Устройство для моделирования вентильного электродвигателя
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНРЕСПУБЛИК 19) И 1 С 7/63 51) ОПИСАНИЕ ИЗОБРЕТЕ с обмоткои якоря, секции которой соединены в звезду (лучевая обмоткаЦель изобретения - повышение точисти моделирования. Для достиженияпоставленной цели в устройство введены два цифроаналоговых преобразователя, регистр, блок микропрограммного управления, синхронизатор работы. модели, третий и четвертый сумматоры. Для повышения точности мо"делирования в устройство также введены первый и второй датчики тока ирегулируемый источник напряжения.Устройство обеспечивает автоматиче, ское изменение алгоритма при моделировании коммутационных процессовкак на границе межкоммутационных интервалов, так и внутри них. 2 з.п.ф-лы, 20 ил., 2 табл,)о.К.Лозенко включе моста обрпараметраса (ЭДС,сит от ал преобраз ты или п ММ ВД, о рийные р необходи на измен ния, .нав контурах висит от равления Для п мени С ЕГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГННТ СССР А ВТОРСНОМУ СВИДЕТЕЛЬСТ(71) Московский энергетический институт(56) Авторское свидетельство СССР Ф 1035618, кл. С 06 С 7/48, 1980,Авторское свидетельство СССР Р 1425736, кл. С 06 С 7/62, 1985,(54) УСТРОЙСТКО ДЛЯ МОДЕЛИРОВАНИЯВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ(57) Изобретение относится к аналоговой вычислительной технике и предназначено для моделирования электромагнитных и электрсмеханических процессов в вентильном электродвигателе Изобретение относится к аналоговой вычислительной технике и предназначено для моделирования электромагнитных и электромеханических процессов в вентильном электродвигателе с обмоткой якоря, секции которой соединены н звезду (лучевая обмотка).Дель изобретения - повышение точности моделирования.В основу устройства положена математическая модель (ММ), отражающая изменение структуры электромагнитных контуров не только при детерминированном воздействии на ключи преобразователя частоты ВД, но и при изменении проводящего состояния диодов моста обратного тока преобразователя частоты (в том числе и при их). Проводимость элементоватного тока определяетсями электромагнитного процесток) и однозначно не завигоритма управления ключамиователя частоты, режима рабоараметров ВДОсобенностьписывающей тормозные и аваежимы, заключается также вмсти учета большого диапазояющихся значений ЭДС враще- ф, одимых в электромагнитныхДиапазон изменения ЭДС заисследуемого алгоритма упизвольного интервала вресф , с" 3 (такта коммута19. 15963 На входы 317-320- блока 26 с блока 55 микропрограммного управления поступает информация о требуемых для моделирования заданного режима на 5 чальных значениях тока. Указанная совокупность сигналов определяет порядок подключения операционных усилителей 330-332 и аналогового коммутатора 327 к входам 13 и 14 задания на чальных условий интеграторов 11, 12 блоков 7, 8 моделирования электромагнитных процессов контуров, В рассматриваемом примере при поступлении импульсана входах 3 17 и 320 бло ка 20 имеются сигналы положительного логического уровня, а на входах 318 и 319 - нулевого. К источнику питания подключаются катушки реле 333 и 336.-338, Размыкаются контакты 343 345 реле 337, обеспечивая запоминание значений токов 1(аа) ю 1 Ыак) ф (Ы ) . Замыкаются контакты 339 и 342 соответственно реле 333 и 336, обеспечивая подключение к входам 25 14 и 13 задания начальных условий интеграторов соответственно аналогового коммутатора 327, фиксирующего значение тока - Я), и операционного усилителя 331, Фиксирующего значение тока 3(Ы,) . Контакты 346-349 реле 338 обеспечивают перевод интеграторов 352, 353 в режим задания началь.ных условий. Длительность импульса 0нормирует время задания начальных условий. При этом за счет варьирования длительности. машинного времени можно исключить погрешность от конечного времени срабатывания клю-. чей и реле.40На втором межкоммутационном интервале и на последующих в процессе Формирования электромагнитного момента в ДВ режиме участвуют оба блока 7, 8 моделирования электромагнитных 45 контуров. Блок 7 моделирует контур со спадающим током,Ток 1, Я) спа иМдает до значения х (а ), если до конца И-го межкоммутационного интервала он успевает спасть до нуля,50 при смене его знака закрывается. ключ 27, и ток обратной полярности, как и в реальном ВД, протекать не может.Дпя того, чтобы смоделировать переход от ДВ-режима к режиму 0 на гра 55 нице межкоммутационного интервала, необходимо переключить коммутатор 73 (Фиг.За) блока 1 задания режима работв положение, при котором на 5 20его выходе появляется сигнал 0, коммутатор 701 в исходное положение, а коммутатор 70 включить. При этом 1 на границе очередного межкоммутационного интервала по импульсу Я мк происходит перезапись измененной информации с блока 1 задания режима работы на выходы Р-триггеров 137-143 блока 55 микропрограммного управления (фиг.б). Появляется сигнал единичного логического уровня на выходе логического элемента ЗИ 148 и на входах 172 и 174 постоянного запоминающего устройства 171, при этом на входах 173, 175, 176 последнего устанавливаются нулевые сигналы, На выход блока 55 микропрограммного управления считывается информация о состоянии сигналов управления ключами и регистрами устройства, необходимая для моделирования названного режима, Принцип работы узлов устройства при этом не отличается от описанного.Для моделирования на следующем межкоммутационном интервале режима 0 необходимо в течение текущего межкоммутационного интервала выключить коммутатор 70 и включить коммутатор 70 блока 1 задания режима работы (Фиг.За). Далее при переходе к режиму 0 необходимо вновь изменить состояние коммутаторов блока 1, а именно выключить коммутатор 70 и включить коммутатор 70, что обеспечивает последующий переход к ДВ-режиму. Считывание информации и соответствующие ей изменения алгоритма работы устройства происходят аналогично рассмс ренному.Для иллюстрации работы устройства, алгоритм работы которого определяется величиной токов в контурах, рассмотрим процесс моделирования режима ЛТ вида Т.Режим ДТ с алгоритмом управления вида Т характеризуется существованием областей с непрерывными и прерывистыми токами. Рассмотрим алгоритмы управления моделью,реализующие этот режим. На фиг.16 .