Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 729545
Авторы: Андрюнин, Кулешов, Лысенко, Моисеенков, Шведов
Текст
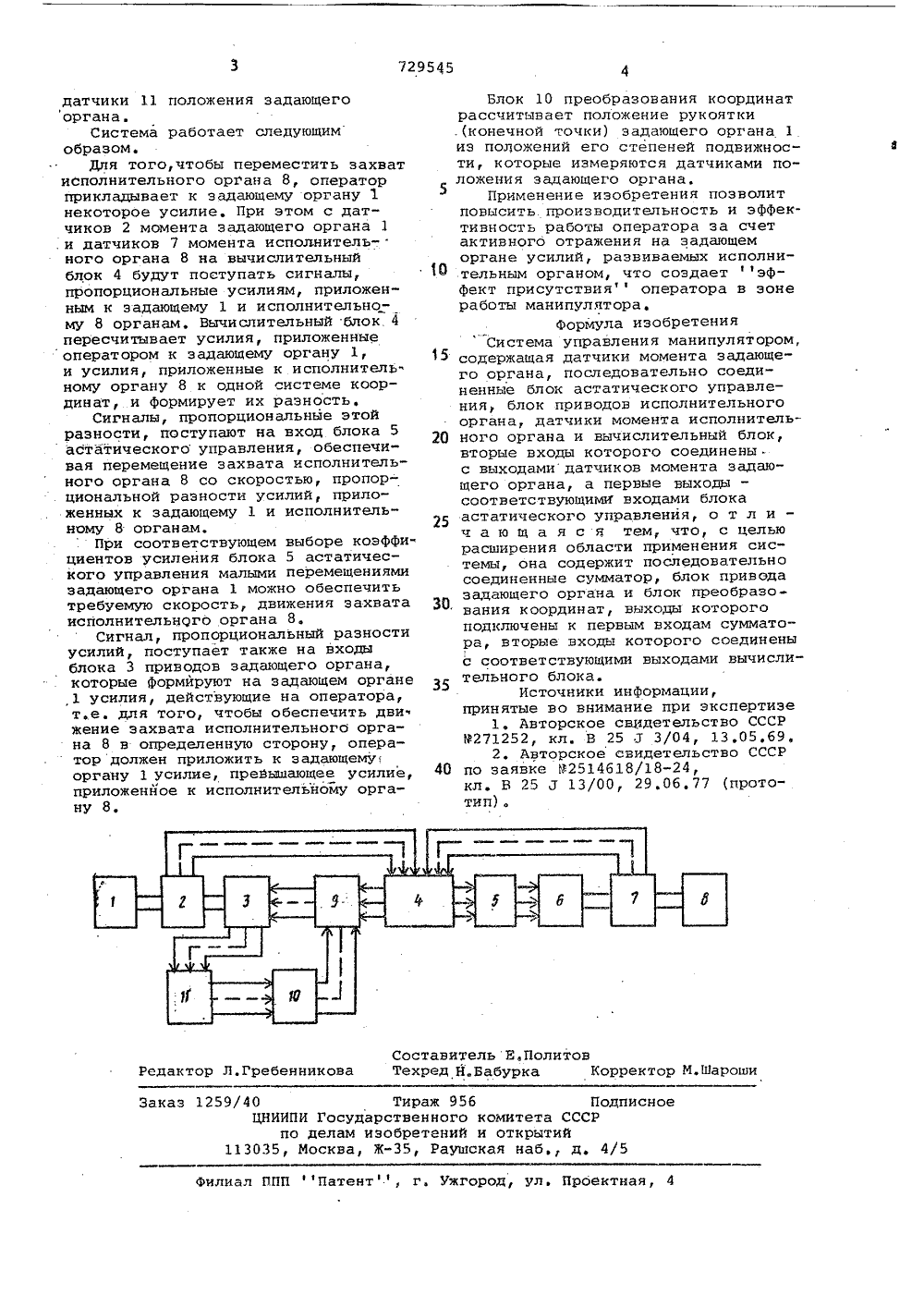
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советскик Социалистических Республик(22) Заявлено 3005.78 (21) 2623691/18-24 р)м2 с присоединением заявки Ио 6 05 В 11/00 В 25 У 13/00 Государственный комитет СССР по делам изобретений и открытий(72) Авторы изобретения Московское ордена Ленина и ордена Трудового Красного Знамени высшее техническое училище им. Э.Н.Баумана(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ Изобретение относится к робототехнике и может использоваться присоздании высокоточных и малогабаритных систем управления манипулятором.Известна система управления манипулятором, содержащая датчики усилийзадающего органа и последовательносоединенные блок астатического управления, блок следящих приводов и датчики усилий, исполнительного органа 1).Однако такая система не позволяетоператору дозировать усилия, развиваемые исполнительным. органом,Наиболее близким к предлагаемому 15изобретению система управления манипулятором, содержащая датчики момента задающего органа, последовательно соединенные блок астатическогоуправления, блок приводов исполнительного органа, датчики моментаисполнительного органа и вычислительный блок, вторые входы которогосоединены с выходами датчиков момента задающего органа, а первые выходы - с соответствующими входамиблока астатического управления (2),Эта система позволяет дозироватьусилия, развиваемые исполнительныморганом, Однако такая система не обладает свойством активного отраже.ния усилий исполнительного органа,что сужает круг операций, выполняемых манипулятором, и эффективноработает лишь при качественной визуальной обратной связи,Цель изобретения в ,расширениеобласти применения системй,Это достигается тем, что системасодержит последовательно соединенные сумматор, блок приводов задающего органа и блок преобразованиякоординат, выходы которого подключены к первым входам сумматора,вторые входы которого соединеныс соответствующими выходами вычислительного блока.На чертеже приведена функциональная схема системы управления манипулятором.Она содержит задающий орган 1, датчики 2 момента задающего органа,блок 3 приводов задающего органа, вычислительный блок 4, блок 5 астатического управления, блок 6 приводов исполнительного органа, датчики 7 момента исполнительного органа, исполнительный орган 8, сумматор 9, блок 10 преобразования координат,729545 оставитель Е,По ехред Н.Бабурка тов Корректор М.шарош едактор Л,Гребеннико аказ 1259 Тираж 95 б сударственного к ам изобретений и ва, Ж, Раушск Подписномитета СССРоткрытийя наб д, 4/5 ЦНИИПИ по 035, Милиал ППП Патент, г Ужгород, ул. Проектн датчики 11 положения задающегооргана,Система работает следующимобразом.Для того, чтобы переместить захватисполнительного органа 8, операторприкладывает к задающему органу 1некоторое усилие. При этом с датчиков 2 момента задающего органа 1.