Механизм поворота рабочего органа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
СОЮЗ СОВЕТСКИХСОЦИАЛ ИСТИЧЕСНИХРЕСПУБЛИК ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР ОПИСАНИЕ А ВТОРСКОМУ С ИЗОБРЕТЕН ТЕЛЬСТ 4 объединение ИрН. Тутурин ьство СССР3/44, 1972,ОРОТА РАБОЧЕГО ится к металлурги- а именно к устройя чушек, для рав(21) 4458784/11(57) Изобретение относческому оборудованию,ствам для пакетирован ЯО 1641750(51)5 В 65 б 57/О шения в пакете которых зиционный поворот вокруг на угол, равный 90(и - 1), вый номер ряда в пакете, я - расширение функционостей путем обеспечения ванных положений рабоэтого задание положения вается путем поворота свяом двухручьевого барабаом перетягивания гибкого двухштоковыми силовыми11 при их попеременном номерного разме нужен четырехпо вертикальной оси где и - порядко Цель изобретени нальных возмож четырех фиксиро чего органа. Для захвата обеспечи занного с захват на 15 посредств органа 13 двумя цилиндрами 10 и включении. 2 ил.5 10 15 20 25 Изобретение относится к металлургическому оборудованию, а именно к устройствам для пакетирования чушек, для равномерного размещения в пакете которых нужен четырехпозиционный поворот вокруг вертикальной оси на угол, равный 90(и - 1), где и - порядковый номер ряда в пакете.Цель изобретения - расширение функциональных возможностей путем обеспечения четырех фиксированных положений рабочего органа.На фиг. 1 схематично изображен чушкоукладчик, вид сверху; на фиг, 2 - в изометрии кинематическая схема механизма поворота рабочего органа.Механизм использован в чушкоукладчике, который содержит механизм 1 для формирования ряда чушек 2, стойку, наверху которой расположен механизм перемещения захвата 3 ряда чушек 2, выполненный, например, в виде поворотного рычага 4. Для привода плавного поворота его предусмотрен, например, кривошипно-кулисный механизм. В крайних положениях механизма ось ,ривошипа 5 составляет прямой угол с осью кулисы 6, жестко связанной с рычагом 4, ,и л я привода кривошипа 5 предусмотрен, например, пневмоцилиндр 7, На консольном конце рычага 4 расположен механизм подьгма-опускания захвата 3, выполненный, напримерв виде вертикально расположенного пневмоцилиндра (не показан), на конце штока которого поворотно вокруг вертикальной оси 8 закреплен захват 3 ряда чушек 2. Захват 3 закреплен на механизме 9 поворота, выполненном в виде двух двухштоковых силовых цилиндров 10 и 11, у которых на концах штока другого цилиндра 10 расположены обводные блоки 12, а на концах пггока другого цилиндра1 закреплены концы отрезка гибкого органа (каната) 13. Канат 13 огибает обводные блоки 12, направляющие блоки 14 и двухручьевой барабан 15, Середина каната 13 закреплена в промежутке 16 между ручьями. Двухручьевой барабан 15 кинематически связан с захватом 3 жестко от проворачивания и свободно от перемещения в вертикальном направлении. Выполнено это, например, в виде направляющей 17, принадлежащей двухжелобковому блоку, и штанги 8, принадлежащей захвату 3. Величина хода каждого пневмоцилиндра 10 и 1 равна четверти развернутой длины окружности каната 13 на двухручьевом барабане 15, т. е. ход цилиндра 10 преобразуется в поворот барабана 15 на 180 и ход цилиндра 11 - в поворот на 90. При использовании этого чушкоукладчика для формирования из чушек пакетов захват закрепляют со смещением а от оси поворота в механизмах 9 поворота, равным половине размера величины наклона боковой поверхности чушки, т. е. величине смещения рядов чушек в пакете 19 от его оси. 30 35 40 45 50 55 При использовании чушкоукладчика для формирования пакетов, не именщих смещения рядов от оси пакета, захват закрепляют соответственно без смещения.На позиции укладки пакета в чушкоукладчике установлен конвейер 20, который в разливочных машинах является одновременно технологическим конвейером-накопителем дискретной подачи. Для формирования на конвейере используют его, например, первую позицию, а последующие позиции используют для осмотра пакетов, обвязки, взвешивания и для задела готовых пакетов.Чушкоукладчик работает следующим образом.После окончания формирования ряда 2 по сигналу с устройства 1 включаются в работу механизмы по укладке ряда 2 с механизма 1 в пакет 19. Механизм подъема- опускания опускает захват 3, который захватывает сформированный ряд чушек и поднимается. После этого включается механизм перемещения захвата и перемещает захват 3 с чушками над конвейером 20.