показаны электрические цепи в режиме прерывистых токов. При этом на чертежах изображены только те диоды и идеальные ключи двухполупериодного пресбразователя частоты (Фиг,15), которые участвуют в образовании замкнутых электрических контуров в рассматриваемый интервал времени. Алгоритм управления устрой 21221596357ством формируется в блоке 55 микропрограммного управления. Блок 55 микропрограммного управления в данном конкретном случае может быть вы-,5 полнен согласно функциональной схемена фиг.9 и 10. Входной информацией для блока 55 является информация задания исследуемого режима на М-м межкоммутационном интервале. С выхода регистра 54 поступает информация о режиме, имеющем место на (И)-м интервале. В данном случае режим не меняется. Анализ электромагнитного процесса и структур рички цепей с коммутационным и нарастающим токами позволяет судить об условиях существования этих цепей, о наличии или отсутствии в них источника питания, значениях ЭДС вращения. Алгоритм работы модели в рассматриваемом режиме реализуются в блоке 55 (фиг.10) на логических элементах 2 И 276, 277, 2 ИЛИ 286, инвертор 294 и управляемом ключе 302. Управляющие сигналы мик ропрограммного устройства 55 управления поступают на соответствующие входы управляемых ключей 3-6, 27-30 и ЦАП 52 и 53. Сигналы задания соответствующего значения начальных условий каждого контурного тока с выходов 257-259, 266, 267 блока 55 (фиг.10) поступают соответственно на входы 317, 318, 353, 319, 320 блока 26 моделирования начальных значений тока35 на границе тактов коммутации, выполненного согласно функциональным схемам на фиг.11 и 13. Значения .начальных условий определяются через, значения токов в секциях, участвующих в образовании только одного контурного тока на И-и интервале, в конце (Я) -го углового интервала.В режиме прерывистых токов к концу (Б)-го межкоммутационного интерва 45 ла в секциях а, Ь, с обмотки якоряЮ.1 К.1КВД протекают токи хНа Я-м угловом интервале контурные токи определяются через токи секцийИЮК ф ИГлъ как Ьа Ь се.с так как (0) еКоммутационные токи (д Ьс е ,) воспроизводятся .на блоке 7 моделйрования электромагнитных процессов первого контура, а блок 8 моделирует55гй 1 процессы с нарастающими токами ( ,) во вновь образующихся электрических цепях. При смене межкоммутационного интервала блок 26 моделирова-.ния начальных значений тока обеспечивает задание начальгых условий= о.Токи,, ЭЛС вращения е 1, епри моделировании этого режима показаны на фиг.17.Электрические цепи на И-м межком-.мутационном интервале при ДТ с алгоритмом управления вида Т в режименепрерывных токов показаны на фиг,18.Осциллограммы контурных токов и токов,в секциях а, Ь, с обмотки якоряпоказаны на фиг.19. Коммутационныйток д замыкается по цепи: диод 497 -секций Ь, с - диоц 495 - источник питания - диод 497, и протекает под действием ЭЛС самоинцукции,.иПосле выполнения условия 1= О,организуется новая цепь: диод 498секции с, а - ключ 490 - диод 498, покоторой протекает нарастающий контурный токц под действием ЭДС вращенияе . Блок 7 обеспечивает моделирование на (О) -м межкоммутационном ин.ЙМтервале тока 1, на И-м тока д 1,при 1, ) 0 и д, после выполнейияусловия 1 = 0 (Лиг.19). Блок 8 обе И спечивает моделирование токана(И) -м межкоммутационном интервалеИ . Ки токов д, при 1 ) 0 ипослевыполнения условия , = 0 на И-м межкоммутационном интервале, При сменеМ-го и (М)-го межкоммутационныхинтервалов начальные условия для режима прерывистых токов остаются неизменными; 2.1(0) = 1 1 Ыц)11(0). К.1При1 = 0 внутри М-го межкоммутационного интервала должны быть заданыновые начальные условия 1 (Ы)ИК КК Ы), 1,(о) =. 1. С 1 (Ы) и. изменена структура схем набора контуров.ИМоделирование токаобеспечиваетосся включением управляемого ключа 4(эквивалентно значению 1 П 1= -П)на время изменения значения токадо нуля.При моделировании режима ДТ видаТ алгоритм работы модели автоматически изменяется при переходе черезграницу существования непрерывных то-ков (д = 0)Информацией для изме-нения алгоритма работы модели служитзначение тока 1 фиксируемого датчиком тока 66 (фиг.9). Уровень "0" навыходе Р-триггера 312 соответствуетрежиму с прерывистыми токами, а инверсный сигнал - режиму с непрерывными токами. Если д 1 (в,) = О, тоалгоритм изменения структуры устрой 5ства Формируется элементами 276, 277,286, 294, 296 и 302 блока 55 микропрограммного управления (фиг.9 и 10),при 1 ) ( С - элементами 276,278, 294 и 302. Остальные блоки устройства для моделирования работаютаналогично рассмотренному.Осциллограммы моделируемых токов,ЭДС вращения и диаграммы напряженияна выходах, датчика тока 66 и элемен-.тов блока 55 (Фиг.9 и 10) и синхронизатора 56 (Фиг.9) при режиме ДТ вида Т для случая непрерывных токовприведены на Фиг.20,Устройство для моделирования вентильного электродвигателя .обеспечивает автоматическое изменение алгоритмапри моделировании коммутационных процессов как на границе межкоммутационных интервалов, так и внутри их. Р 5Предположим, что необходимо изменить. режим работы ВД внутри межкоммутационного интервала. При таком режиме смена информации на выходах блока 1 задания режима работы, связанных с регистром 54 и блоком 55 микропрограммного управления, приводиткаждый раз к появлению сигнала положи"тельного логического уровня на выходе блока 1 задания, связанном с входом 58 синхронизатора 56 (фиг.1 и 2).35По командес последнего осуществляется необходимое для моделированиязаданного режима синхронное изменениеструктуры модели.40Формула изобретения 1. Устройство для моделирования вентильного электродвигателя, содержащее блок задания режима работы, двухполярный источник напряжения, четыре управляемых ключа, два сумматора, два интегратора, четыре блока умножения, интегросуммирующий усилитель, блок моделирования датчика положения ротора, два блока моделирования распределения магнитной индукции, блок задания момента нагрузки,. блок моделирования начальных значений тока на границе тактов коммутации, две пары встречно-параллельно соединенных управляемых ключей с односторонней прямой и обратной проводимостями, включ нных между первыми входами перваго и второго сумматоров ивы опервого и второго интеграторовсоответственно, вторые входы первого и второго сумматоров подключенык выходам соответственно первого ивторого блоков умножения, первые входы которых соединены с входом блокамоделирования датчика положения ротора и выходом интегросуммирующегоусилителя, первый вход которого подключен к выходу блока задания момента нагрузки, а второй и третий входысоответственно к выходам третьего ичетвертого блоков умножения, выходыпервого и второго интеграторов соединены соответственно с первымивходами третьего и четвертого блоковумножения, третьими входами перво- .го и второго сумматоров четвертымивходами второго и первого сумматоров и первым и вторым входами блокамоделирования начальных значений тока на границе тактов коммутации,первый и второй выходы которого подключены соответственно к входам вводаначальных условий первого и второгоинтеграторов, входы интегрированиякоторых соединены соответственно свыходами первого и второго сумматоров и пятыми входами второго и первого сумматоров, шестые входы первогои второго сумматоров подключены кобъединенным выходам соответственнопервого, второго и третьего, четвертого управляемых ключей, информационные входы первого, третьего и второго, четвертого управляемых ключей соединены соответственно с первым и вторым выходами двухполярного источниканапряжения, выходы первого и второгоблоков моделирования распределениямагнитной индукции подключены к вторым попарно объединенным входам первого, третьего и второго, .