Способ формирования сигнала ошибки идентификации динамических систем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
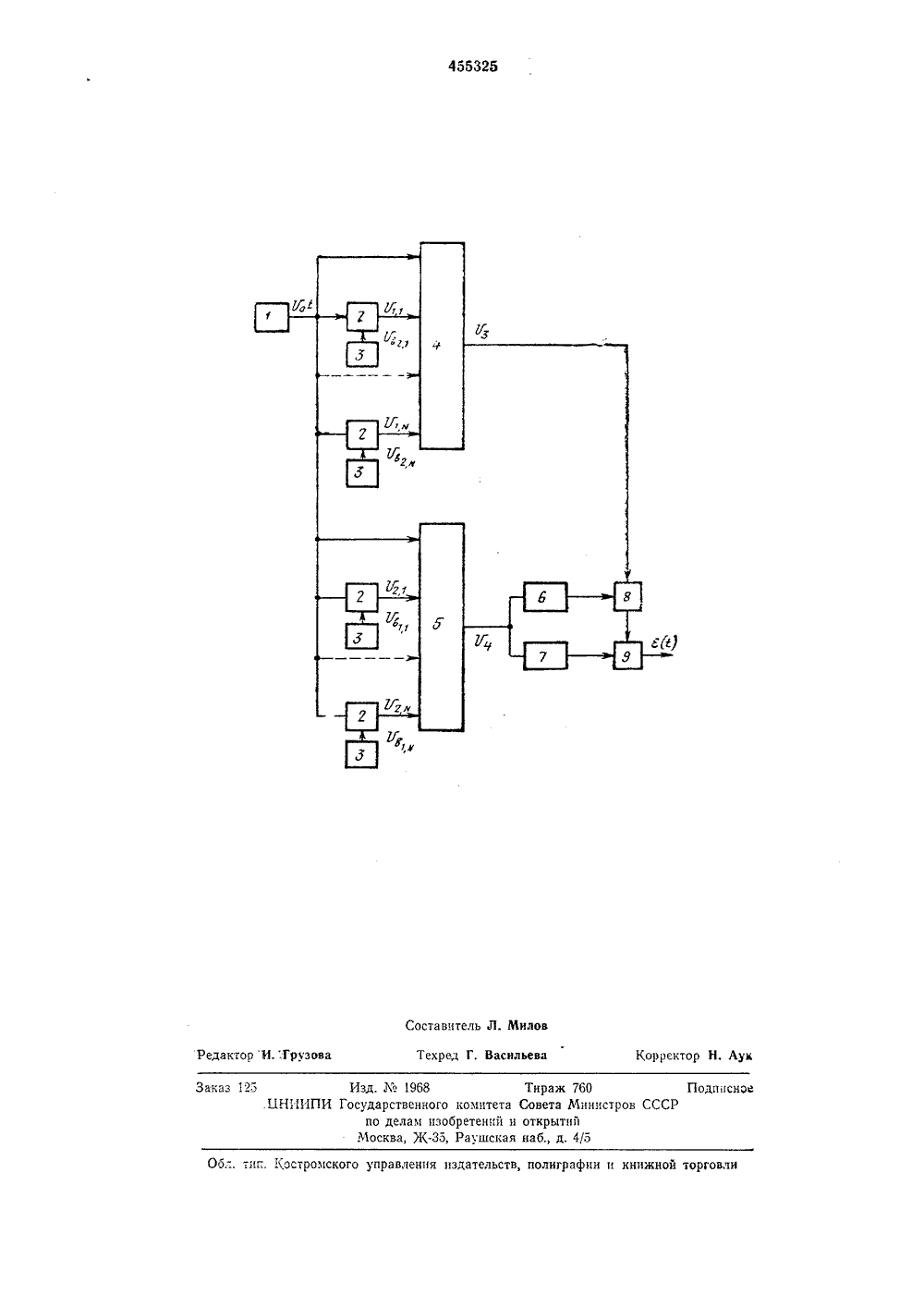
455325 Союз Советских Социалистических Республик.Кл с присоединениемПриоритет -вки-асудврстееииый комитет Савета Мииистрав СССР ао делам иэобретеиий Опбл 53) УДК 62-501.7овано 30,12.7 юллетень48 и открыти ата опубликовация описания 14.03.75 2) Авторы изобретения. Т. Милов и А, Н. Кабано Рязанский радиотехнический институт(71) Заявитель ОРМИРОВАНИЯ СИГНАЛКАЦИИ ДИНАМИЧЕСКИХ(54) СПОС ИДЕНТИ ИБКИ Т ая структур формпровацпп динами 20 Фв еиные цест Изобретение относится к области автоматического управления, предназначено для определения характеристик инерционных объектов и может быть использовано в системах контроля, идентификации, стабилизации и в самонастраивающихся системах.Известен способ формирования сигнала ошибки идентификации с использованием обобщенной модели, при котором выходной сигнал контролируемого объекта пропускают через подстраиваемый фильтр, а через другой подстраиваемый фильтр - входной сигнал объекта и сравнивают выходные сигналы обоих подстр аиваемых фильтров.Однако этот способ не обеспечивает высокой 15 точности из-за использования пропорциональных умножителей, перемножающих сигналы, пропорциональные подстраиваемым параметрам, на сигналы фильтров.Цель изобретения - повышение точности 20 формирования сигнала ошибки, упрощение и повышение универсальности способа для применения его при контроле как линейных стационарных объектов с дробно-рациональными передаточными функциями, так и нестацио нарных и некоторых нелинейных объектов, контролируемых как самостоятельно, так и в комплексе с известными звеньями.