Механизм подъема-опускания опускает захват 3 с чушками на конвейер 20, если это первый ряд, либо на предыдущие ранее уложенные ряды. Далее захват 3 разжимается, поднимается без чушек, и возвращается в исходное положение, где механизмы ожидают сигнала для следующего включения. Механизм поворота 9 захвата 3 работает в процессе перемещения захвата 3 с чушками из исходного положения к позиции укладки следующим образом: укладка первого, пятого, девятого и т. д. рядов выполняется без включения механизма поворота, т, е. захват 3 сохраняет свое первоначальное положение относительно рычага 4; укладка второго, шестого, десятого и т. д. рядов выполняется с поворотом в плане против часовой стрелки на 90, для чего включаются оба цилиндра 10 и 11; укладка третьего, седьмого и т. д. рядов выполняется с поворотом в плане против часовой стрелки на 180, для чего включается один цилиндр 1 О; укладка четвертого, восьмого и т. д. рядов должна выполняться с поворотом на 270 в плане против часовой стрелки. Однако в целях сокращения углового пути захват поворачивается из исходного положения в плане по часовой стрелке на ( - 90), для чего включается один цилиндр 11, что дает тот же результат за меньшее время.При движении захвата 3 от позиции укладки в исходное положение соответствующие цилиндры 10 и 11 восстанавливают своим обратным ходом захват 3 из повернутого в исходное положение.После укладки в пакет последнего ряда в конце подъема пустого захвата от законченного пакета включается конвейер 20 и перемещает пакет на шаг на следующую1641750 формула изобретения Составитель Е. 3Техред А. КравчукТираж 480о комитета по изобретениМосква, Ж - 35, Рву шскьский комбинат Патент Редактор О. СпесивыЗаказ 1119 ВНИИПИ Государственно113035,Производственно-издате позицию, а следующая пустая подставка конвейера 20 приходит на первую позицию для формирования на ней следующего пакета. Перемещение конвейера 20 на шаг происходит за время движения захвата за первым рядом чушек следующего пакета, в результате чего сохраняется непрерывность работы чушкоукладчика. Механизм поворота рабочего органа, преимущественно захвата чушкоукладчика, содержащий раму с закрепленными на ней двухштоковым силовым цилиндром и двухручьевым барабаном, связанным с рабочим органом, и закрепленным на оси поворота последнего обводной блок и огибающий его и двухручьевой барабан гибкий орган, закрепленный своими концами на штоках силового цилиндра, отлицающийся тем, что, с целью расширения функциональных возможностей, путем обеспечения четырех фиксированных положений рабочего органа, механизм снабжен вторым обводным блоком и закрепленным на раме дополнительным, ориентированным параллельно первому, 10 двухштоковым силовым цилиндром, при этомкаждый из упомянутых обводных блоков закреплен на конце соответствующего штока дополнительного силового цилиндра, а гибкий орган последовательно огибает первый 15обводной блок, двухручьевой барабан, второй обводной блок. мрикинаКорректор Т. МазепПодписноем и открытиям прп ГКНТ СССРя наб., д. 4,5г. Ужгород, уд. Гагарина. 0
СмотретьЗаявка
4458784, 11.07.1988
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ИРКУТСКТЯЖМАШ"
ШИШЕЛОВ БОРИС ИВАНОВИЧ, ТУТУРИН ЛЕОНИД НИКОЛАЕВИЧ
МПК / Метки
МПК: B65G 57/08
Метки: механизм, органа, поворота, рабочего
Опубликовано: 15.04.1991
Код ссылки
<a href="https://patents.su/3-1641750-mekhanizm-povorota-rabochego-organa.html" target="_blank" rel="follow" title="База патентов СССР">Механизм поворота рабочего органа</a>
Механизм поворота захвата стрелы

Номер патента: 242035
Опубликовано: 01.01.1969
МПК: B65G 61/00, B66C 1/00
Метки: захвата, механизм, поворота, стрелы
...через ползун 3, вмонтированный в направляющие 4, соединен с 20 тяггой 5, шарнирно скрепленной с нижней челюстью 6 захвата.Монтируется механизм поворота захвата на стреле 7 базовой машины 8, например, лесопогрузчика, На стреле смонтирована,непод вижная упорная челюсть 9, Стрела 7 имеет возможность поворота в гвертикальной плоскости гпри помощи гидропривода 10.Механизм поворота захвата стрелы работает следующим образом. 30 Ходом машины 8 подводят захватную нижнюю челюсгь 6 под груз. При включении цилиндра 1 челюсти 6 на закрытие одновременно с его штоком 2 перемещается ползун 1 по направляющим 4. Тяга гг, соединенная шарнирно с ползуном 3 и с захваГпой челюстью 6, поворачивает последнюю до упора груза в упорную челюсть 9. После этого...