четвертого блоков умножения соответственно,о т л и ч а ю щ е е с я тем, что, сцелью повышения точности моделирования, в него введены два цифроаналоговых преобразователя, регистр, блокмикропрограммного управления, синхронизатор работы модели, третий и четвертый сумматоры, выходы которыхсоединены с входами первого и второго блоков моделирования распределениямагнитной индукции соответственно,выход смены режима блока задания режима работы соединен с первым входомзапуска синхронизатора работы моде26 25 1596357 ратной проводимостями и группа входоВ блока моделирования начальных значе-ний тока на границе тактов коммутации подключены к соответствующим выходам блока микропрограммного управления третьей группы. 2. Устройство по п. 1, о т л и -чающееся тем, что, сцельюповышения точности моделирования, внего дополнительно введены первыйи второй датчики тока, входы которыхсоединены с выходами первого и второго интеграторов, выход первого датчика тока подключен к управляющемувходу синхронизатора работы моделии к первому адресчому входу блокамикропрограммного управления, второйадресный вход которого соединен свыходом второго датчика тока.3. Устройство по п.1, о т л и ч аю щ е е с я тем, что, с целью повышения точности моделирования, 25 в него дополнительно введен регулируемый источник напряжения, выход котоого соединен с третьими входамитретьего и четвертого сумматоров.1 Та блица 1 Алгоритм управления Резям работы Ц, Ц, П (з) В(гг) До, ком- После мутации комму- тации лг 1 дг .3 дг лг з дв ДВ О -1 1 1 лв ПВ пр пр Ю ДТ (О- - ) О О 3(О (о(")обр.о брО Ы)амбрпр О О О 1 дВ дт,вида ДО О1 О пр пр РЪд обр.пр ДВ ДТ,вида Т О О 1 1 обр.пр дг фаз Чдг "лз ф 3О (а(ф)прОУ")обр,О пр дв дв Е - О.3 лз тлз пр,1 ,г 1 дг Чдг тлг дг пр обр. пр обр. пр.О обр. О2 ФО ДТВ" - - "1 О3 обр е обр. О ДТ,вида Т О О обр,. обр е ли, выход которого подключен к третьему входу блока моделирования начальных значений тока на границе тактов коммутации и к синхровходу реги-,стра, выходы которого соединены спервой группой адресных входов блокамикропрограммного управления, перваяи вторая группы выходов которого подключены соответственно к входам первого и второго цифроаналоговых преобразователей, выходы которых соединены с первыми входами соответственно третего и четвертого сумматоров,вторые входы которых подключены кпервому выходу блока моделированиядатчика положения ротора, второй выход которого соединен с вторым входом запуска синхронизатора работы модели, группа выходов которого соединена соответственно с второй группойадресных входов блока микропрограммного управления, третья группа адресных входов которого соединена сгруппой выходов блока задания режимаработы и с входами регистра, управляющие входы управляемых ключей, входыключей с односторонней прямой и обДВО 1 -1ДВ О О "1 О ДВ О "1 О ПВ О 1. Чд(е,) сРл(е,) ,(О) з,(О) ффлз болз зг. мдг л г : ф лз 1 лз 1 г27 1596357Продолжение табл." Режим работы Алгоритм управления Ц, П, П(1) К,(1 ) 1 1(0) 1 (0)"дз дз 0 0 обр. обр,а- О Эфм+ ОР")обр.обр .обр. 0обр. 0 ДТ,вида Д 0 0 0 1 -1 -1 фдг ПВ ДВ ПВ ПВ ДТ (басф- - )3 ЛТ (6 - -)4 Э 0 0 43 43обр обр,дт (6- - -)1 3 да дг г 1 0 -1 пр. дт (е- - -)2 Ф 3 21ДТ (6") -1 0Э обр, обр. дг 4 3 дт,(6- - -) Лв2 Ф обр. О+1 0 1 дг пр дг ДВ 6 - -пр пр ДВ 9 - -ф 30 1 0 обр,П р и м е ч а н и е, ДВ " двигательный режим; ПВ - режим противовключения; ДТ - режимдинамического торможения;,ДТ, вида Т и ДТ вида Д - режимы динамического торможения, организуемые включением одного иэ 2-хключей, обеспечивающих перевод в режим ПВ (для алгоритма вндвТ(Л) - включен ключ, управляющий сигнал .которого в ДВ режиме опережает (отствет) в фазовом отношении от сигнала управлениядругим ключом; 0 - режим отключения, при котором ток в отклю"ченных секциях обмотки якоря спадает по цепи, содержащей встречно включенный источник питания; О - режим отключения, прнкотором в, двухполупериодном преобразователе частоты,из двухключей, которые должны быть включены по сигналу датчика положения ротора в ЛВ режиме, включен один; .0 - угол опережениявключения; пр " прямое включение диода; обр - обратное включение диода; О - отсутствие диода в контуре; 1)(0) - значениетока "го электромагнитного контура в начале такта коммутаЦин) 1 1 г + 1 - сУммаРный ток.(3) ции оф) ИИ ВД записывается в относительных единицах в следующем виде: Й, . Й-- +д +05) -- +051 + 5д л .1 дг ф 2+ д соз (а - 6 -- -е +2 ми где индексы 1 и 2 относятся к величинам, характеризующим процессы в первом и втором независимых контурах ;нее, ею х - относительные значения момента нагрузки, частоты вращения, напряжения,тока в контурах соответственно;льИ с - безразмерное врео 50мяо) - относительная идееального холостогохода частота вращения;55М 1/К;Ь 1 о)/М - относительные элекО итромагнитная иэлектромеханическая постоянные времени соответственно, Ь - суммарная индуктивность секции 1 - суммарный моментинерции, приведенныи к валу ВЛю активное сопротивление двух последовательно включенных секций обмотки якоря;- максимальный пусковой момент; к(3,) ,здЕп НЬ, 1 Ст 2,у, (Е) дискретные функАции, соответствующие падению напряжения на диоде преобразователя частоты (в случае прямого включения приз. 02(1) = О их 01 К (1) = сфв случае обратног о в ключ ения приО К(д = аиО к (О Ознаку и величиненапряжения питания,величине смещениямоделируемого участка кривой распределения магнитнойиндукции в воздушном зазоре . (е)1=За З Е 0,1,г, 31;е,и - угловая длительность МК-интерва-.ла.Введение в математическую модельдискретных функций позволяет анализировать всевозможные структуры элек- .тромагнитных контуров, периодическименяющиеся при реализации тормозныхи аварийных режимов, описывать дискретный характер перехода к различнымучасткам кривой распределения индукции в воздушном зазоре, Конкретныезначения этих функций для наиболеечасто встречающихся режимов и их комбинаций приведены в табл.1.На фиг,1 и 2 представлена блок-схема устройства для моделирования вентильйого электродвигателя;на фиг.3 -функциональная схема блока заданияЙ(хада Оока д (рис.1) Юа 1 пнстгвнс тщйщтЦаШю ЖйЮюЮлю;а 25 (Фиг. 11) Уа Рхдд Иаеоегращара ЮОРИ 1).20 Составитель А.Яицкор Л,Пчолинская Техред. Л,Олийнык Корректор Л.Бескид исно Производственно-издательский комбин Заказ 2911ВНИИПИ Госуд вен 113 Тираж 561го комитета по из5, Москва, Ж,ретениям и открытиям при ГКНТ СССРушская наб д. 4/51 атент", г. Ужгород, ул. Гагарина55 15963 режима работы: а) первый вариант выполнения, б) - второй вариант выполнения; на Фиг.4 - функциональная схема блока моделирования датчика положения ротора; на фиг.5 - функцио 5 нальная схема регистра; на фиг,6 " функциональная схема первого варианта выполнения блока микропрограммного управления и синхронизатора работы 1 О модели; на Фиг.7 и 8 - функциональная схема второго варианта выполнения блока микропрограммного управления и синхро.