Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
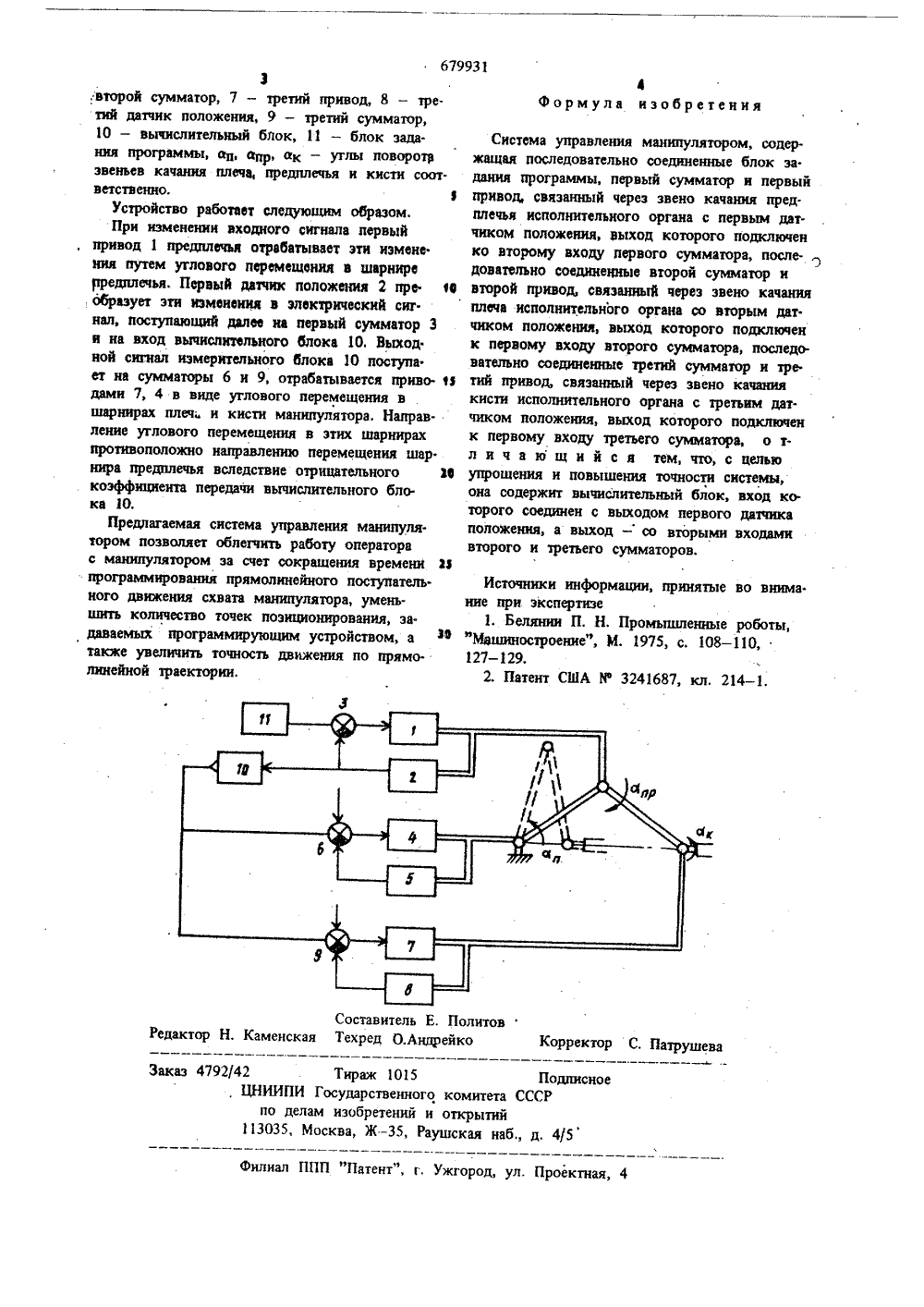
Союз Соввтских Свиалистмчвоэх РеспубликОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЙТВЛЬСТВУ(22) Заяв о 14.02.78ениеее заявк 1) М 05 В 1/25 1 3/00 рисо Гоеударотвеиный комитет СССР ко делам изобретеиий и открытийА. В. Артюхов, В дряшов и Л. Н. Петров конское ордена Ленина и ордена Трудового Красного Знамени высшее техническое училище им. Н; Э. Баумана аявител НИЯ МАНИПУЛЯТОРОМ ИСТЕМА УПР является повыш Изобретение относится к области манипуляторостроения и может быть использовано при создании систем управления манипуляторами.Известна система управления манипулятором, содержащая блок задания программы, сумматор, привод и датчик обратной связи по каждой регулируемой координате 111. Однако она имеет сложный процесс. программирования,Наиболее близким техническим решенюм к данному изобретению является система, содержащая последовательно соединенные блок задания программы, первый сумматор и первый привод, связанный через звено качания предплечья исполнительного органа с первым датчиком положения, выход которого подключен ко второму входу первого сумматора, последовательно соединенные второй сумматор и второй привод, связанный через звено качания плеча исполнительного органа со вторым датчиком положения, выход которого подключен к первому входу второго сумматора, последовательно соединенные третий сумматор и третий привод, связанные через звено качания кисти исполнительного органа с третьим датчиком положения, выход которого подключен к первому входу третьего сумматора 21,Недостатком такой системы является слож.ность программирования прямолинейного движения схвата манипулятора, так как при этомнеобходимо одновременно и синхронно форми.ровать управляющие сигналы для трех следящих приборов, Это требует использования трехзадатчиков управляющего сигнала, причем не.синхронное изменение сигналов с датчиковприводит к нарушению прямолинейносщ неремещения схвата.Целью изобретения ение точ.ности устройства,Сущность изобретения заключается в том,что оно содержит вычислительный блок, входкоторого соединен с выходом первогодатчикаположения, а выход - со вторыми входамивторого и третьего сумматоров.На чертеже, представлена функциональнаясхема системы управления манипулятором,где 1 - первый привод, 2 - первый датчикположения, 3 - первый сумматор, 4 - второйпривод, 5 - второй датчик положения; 6 -, ЦНИИПИ Государственного комитета СССР ло делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5,второй сумматор, 7 - третий привод, 8 - тре.тий датчик положения, 9 - третий сумматор,10 - вычислительный блок, 11 - блок задания программы, ап, апр, ак - углы поворотазвеньев качания плеча, предплечья и кисти соот.