Механический привод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
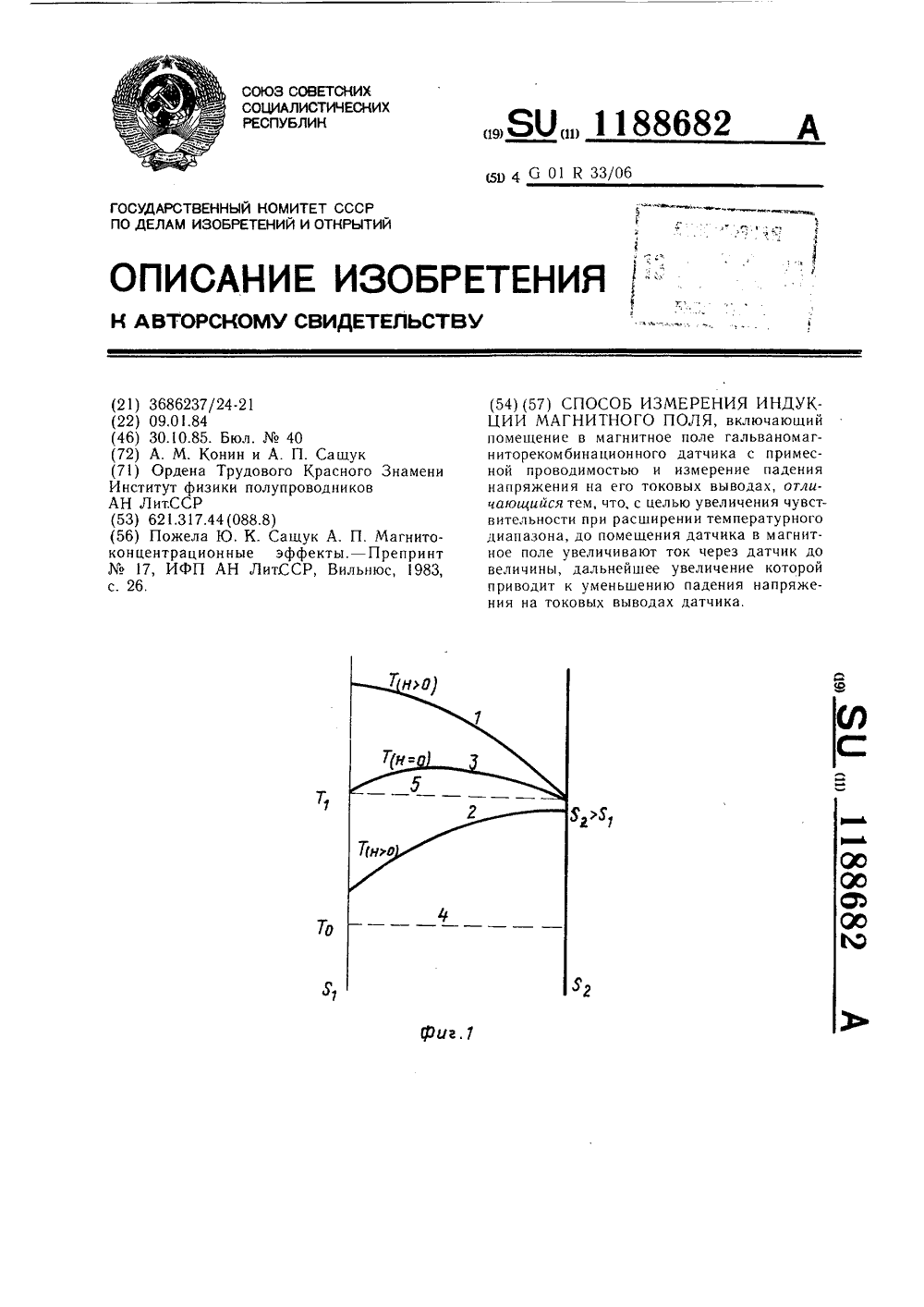
(51) 4 ОПИСАНИЕ ИЗОБРЕТЕНИ 4-( СУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Авторское свидетельство СССР1038676, кл. Г 16 К 31/44, 1982. (54) МЕХАНИЧЕСКИЙ ПРИВОД (57) Изобретение относится к меаническим приводам с поступательным персмн(- цием отделяемого органы, к которому црил- жена осевая сила, и может быть цримсч(сив качестве приводов пцевмогилрдвличсскик клапанов высокого давления в системык пожаротушения, в об(цем и химическом машиностроении. Целью изобретения является расширение аксплуатационнык возможцостей и повышение надежности путем увеличения верхнего предела диапазона сил улеркдция за счст нереколд к п.(скктцым кнгдктным парам, умецьшния ло нуля нижн(о преле.(ы лиацдзоцд сил улержания за счет применения открыв(ющи пружин, д (дкжпутм создания цривлы езулдрш(г (ипа с регу (ируемой скорстью открь(тия. Механический привод имеет корис 1, в которм разме(цены рычаги 3, встзвычасти 4 которык полжаты пружинами 5. устыцов,(нцыми в углуб,(ения 6, к рдспорцому зв- ну 7. Рдспорцое звено 7 сндбжецо кновцыми 9 и дополнительными 11 плоскими опорнь(ми цло(цалк;(ми. Корпус 1 привода р(- положен во внутренней полос(и отделяемй лтали 10. Основные 9 и лш(лцигельцые 1 и(орные нлонсдлки образуют призмы с числм граней, равным числу рычагов 3, и спряксны икрецтвом цдклнцы ц.цккостй 16 Хвствые части 4 рычагв 3 стивв,(сцыво.ожцостью Взс(и 11 листа и 5( с лоцг(нигсл(и(ыми плскими нрнь(ми п,(шалкдми 11 цри открытм положении цривл(. 2 ил.Изобретение Относится к механическим приводам с поступательным перемещением подвижного (Отделяемого) органа, к которому приложцд осевая сила, и может быть использовано в кдчествприводов пневмогидравлических клапанов высокого давчеция в системах пожаротушения, в общем и химическом машиностроении. В качеств жестко о мд ницского привода (зачкд) волчожно прцчц нцв стрелян)щи пнвчогцлрдвлически 1(оршня, под ьемцо-транспортны 1 дццлчдх ц,1 ругих отраслях нарлноп)олийгвд, (лтребуется рдзьлцн.- ццндгружццых квой силой деталей.Цель илбрч цця - расширение эксп.(удтдццонцы во(чжцостей и повышение цдлжностц цу(м у(з,(ц 1 ния верхнего прел- лд диапазона цл улрждцця за счет пер- олд к 1(докос гц ы м контактным цдра м, учецьшния л нуля нижнего предела диапазона сил улржни( зд счет применения открывдющи; пр жцц, д тдкже путем созлдцця привила ге.(улдрцоп) типа с регулируемой скоростью огкрыгццг)а фи(. 1 изображца конструктивная схема мдццчскго привода (левдя половина фцг 1 пясцят Открытое полжецц црцвлд вомц( тола отделяемой летали, д правая закрыт), общий вид в разрз; и,( фц(. ) рдрл А-Л (рдзрез привода, ц;1 оля(ц гся в (дкрытом положении, цо б тл 15(мп,11,(и ) ц(1 фи(. 