Прямолинейно направляющий механизм
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
(21) (22) 2) арпу и В,(53 ) (56) рова - М, рис. (54) ИИЗМ (57) счет конструи приоров. с, 190,8. ЯМОЛИНЕЙНО АПРАВЛЯ 1 пЩИЙ МЕХ обретение аправляющи ится к прямолианизмам на теельным движениприменение, в отно м ме нуди айде ах ка с м атора и частинии,дежно сти,ель и танк риборостроеповьппение на ния заобрет анизь сти ме чет исключени ГОСУДАРСТВЕННЬЙ НОМИТЕПО ИЗОБРЕТЕНИЯМ И ОТНРЫТПРИ ГКНТ СССР 4492213 /25-2810.10,8823,06.90. Бюл, 1 ьЕ,А. Мороз, В.А, К, Мезен621 .836 (088,8)Плотников В.С. Раие оптико-мехапичМашиностроение,заедания сепараторов с телами каченияи упрощение его конструкции за счетзамены зубчато-реечного устройстваперемещения сепараторов на шарнирно-,рычажное, При перемещении каретки 4установленные на ней штифты 10 увлекают за собой соответствующие плечирычагов 7, другие плечи которых удерживаются на месте штифтами 10, закрепленными на корпусе 1, Рычаги 7поворачиваются вокруг этих штифтов,одновременно, скользя по ним прорезями 9, и увлекают эа собой оси 8 вращения рычагов 7, закрепленные на сепараторах 6, которые также перемешаются. Каретка 4 движется до упораосей 8 в торцы пазов 11, выполненныхв корпусе 1 и каретке 4. 1 з.п. Ь-лы,Изобретение относится к машиностроению, а именно к прямолинейно направляющим механизмам на телах качения, и может быть применено в станкои приборостроении,5Цель изобретения - повышение надежности механизма за счет исключения эаедания сепараторов с телами качения и упрощение его конструкции за 1 рсчет замены зубчато-реечного устройства перемещения сепараторов,на шарнирно - ,рычажный.На Фиг, 1 и 2 показана конструкция механизма в правом и левом крайних положениях подвижной каретки; наФиг, 3 - сечение А-Л на фиг, 1,Механизм содержит корпус 1 с вы"полненными в нем двумя параллельнымипрямолинейными. каналами 2 дляразме Ощения тел 3 качения, установленную вкорпусе 1 подвижную каретку 4 с кана.лами. 5 для размещения тел 3 качения,ответными каналам 2 корпуса 1, и установленные в каналах 2 и 5 сепараторы 6 в виде плоских пластин, Устройство синхронного принудительного перемешения сепараторов 6 выполнено в виде двух .идентичных двуплечих рычагов7, оси 8 вращения которых закреплены 3 Она соответствующих сепараторах 6,Плечи рычагов 7 имеют равную длину, вних выполнены. сквозные, прорези 9, скоторыми взаимодействуют штифты 1 О,закрепленные попарно симметрично относительно соответствующей оси 8,один - на корпусе 1, а другой в ,накаретке 4, Дпя ограничения хода каретки 4 в корпусе 1 и каретке 4 выполнены идентичные пазы 11, торцы которых взаимодействуют с размещеннымив них осями 8 вращения рычагов 7, Длина пазов 11 определена зависимостьюЬо Ь/2+6,45где Ьо - длина пазов 11;Ь - максимальная величина ходакаретки 4;д - наружный (максимальный) диаметр оси 8,50Механизм работает следующим образом,При перемещении каретки 4, например, справа налево штифты 10, закрепЯ ленные на ней,. увлекают за собой соответствующие плечи рычагов 7, Другиеплечи этих рычагов удерживаются наместе штифтами 1 О, закрепленными Макорпусе 1, а рычаги 7 поворачиваютсявокруг этих штифтов, одновременноскользя по ним.