ветственно,Устройство работает следующим образом.При изменении входного сигнала первыйпривод 1 предплечья отрабатывает зги измене.ния путем углового перемещения в шарнирепредплечья. Первый датчик положения 2 пре 1образует зти изменения в электрический сигнал, поступающий далее на первый сумматор 3и на вход вычислительного блока 1 О. Выходной сигнал измерительного блока 10 поступа.ет на сумматоры 6 и 9, отрабатывается приво тздами 7, 4 в виде углового перемещения вшарнирах плеч и кисти манипулятора, Направление углового перемещения в этих шарнирахпротивоположно направлению перемещения шар.пира предплечья вследствие отрицательного Икоэффициента передачи вычислительного блока 10,Предлагаемая система управления мзнипуля.тором позволяет облегчить работу операторас манипулятором эа счет сокращения времени 33программирования прямолинейного поступательного движения схвата манипулятора, уменьшить количество точек позиционирования, задаваемых программирующим устройством, а Ззтакже увеличить точность движения по прямолинейной траектории. Система управления манипулятором, содержащая последовательно соединенные блок за.дания прогрзммы, первый сумматор и первыйпривод, связанный через звено качания предплечья исполнительного органа с первым датчиком положения, выход которого подключенко второму входу первого сумматора, после-,довательно соединепные второй сумматор ивторой привод, связанный через звено качанияплеча исполнительного органа со вторым датчиком положения, выход которого подключенк первому входу второго сумматора, последовательно соединенные третий сумматор и тре.тий привод, связанный через звено качаниякисти исполнительного органа с третьим дзт.чиком положения, выход которого подключенк первому входу третьего сумматора, о тл и ч а ю щ и й с я тем, что, с цельюупрощения и повышения точности системы,она содержит вычислительный блок, вход которого соединен с выходом первого датчикаположения, а выход - со вторыми входамивторого и третьего сумматоров,Источники информации, принятые во внима.ние при экспертизе1, Белянин П. Н, Промышленные роботы,"Мвшиностроение", И, 1975, с. 108 - 110,127-129,2. Патент США Нф 3241687, кл. 214 - 1.
СмотретьЗаявка
2581396, 14.02.1978
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
АРТЮХОВ АНАТОЛИЙ ВЛАДИМИРОВИЧ, КУДРЯШОВ ВЛАДИМИР БОРИСОВИЧ, ПЕТРОВ ЛЕОНИД НИКОЛАЕВИЧ
МПК / Метки
МПК: F04B 49/00
Метки: манипулятором
Опубликовано: 15.08.1979
Код ссылки
<a href="https://patents.su/2-679931-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Устройство включения ведомого звена исполнительного органа