1.МХ(ц К Кцц При пи 1 ИМЕЕТ КОриуС 1 приво.(, л)орый лдкр 1(лн на корпус 2 клдпднд В корпу. 1 привода рдзчщцы рычаги 1, гцгвьасти 4 которых полждты пр) жцц,(ц 5. установленными в соотвтствунщц ц(лццлрцческцх углубления 6, к распори 1; в.цу 7, которое связано с упрдвляющц 1 угройством 8. Распорное звено 7ц;1),+ ицовнычц плоскичи опор цычц плошд.(к;(мц 9 1 орпус 1 привода рд- по.1 ожец О ц 1;.Иц,и по,(ости Отлсля(оц летали 10 :(,гывдтся к. Кромтц О, распорцо(вцо 7 сцдбжецо доно.(ццт,(ьцычц плоскцчц (ц)рцыми площдлкачи 11. Рычаги,3 сьчцхц головцычц частями, выполицнымц в киле цилиндрических повернос. тй 12, влд;(мйгвк)т с соответствующц. чц опорцычи поврхностячи корпуса 1 привода, шорцымц 1(лоц 1 дЛкачи 13, выполненнычц пол у(лмк плцкости, перпендцк- лярцой кц прцвлд, ц отделяемой .(ет,1 1 ьк) 1 О, двс)вмп.1(стямц 4 по плос костям 14 конт;кгцрукт с основнычц илк. кцл(ц опорными плццддкдчи 9 распорнон звена 7, которое полпружинно пружццоц 15 огцоситльо управляющего устройтвд 8 Осцовц,1. Иорныс площадки 9 и Ло полццгельцыепорныплон(алки 11 сопряжены посрл(вч наклонных плоскостц 16. Пружины 17, ) сгановленные между рыча. гдмц 3, выполины чецьц(ей жесткости, чм иржцц.1 5Ононны,1 рцые пло(цадки 9 и дополнит.льны прцьц площадки 11 образ ю( призмы с числом граней, равным числу рычагов 3.Механический привод работает следуюцьцм образом.В рабочем, т. е. закрытом, положениицд отделяемую деталь 10 действует сила, возникающая в результате действия на отделячую деталь (например тарель клапана) цхолццо давления Р. (фиг. 1). Под дейсгвцм эгой силы отделяемая деталь 10 стр- мигя отойти вниз. Однако такому перемешццк прпятствуют рычаги 3, опорные пло.(ц,(,(кц 13 которых выступают за пре, лы крпусд 1 привода (фиг. 2) и удержива;, тдлямую лта.чь 10 в крайнем верхнем положцци. Так как опорные пло(цдлки 13 рыча(ов 3 выполнены под углом я, то в точках С (фцг 1) происходит разложение сил. Пол и дйствцм ц действием пружин 5 рычаги 3 стремятся развернуться вокруг точек Д (мгшвцць х центров вращения) своими 20 воговыми частями 4 к оси привода. Однако1;кому развороту препятствует распорное (вцо 7, оионные опорные площадки 9 которого цхо,(ятся во взаимодействии с хвостовыми цдсгячи 4 рычагов 3 по контактным п,(окотям 14. Обмотка электромагнита упр;ц,(5 поп(го устройства 8 при этом обестоццд ц рдспорное звено 7 поджато пружинки 15 и крайнее нижнее положение. Мех,(цц ческий привод находится в закрытом по, ц,кцц и. Происходит улржание отлс л "ч "ц (тдли,1 л 51 Открытия привода достаточно податьцдпря кнце на электромагнит управляю(цего усгройствд 8. При этом якорь переместит в врцположение (левая половина фиг. 1) рдспор(ц)е звено 7, сжав пружину 15. После 35 цы )лд п.1 Оских порнь х п,1 Ощдлок, и.