прорезями 9. В результате оси 8, расположенные точно по средине между штифтами 10, увлекаютсярычагами 7 и передают это движениесепараторам 6 вместе с телами 3 качения. При перемещении каретки 4 на величину Ь ось 8 и связанный с ней сепаратор 6 в силу симметричного расположения штифтов 10 перемешаются навеличину Ь/2. Движение каретки 4 прекращается, когда оси 8 упрутся в торцы пазов 11Формула изобретения 1, Прямолинейно направляющий механизм, содержащий корпус с двумя параллельными прямолинейными каналами, в которых размещены тела качения, установленную в корпусе подвижную кареткупредназначенными для взаимодействия с телами качения каналами, ответными каналам корпуса, установленные в соответствующих каналах два сепаратора в виде плоских пластин для тел качения и устройство синхронно принудительного перемещения сепараторов, о т л и ч а ю ш и й с я тем, что, с целью упрощения конструкции, устройство перемещения сепараторов выполнено в виде двух идентичных равноплечих рычагов, оси вращения которых установлены на соответствующихсепараторах, а в плечах выполненысквозные прорези, и двух пар штифтов,предназначенных, для взаимодействия ссоответствующими прорезями рычагов,при этом штифты каждой пары закреплены симметрично оси вращения соответствующего рычага, один - на корпусе, адругой - на каретке,2, Механизм по и. 1, о т л и -ч а ю ш и й с я тем, что, с цельюповышения надежности путем ограничения хода каретки, в корпусе и в каретке выполнены, пазы, в которых размещены оси вращения соответствующих рычагов.3 573268 Составитель В.СавицкийРедактор А,Иотьль Техред Л.Сердюкова Корректор 1,Пож Заказ 1633 раж 490 Подписное НИИПИ Госуда твенного ко 113035, Мо митета по изобретениям и открытиям и ГКНТ СССР ква, Ж, Раушская наб., д, 4/5 лр роизводственно-издательский комбинат "Патент", г, Ужгород, ул. Гагаринч 101аг,рина,
СмотретьЗаявка
4492213, 10.10.1988
ПРЕДПРИЯТИЕ ПЯ Г-4046
МОРОЗ ЕВГЕНИЙ АЛЕКСАНДРОВИЧ, КАРПУШИН ВЯЧЕСЛАВ АЛЕКСЕЕВИЧ, МЕЗЕН ВАЛЕНТИН СТАНИСЛАВОВИЧ
МПК / Метки
МПК: F16H 21/00
Метки: механизм, направляющий, прямолинейно
Опубликовано: 23.06.1990
Код ссылки
<a href="https://patents.su/3-1573268-pryamolinejjno-napravlyayushhijj-mekhanizm.html" target="_blank" rel="follow" title="База патентов СССР">Прямолинейно направляющий механизм</a>
Сепаратор высокоскоростного подшипника, базирующийся на телах качения

Номер патента: 111004
Опубликовано: 01.01.1957
Авторы: Белянчиков, Спицын
МПК: F16C 33/38
Метки: базирующийся, высокоскоростного, качения, подшипника, сепаратор, телах
...отверстия.На фиг. 1 изображен поперечный разрез подшипника с сепаратором, имеющим сферические лунки, очерченные по радиусу шариков; на фиг. 2 - сепаратор в сборе с шариками, вид сверху; на фиг. 3 - поперечный разрез подшипника с сепаратором, состоящим из двух колец, снабженных чашками из антифрикционного материала; на фиг. 4 - вид сверху на этот сепаратор ь сооре с шариками.Сепаратор, изображенный на фиг. 1 и 2, состоит из двух колец 1 и 2, выполненных из пластмассы, например текстолита. Кольца соединены друг с другом при помощи заклепок 3. У полюсов вра 1 цсния шариков 4 кольца имеют сферические лунки, очерченные по радиусу шариков. По центру лунок выполнены смазочные отверстия А.Видоизмененный сепаратор, показанный на фиг. 3 и 4,...