изатора работы модели; на Фиг.9 и 10 - Функциональная схема вы полнения датчиков тока и третьего варианта выполнения блока микропрограммного управления и синхронизатора работы модели; на фиг.11 - функциональная схема блоков моделирова ния электромагнитных процессов контуров и блока моделирования начальных значений тока на границе тактов коммутации; на фиг.12 - функциональная схема второго варианта выполнения 25 блока моделирования начальных эначе" ний тока на границе тактов коммутации; на Фиг.13 - схема подключения дополнительных элементов вводимых в блок моделирования начальных значЕ ний тока (Фиг.11) для реализации управления от блбка микропрограммногоуправления фиг.9, 10; на фиг.14 функциональные схемы цифроаналоговых преобразователей; на фиг.15 - блоксхема вентильного электродвигателя, выполненного с трехсекционной, соединенной в звезду обмоткой якоря и двухполупериодным преобразователем частоты; на Фиг.16 - электриче- ф ские цепи в ВД на Б-м межкоммутационном интервале при ДТ вида Т в режиме прерывистых токов; на фиг.17 - диаграммы токов, . и ЭДС вращения е , епри моделировании Режима ДТ вида Т для случая прерывистых то- . ков; на Фиг.18 - электрические цепи в ВД на 1-м межкоммутационном интервале при ДТ вида Т в режиме непрерывных токов; на фиг.19 - осцн лограммы контурных. токов и токов в секциях обмотки якоря при режиме ДТ вида Т для случая непрерывных то" ков; на Фиг.20 - осциллограммы моделируемых токов, д , ЭДС вращения е е и диаграммы работы элементов микропрограммного устройства управления(фнг.9, 10) и синхронизатора работы модели (фиг.9) при ре 57 6жиме ДТ вида Т для случая непрерывных токовУстройство дпя моделирования вентильного электродвигателя (фиг.1 и 2) содержит блок 1 задания режима работы, двухполярный источник 2 напряжения, четыре управляемых ключа 3-6, блоки 7 и 8 моделирования электромагьитных процессов первого и второго контуров, выполненные из сумматора 9 (10) и интегратора 11 (12) с входом 13 (14) для ввода начальных условий, четыре блока 15-18 умножения интегросуммирующий усилитель 19, блок 20 моделирования датчика положения ротора с двумя выходами 21 и 22, два блока 23 и 24 моделирования распределения магнитной индукции, блок 25 задания момента нагрузки, блок 26 моделирования начальных значений тока на границе тактов коммутации, две пары управляемых ключей с односторонней прямой 27 (28) и обратной 29 (ЗО) проводимостями, включенных между первым входом 31 (31) и выходом 32 (33) блока 7 (8) моделирования электромагнитных процессов контуров, с вторым входом 34 (35), входы 36-38 интегросуммирующего усилителя, третьи входы 39, 40 первого 9 и второго 10 сумматоров, четвертые входы 41 и 42 второго 10 и первого 9 сумматоров, первый 43 и второй 44 входы блока 26, первый 45 и второй 46 выходы и третий вход 47 блока 26, пятый 48 (49) и шестой 50 (51) входы сумматоров 10 (9), два цифроаналоговых преобразователя (ПАП) 52 и 53, регистр 51 блок 55 микропрограммного управления, синхронизатор 56 работы модели с входами 57 и 58 запуска, третий 59 и четвертый 60 сумматоры с входами 61, 62 и 63, 64 соответственно, вход 65 синхронизации регистра 54.Устройство по фиг.1 и 2 может быть дополнительно снабжено двумя датчиками 66 и 67 тока, а синхронизатор 56 работы модели дополнительно снабжен входом 68.Устройство (Фиг.1,2) может быть также снабжено регулируемым источником 69 напряжения.Блок 1 задания режима работы по Фиг.За содержит семь последовательно-параллельных коммутаторов 70, выполненных с индикацией состояния на их выходе, семивходовый логиче.ский элемент ИЛИ 71, управляемыйключ 72 и последовательно-нараллельный коммутатор 73. Блок 1 задания ре. жима работы по Фиг.Зб содержит 1 последовательных коммутаторов 74, 1 низкочастотных фильтров 75 на основе5 КС-цепей, 1 КБ-триггеров 76, выполненных с индикацией выходного состояния, два 1-входовых логических элемента ИЛИ 77 и 78, две дифференцирующие КС-цепи 79 и 80, последовательно-параллельный коммутатор 81 и 1 управляемых ключей 82.Блок 20 по Фиг.4 содержит интегратор 83, инвертор 84, встречно включенные диоды 85 и 86, компаратор 87, формирователь импульсов на базе логических элементов 2 ИЛИ-НЕ 88 и 89 и КС-цепи 90, управляемый ключ 91 на транзисторе, реле 92 с нормально разомкнутым контактом 93, .инвертирующий триггер 94 ймитта, два логических элемента 2 ИЛИ-НЕ 95 и 96, дифференцирующие КС-цепи 97 и 98 и логический элемент 2 И- НЕ 99. 25Регистр 54 по фиг.5, состоит из семи тактируемых П-триггеров 100 и семи Фильтров 101 низкой частоты на основе КС-цепей. Установка триггеров 100 при включении устройства в исход ное состояние .происходит с помощью дифференцирующей КС-цепи 102.Блок 55 микропрограммного управления по фиг.б обеспечивает моделирование следующих режимов и их комбинаций: двигательного (ДВ); противовключения (ПВ); двигательного с запаздывающей-коммутацией при О =омк(ЛВф= -омк)ю отключения, при котором ток в отключенных секци 40 ях обмотки якоря спадает по цепи, содержащей встречно включенный источник питания (О); отключения, при котором в двухполупериодном преобразователе частоты из двух ключей, которые должны быть включены по сигналам датчика положения ротора в ДВ режиме, включен один; динамиеского торможе- ния с опережающей 9 " 2 о( (ДТ, В = = 2,о ) и запаэдывающей О = - Ы мкмк50 (ЛТ, О= -оай,) коммутацией. Блок 55 микропрограммного управления выполнен с семнадцатью входами 103-119 и семнадцатью выходами 120-136. Входы 103-109 подключены к .соответствующим выходам блока 1. задания режима рабо 55 ты (фиг,За), входы 110-116 - к соответствующим выходам регистра 54 (Фиг.5) а входы 117-119 - к соответ ууствующим выходам синхронизатора 56 (Фиг.б). Блок 55 микропрограммного управления (Фиг.б) содержит семь тактируемых П-триггеров 137-143, двадцать семь логических элементов ЗИ 144-170 и постоянное запоминающее устройство 171 с пятью входами 172 76, алгоритм программирования котоого приведен в табл,2, При включеии устройства установка 0-триггеров 137 в 1 в исходное состояние осуществляется сигналом с КС-цепи, Выходы логических элементов ЗИ 144 170 связаны с соответствующими входами 172-176 постоянного запоминающего устройства 171 через развязывающие диоды. Выходы постоянного запоминающего устройства 171 являются выходами 120-136 блока 55 микропрограммного управления. Синхронизатор 56 работы модели выполнен с двумя входами 57 и 58 и тремя выходами, он содержит шесть логических элементов 2 ИЛИ-НЕ 177-182, КБ-триггер 183 и три КС-цепи 184-186. Блок 55 микропрограммного управления по Фиг,7 и 8 обеспечивает моделирование следующих режимов и их комбинаций: ДВ, ЛТ при О = -а ; ДТ при 9= 2 Ы, , ПВ, О, Блок 55 выполнен с одиннадцатью. входами 187-197 и пятнадцатью выходами 198-212. Входы 187-191 могут быть подключены к соответствующим выходам блока 1 задания режима работы, выполненного с шестью выходами согласно схеме на Фиг.