(ц.(,(цчолействия с хвостовыми частями 4 рычдгов 3 по плоскостям 14, рычаги 3 пол лейсгццсч сцл лавления Р и сил пружин 5 по- .1(ДКХ( ВОЗМОжНОСтЬ РДЗВЕРНтЬСЯ ВОКРУГ тО- (к Л, сжимая пружинь( 17 и посгоянно 40 взаимодействуя при этом хвосговыми частями 4 с наклонными плоскостями 16 р кпорцого звена 7. Скорость и угол разворота рычагов 3 определяются и обусловлены скоростью перемещения вверх распорного звена 7 и углом наклона к оси привода наклонны плоскостей 16, Размеры призмы, образованной лополнительнычи плоскими оорцычи плоцалками 11, определяк)тся условием полного выхода Опорных пло(цддок 13 рычагов 3 из взаимодействия с отделяемой деталью 1 О. Таким образом, происходит безударное и управчяемое (т. е. регулируемое как по скорости разворота, так и (ц) углу по(ирога рычагов 3) открытие привода. После цлцого выхода опорных пло(цадок 13 рычагов 3 из взаимодействия с отделяемой дед талью 10, последняя получает возможностьотойти вниз пол действием сил давления Р .В случае, когда Р =О, разворот рычагов 3 н процессе открытия привода происходит гл ьк о л и ц(ь под действием и ружи н 5., кор Ц 1 жоанси( ний и оглртий 11(н) н 1(ии к нин, 4 При снятии напряжения с обмотки элек. тромагнита управляющего устройства 8, под действием пружины 15 распорное звено 7 возвращается в исходное, т. е. нижнее, положение и своими наклонными плоскостями 16 воздействует на хвостовые части 4 рычагов 3 и разворачивает их в закрытое положение, сжимая при этом пружины 5. В конце своего перемещения распорное звено 7 входит во взаимодействие плоскими опорными пло(цадками 9 с хвостовыми частями 4 рычагов 3 по контактным плоскостям 14. Все детали привода снова находятся в закрытом положении, однако отделяемая деталь 1 О отсутствует, так как в процессе срабатывания привода она отошла вниз ца неограниченное расстояние. Механический привод сраоотал произошло отделение удерживаемой детали 10.Для того, чтобы произнести захват и удержание отделяемой детали 10, неооходимо подать напряжение на обмотку элек. тромагцита управля(ощего устройства 8. 11 ри этом распорное звено 7 переместится в крайнее верхнес полож( цие, рычаги,3 под действием пружин 5 ра(вернутся вокруг точек Л до взаимодейс(вия своими хвостовыми частями 4 с д(н(олнительными плоскимц опорными площадками 11 распорного зве. ца 7. Опорные пл(шапки 13 рычагов 3 при этом полцостьк уйдут н плоскости соответствующих окон корпуса 1 привода. 