и датчиков 7 момента исполнительного органа 8 на вычислительныйблок 4 будут поступать сигналы,пропорциональные усилиям, приложенным к задающему 1 и исполнительному 8 органам, Вычислительный блок, 4пересчитывает усилия, приложенныеоператором к задающему органу 1,и усилия, приложенные к исполнитель.ному органу 8 к одной системе координат, и формирует их разность,Сигналы, пропорциональные этойразности, поступают на вход блока 5астатического управления, обеспечивая перемещение захвата исполнительного органа 8 со скоростью, пропорциональной разности усилий, приложенных к задающему 1 и исполнительному 8 органам.При соответствующем выборе коэффициентов усиления блока 5 астатического управления малыми перемещениямизадающего органа 1 можно обеспечитьтребуемую скорость, движения захватаисполнительного органа 8.Сигнал, пропорциональный разностиусилий, поступает также на входыблока 3 приводов задающего органа,которые формйруют на задающем органе1 усилия, действующие на оператора,т.е, для того, чтобы обеспечить дви.жение захвата исполнительного органа 8 в определенную сторону, оператор должен приложить к задающему,органу 1 усилие, преВышающее усилие,приложенйое к исполнительному органу 8,Блок 10 преобразования координатрассчитывает положение рукоятки.(конечной точки) задающего органа 1из положений его степеней подвижности, которые измеряются датчиками положения задающего органа.Применение изобретения позволитповысить. производительность и эффективность работы оператора за счетактивного отражения на задающеморгане усилий, развиваемых исполнительным органом, что создает эффект присутствия оператора в зонеработы манипулятора.Формула изобретенияСистема управления манипулятором,содержащая датчики момента задающего органа, последовательно соединенные блок астатического управления, блок приводов исполнительногооргана, датчики момента исполнитель 20 ного органа и вычислительный блок,вторые входы которого соединены .с выходамидатчиков момента задающего органа, а первые выходысоответствующими входами блокаастатического управления, о т л ич а ю щ а я с я тем, что, с цельюрасширения области применения системы, она содержит последовательносоединенные сумматор, блок приводазадающего органа и блок преобразования координат, выходы которогоподключены к первым входам сумматора, вторые входы которого соединеныс соответствующими выходами вычислительного блока.Источники информации,принятые во внимание при экспертизе1. Авторское свИдетельство СССР9271252, кл. В 25 Ю 3/04, 13.05.б 9.2. Авторское свидетельство СССР40 по заявке Р 2514 б 18/18-24,кл. В 25 д 13/00, 29,06,77 (прототип) .
СмотретьЗаявка
2623691, 30.05.1978
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
АНДРЮНИН ВАЛЕРИЙ ВИКТОРОВИЧ, КУЛЕШОВ ВЛАДИМИР СЕРГЕЕВИЧ, ЛЫСЕНКО СЕРГЕЙ АРКАДЬЕВИЧ, МОИСЕЕНКОВ ВАЛЕРИЙ АКСЕНТЬЕВИЧ, ШВЕДОВ ВАЛЕРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: манипулятором
Опубликовано: 25.04.1980
Код ссылки
<a href="https://patents.su/2-729545-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Устройство для компенсации статических моментов манипулятора