Номер патента: 174917
Опубликовано: 01.01.1965
Автор: Специальное
МПК: F16D 41/064, F16H 29/00
Метки: ведомого, включения, звена, исполнительного, органа
...пружины заклиниомым звеном и неподвиж 174917показано стрелкой), сепаратор 2 с роликами 8 удерживается при помощи собачки Б, прижимаемой к храповику 4 пружиной б. При воздействии на собачку Б управляющего импульса в направлении стрелки собачка б повора,чивается на шарнире стойки 7 и выходит из зацепления с храповиком 4. Под действием упирающихся в ведомое звено 8 пружин 9 сепаратор 2 поворачивается и заклинивает ролики 8 между валом и ведомым звеном 8. Вращающийся вал увлекает за собой ведомое звено.Собачка Б при отпускании ее входит в зацепление с зубом храповика 4, и последний останавливается. При этом ведомое звено продолжает по инерции вращаться и выходит из зацепления с роликами, которые попадают в расширенную часть ведомого...
Привод электрического коммутационногоаппарата1изобретение относится к области электрете. хи и ки, в частности к приводам ко. ммутациовных электрических аипаратов, колтакты которых в крайних положениях замыкают

Номер патента: 420001
Опубликовано: 15.03.1974
Авторы: Галасюк, Савин, Сергиенко
МПК: H01H 33/38, H01H 33/46
Метки: аипаратов, замыкают, ко, колтакты, коммутационногоаппарата1изобретение, которых, крайних, ммутациовных, области, относится, положениях, привод, приводам, частности, электрете, электрических, электрического, •(ки»
...9. На валу 8 установлен диск 20, жестко связанный с храповиком и снабженный:пазаии 21 и 22, а на валу 5 - рычаг 23 с цилиндрическим рабочим участком 24, взаимодействующим с пазами.Привод работает следующим образом, При выключении электромагнита 1 его якорь 2 поворачивается и через тягу 3, рычаг 4, вал 5, колесо 6, шестерню 7 приводит в движение по часовой стрелке (направление движения звеньев на чертежах показано стрелками) рычаг 18 с собачкой 17, а через нее - храповик 19, вал 8 и, следовательно, кривошип 9.Кинематическая цепь выбирается таким образом, что за рабочий ход якоря 2,вал 8 поворачивается на 180. Кривошип 9 через шатун 10 и коромысло 11 приводит в движение вал 12 (контактоноситель), контакты 14 - 16 размыкаются, и...
Интегрирующий привод

Номер патента: 575621
Опубликовано: 05.10.1977
Авторы: Александров, Бригадинов, Нестеров
МПК: G05B 11/40
Метки: интегрирующий, привод
...ца чертеже.риоод содержит адаюц(ес 1 устройство 1,перый сумматор 2, первый усилитель,3,двигательс тахогенератором 5, редуктор6, корректирующий двигатель 7, выполненный о виде гидроиипицдра с поворотнойпопастью, и объект 8 регупирооацил . няизмере 11 я погрешности о угловом положециивходного и оыхопцого вапав редуктора устацопены первый Г) и второй 10 датчики угла и оторой сумматор 11. Ошибка рассогласования подается через второй усилитель р12 на энектрогидравпический преобразооагель 18,Устройство работает спедующим образом,ри подаче управляющего сигнала с устройства 1 на вход сумматора 2 на выходе 2двигателя 4 устанавливается некоторое постоянное значение скорости. Г:спи угловыеположения входного и выходного валов редуктора...
Устройство для управления дистанционным манипулятором

Номер патента: 582960
Опубликовано: 05.12.1977
Авторы: Баранов, Белоусов, Виноградов, Григалюк, Калинин, Софронов, Суслов, Шаров
МПК: B25J 11/00
Метки: дистанционным, манипулятором
...которого через последовательно соединенные электропривод и датчик угла задающего органа подключен ко второму входу вто рого сумматора, второй выход гидроприводасоединен со входом датчика угла исполнительного органа, а вйход датчика момента подключен ко второму входу первого сумматора.Источники информации, принятые во внимание при экспертизе:51. Авторское свидетельство СССР369020,кл, В 251/00, 971.2. Авторское свидетельство СССР499108,кл. В 25900, 1974. 12, электрогидроусилитель 13, гидропривод 14 идатчик давления 15 подключен ко второму входу первого сумматора 11, датчик угла исполни.тельного органа 6, вход которого подключен квыходу гидропривода 14, второй сумматор 17,первый вход которого подключен к выходу дат.чика 10 угла, а выход...
Устройство для управления электродвигателем постоянного тока

Номер патента: 780139
Опубликовано: 15.11.1980
МПК: H02P 5/16
Метки: постоянного, электродвигателем
...11 второго канала. Если напряжение рассогласования превышает пороговое, напряЖение О п квантователя 11 второго канала, тосигнал на сумматор 13 не поступает. Сигналы с блока 1 сравнения и с сумматора 13 поступают на выпрямители 15 и 16 и затем квантуются по уровню блоком квантователей 11. Пороговое найряжение Ц п квантователя 11 первого канала определяет допустимую статическую ошибку замкнутой системы. Пороговые напряжения остальных квантователей 11 устанавливаются автоматически в зависимости от скорости вращения исполнительного двигателя 4. Пороговое напряжение для каждого, позиционного квантователя 11, начинаясо второго, вырабатывается своей цепьюдинамической коррекции. К выходу позиционных квантователей 11, начиная со второго,...
Предыдущий патент: Устройство для переключения пневматических систем регулирования
Следующий патент: Устройство для управления приводами ковша экскаватора
Случайный патент: Центробежный пылеуловитель