Зб, входы 192-196 к соответствующим информационным входам пятиканального регистра 54, синхронизированного по заднему фронту и выполненного по любой известной схеме, а вход 197 - к соответствующему выходу синхронизатора 56, показанного на фиг.8. Блок 55 микропрограммного управления по фиг,7 и 8 содержит девятнадцать, логических элементов 2 И 213-231 и инвертор 232. Выходы логических элементов 2 И 213-231 подключены к соответствующим выходам 198-212 блока 55 микропрограммного управления 55 через развязывающие диоды. Синхронизатор 56 (фиг.8) выполнен с двумя входами 57 и 58 и двумя выходами 62 и 233, и содержит логические элементы 2 ИЛИ 234 и 235 ЗАПРЕТ 236, тактируемый 0-триггер 237, одновибратор 238 и КС-цепь 239, 1596357 10В качестве варианта блока 55 микропрограммного управления, имеющего четырнадцать выходов, может быть использован модернизированный блок 55 микропрограммного управления, по 5 казанный на фиг.7 и 8. В этом случае блок 55 микропрограммного управления не содержит логических элементов 2 И 225-227 и инвертора 232 и имеет выходы 198-204, 206-212.На фиг.9 и 10 показаны функциональные схемы, первого 66 и второго 67 датч.ков тока, синхронизатора 56, с входами 57, 58 и 68 и соответствующего им блока 55 микропрограммного управления. В данном конкретном случае блок 55 микропрограммного управления обеспечивает моделирование следующих режимов и их комбинаций: ДВ; динамического торможения, организуемого включением одного из двух ключей, обеспечивающего перевод в режим ПВ (для режима ДТ вида Т (Д) включен ключ, управляющий сигнал ко торого в ДВ режиме опережает (отстает) в фазовом отношении от сигнала управления другим ключом. Блок 55 микропрограммного управления по фиг.9 и 10 выполнен с одиннадцатью входами, 240-250 и семнадцатью выходами 251-267. Входы 240-242 могут быть подключены к соответствующим входам блока 1 задания режима работы, выполненного с четырьмя выходами согласно схеме фиг.Зб, входы 243-245 - к соответствующим выходам трехканального регистра, синхронизированного по заднему фронту и выполненного по любой известной схеме, входы 246-248 .- 40 к соответствующим выходам синхронизатора, входы 249-250 - соответственно к выходам первого 66 и второго 67 датчиков тока, выполненных на базе компараторов. 45Блок 55 по фиг.9 и 10 содержит логические элементы 2 И 268-.283, ЗИ 284 и 285, 2 ИЛИ 286-289, ЗИЛИ 290, инверторы 291-298; управляемые ключи .299-305 Э-триггеры 306-307 и КС цеУ 50 пи 308 и 309. Выхоцы элементов 268, 269, 271-273, 275-278, 280, 282, 286, 288-290, 299, 301 и 304 подключены к соответствующим выходам микропрограммного устройства 55 управления (фиг.9,10) через развязывающие ди.оды. Синхронизатор 56 (фиг.9) содержит одновибратор 3 10, два тактируемых Э-триггера 311 и 312, логические элементы ЗАПРЕТ 313, ЗИЛИ 314, 2 И 315.:и НС-цепь 316.На фиг.11 показана функциональнаясхема блоков 7, 8 моделирования элек -тромагнитных процессов контуров иблока 26 моделирования начальныхзначений тока на границе тактов коммутации. Блок 26 выполнен с семьювходами 43, 44, 47 и 317-320. Приэтом входы 317-320 могут быть подключены к выходам 127, 128, 135 и136 блока 55 микропрограммного управления (фиг.б) соответственно. В данном. случае блок 26 (фиг11) содержитлогические элементы 2 И 321-324,4 ИЛИ-НЕ 325, ЗАПРЕТ 326, три аналоговых коммутатора 327-329 с памятью,три инвертирующих операционных усилителя 330-332 и управляемые реле 333338, Реле 333-336 имеют по одномунормально разомкнутому контакту соответственно 339-342. Реле 337 выполнено с тремя нормально замкнутымиконтактами 343-345. Реле 338 имеетпо два нормально замкнутых 346, 347и гормально разомкнутых 348 и 349контакта,Блок 7 (8) моделирования электромагнитных процессов первого (второго) контура (фиг.11) содержит последовательно соединенные шестивходовыйсумматор 9 (10) и интегратор 11 (12),включающий инвертирующий операционный усилитель 350 (351) и инвертиру"ющий интегратор 352 (353) с входом13 (14) для ввода начальньг: условий,выполненный по типовой схеме, Каждыйиз управляемых ключей 27-30 с односторонней проводимостью состоит иэпоследовательно соединенных управляемого переключателя и диода.Для случаев, когда блок 55 микропрограммного управления выполнен счетырнадцатью выходами, как описановыше, требуется задание следующих начальных условий для токов в контурах: где з. (О), 1 (о( ) - значения токов в электромагнитных контурах в начале М-го и в конце (М)-гомежкоммутационных.интервалов, 1 = =ф 1., + .Функциональная схема блока 26 моделирования начальных значений токов на границе тактов коммутации может быть выполнена согласно фиг.14, В этом случае блок 26 имеет пять входов 43, 44, 47, 354 и 355. Входы 354 и 355 могут быть, например, подключены соответственно к выходам 204 и 212 блока микропрограм-,О много управления,. выполненного согласно схеме фиг.7 и 8 с учетом изменений описанных ранее и необходимых для выполнения его с четырнадцатью выходами. Блок 26 (фиг,12) содержит два логических элемента 2 И 356 и 357, два управляемых реле 358.и 359, два аналоговых коммутатора 360 и 361 с памятью и йнвертирующий операционный усилитель 362. Реле 358 и 359 20 имеют каждое по два нормально замкнутых контакта 346 (фиг.11) :.; 363 (фиг,12) и 347 (фиг.11), 364 (фиг.12) соответственно и по одному нормально разомкнутому контакту 348 и 349 25 (фиг.11) соответственноДля случая, когда блок микропрограммного управления выполнен согласно функциональной схеме фиг.9 и 10 и требует задания следующих начальньм условий тока: ЭО з. (0)аз., (а ); -, (о,);(о); (,)35 ",(О) ЕЫмк)т Ими) е -"( )3Функциональная схема блока 26 мо делирования начальных значений тока может быть выполнена согласно фиг.11, но приэтом блок 26 дополнительно содержит логический элемент 2 И 365, управляемое реле 366 с одним нор мально разомкнутым контактом 367 (фиг.13). При этом первый вход логического элемента 2 И 365 служит дополнитсльным восьмым. входом 368 (фиг.13), подключен к выходам 257, 258, 266, 267, 259 блока 55 микропрограммного управления (фиг.9 и 10) соответственно.На фиг.14.показаны функциональные схемы ЦАП 52 и 53, управляемые по сигналам с блока 55 микропрограммно 55 го управления по фиг.б, В данном случае ЦАП 53 (фиг.14 а) выполнен двухразря",ным и, следовательно, имеет два входа 369 и 370.управления. Онсодержит операционный усилитель 371,два входных резистора 372 и 373 которого подключены параллельно, каждый через управляемый ключ соответственно 374 и 375, Входы управленияключей 374 и 375 являются входами369 и 370 ЦАП 53 и подключены к выходам 133 и 134 блока 55 микропрограммного управления (фиг.б, табл. 1).Резисторы 372 и 373 имеют сопротивления, соотносящиеся между собойкак 1:2.ЦАП 52 (фиг.14 б) может быть выполнен трехразрядным и в этом случаеимеет три входа 376-378, подключенные к выходам 124-126 блока 55 микропрограммного управления по фиг.б,ЦАП 52 выполнен на операционном усилителе 379, входные резисторы 380382 которого подключены параллельно, каждый через управляемый ключсоответственно 383-385. Входы управляемых ключей 383-385 являются соот -ветственно входами 376-378, ЦАП 52,Резисторы 380-382 имеют сопротивления, соотносящнеся между собой как1:2:3. В цепь обратной связи операционных усилителей 371 и 379 включены резисторы 386-.387,Кроме того, каждый из последовательно-параллельных коммутаторов 70(фиг,За) содержит светодиод 388 ирезистор 389 Блок задания режима работы (фиг.Зб) образует 1 транзисторов 390, 1 резисторов 391, 1 светодиодов 392. Блок 20 моделированиядатчика положения ротора (фиг.4) содержит резисторы 393 и 394 и диоды395 и 396Блок 55 микропрограммного управления по фиг.