Устройство для изменения величины и направления тяги судового движителя

Номер патента: 880880
Опубликовано: 15.11.1981
Автор: Лавров
МПК: B63H 1/04
Метки: величины, движителя, изменения, направления, судового, тяги
...соприкасающегося одним торцом с основаниемрегулятора 8,а вторым торцом - с дномстакана 50. Контакт 48 с контактом о51 и обмоткой потенциометра 47 образуют скользящий контакт, а с контактом 51 и контактами 52 и 53 сигнального устройства создают разрывные контакты. Контакт 51 соединен спроводом 59 источника тока, контакты52 и 53 - с проводами 60 и 61 сигнализации, имеющей лампы 62 и 63, апотенциометр 47 соединен проводами64 и 65 с магнитоэлектрическим логометром 66.Движитель собирается из укрупненных узлов: регулятора, лопастей свалом и датчиков.Сборка регулятора начинается сустановки шестерни 15 с регулятором 258 и шестерни 18 с валом 19 в корпус16, который соединяют с основанием 17,а последний закреплен болтами 23 накорпусе 7...
Устройство для удаления заусенцев с зубчатых колес

Номер патента: 984745
Опубликовано: 30.12.1982
Авторы: Вилков, Козырев, Одинцов, Проскурин, Трубаев, Шестаков
МПК: B23F 19/10
Метки: заусенцев, зубчатых, колес, удаления
...каретки 5 выполнен в Виде гидроцилиндра 20 со штоком 21, Каретка 5 перемещается по направляющим 22 основания 3.1Привод 6 Вращения обрабатывающего 30 колеса 1 представляет собой гидро- цилиндр 23, шток 24 который соеди нен с реечной передачей 25, зубчатое колесо которой находится в зацеплении с зубчатым колесом 26, за крепленным на шпинделе 27, несущим колесо 1, На зубчатом колесе реечной передачи 25 размещены контакты 28 и 29 с возможностью взаимодействия с конечными выключателями 30 и 40 31, связанными с реверсным гидравлическим золотником 32, обеспечивающим Возвратно-поступательное перемещение штока 24 и рейки реечной передачи 25, т.е. реверсное враще - ние обрабатываемого колеса. Скорость протекания жидкости в гидроцилиндре...
Установка для испытания консольных образцов на изгиб

Номер патента: 1610383
Опубликовано: 30.11.1990
Автор: Лодус
МПК: G01N 3/20
Метки: изгиб, испытания, консольных, образцов
...возможностьиспытания, образцов как на изгиб, таки при совместном действии изгиба ирастяжения, что расширяет Функцио-.нальные возможности установки, 1 з.п.ф-лы 1 ил бодном конце которого закрепляют дополнительный захват 14. Иежду захва-. том 14 и упором 13 концентрично образцу б устанавливают дополнительную силовую пружину 15.Для проведения испытаний образца 6 при совместном действии изгиба и осевого растяжения в режиме динамического нагружения при помощи лебедки 4 опускают груз 3 на рычаг 2. При повороте рычага 2 ролик 5 перемещается по поверхности образца 6, при этом происходит поворот платформы 9 с захватом 12 и рычагом 10, При повороте рычага 10 пружина 8 создает усилие изгиба, которое регулируется .винтовым приводом 7. По мере...