Номер патента: 881654
Опубликовано: 15.11.1981
Авторы: Березкин, Суслов, Шаров
МПК: G05B 11/00
Метки: компенсации, манипулятора, моментов, статических
...первого коммутатора 5 подключается сигнальный вход, соединенный с выходом вычислителя 3, соответствукнцимподключенному к первому выходу вычислителя 3 датчику 1. Сигналы с выходов первого коммутатора 5 поступают на входыпервого сумматора 6, на выходе которого формируется сигнал, пропорциональныйстатическому моменту от массы объекта,Оператор устанавливает ключ 7 в положение, при котором его контакты замкнуты, Сигнал с выхода первого сумматора6 поступает через замкнутые контактыключа 7 и второй сумматор 8 на вход интегратора 9, Выход интегратора 9 соединен с сигнальным входом второго коммутатора 10, на управляющий вход которогопоступает сигнал с выхода датчика 245 50 55 При освобождении схвата манипулято ра от объекта выходной сигнал...
Устройство для стабилизации среднего значения момента электродвигателя в приводах с циклической нагрузкой

Номер патента: 152014
Опубликовано: 01.01.1962
Автор: Гулько
МПК: H02P 5/00
Метки: значения, момента, нагрузкой, приводах, среднего, стабилизации, циклической, электродвигателя
...генератора и двигателя, МУ - дифференциальный магнитный усилитель, :ОМУ 1 и ОМУ 2 - обмотки управления усилителя, осуществляющие от:рицательную обратную связь по нагрузке, ОМУЗ - задающая обмоткамагнитного усилителя, ИО в измерительн орган, У в усилите, Ф - фильтр, П - потенциометр, К в полупроводников электрический вентиль.Обмотка ОУМ 1 включена через фильтр Ф, значительно ослабляющий колебания тока в обмотке, связанные с цикличносгью нагрузки. Вторая обмотка обратной связи ОУМ 2, действующая согласно с первой, включена через полупроводниковый вентиль на разность напряжений, пропорциональных мгновенному и среднему значению момента, так что ток в этой обмотке проходит только при превышении мгновенного значения момента определенной...
Датчик момента экстремума

Номер патента: 436298
Опубликовано: 15.07.1974
Автор: Коровин
МПК: G01R 19/04
Метки: датчик, момента, экстремума
...на счетчик 7, но последний переводится в режим вычитания тех же импуль:ов.В течение периода выходного сигнала преобразователя 1 на оба счетчика (7 и 8) поступают импульсы с генератора 9. По окончании периода очередной импульс с преобразователя 1 перебрасывает григгер 6, который при переключении переводит счетчик 8 в режущим вычитания, а счетчик 7 после сброса - в режим суммирования. При эгом если число, записанное в режиме суммирования в счетчике 8, будет меньше числа импульсов, поступввших на него в режиме вычитания (что соответствует увеличению длительности периода сигнала с преобразователя или, соответственно, уменьшению часготы), с выхода счетчика 8 через схему ИЛИ 10 на триггеры 11 и 12 поступает импульс переполнения, переводящий...
Датчик момента экстремума

Номер патента: 789905
Опубликовано: 23.12.1980
Авторы: Кобылкин, Латышев, Новиков, Сельский
МПК: G01R 29/02
Метки: датчик, момента, экстремума
...памяти 15.Датчик работает следующим образом.С выхода преобразователя 1 навходы блоков совпадения 2-4 поступаетимпульсный сигнал, модулированныйпо частоте. В зависимости от текущего состояния триггера б один изблоков совпадения (2 или 3) оказывается открытым и очередной импульсс преобразователя 1 поступает нацепь сброса одного из счетчиков(7 или 8). Допустим для определенности, что был открыт блок совпадения 2. Тогда импульс сбрасываетв исходное нулевое положение счетчик 8 и одновременно поступает нанижний вход триггера б, перебрасывая его в противоположное положение, при котором блок совпадения 3открывается и ждет поступления оче60 б 5 которых утеряны при обнулении реверсивных счетчиков 7 и 8 в последующее начало периода. Для...
Устройство для программного управления

Номер патента: 632989
Опубликовано: 15.11.1978
МПК: G05B 19/18
Метки: программного
...1 на величину 1, пропорциональную погрешности Л 5. Команда на выхаживание выдается в точке в, а заканчивается процесс обработки в точке о при полностью снятом припуске. С помощью блока сравнения 3 выдается команда на отвод шлифовального суппорта.Данное устройство позволяет повысить производительность обработки на 20/О при точности 45 мкм. Формула изобретения Устройство для программного управления, содержащее последовательно соединенные первый задатчик опорного напряжения, первый блок сравнения и исполнительный Олок, и датчик перемещения, выход которого подключен ко второму входу первого блока сравнения и через второй блок сравнения - ко второму входу исполнительного блока, отличающееся тем, что, с целью повышения точности...
Предыдущий патент: Способ получения фотографических изображений
Следующий патент: Устройство для управления приводом промышленного робота
Случайный патент: Масса для изготовления упаковочной бумагии картона