б имеет КС-цепь397, группы диодов 398 и 399,и группу резисторов 400. Блок 55 микропрограммного управления по фиг.7 и 8содержит группы диодов 401 и 402(фиг.7) и 403 (фиг,8), Блок 55 микропрограммного управления по фиг.9и 10 состоит из групп диодов 404(фиг.9), 405 (фиг,10)Латчик токабб (67) .(фиг.9) выполнен на компараторе 406 (407). и диоде 408 (409)Блок .7 (8) моделирования электромагнитных контуров (фиг.1 1) содержитрезисторы 410-420 .(421-431), конденсатор 432 (433). Каждый ключ 27-30(фиг.11) состоит из управляемогопереключателя 434-437 и диода 438 -441 соответственно. Блок 26 (фиг.11)имеет резисторы 442-454, конденсаторы 455-457, а реле 333-338 указанного блока - резисторы 458, 459, транзистор 460, электромагнитное реле 461 и диод 462. Блок 26 (фиг.12) содержит резисторы 463-469, конденсаторы 470,. 471, а реле 358 (359) указанного блока - резисторы 472,473 (474, 475), транзистор 476 (477), электромагнитное реле 478 (479), диод 480 (481). Реле 366 блока 26 содержит езисторы 482 и 483, транзистор 484, электромагнитное реле 485 и диод 486.15В случаях выполнения блока 55 микропрограммного управления по функцио- нальной схеме на фиг.7 и 8 или 8 и 9 ЦАП 52 и 53 выполняются двухразрядными и могут быть реализованы согласно функциональной схеме фиг.14 а.Блоки 23 и 24 моделирования распределения магнитной индукции реализованы на блоках нелинейностиВ случае синусоидального распределе ния индукции в воздушном зазоре блоки 23 и 24 имеют следующие выходные характеристики:при выполнении блока 55 микропрограммного управления согласно фун кциональной схемы на фиг,63Г, = соз Я - 9 -- -Ы +к+(Р (е 1 Е 0;1;3;Ю 140при выполнении блока 55 микропрограммного управления согласно функциональным схемам по фиг.7, 8 или фиг.9, 10 соответственно:451 Р сов (а( - 0 - -- О( + 1 мк 503Р = соз (о - 6 -1 2+ . (е , 1 Е0;1;2,.55Плавное угловое смещение кривойраспределения индукции задается углом9 и осуществляется путем подачи со-ответствующего величине угла 8 напряжения на третьи входы суммирующихусилителей 59 и 60. Указанное напряжение подается с выхода регулируемого источника 69 напряжения.Блок 25 задания момента нагрузкивоспроизводит механическую характеристику механизма. При воспроизведении выходной характеристики =сопзг при И = чаг блок 25 может быть реализован на источнике постоянногонапряжения. При моделировании нагрузки с вентильной характеристикой блок25 реализуется на базе блока нелинейности.В качестве интегросуммирующих и суммирующих усилителей, блоков нелинейности, блоков умножения двух переменных, источников напряжения могутбыть использованы аналогичные по своему Функциональному значению блокианалоговой вычислительной машины.Блоки моделирования электромагнитных процессов первого 7 и второго 8 контуров построены согласно дифференциальным уравнениям (1) и (2) и воспроизводят электромагнитные про" цессы в контурах. Например, при исследовании двигательного режима или режима противовключения в них моделируются нарастающий х и спадающий .д токи. Зависимость распределения магнитной индукции в воздушном зазоре вдоль окружности статора для каждого электромагнитного контура реализуется в блоках 23 и 24 моделированияраспределения магнитной индукции.Может быть задан синусоидальний,трапецеидальный и др. законы распределения индукции в зазоре, Для формирования сигналов, пропорциональных ЭДС вращения и составляющим электромагнитного момента, используются блоки умножения 15, 16 и 17, 18. На интегросуммирующем усилителе 19 воспроизводится решение уравнения движения электропривода (3). Задание необходимого знака и величины напряжения питанияП осуществляется с помощью двухполярного источника 2 напряжения и ключей 3-6, управляемых по сигналам с блока 55 микропрограммного управления. Динамическое задание начальных условий тока при смене структуры электромагнитных контуров осуществляется при помощи блока 26. Указанный блок в момент смены структуры электромагнитных контуров фиксирует значения токов в них и наосновании сигналов управления с бло-, ка 55 микропрограммного управления задает необходимые начальные условия интеграторам 11 и 12. Управление моделью осуществляется с помощью, блока 1 задания режима работы, определяющего вид или комбинацию исследуемых режимовСинхронизатор 56. работы модели синхронизирует работу всей модели при смене моделируемого режима на границе или внутри межкоммутационно 10 го интервала, а также при смене структуры моделируемых. электромагнитных контуров внутри межкоммутационного интервала по сигналам с датчика тока. Блок 55 микропрограммного управления при смене структуры электромагнитных контуров, например, на границе межкоммутационных интервалов в. соответствии с информацией о режимах работы на предшествующем и следующем за ним тактах коммутации определяет изменения в структуре модели и значения начальных условий электромагнитных процессов. Информация о пред 25 шествующем и следующем за ним режимах работы поступает с регистра 54 и блодатчика положения ротора формируется дискретная информация о прохождении ротором электродвигателя углового интервала, равного межкоммутационному. Кроме того, в аналоговой форме формируется информация об угловом положении ротора на межкоммутационном интервале.Рассмотрим работу устройства для моделирования ВД на конкретном примере. Предположим, что ВД выполнен с элект 1 омеханическим преобразователемка 1 задания режима работы соотьетственно. При изменении структуры модели внутри такта коммутации дополнительно к указанным в блоке 55 микропрограммного управления анализируется информация с синхронизатора 56 и датчиков 66 и 67 тока. На выходе35 блока 55 микропрограммного управления формируется информация о начальных значениях токов в контурах 1 (0). и 1(0), 0 состоянии сигналов управ ,ления ключами 27-30 с одностороннейпроводимостью (определяется значениями функций К(1) ), ключами 3-6 (определяется значениями функции .1, з 1 дп 0) и регистрами 32 и 53 (определяется значениямифункций (е) ).На выходе блока 20 моделирования3 с числом пар полюсов р = 1, трехсек-. ционной соединенной в звезду обмоткой якоря и двухполупериодным преобразователем частоты, а устройство для моделирования выполнено согласно функциональным схемам на фиг.За;4; 5; 6; 12; 16. Блок-схема ВД представлена на фиг15, Он содержит обмотку якоря с секциями а, Ь, с и преобразователь частоты, выполненный на шести управляемых ключах 487-492 и шести диодах моста обратного тока 493-498. Рассмотрим случай моделирования ДВ режима при 9 = 0 с дальнейшим переходом на границах межкоммутационных интервалов последовательно к режиму 0 , к режиму 0 и возвращение к ДВ режиму. Такой режим соответствует в реальном ВД пропуску сигнала управления одним из ключей преобразователя частоты.Управление устройством осуществляется от блока 1 задания режима работы (фиг.За). На фиг.За показано состояние контакторов 70, 73 соответствующее исходному, Для моделирования ДВ режима необходима переключить коммутатор 701. При этом на его выходе появляется сигнал положительного логического уровня, Указанный сигнал поступает на вход 103 блока 55 микропрограммного управления (фиг.