вторым логическими элементами ИЛИ 43 и 44 и по меньшей мере четырьмя триггерами 45 - 48, выходы которых соединены с входами блока 1. Элементы ИЛИ 43 и 44 соединены выходами с отключающими входами триггеров 45 и 47 соответственно, одним входом - с выходами триггеров 46 и 48, другой вход элемента ИЛИ 43 подключен к выходу матрицы ИЛИ 7, а элемента ИЛИ 44 - к выходу триггера 45.Блок 1 соединен с внешними входными устройствами (не показаны), от которых поступают сигналы "Р", Блок 4 управления и приводной блок 6 выполнены аналогично блокам 3 и 5 соответственно, Кроме того, система может содержать дополнительные приводные блоки 49 и 50, аналогичные блоку 5, непосредственно соединенные с выходом матрицы ИЛИ 7 (без блоков управления).Система программного управления для гидравлических (пневматических) приводов работает следующим образом,Контроль отработки исполнительным двигателем 18 сигналов по положению осуществляется конечными выключателями 22 и 23, по времени - после включения одного из реле 28 - 30 времени и наличию сигнала с выхода соответствующего конечного выключателя 22, по давлению - после открытия вентиля 26 и снятия питания с соответствующего конечного выключателя.Управление по циклу осуществляется следующим образом, Сигналы от внешних устройств и устройств, контролирующих движение исполнительного двигателя 18, поступают на входы блока 1, в котором формируются конъюнкции, выполняющие в соответствии с программой функции, отражающие условия переходов системы. Сигналы с выходов входного блока 1 поступают на входы матрицы ИЛИ 7, где формируются дизьюнкции сформированных в блоке 1 конъюнкций, указывающие на многократное срабатывание одних и тех же исполнительных двигателей в цикле. Сигналы с выхода матрицы ИЛИ 7 поступают в регистр 2, в котором каждый предыдущий триггер 45 и 47 отключается сигналом с выхода последующего триггера 46 и 48 и включается сигналами с выходов матрицы ИЛИ 7.Сигналы с выходов регистра 2 поступают на соответствующие входы входного блока 1. Регистр 2 в совокупности с матрицами 1 и 7 формируют очередной цикл работы исполнительных двигателей, Наличие элементов ИЛИ 4 Э и 44 с третьей до предпоследней ячейки регистра 2 позволяет реализовать цикл с любым числом внутренних состояний системы,Регулирование параметров движения цилиндра 18 производится следующим образом. Сигналы с выходов матрицы ИЛИ 7 поступают на вход элемента ИЛИ 8 и далее на включение генератора 9 импульсов. Каждый импульс от генератора 9 переключает на такт обегающее устройство 10, выходные сигналы от которого поступают на входы матрицы И 11, в зависимости от программы которой переключаются распределители 12 - 14, выходы которых соединены между собой, Если включены все распределители 12 - 14, управляющиеся от одной матрицы И, то цилиндр 18 перемещается с максимальной скоростью. Положение, в котором выключены распределители 12 - 14, соответствует отсутствию движения двигателя, Все возможные другие комбинации включений распределителей 12 - 14 в различные моменты времени регулируют закон движения цилиндра 18,Дроссели 