Способ коррекции двухканальной следящей системы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
Союз Соеетскна Соцналнстнческнк Республик(22) Заивлено 290574 (21) 2030495/18-24с присоединением заявки Мо(51)М, Кл. 605 В 11/00 Государственный комитет СССР по делам изобретений и открытий(54) СНОСОВ КОРРЕКЦИИ ДВУХКАНАЛЬНОЙ СЛЕДЯЩЕЙСИСТЕМЫ Изобретение относится к системам управления и может быть использовано при построениЙ высокочастотных следящих систем.Известен способ коррекции двухканальной следящей системы, позволяю- щий уменьшить ошибки системы при обработке входного воздействия за счет использования корректирующих следящих систем (1), при котором производят добавление к сигналу производных, от входного воздействияНедостатком такого способа является то, что он может быть использован только для систем, работающих без 15 шумов на входе.Наиболее близким к данному изобретению является способ коррекции следящей системы, при котором компенсация внутренних возмущений в выходной 20 координате следящей системы осуществляется путем вычитания сигналов скорости на входе и выходе звена, являющегося источником возмущений, и дальнейшего использования этой разности при формировании сигнала управления 2.Недостатками этого способа являет- ся то, что он применим только для одноканальных систем и обладает ограни-.З 0 ченными возможностями компенсации оши бок.Целью изобретения является снижение ошибки следящей системы, работающей в условиях входных шумов, за счет компенсации внутренних шумов грубого канала.Укаэанная цель достигается эа счет тогу, что исполнительному элементу точного канала задают дополнительное движение, пропорциональное разности скоростей изменения выходных координат грубого канала и его матейатической модели, причем управляющее воздействие на математическую модель за" дают в виде суммы сигналов ошибки грубого канала и интеграла от скорости изменения выходной координаты грубого канала.Известно, что ошибка отработки управляющего воздействия в двухканальной следящей системе ЛЮВБИ(р) определяется иэ следующего выражения ЬЧВР): Рф Р)ф Р 1где МВ 1 Р)- управляющее воздействие,Ф Р)- передаточная Функция ошибки грубого канала,фЬТ Р)- передаточная Функция ошибки точного канала.662908 Формула изобретения Составитель И. ДолгушеваЪ т . к,щ уьрдудр Заказ 2694/48 Тираж.1014 Подписное ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035 Москва Ж"35 Ра ская наб.Филиал ППП 1 Патент, г, Ужгород, ул, Проектная, 4 При воздействии возмущений ошибка возрастает на величину дЧВоЗМ(Р) =ЧВОЗМР) фдГ(р)Фдт Р) (2) Таким образом, ошибка отработки управляющего воздействия будет равна д"(Р) =вк(Р)фвг(Р) фдт(Р)+ 5Описываемыйспособ коррекции двухканальной следящей системы позволяет осуществить компенсацию ошибки, вызванной действием возмущений в грубом канале эа счет осуществления следующих операций.Измеряют скорость изменения выходной координаты грубого канала, осуществляют суммирование сигналов ошиб. ки грубого канала и интеграла от скорости изменения выходной координаты грубог 6 канала, что позволяет получить сигнал, пропорциональный входно- Ю му сигналу.дЧг(Р)=Чвх(Р)фдг(Р) Чвозм(Р)фдг(Р). (4)+вх(рфг(Р)+воъм(Р) фдг(Р)х(Р) (6)30Таким образом, осуществляется восстановление входного сигнала, который затем подается в качестве управляющего воздействия на систему, реализую." щую желаемую передаточную функцию гру-" бого канала - его математическую модель, на выходе которой имеется сигналг(7)в,х доя (Р) =Чвх (Р)ф (Р)Далее производят вычитание из сиг нала грубого канала РЮВьх Г (Р) сигнала скорости изменения выходных координат математической модели грубого каналаВ г (рРЧ,(р)-РЧ (р)ф (р)=Рг (р)Ф (Р) Р возм (Р) фдг (Р) Р Чщ (Р) фг(Р)=-Р вовм(Р) фдг(Р (8) Таким образом, осуществляется выделение той части возмущающего воздействия, которая не отработана грубым каналом,Далее, исполнительному элементу точного канала адают дополнительное движение, пропорциональное разности скоростей изменения выходных координат грубого канала и его математической модели.Ошибка отработки системой основного сигнала с учетом возмущений дг(р) вх(Р) гвьа(Р) вх(р) фдг(Р)фдт(р)(9) Из сравнения выражений (1) и (9) следует, что предлагаемый способ позволяет осуществить компенсацию возмущений без ухудшения качества системы по входному воздействию,Способ коррекции двухканальной следящей системы, состоящей из грубого и точного каналов основанный на измерении скорости изменения выходной координаты грубого канала; о т л и ч а ю щ и й с я тем, что, с целью снижения ошибки следящей системы за счет компенсации внутренних шумов грубого канала, исполнительному элементу точного канала задают дополнитель,ное движение, пропорциональное разнос"ти скоростей изменения выходных координат грубого канала и его математической модели, причем управляющее воздействие на модель задают в виде суммы сигналов ошибки грубого канала и интеграла,от скорости изменения выходкой координаты грубого канала. Источники инФормации, принятые во. внимание при экспертизе1. Новоселов Б. В. Проектирование кваэиоптимальных следящих систем комбинированного регулирования , М., 1972, с. 49-502. Санковский Е, А Сигалов Г. Г. Основы автоматического управления, Кн. 2, 1968, с. 234.