б) и через логический элемент ИЛИ 71, управляемый ключ 72 (фиг,За) на вход днфференцирующей КС-цепи 184 синхронизатора 56 .(фиг.б). Сформированый на его выходе импульс устанавливает на прямом выходе 118 КБ-,триггера 183 синронизатора 56 сигнал положительного логического уровня и, кроме того, через логические элементы 2 ИЛИ 177 и 178, поступает на 117 вход блока 55 микропрограммного управления, обеспечивая перезапись информации с выходов блока 1 на выход триггеров 137-143 соответственно. При подключении устройства к источнику питания импульсом с дифференцирующей цепи 102 (фиг .5) на выходах триггеров 100 1-100 , 100 -1007 регистра 54 устанавливается сигнал нулевого логического уровня, а на выходе триггера 100 4 - положительного логического уровня. Указанная совокупность сигналов поступает на входы,110-116 блока 55 микропрограммного управления (фиг.б) и характеризует отключенное состояние ВД в начальный мо 1596357 18и 1 1,1 соз (а +45 мент времени. Наличие сигналов положительного логического уровня навыходе П-триггера 140.и на входах103 и 113 блока 55 микропрограммно 5го управления приводит к появлениюсигнала положительного логическогоуровня на выходе логического элемента И 149 и следовательно на входах173 и 174 постоянного запоминающегоустройства 171. На выходах последнего, а следовательно, и на выходахблока 55 микропрограммного управления формируется совокупность сигналов, обеспечивающих перевод в открытое состояние ключей 6 и 27(фиг . 1), 374 (фиг, 14 а) и 375 (фиг. 14 б)состояние остальных управляемыхключей остается без изменений. Этоэквивалентно заданию следующих значений свободных членов и коэффициентов дифференциальных уравнений,(0) = О, и моделированию запуска ВД,При поступлении напряжения питания на вход 51 блока 8 моделирования электромагнитных процессов второго контура (фиг.1, 12), на выходе44 указанного блока появляется ток1, который, поступая на блок 17 35умножения, определяет составляющуювращающий момент двигателя р,мкхансов ( О( - ) у ток хпри этом 40 отсутствует и, следовательно, составляющая момента4 М+ в в ) = О. Составляющие вращающе 2 го Момента р= ц+ р, суммируясь с моментом нагрузки р, на интегросуммирующем усилителе 19 преобразуются в частоту вращения двигателя о, которая, действуя на блок 20 моделирования датчика положения ротора, ,превращается в угол поворота ротора 4, квантованный на отрезки, равные межкоммутационному интервалу 4, При этом на выходе 22 блока 20 формируется аналоговый сигнал а, опре-деляющий угловое положение ротора ВЛ на межкоммутационном интервале, а на выходе 21 - дискретный сигнал о прохождении ротором МК-интервала. Пилообразный сиггал о(, поступая,июю фна блоки 23 и 24 формирования распределения магнитной индукции, определяет конкретное значение функций Г и Г для текущего положения ротора,которье затем поступают. на блоки умножения 15-18 и совместно с сигналами. о 3 и 11, 1 М Формируют линейные ЭДС вращения: е =Ю Г = Ш соз ( +1фм. д(м+ - -) е =сдР = асов ( с- -- )2 2 и электромагнитные моменты контуров4 мр = х соз (а(+ -- ) р=соз х2й.ах ( в( --- ). Как только ю Ф 0 и2о Ф 0 сигналы е и е начинают участвовать в формировании токов 11 и х.В конце, каждого межкоммутационного интервала на выходе 65 синхронизатора 56 формируется импульскоторый синхронизирует работу всего устройства на границе названных интервалов, В частности, по этому импульсу происходит перезапись содержимого регистра 54. В рассматриваемом примере в конце первого межкоммутационного интервала на его выходе 110 (фиг.6), характеризующем ДВ-. режим, появляется сигнал положительного логического уровня. При вновь сформированной на входах блока 55 микропрограммного управления совокупности сигналов появляются дополнительные единичные сигналы на его выходах 127и 136. Это соответствует формированию,отличных от рассмотренных ранее начальных условий тока, а именно 1,(0)й19) и ЫО) = -1,Ыц,).Рассмотрим работу блока 26 моделирования начальных значений тока на границе тактов коммутации. Для сохранения непрерывности работы модели операция задания начальных условий тока выполняется во время изменения структуры устройства. При работе устройства на входы.43 и 44 блока 26 (фиг.11) поступает информация о текущем значении токови 1. , При но ступлении управляющего импульса на вход 47 (в рассматриваемом случае им.пульс Ц,) она запоминается аналоговыми коммутаторами 327-329 с памятью.
СмотретьЗаявка
4363896, 18.01.1988
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ИВАНОВ АЛЕКСАНДР АЛЕКСАНДРОВИЧ, ЛОЗЕНКО ВАЛЕРИЙ КОНСТАНТИНОВИЧ, ХОЦЯНОВА ОЛЬГА НИКОЛАЕВНА
МПК / Метки
МПК: G06G 7/63
Метки: вентильного, моделирования, электродвигателя
Опубликовано: 30.09.1990
Код ссылки
<a href="https://patents.su/29-1596357-ustrojjstvo-dlya-modelirovaniya-ventilnogo-ehlektrodvigatelya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования вентильного электродвигателя</a>
Устройство для вероятностного моделирования работы транспортных систем

Номер патента: 1170459
Опубликовано: 30.07.1985
Авторы: Бродский, Вольф-Троп, Дризе, Карасов, Рубинштейн, Фомин
МПК: G06N 7/08
Метки: вероятностного, моделирования, работы, систем, транспортных
...входов блока . памяти соответственно, группа адресных входов которого подключена к выходам дешифратора соответственно, -я ( = 1,И) группа выходов блока памяти соединена с первой группой информационных входов -го блока выбора направления соответственно, вторая группа информационных входов которого подключена соответственно к выходам элементов ИЛИ группы второго блока моделирования выхода заявок -го имитатора транспортного органа и информационным входам блока мультиплексоров, группа выходов -го блока выбора направления соединена с группой входов -го имитатоРа транспортного органа и соответствую" щими информационными вхоДами первого мультиплексора, информационный выход первого реверсивного счетчика 1-го транспортного органа соединен с...
Устройство стабилизации режима с заданным наклоном статической характеристики

Номер патента: 195529
Опубликовано: 01.01.1967
МПК: G05B 5/01, H01H 47/22
Метки: заданным, наклоном, режима, стабилизации, статической, характеристики
...открытые контакты реле генератора тактовых импульсов подключен к емкости, ее вторая обкладка подсоединена к диодному мосту, в диагональ которого включена одна из двух обмоток двухпозиционного поляризованного реле, а вторая обмотка этого реле через нормально открытые контакты реле генератора тактовых импульсов включена в КС-цепь задания требуемого градиента статической характеристики объекта, и емкость КС-цепи закоммутирована нормально замкнутыми контактами реле генератора тактовых импульсов.Это упрощаетНа чертеже по устронство.казано предлокенное устройцип действия предлагаемой схемы сосравнении по модулю задания ЛФс с ениями ЛФ регулируемой величины. ЗАЦИИ РЕЖИМА1 ЕСКОЙ ХАРАКТЕРИСТИКИекав 20951) Тираж 535 ПодписноЦНИИГ 1 И Комитета...