15 - 17 установлены для получения различных значений эффективных площадей (число значений 2",и - число распределителей 12 - 14) и подбираются так, что эффективная площадь линии, в которой установлен следующий по порядку дроссель, в два раза больше площади линии, в которой установлен предыдущий дроссель. Управление блоками 49 и 50 осуществляется сигналами, поступающими на управляющие входы их распределителей (аналогичных распределителю 21) от матрицы ИЛИ 7. Контроль отработки сигналов цилиндром 18 по времени осуществляется путем подачи сигналов на настроечные входы 40 - 42. При наличии сигнала на соответствующем входе (40 - 42) и соответствующем вы1 б 57773 Составитель С.РождественскийТехред М.Моргентал Корректор С.Шевкун Редактор И.Шулла Заказ 1700 Тираж 402 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб,. 4/5 Производственно-издательский комбинат "Патент" г, Ужгород. ул.Гагарина. 101 ходе матрицы И 1 через элемент И Зб включается реле 30 времени, а через элемент ИЛИ 33 сигнал проходит на вход матрицы ИЛИ 7, отрабатывая задержку сигнала в данном такте. При отсутствии сигнала на 5 входе 42 сигнал с выхода матрицы И 1 через элементы ЗАПРЕТ 39, ИЛИ 33 поступает на вход матрицы ИЛИ 7, минуя реле 30 времени, исключая его срабатывание,Предлагаемая система позволяет по высить надежность и расширить область применения систем приводов, что определяет технико-экономическую эффективность изобретения.Формула изобретения 15 Система программного управления для пневмогидравлических приводов по авт,св М 1521937, о т л и ч а ю щ а я с я тем, что, с целью расширения диапазона20 применения и повышения надежности она снабжена дог,олнительными элементами И, ИЛИ и элементами ЗАПРЕТ, число каждого из которых равно числу столбцов программируемой матрицы И входного блока и выполнено с равными этому числу количествами реле времени и дополнительных настрое нык входов, при этом каждый выход программируемой матрицы и входного блока соединен с одним из входов одного до полнительного элемента И и одного элемента ЗАПРЕТ, другие входы последних соединены с одним дополнительным настроечным входом, причем выходь элементов ЗАПРЕТ непосредственно, а выход; элементов И через реле времени соединень с входами дополнительных элементов ИЛИ, выходы которых подключены к входам программируемой матрицы ИЛИ,
СмотретьЗаявка
4487326, 28.09.1988
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ ИНСТИТУТ ПРОМЫШЛЕННЫХ ГИДРОПРИВОДОВ И ГИДРОАВТОМАТИКИ
ЧЕРКАШЕНКО МИХАИЛ ВЛАДИМИРОВИЧ, БЕЛЬФЕРМАН ВЛАДИМИР МИХАЙЛОВИЧ, КОЧИОНИ ВАЛЕРИЯ ОЛЕГОВНА, НОВИК АНАТОЛИЙ МИХАЙЛОВИЧ, ВИКУТАН ВЛАДИМИР МИХАЙЛОВИЧ, КОМКОВ БОРИС КОНСТАНТИНОВИЧ, ВАЙСБЛАТ ДАВИД САМСОНОВИЧ
МПК / Метки
МПК: F15B 11/12, F15B 9/03
Метки: пневмогидравлических, приводов, программного
Опубликовано: 23.06.1991
Код ссылки
<a href="https://patents.su/3-1657773-sistema-programmnogo-upravleniya-dlya-pnevmogidravlicheskikh-privodov.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления для пневмогидравлических приводов</a>
Устройство для управления подключением резервных блоков