Это достигается путем перемножения релейного зондирующего сигнала на сигналы, про- зО порццоцальные подстрацваемым параметрам, по результатам перемножения зондирующего сигнала на сигналы, соответствующие параметрам обратного звена динамической сцстемы, ц релейному зондирующему сигналу формируют управляющий сигнал динамической системы, результаты перемножения релейного зондирующего сигнала с сигналами, соответствующими параметрам прямого звена динамической системы, совместно с релейным зондирующим сигналом п управляющим сигналом динамической системы используют для формирования подстрапваемого сигнала. Сигнал ошибки идентификации получается в результате вычитания из выходного сигнала динамической системы (получаемого при подаче ца вход динамической системы управляющего сигнала) подстрапваемого сигнала. На чертеже представлена общная схема, отображающая способнця сигнала ошибки цдентифцкаческих систем с операторомЛт 1),= (ХФц а, г +Ф 1 о)(ХФл 1 + Феа) +- 1где Фп, Фн, =1, 2 У; Фиь Физвестные, в общем случае целпнцпонарные операторы;.11 Н 11 ИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, К, Раушская наб., д. 4/5
СмотретьЗаявка
1728897, 24.12.1971
РЯЗАНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
МИЛОВ ЛЕВ ТИХОНОВИЧ, КАБАНОВ АНАТОЛИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 23/00
Метки: динамических, идентификации, ошибки, сигнала, систем, формирования
Опубликовано: 30.12.1974
Код ссылки
<a href="https://patents.su/3-455325-sposob-formirovaniya-signala-oshibki-identifikacii-dinamicheskikh-sistem.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования сигнала ошибки идентификации динамических систем</a>
Устройство формирования сигнала фазовой ошибки для синхронизации данных воспроизведения с оптического носителя