Устройство для вычисления функции арктангенса отношения
Номер патента: 1615709
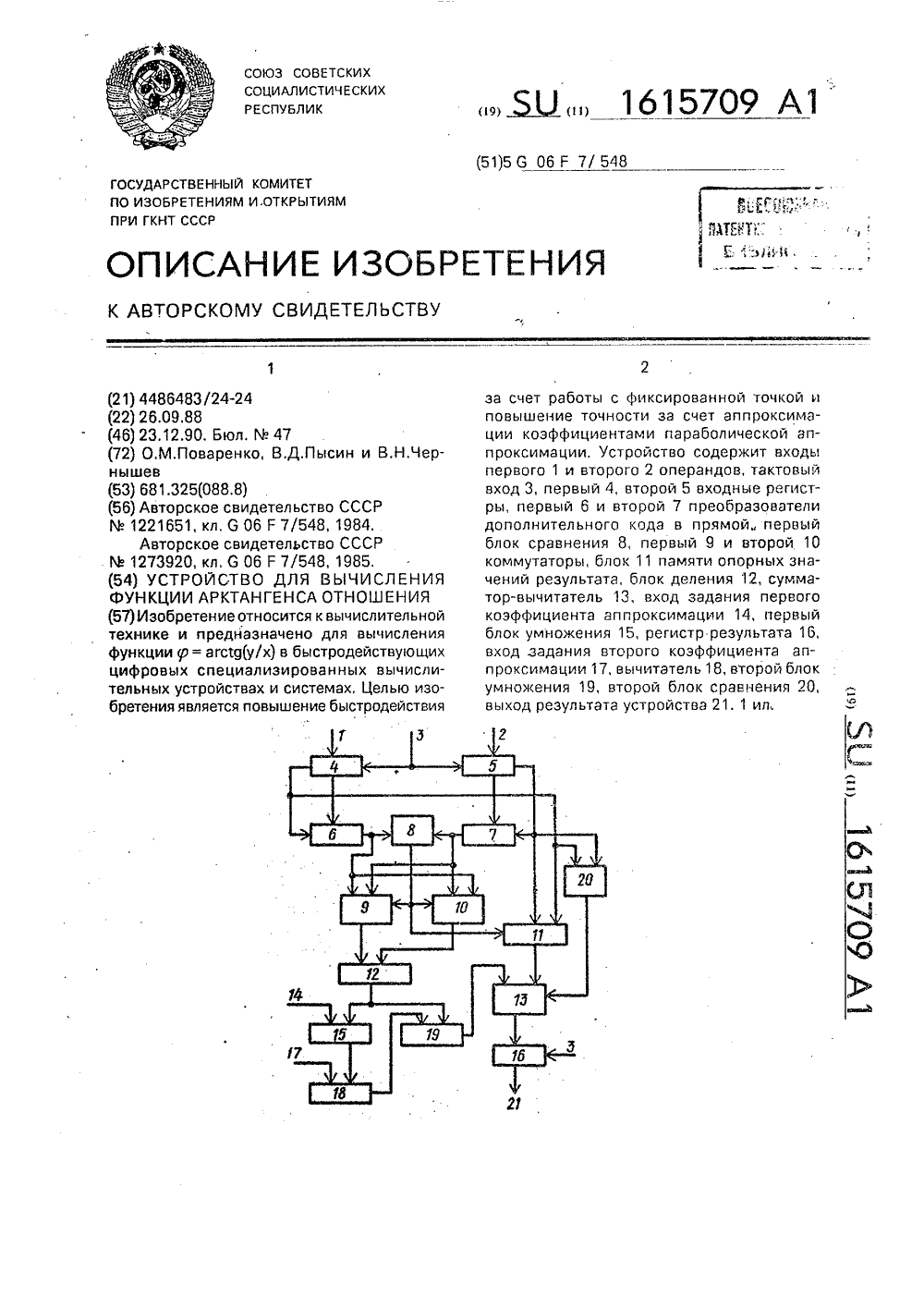
Опубликовано: 23.12.1990
Авторы: Поваренко, Пысин, Чернышев
МПК: G06F 7/548
Метки: арктангенса, вычисления, отношения, функции
...101 ления, два блока умножения, первый блок сравнения, два коммутатора, вычитатель, сумматор-вычитатель, причем выходы первого и второго коммутаторов соединены с входами соответственно делимого и делителя блока де ления, вход первого коэффициента аппроксимации устройства соединен с входом первого сомножителя первого умножителя, вход второго коэффициента аппроксимации устройства соединен с входом уменьшаемого 10 вычитателя, выход которого соединен с входом первого сомножителя второго умножителя, вход второго сомножителя которого соединен с выходом блока деления, выход второго умножителя соединен с пер вым информационным входом сумматоравычитателя, о т л и ч а ю щ е ес я тем, что, с целью повышения быстродействия за счет работы с...
Устройство для вычисления интервальной корреляционной функции

Номер патента: 1665387
Опубликовано: 23.07.1991
Авторы: Белолипецкий, Мирзаев
МПК: G06F 17/15
Метки: вычисления, интервальной, корреляционной, функции
...в соответствующий усредняющий регистр 9 по сигналам с соответствующего выхода дешифраторов 5, а затем в накапливающий сумматор 11 по тому же сигналу через элемент.10 задержки, Импульсы второй последовательности подаются на счетный вход счетчика 6. После поступления первого импульса в счетчике 6 образуется код 111.11112 (для двоичной системы исчисления), После прихода второго импульса на выходе переполнения счетчика б вырабатывается сигнал, который разрешает считывание в этот счетчик 6 кода из регистра 7, таким образом в счетчик 6 записывается код 111,. 1102. Одновременно этот же сигнал переполнения счетчика 6 поступает на вход сдвига регистра 7 и сдвигает его содержимое, Таким образом, в нем образуется код 1111002.После прихода...
Устройство для моделирования режимов работы гидростанции
Номер патента: 424183
Опубликовано: 15.04.1974
Авторы: Алексеева, Институт, Кантан, Ленинградский
МПК: G06G 7/57
Метки: гидростанции, моделирования, работы, режимов
...в обратных связях УП 1 инерционных звеньев 6 и 7 через ключи 4 и 5 заряжаются до величин напряжений, пропорциональных исходным отклонениям уровней верхнего и нижнего бьефов от соответствующих нулевых уровней.Далее происходит их разряд в соответствии с постоянными времени верхнего и нижнего бьефов.По команде блока управления с блока 1 на первый вход делителя 2 подается напряжение, пропорциональное мощности в предшествуюший час Р, ь а на второй вход - с сумматора 10 напряжение, пропорциональное напору Н,сверху. Напряжение с выхода делителя 2 подается на первый вход сумматора 11, на второй вход которого поступает напряжение с блока 3, Через промежуток времени Л 1 после начала разряда емкостей инерционных звеньев 6 и 7 напряжение с...
Предыдущий патент: Устройство для моделирования нейрона
Следующий патент: Устройство для выделения контура изображения
Случайный патент: Способ обнаружения дефектов сегнетоэлектрического носителя информации