Способ коррекции систем автоматического регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
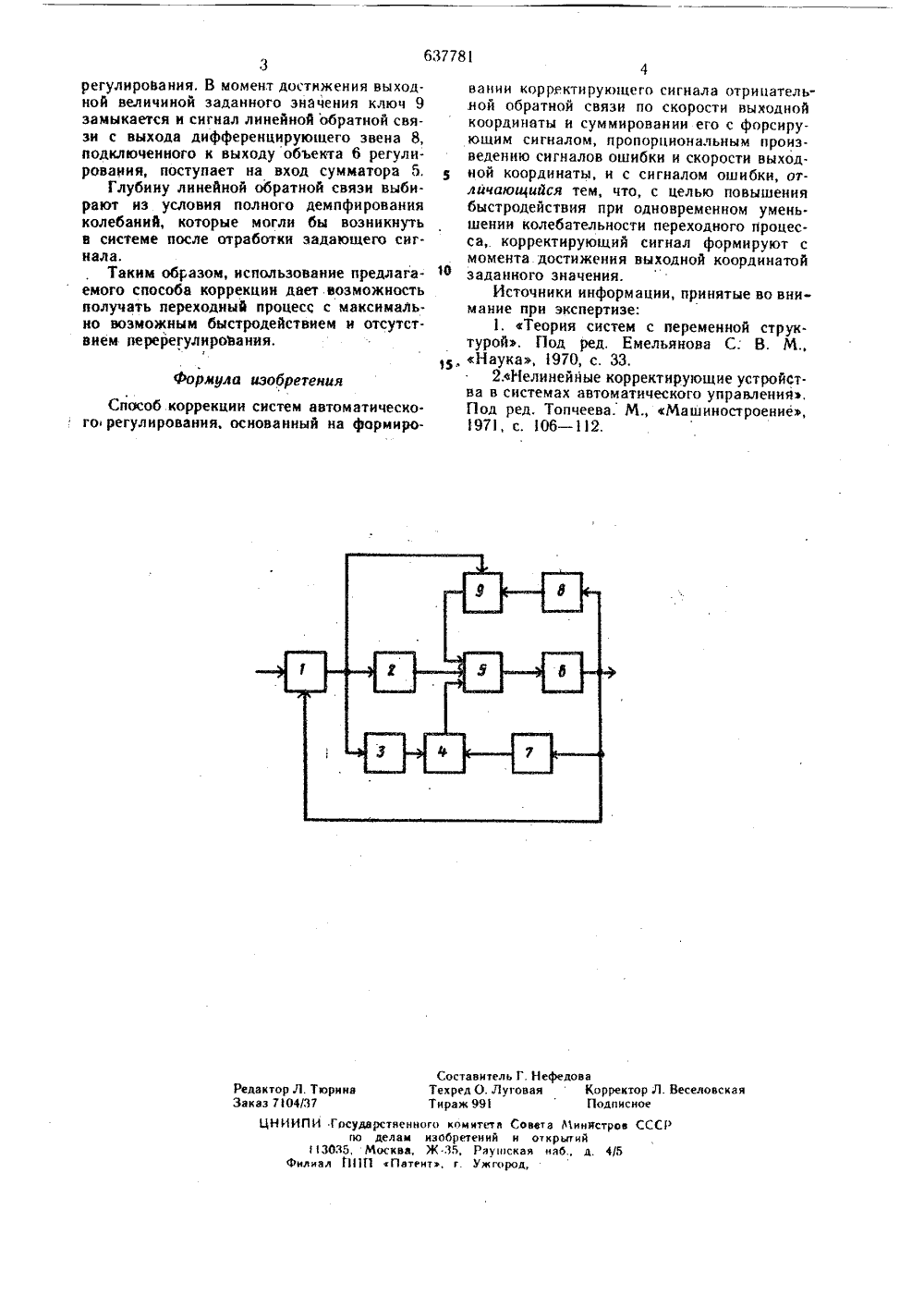
Союз СоветскихСоциалистическихРеспубпик 1 637781 Дополнительное к авт. свндву явлено 19.11. 76 (21) 2421717/18(51) М. Кл, С 05 В 11/00 присоединением заявки-асударственнвй комитеСовета Министров СССРио делан изобретенийи отиритий46) Дата опубликования описания 20.12.772) Авторы изобретен М. Грвнфел Н. Ионо омсомольскяч-на-Амуре политехнический инстят витель РРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСК РЕГУЛИРОВАНИЯ(54) С быстродействия прн од. шенин колебательностн са корректирующий снгИзобретенне относится к нелинейной коррекция динамических свойств систем автоматического регулирования.Известен способ коррекции систем регулирования, основанный на формировании в заданный момент времени сигнала производнон от ошибки снстемы регулирования н суммировании его с сигналом ошибки 111. Однако известный способ не обеспечивает максимально возможной форснровкн прн разгоне исполнительного устройства. Наиболее близким к изобретению по технической сущности является способ коррекция систем автоматнческого регулирования, основанный на формировании корректирующего снгнала отрицательной обратной связи по скоростн выходной координаты н суммировании его с форсирующим сигналом, пропорциональным произведению сигналов ошибки н скорости выходной координаты, н с сигналом ошибки 2). Этот известный способ не обеС- печивает высокого быстродействия из-за действня корректирующего сигнала на участке разгона.Для повышенииновременном уменьпереходного процес 2нал формируют с момента достнження выходной координатой заданного значения.На чертеже приведена блок-схема снстемы с коррекцией предлагаемым способом.Система содержит элемент 1 сравненнязадающего сигнала н сигнала главной обратной связи, усилитель 2 в канале ошибки, усилитель 3 в канале нелинейной обратной связи, блок 4 умножения, сумматор 5; объект б регулирования, днфференцнрующее звено 7 в канале нелинейной обратной связи, 1 в днфференцнруюшее звено 8 в канале линейной обратной связи и ключ 9.В начальной фазе отработки задающегосигнала ключ 9 разомкнут, что препятствует прохождению сигнала с выхода днфференцируюшего звена 8 на вход сумматора 5.1 З Прн этом на вход сумматора 5 через усилитель 2 подается сигнал ошибки, формнруемый на выходе элемента 1 сравнения задающего сигнала н сигнала главной обратной связи, и сигнал нелинейной коррекции, снио маемый с выхода блока 4 умножения, навходы которого подаются сигнал ошибки с выхода элемента 1 через усилитель 3 и сигнал с выхода дифференцируюаего звена 7, подключенного к выходу объекта 6637781 3регулирования. В момент достижения выход. ной величиной заданного значения ключ 9 замыкается и сигнал линейной обратной связи с выхода дифференцируюгцего звена 8, подключенного к выходу объекта 6 регулирования, поступает на вход сумматора 5,Глубину линейной обратной связи выбирают из условия полного демпфирования колебаний, которые могли бы возникнуть в системе после отработки задающего сиг. нала.