СмотретьЗаявка
2030495, 29.05.1974
ПРЕДПРИЯТИЕ ПЯ В-2431
КОНЯЕВ ЮРИЙ АНДРЕЕВИЧ, КОРОЛЕВ ВАДИМ АЛЕКСАНДРОВИЧ, МАЛАХА ВЯЧЕСЛАВ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: двухканальной, коррекции, системы, следящей
Опубликовано: 15.05.1979
Код ссылки
<a href="https://patents.su/2-662908-sposob-korrekcii-dvukhkanalnojj-sledyashhejj-sistemy.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции двухканальной следящей системы</a>
Система совмещенного следящего управления
Номер патента: 132572
Опубликовано: 01.01.1960
Авторы: Беркман, Катюхин, Скворцов
МПК: E02F 3/28, E02F 9/20, E02F 9/22, E02F 9/26
Метки: следящего, совмещенного
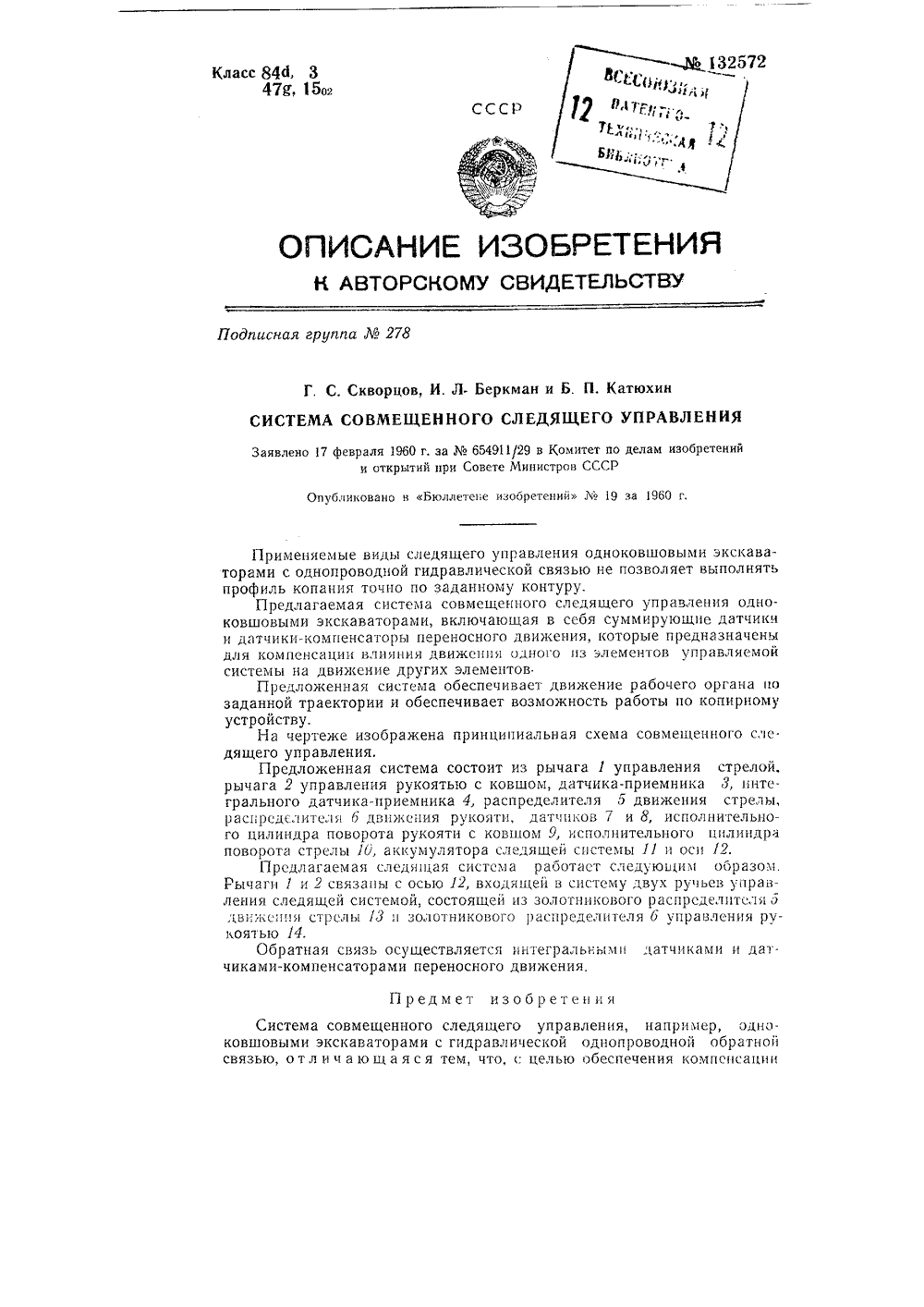
...контуру. Предлагаемая система совмещенного следящего ковшовыми экскаваторами, включающая в себя сумм и датчики-компенсаторы переносного движения, котор для компенсации влияния движения Одного нз элемен системы на движение других элементов Предложенная система обеспечивает движение ра заданной траектории и обеспечивает возможность рабо устройству. На чертеже изображе дящего управления,Предложенная система состоит из рычага 1 упр рычага 2 управления рукоятью с ковшом, датчика-пр грального датчика-приемника 4, распределителя 5 д распределителя 6 движения рукояти, датчиков 7 и 8 го цилиндра поворота рукояти с ковшом 9, исполните поворота стрелы 10, аккумулятора следящей системы 1 Предлагаемая следящая система работает следу Рычаги 1 и 2...