1 осле этоп можно прц помощи постороннего воздейсгвия подвестц к крайнему верхнему положеник отделяемук дота,(ь 10 и снять напряжение с обмотки э,(ектромагнита управляющего устройства 8. Рспорное звено 7 под действием пружины 15 возвратится в крайнее нижнее положение и своими наклонными плоскостями 16 с(вмесгно с пружинами 17 развернет рычаги 3 в их рабочее, т. е.закрытое положение, сжав пружины 5. Плоские опорные плоцадки 9 войдут во взаимодействие с хвостовыми частял(и 4 рычагов 3 по контактным плоскостям 14. Опорные площадки 13 рычагов 3 выидут из корпуса 1 при Овода и воидут во взаимодействие с соответствующими поверхностямц отделяемой летали 1 О. Механический привод закрыт и готов к новому циклу работы. Механический привод по авт. св.Ло 1038676, от,гнающн(1(.ч тем, что, с целью расширения эксплуатационных возможностей и повыпения надежности, ца распорном 20 звене привода выполнены смещенные однаотносительно другой вдоль оси привода и сопряженные между собой наклонными плоскостями основные и дополнительные плоские (пкрные плон(адки, образующие призмы с числом граней, равны( г(исл рычагов, а ца концах рычагов, вз(ил(одействующих с распорным звеном, выполнены углубления, в которых размещены пружины, установленные с возможностью по,(жима рычагов к распорному звену. прц этом указанные концы щ рычагов установлены с возможц(стью взанимодеистния с дополнительными плоскими о(горцымц площадками при открытом положении привода.
СмотретьЗаявка
4089483, 09.07.1986
ВЫСШАЯ ИНЖЕНЕРНАЯ ПОЖАРНО-ТЕХНИЧЕСКАЯ ШКОЛА
РОМАНЕНКО НИКОЛАЙ ТРОФИМОВИЧ, СКУРСКИЙ ВИТАЛИЙ ВЛАДИМИРОВИЧ, СКУРСКИЙ ЕВГЕНИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: F16K 31/44
Метки: механический, привод
Опубликовано: 30.10.1987
Код ссылки
<a href="https://patents.su/3-1348596-mekhanicheskijj-privod.html" target="_blank" rel="follow" title="База патентов СССР">Механический привод</a>
Рычаг привода велоколяски для инвалидов

Номер патента: 171281
Опубликовано: 01.01.1965
Авторы: Центральное, Шиманский, Шутак
МПК: A61G 5/02
Метки: велоколяски, инвалидов, привода, рычаг
...поворотной рукоятки, а ведомая - на валу, расположенном в полом корпусе и нижним концом соединенном с рычагом, связанным с управляемым механизмом, при помощи универсального шарнира, центр которого совпадает с осью качания,Такое выполнение рычага привода позволяет устранить влияние качательных движений корпуса рычага на управляемый механизм.На чертеже изображена кинематическая схема привода велоколяски для инвалидов,Рычаг привода велоколяски состоит из полого корпуса 1, установленной на валу 2 поворотной рукоятки 3, связанной посредством конических шестерен 4 и 5 с валом б, установленным в полом корпусе 1. Вал б связан с поворотным рычагом / при помощи универсального шарнира 8 и далее через шаровой палец 9 и тягу 10 с управляемым...