Таким образом, использование предлагаемого способа коррекции дает возможность получать переходный процесс с максимально возможным быстродействием и отсутствием перерегулирования,формула изобретенияСпособ коррекции систем автоматического регулирования, основанный на формированин корректирующего сигнала отрицательной обратной связи по скорости выходной координаты и суммировании его с форсирующим сигналом, пропорциональным произведению сигналов ошибки и скорости выходной координаты, и с сигналом ошибки, отличающийся тем, что, с целью повышения быстродействия при одновременном умень.шенин колебательности переходного процесса, корректирующий сигнал формируют с момента достижения выходной координатой 16 заданного значения.Источники информации, принятые во внимание при экспертизе:1. Теория систем с переменной структурой. Под ред, Емельянова С; В. М., 1, Наука, 1970, с. 33.2.Нелинейные корректирующие устройства в системах автоматического управлений, Под ред, Топчеева. М Машиностроение, 971, с. 106 - 112.(ю1130 з 5,Филиал ПП Составитель Г. НефедоваТехред О. ЛуговаяКорректорТираж 991 Подписноетвенного комитета Совета Министров ССлам изобретений н открытийква, Ж ЗЬ, Раунсная наб., д. 4/5Патента. г. Уж город,Веселовск
СмотретьЗаявка
2421717, 19.11.1976
КОМСОМОЛЬСКИЙ-НА-АМУРЕ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ИОНОВ АНАТОЛИЙ НИКОЛАЕВИЧ, ГРИНФЕЛЬД ГРИГОРИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 11/00
Опубликовано: 15.12.1978
Код ссылки
<a href="https://patents.su/2-637781-sposob-korrekcii-sistem-avtomaticheskogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции систем автоматического регулирования</a>
Устройство адаптивной коррекции сигналов в дискретных каналах связи

Номер патента: 650234
Опубликовано: 28.02.1979
МПК: H04B 3/04
Метки: адаптивной, дискретных, каналах, коррекции, связи, сигналов
...Т 1 и такт Т 2 (фиг. 2 б, в). С инвертора 11 импульсы поступают на формирователь 12, на выходе которого формируются тактовые импульсы, приведенные на фиг. 2 г.Фиксация искажения единичного импульса помехой осуществляется внешним устройством (не показано), в котором формируется оценка каждого единичного элемента. Фиксация искажения единичного элемента производится на интервале т,10 15 20 25 30 35 40 45 50 55 60 65(фиг. 2 а, б, в) т = т - с где т - длительность единичного элемента, т - длительность тактового импульса (тт) для каждого единичного элемента. Сигнал, определяющий ошибку в единичном элементе, поступает на вход 17 статического триггера 13, который при этом срабатывает (фиг. 2 д).На фиг. 2 в качестве примера показано наличие...