Механизм поворота захвата стрелы

Номер патента: 273727
Опубликовано: 01.01.1970
МПК: B65G 61/00
Метки: захвата, механизм, поворота, стрелы
...захвата.Цель изобретения - уменьшение усилий, воздействующих в процессе работы на направляющие, и увеличение угла поворота нижней челюсти захвата. Достигается это тем, что нижняя челюсть захвата выполнена с опорной поверхностью, взаимодействующей в процессе работы с ползуном штока силового цилиндра.На чертеже показан предлагаемый механизм.Механизм состоит из гидроцилиндра 1, шарнирно укрепленного на стреле 2, шток которого также шарнирно соединен с ползуном 3 и тягой 4. Тяга в свою очередь соединена с рычагом нижней челюсти 5, выполненной с опорной поверхностью А, на которую опирается ползун, передающий усилие на рычаг. 5 Работает механизм следующим образом.При подаче масла в магистраль к цилиндрам захвата оно, заполняя штоковую полость...
Устройство для поворота захватов

Номер патента: 1664715
Опубликовано: 23.07.1991
Авторы: Лабковский, Лукьянец, Саркисов
МПК: B66C 1/00
...колес 4 и 5устанавливаются звездочки 12 и 13, а вместо зубчатого венца 6 - цепь 14, закрепленная на цилиндрической поверхности,Устройство с цепной передачей (фиг.3)работает аналогично устройству с зубчатойпередачей (фиг. 1 и 2)При этом цепь 14 45выполняет функции зубчатого венца 6, чтопозволяет упростить технологию изготовления привода.Устройство работает следующим образом. 50Двигатель 3 подключен к сети постоянно и имеет скорость Чз = сопзс. Двигатель8 в зависимости от требуемого направлениявращения включается либо на первую скорость, либо на вторую (Чв или Чв), При включении на первую скорость (Ч 8) двигателя 8окружная скорость точек делительной окружности зубчатого венца 6Ч = йГ 5. Но окружная скорость тех же точек, определенная по...
Передача от оси ветряка к рабочему валу вертикального ветряного двигателя

Номер патента: 41934
Опубликовано: 28.02.1935
Автор: Шаронов
МПК: F03D 1/00, F03D 11/00
Метки: валу, вертикального, ветряка, ветряного, двигателя, оси, передача, рабочему
...приводит во вращение рабочий вал,На чертеже фиг. 1 изображает сбоку передачи от оси ветряка к ра чему валу вертикального ветрян двигателя; фиг, 2 в в сверху ее; фиг. 3 - разрез ее поАБ фиг. 1; фиг. 4 - то же по ВГ фиг. 1.Основанием ветродвигателя служит поворотный и опирающийся внизу на подпятник 1 стояк 2 с подкосами 3, несущий на себе неподвижно укрепленную головку 4 с махами о на оси б. В верхней части стояк 2 снабжен роликовым подшипником (фиг, 4), состоящим из закрепленных на стояке дисков 7 с роликами 8, катящимися по кольцу обичайки 9. На оси бветряка насажена зубчатая шестерня 10, сцепляющаяся с шестерней П на приводном передаточном валу 12, эксцентрично установленном по отношению к поворотному стояку 2. Нижний конец вала 12...