Номер патента: 947865
Опубликовано: 30.07.1982
Авторы: Горшков, Комаров, Савватеев, Штейнберг
МПК: G06F 11/20
Метки: блоков, подключением, резервных
...элемент ИЛИ 11 поступает на первый вход первого элемента И 6, на выходе которого также присутствует сигнал 35 логического ф 01. Этот сигнал поступает на первые входы Запуск преобразователей напряжения 5-5, вследствие чего на иннерсных выходах преобразователей напряжения 5- 40 5 в исходном состоянии появляются сйгналы логической 1. Эти сигналы поступают на входы второго элемента И 7, на выходе которого также присутствует сигнал логической1 который приходит на входы элемента ИЛИ-НЕ 10 и элемента 9 задержки. Поэтому на выходе элемента ИЛИ-НЕ 10 и на К-входах триггеров 12 -12 через время задержки Т появится сигнал логического 0 ф, Сигнал логической 1 с выхода каждого из преобразователей напряжения 5-5поступает также на первый вход...
Система слива за борт судна моечных, балластных и льяльных вод

Номер патента: 1060533
Опубликовано: 15.12.1983
Авторы: Гринек, Дымент, Журавлев, Калинин, Кушель, Овчинников, Павлов, Попов, Соколов, Сорин
МПК: B63B 13/00
Метки: балластных, борт, вод, льяльных, моечных, слива, судна
...блоком 11 и выходом элемента НЕ 30, вход которого также подключен к вычислительно-логическому блоку 11, а вы- О ход - к блоку 31 реле времени. Реле 32, 33 времени блока 31 связаны выходами с логическим блоком ИЛИ 24.Блок 29 формирования команд состоит из реле 34, 35 времени, которые своими выходами связаны с элементом 36 ЗАПРЕТ, 5 а входами - с выходом элемента ИЛИ 37, первый вход которого подключен. к входу элемента ИЛИ 38 через элемент 39 ЗАПРЕТ, запрешаюший вход которого связан с выходом элемента И 40. Второй вход элемента ИЛИ 37 подключен к входу элемента И 41 непосредственно, а к гыходу элемента ИЛИ 42 через элемент ЗАПРЕТ 43, запрещающий вход которого подключен к выходу элемента И 41 и входу элемента ИЛИ 38. Вторые входы...
Устройство для управления загрузкой бункеров

Номер патента: 1144955
Опубликовано: 15.03.1985
МПК: B65G 65/30, G01G 13/02
...а других регистров сдвига и реверсивных коммутаторов - первыми дополнительными входами блока, одноименные входы первых узлов ключевых элементов соединены параллельно и являются третьими входами блока.На чертеже представлена функциональная схема устройства для управления загрузкой бункеров.Устройство содержит датчики 1, ,1, 1 л и 2 2 ю, 2 у, 2 л соответственно нижнего и верхнего уровней, установленные в бункерах А,А, ВВ(показаны две технологические группы бункеров, каждая .из которых представлена первым и последним бункерами, причем как число групп, так и число бункеров в них может быть произвольным) . Каждая группа бункеров предназначена для загрузки сырья определенного вида. Датчики11, 1.1 и и 2 2 1, 22 и подключены соответственно к...
Устройство для управления обменом эвм с периферийными устройствами

Номер патента: 1633413
Опубликовано: 07.03.1991
МПК: G06F 13/00
Метки: обменом, периферийными, устройствами, эвм
...отводимых для подобласти адресов периферийных устройств.Если адрес на адресной шине ЭВМ в режиме Ввод принадлежит области адресов, занимаемой постоянным запоминающим блоком 1, исключая адреса периферийных устройств, то происходит чтение информации из постоянного запоминающего блока 1.11 ри этом сигнал на выходе селектора 4 адреса блока 2 дешифрации адреса запрещает прохождение сигналов выборки через группу 5 элементов И блока 2 дешифрации адреса на входы выборки периферийных устройств, а его инверсия, поступающая с выхода элемента НЕ 6 на первый вход элемента И 7 блока 2 дешифрации адреса, и активный сигнал Чтение на втором входе элемента И 7 обеспечивают формирование сигнала на выходе элемента И 7 блока 2 дешифрации адреса, который...
Устройство для управления загрузкой бункеров

Номер патента: 709483
Опубликовано: 15.01.1980
Авторы: Данилов, Избаш, Сметана, Уткин, Феофилов
МПК: B65G 65/30
...то на правый вход двигателя 29 подается нуль, а на левый вход благодаря элементу 22 НЕ - единица, и исполнительный механизм переводится в положение "загрузка". Одновременно единица с выхода элемента 22 Н Е, проходя через элементы 23 и 24 ИЛИ, запрещает перевод исполнительных механизмов следующих бункеров в полокение фзагрузка",При заполнении бункера 1 до нижнего уровня на выходе датчика 2 появляется ециница, которая проходит через элемент 8 ИЛИ, и поэтому на выходе элементов 12 и затем 17 И появляется единица. Эта единица подается на входы элементов 7 и 8, приводя в действие обратную связь. Очевидно, при воздействии обратной связи на выходе элемента 12 И сохраняется единица, даже в случае отсутствия на выходах датчиков 1 и 2...
Предыдущий патент: Волновой обменник давления
Следующий патент: Двухпозиционный распределитель
Случайный патент: Приспособление к посадочной машине для нарезки