Способ формирования сигнала ошибки идентификации динамических систем
Номер патента: 455325
Опубликовано: 30.12.1974
МПК: G05B 23/00
Метки: динамических, идентификации, ошибки, сигнала, систем, формирования
...этот способ не обеспечивает высокой 15 точности из-за использования пропорциональных умножителей, перемножающих сигналы, пропорциональные подстраиваемым параметрам, на сигналы фильтров.Цель изобретения - повышение точности 20 формирования сигнала ошибки, упрощение и повышение универсальности способа для применения его при контроле как линейных стационарных объектов с дробно-рациональными передаточными функциями, так и нестацио нарных и некоторых нелинейных объектов, контролируемых как самостоятельно, так и в комплексе с известными звеньями.Это достигается путем перемножения релейного зондирующего сигнала на сигналы, про- зО порццоцальные подстрацваемым параметрам, по результатам перемножения зондирующего сигнала на сигналы,...
Устройство подавления флуктуаций фазы линейного сигнала систем связи с временным уплотнением

Номер патента: 482909
Опубликовано: 30.08.1975
МПК: H04B 15/02
Метки: временным, линейного, подавления, связи, сигнала, систем, уплотнением, фазы, флуктуаций
...применяться в трактахраторов,о устройство подавлениялинейного сигнала систуплотнением, содержащю линию задержки и схеом. известного устройстная устойчивость рабония при преобразованииимпульсов.зобретения яви тракта хрон ескои свя ронирова Изобреи и може флуктуам связи с 5 ее секциому ИЛИ.а является ы трактапоследова ышение усвляется поирования. Эта целдены узльционировадовательнключеныИЛИ, одругими вся входом го, что вве отводы секерез после- ПРЕТ поддам схемыбъединен с 20и являеть достигается за счет то 1 ЗАПРЕТ, при этом иной линии задержки ч о соединенные узлы ЗА к соответствующим вхо дин из входов которой о ходами узлов ЗАПРЕТ устройства. Предмет изобретенияУстройство подавления флуктуаций фазы линейного сигнала систем связи с...
Устройство для усиления и формирования выходного сигнала фотодиода

Номер патента: 1394196
Опубликовано: 07.05.1988
МПК: G03B 7/08
Метки: выходного, сигнала, усиления, формирования, фотодиода
...устройствам передачи информации.Целью изобретения является увели 5чение помехозащищенности и быстродействияеНа чертеже представлена схема устройства.1 ОВыход устройства связан с выходомоперационного усилителя 1 через резистор 2. Катод и анод фотодиода 31оединены соответственно с неинверирующим и инвертирующим входами усиителя 1,. которые подключены черезрезисторы 4 и 5 соответственно к по 1 ожительной и отрицательной шинам истоннина питаний, Выхол Усилители 1оединен через резистор 6 с его невертирующим входом, подключеннымерез резистор 7 к инвертирующемувходу.Устройство работает следующим образом. 25При затемненном фотодиоде 3 падение напряжения на резисторе 7 усФанавливает выходное напряжение усилителя 1, близкое к...
Устройство для автоматического регулирования коэффициента передачи для многоканальных систем передачи сигнала

Номер патента: 1075371
Опубликовано: 23.02.1984
МПК: H03G 1/04
Метки: коэффициента, многоканальных, передачи, сигнала, систем
...дополнительного пороговогоэлемента и другим входом элементаИЛИ включен элемент НЕ,На чертеже представлена структур"ная электрическая схема предложенного устройства.Устройство автоматического регулирования коэффициента. передачи длямногоканальныМ систем передачи сигнала содержит элемент 1 с регулируемым коэффициентом передачи, усилитель 2, исполнительный блок 3,. приемник 4 контрольного сигнала, пороговый элемент 5, элемент ИЛИ 6,. гене"ратор 7 импульсов, трехвходовый эле-мент И 8, дополнительный пороговыйэлемент 9, элемент НЕ 10, двухвходовый элемент И 11 и элемент 12 задержки,Устройство работает следующимобазам.Сигнал контрольной частоты с выхода усилителя 2 поступает на входприемника 4. Выпрямленный сигналконтрольной...
Предыдущий патент: Способ растровой электрофотографии
Следующий патент: Самонастраивающаяся система управления суппортом станка
Случайный патент: Устройство для автоматического разгона и замедления в системах программного управления станками