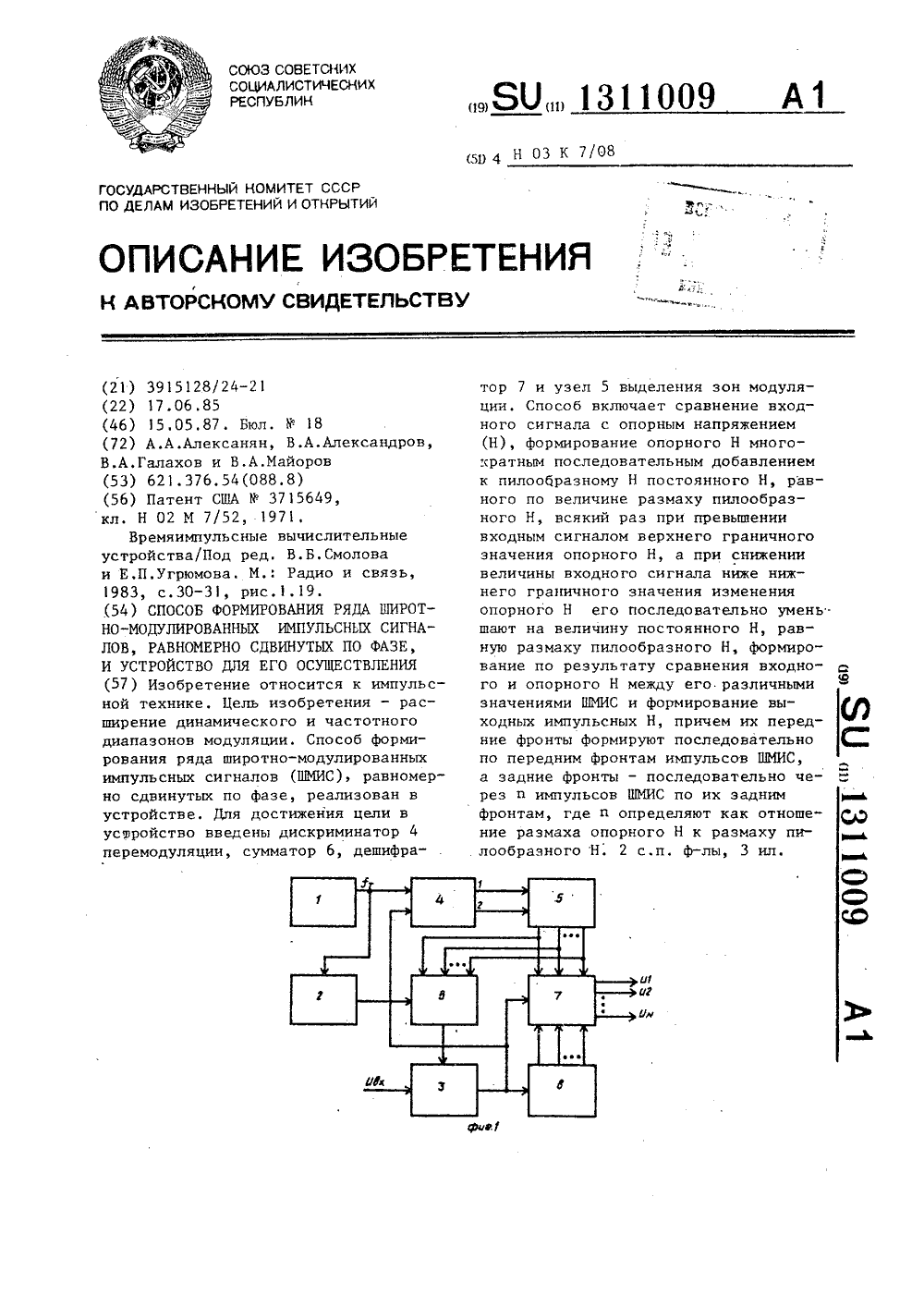
Способ формирования ряда широтно-модулированных импульсных сигналов, равномерно сдвинутых по фазе, и устройство для его осуществления
Номер патента: 1311009
Опубликовано: 15.05.1987
Авторы: Александров, Алексанян, Галахов, Майоров
МПК: H03K 7/08
Метки: импульсных, равномерно, ряда, сдвинутых, сигналов, фазе, формирования, широтно-модулированных
...выполнен (фиг.З) на элементе задержки на интервал С Т ( 001 Т) и логических элементах.Устройство выделения зон модуляции предназначено для последователь 5 ного формирования на Ивыходе единичных потенциалов (фиг.2.5-2.7)при увеличении опорного напряжения (формирование первого импульсного сигнала фиг.2.3 дискриминатором 4) При 10 уменьшении опорного напряжения (формирование импульсного сигналафиг.2.4) выходные шины узла 5 выделения эон модуляции последовательно обнуляются (фиг.2.5-2.7) Эти напря жения поступают на входы сумматора 6, выходное пилообразное напряжение которого изменяется от Чд(п) доУзел 5 выделения зон модуляции может быть выполнен (фиг.З) на Б 5-триггере, (М) 0-триггерах и логических элементах.Кольцевой регистр 8 сдвига...
Предыдущий патент: Способ подготовки глиносодержащих зернистых материалов к гидротранспортированию
Следующий патент: Устройство для укладки плоских изделий в стопу
Случайный патент: Штамп для штамповки эластичной средой