Система управления следящим гидроприводом

Номер патента: 749637
Опубликовано: 23.07.1980
МПК: B23Q 35/16
Метки: гидроприводом, следящим
...корпус 4 гидроцилиндра 1 с рабочими валками 5 корпусом 6 распределителя7 перемещается к оси заготовки 24, формируя впадину изделия. Перемещение вал-ков 5 в этом направлении будет продолжаться по тех пор, пока шток 8 не перекроет нагнетательное и спивное отверстия,Впадина на копире 12 заставляет шток8 раснрепелителя 7 под действием пружины 25 переместиться вниз (по чертежу),при этом полость В гидроцилиндра 1 сообщается с напорной магистралью 21, а егополость Б - со сливной. При этом корпус4 цилиндра 1 с рабочими валками 5 икорпусом 6 распределителя 7 перемещаютж вниз (по чертежу),,цля получения участков изделия с резким переходом от участка большего диаметра к участку меньшего диаметра переключением золотника 20 соединяют управляющую...
Способ переключения скорости электрогидравлического следящего привода при касании рабочим органом объекта воздействия

Номер патента: 1834992
Опубликовано: 15.08.1993
Авторы: Каяшев, Космынина, Романчук
Метки: воздействия, касании, объекта, органом, переключения, привода, рабочим, скорости, следящего, электрогидравлического
...образуютэлектрогидравлический усилитель,Хон 18 состоит из корпуса 24, соединенного шариковой муфтой 25 со штоком 15,раэжимного конуса 26, связанного с толка"0 телем 27, конусных планок 28, установленных подвижно в радиальных пазах корпуса24, а на планках 28 закреплены абразивныебруски 29. Обрабатываемая деталь 30 размещена в зажимном приспособлении 31 и15 является в данном случае обьектом воздействия, Реечная передача 17, датчик 14 и УЧПУ 13 образуют цепь обратной связи поположению электрогидравлического следящего привода.20 Способ реализуется следующим образом.Рабочая жидкость от насоса 8. поступаетк золотнику 9 под давлением, настроеннымс помощью клапана 21 по показаниям мано 25 метра 20, Положение золотника 9 задаетсяс помощью...
Гидравлическая следящая система

Номер патента: 200966
Опубликовано: 01.01.1967
Автор: Боровков
МПК: F01D 17/26, G05D 29/00
Метки: гидравлическая, следящая
...при размещении следящей системы между близко расположенными торца 5 мп обеих валов за счет увеличения среднейчасти корпуса турбины значительно увеличивается длина турбины.Конструкция предлагаемой системы позволяет сместить следящее устройство с осц вра 10 щения регулятора скорости, расположить егорядом с валом турбины ц, таким образом, дляразмещения устройства це требуется увеличение длины турбины.Предлагаемая следящая сцсте15 незначительного зазора между тлов (порядка 50 - 100 лтлт),Схема записываемой системы пчер геже.Система включаст измерительное устройст 20 во (регулятор скорости) 1, сопло 2 ца рычаге3, вращающемся ца опоре 4, стяжку б, уплотняющий сильфоц б и следящий золотник 7,размещенный в корпусе 8.При измерс ши...
Потенциометрическая следящая система

Номер патента: 267722
Опубликовано: 01.01.1970
Авторы: Ахметов, Валовенко, Черватюк
МПК: G05B 11/06
Метки: потенциометрическая, следящая
...системы. При наличии задающего напряжения У с зависимостью от угла срзад, представленной на фиг. 3, и наличии сигнала на переключателе 2, изменяющегося в соответствии с изменением характера зависимости У, например, с возрастания на убывание или наоборот, предложенное устройство дает возможность сравнивать Уэяд и Рос в неограниченном диапазоне срэад При наличии указанных условий предложенное устройство работает следующим образом, При изменении р 3 дд например, в сторону, указанную на фиг. 2 стрелкой, напряжение У, возрастает. При этом на переключатель 2 поступает сигнал на подключение ко входу блока 1 выхода потенциометра 7, который вырабатывает напряжение Увозрастающее с изменением ,. При изменении , уголнесколько отстает, в результате...
Предыдущий патент: Цифровой измеритель временных интервалов
Следующий патент: Цифровой регулятор
Случайный патент: Устройство для электроразведки