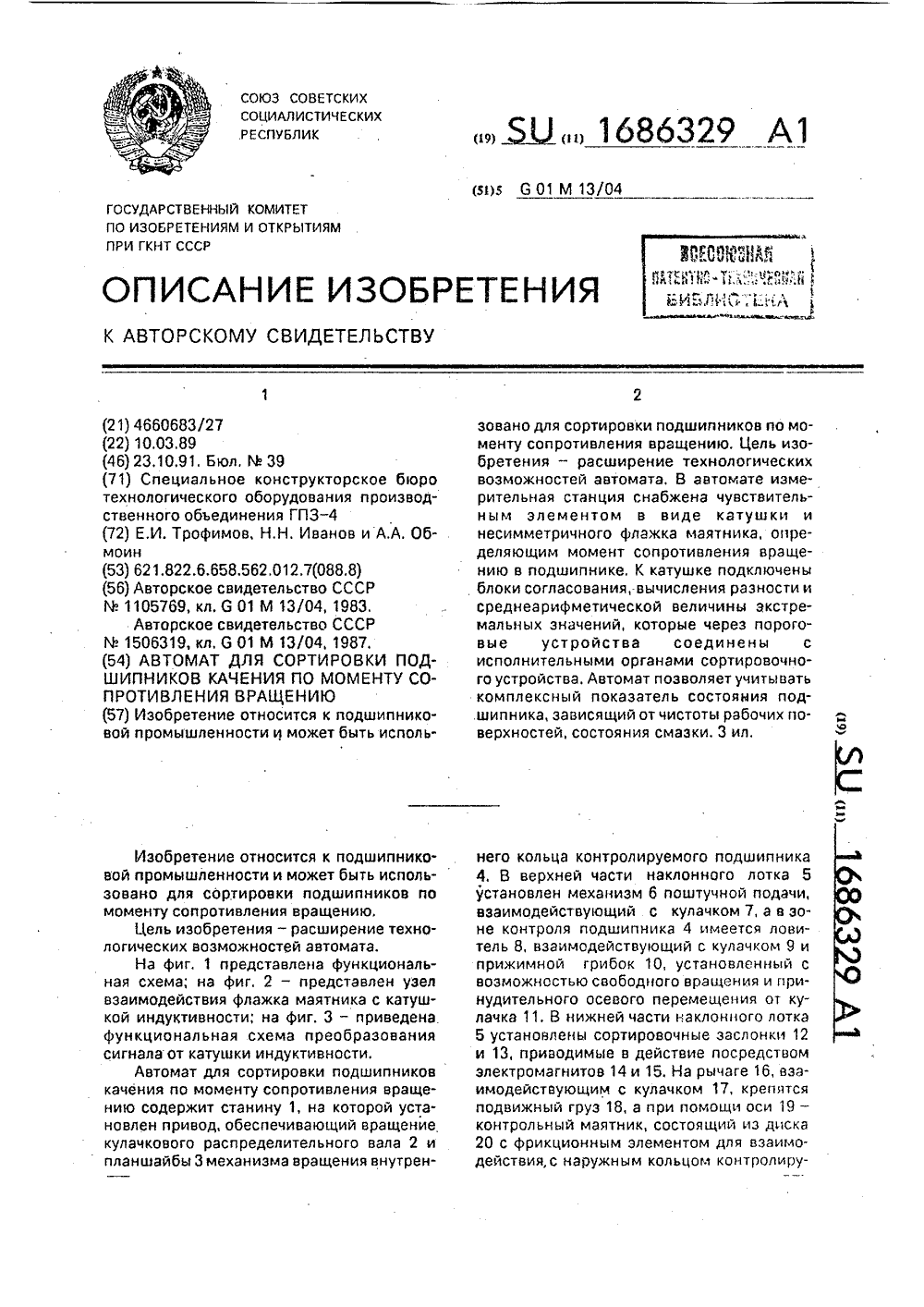
Автомат для сортировки подшипников качения по моменту сопротивления вращению
Номер патента: 1686329
Опубликовано: 23.10.1991
Авторы: Иванов, Обмоин, Трофимов
МПК: G01M 13/04
Метки: автомат, вращению, качения, моменту, подшипников, сопротивления, сортировки
...подшипник 4, где от действия кулачка 11 грибок 10, перемещаясь, центрирует и прижимает подшипник 4 внутренним кольцом к вращающейся планшайбе, При этом наружное кольцо подшипника 4 прижимается к подпружиненному ловителю 8, который выполняет дополнительную функцию тормоза наружного кольца при разгоне до рабочей скорости планшайбой 3 внутреннего кольца подшипника 4. От кулачка 17 под действием груза 4 опускается рычаг 16, на конце которого установлен контрольный маятник, до соп икосновения с наружным кольцом подшипника 4 диска 20, При этом флажок 21 маятника входит в зону взаимо-) действия с катушкой 23 индуктивности. По сле этого в результате действия кулачка 9 отводится от наружнго кольца подшипи/ ка 4 ловитель 8, В стадий контроля...
Предыдущий патент: Реечный механизм
Следующий патент: Шарнирно-рычажный направляющий механизм
Случайный патент: Устройство для измерения линейных размеров