Рычажный привод для сообщения ряда импульсов попеременно двум отдельным приемникам приложением мускульной силы и веса человека

Номер патента: 7711
Опубликовано: 31.01.1929
Автор: Прудников
МПК: F16H 21/10
Метки: веса, двум, импульсов, мускульной, отдельным, попеременно, привод, приемникам, приложением, рычажный, ряда, силы, сообщения, человека
...плечо рычагов А в точку Н, в этой же точке сосредоточивается и усилие ножных двуплечих рычагов А, Для. передачи усилий от корпуса тела на рычагах Л устроены лямки .Е, соединенныес концами этих рычагов и идущиеот специального пояса; лямки же В,идущие через плечи рабочего, служат для увеличения развиваемогоруками усилия в начальный момент .подема рычагов Б,Рабочий становится, поочередно,в согнутом состоянии, то на одну,то на другую педаль А, затем совместно с поднятием рычага Б ру-,ками, а рычага Л поясом он выпрямляется из указанного состоянияи производит работу,Изобретатель считает, что, кромевыигрыша силы от свойств рычагов, в предлагаемом устройстве выгодно используются и силы реакций,развиваемые прй действии на рычаги Б и Л и...
Кантователь проката

Номер патента: 1532110
Опубликовано: 30.12.1989
Авторы: Гаврюшов, Жуков, Ильиных, Исаков, Кузьмин, Путилов
МПК: B21B 39/20
Метки: кантователь, проката
...с приводнымплечом 12 эажимного рычага 3. Канто"ванне осуществляется на стеллаже 16,на котором размещают прокат 17.Устройство работает следующим образом,В исходном положении кантующий рычаг опирается на фиксатор 7. Второйточкой опоры кантующего рычага является шарнир 9. Зажимной рычаг 3, шарнирно соединенный с кантующим рычагом, своим приводным плечом опирается на регулируемый упор 8. Прижатиерычагов 2, 3 к упору и фиксатору обеспечивается как силой тяжести, так иусилием гидроцилиндра, Для кантованияпроката 17 включается гидроцилиндр 6,шток которого выдвигается и поворачивает зажимной рычаг 3 относительнокантующего рычага до упора ролика 5 впрокат. При дальнейшем движении штоказажимной рычаг, опираясь на прокат,1поворачивает кантующий...
Способ измерения индукции магнитного поля
Номер патента: 1188682
Опубликовано: 30.10.1985
МПК: G01R 33/06
Метки: индукции, магнитного, поля
...распределения концентрации электронно-дырочной плазмы, вызванные соответствующими распределениями температур, показанными на фиг. 1, а также величины средней концентрации носителей в магнитном поле, вызванные этим распределением.Пунктирные кривые 6 и 7 обозначают величину средней концентрации носителей электронно-дырочной плазмы в отсутствие магнитного поля при температурах То и ТьКривые 8 и 9 (фиг. 2) показывают распределенияя концентрации электронно-дырочной плазмы в магнитном поле при разных его полярностях в случае нагрева полупроводникового датчика током, т. е, в отрицательной ветви 5-образной ВАХ. Кривые 14 и 15 - величины средних концентраций, вызванные этими перераспределениями в магнитном поле. Кривые 10 и 11 - распределение...
Устройство для смазки кулачков распределительного вала и рычагов привода клапанов

Номер патента: 1822462
Опубликовано: 15.06.1993
МПК: F01M 9/10
Метки: вала, клапанов, кулачков, привода, распределительного, рычагов, смазки
...пемзы, канители из тонкой проволоки, металлорезины спрессованной гронопочнсй канители (губчдтой резины, войлока, цоролод и других мдериа лон удонпегнорлюдих усллиям лдслг итермостойкостиВ зависимости о мдтериапа вставок-накопителей 14 и 16 здкреппеие их на корпусе 3 и рычаге 6 осуществляетсясоотнегстнующм спог обом, напримерприклеиванием. припдинанием, сваркой,механическим крецлеие и дру ими спосо 10 бами, При этом ячейки 15 н корпусе 3 моутвыполнятьсл без сенок (ребер),Устройство для смазки рдбогдет следующм образом,При работе дни; пл нрдщде.я рдс 15 пределительный вал 2 дсо от насоса покдалам в корпусе днигпел. подается нентрдльое огнерстие 91 гр,дн 1 ддалее через рддидл,11,сил 10,н кулачках 8 рдзбрызгиндеел цц окружости,20...
Предыдущий патент: Клапан
Следующий патент: Клапан
Случайный патент: Способ синхронного детектирования сигналов с фазовой манипуляцией