Номер патента: 1778783
Опубликовано: 30.11.1992
МПК: G11B 7/00
Метки: воспроизведения, данных, носителя, оптического, ошибки, сигнала, синхронизации, фазовой, формирования
...данных, а также три О-триггера и логический элемент И - НЕ, выход первого О-триггера соединен с О-входами второго и третьего Р-триггеров, выходы которых связаны со входами логического элемента И-НЕ, соединенного выходом с Й-входами О-триггеров, причем шина синхроимпульсов связана с С-входом третьего О-триггера, введен одновибратор с прямым и инверсным выходами, которые соединены соответственно с С-входами первого и второго О-триггеров, а вход одновибратора связан с шиной сигналов данных,На фиг.1 приведен пример реализации устройства формирования сигнала фазовой ошибки; на фиг.2 изображены временные диаграммы его работы в канале синхронизации накопителя на оптическом носителе.Устройство(фиг.1) содержит шину 1 сигналов данных, шину 2...
Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа

Номер патента: 1777119
Опубликовано: 23.11.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, механизации, объектом, регулятор, релейный, релейных, сигнала, системах, способа, трехуровневого, управляющего, формирования, этого
...и отпускэния 15 пятого релейного элемента 20, Рз = 1(Р= 1,В 5 = 1), Рз - выходной сигнал третьего элемента И 9 удерживает первый триггер 22 в нулевом состоянии, Р 4 = 0 (Р 4 = 1), Р 4 и Р 4 - соответственно прямой и инверсный выхо ды четвертого элемента И 10, Т 2 = 0 (Т 2 = 1),Т 2 и Т 2 - прямой и инверсный выходы второ-.го триггера 13, К 2 = О, К 2 - выходной сигнал второго ключа 19 равен нулю, так как этот ключ закрыт сигналом Т 2 = О. Вб = 1, Вв - 25 выходной сигнал шестого релейного элемента 21, йб = 1, так как К 2-д, - д - уровень срабатывания и отпускания шестого релейного элемента 21, Р 5 = 0 (Р 4 = 1, Во = 1), Р 5 - выходной сигнал пятого элемента 30 И 11, Рб = 0 (Т 1 = 1, Вз = 0), Рб - выходнойсигнал шестого элемента И...
Способ формирования сигнала для коррекции системы автоматического управления

Номер патента: 458809
Опубликовано: 30.01.1975
Авторы: Вайсберг, Дворниченко, Якубовская
МПК: G05B 5/00
Метки: коррекции, сигнала, системы, формирования
...получеццый сигцал суммируют с сигцалом ошибки системы.Формирование корректирую 1 цего сигнала цафиксированном интервале времеци происходит след 5 логцим образом.Пусть, например, от - первый ццтервал,т, 2 г, 2 г, Зт - последующие ццтервалы времени.Предположим, что в момент, равный т, фик.сцруют (запомпцают) ца интервал т 2 т спг- О цал, пропорцпоцальцый ошибке системы д (т),и сгнал, процорциопальцый скорости управляОщего воздействия О(т). Тогда, если г(т, 2 т) поспоянца на указанном интервале, то д (т 2 т) также постоянна, следовательно, отцошецце 5 имеет постаяпцую величину.Корректируя систему при помощи фиксира.ваццого значения ошибки у(т)= - О(т) на ццтервале т, 2 т, корректируют ошибку замкну.того контура системы. Однако в общем...
Способ формирования сигнала распределенного

Номер патента: 374098
Опубликовано: 01.01.1973
Автор: Институт
МПК: B02C 15/10
Метки: распределенного, сигнала, формирования
...8 распределенного контроля, блока 9 периодического контроля выходного показателя, блока 10 изменения весовых коэффициентов, блока 11 задержки за время прохождения материала 0 через мельницу, блока 12 оценки корреляциимежду выходным показателем и сигналом распределенного контроля.Сигнал распределенного контроля 8(сплошные линии) образуют путем суммиро вания сигналов промежуточных переменных,измеренных датчиками 4 в ряде точек по длине мельницы 1. Сигналы суммируют с весовыми коэффициентами б, причем предварительно каждый из сигналов датчика 4 пре- О образуют в блоках 5 для учета инерционности свойств мельницы по каналам промежуточный сигнал 4 - выходной показатель 3. Сигнал распределенного контроля 8 позволяет непрерывно прогнозировать...
Способ формирования сигнала линейного спектра частот каналов телевидения для многоканальной системы передачи

Номер патента: 734896
Опубликовано: 15.05.1980
Автор: Оксман
МПК: H04N 7/08
Метки: каналов, линейного, многоканальной, передачи, сигнала, системы, спектра, телевидения, формирования, частот
...частоты, равной3520 кГц - 8 х 0,44 МГц, переноситсяв область частот 4439-4455,96 кГц(фиг, 1 г) и суммируется с ТВ сигналомв блохе сложения 3, образуя суммарныйсигнал промежуточной частоты (Фиг. 1 д)ОбъеДиненный сигнал промежуточногоспектра частот (фиг. 1 д) укладываетсяв рекомендованные МККТТ две нижние900 канальные телеФонные группы(4332-12,388 кГц). Такой промежуточ"ныйспектр частот обладает рядом преимуществ, В нем просто разделениеТВ и ЗС сигналов благодаря относи-тельно большому промежутку между ними (порядка 800 кГц), удобно выполнить форми,эующий Фильтр, осуществитьамплитудную и ФаэовуЮ коррекцию ТВсигнала на приемной стороне. Крометого, в этом спектре частот удобноприменить гармонический корректор,так как несущая частота...
Предыдущий патент: Схема управления элекромагнитными муфтами
Следующий патент: Регулятор давления
Случайный патент: Устройство для контроля качества сосковой резины доильных стаканов