Устройство для управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
О Л И С А Н И Е. ЙЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(61) Дополнительное к авт. свид-ву(22) Заявлено 141076 (21) 2416965/25-24с присоединением заявки (51) М. Кл. В 25 д 9/00 Государственны й ком и тетСовета Ми вист ров С С С Р(45) Дата опубликования описания 300678(54) УСТРОИСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ 10 Изобретение относится к области радиотехники и может быть использовано для управления микропрограммными роботами со сложной кинематической схемой.Известно устройство для управления проьюшленным роботом, содержащее пульт программного управления, приводы, лрограммоноситель, датчики положения исполнительного органа)1, Это устройство требует большого объема памяти и имеет невысокую точность позиционирования,Наиболее близким техническим решением к данному изобретению является устройство, содержащее последовательно соединенные блок памяти и блок считывания программы и ло каждой регулируемой координате последовательно Ж соединенные сумматор, привод, исполнительный механизм и датчик положения исполнительного механизма, выход которого подключен к первому входу сумматора)21 . Недостатком этого устройства является наличие интерполятора, представляющего собой сложное вычислительное устройство,Целью изобретения является упрощение и повышение помехоэащищенностиустройства.Это достигается тем, что устройство содержит последовательно соеди-.ненные микролриводы, редукторы, физическую модель исполнительного механизма робота и датчики положения физической модели, выходы которых лодключе"ны ко входам соответствующих сумматоров, а входы микролриводов соединены с соответствующими выходами блока считывания программы,На чертеже представлена блок-схема устройства, на котором показаныблок памяти 1, блок считывания программы 2, микролриводы 3, редукторы4, физическая модель 5, датчики положения 6 физической модели, сумматоры 7, приводы 8, исполнительный механизм робота 9, датчики положения исполнительного механизма 10.Устройство работает следующим образом,Координаты перемещений из блокапамяти 1 считываются блоком.считывания программы 2, обрабатываются микролриводами 3, которые через редукторы 4 приводят в движение в програм"мируемом направлении базовую точку619331 Формула изобретения Составитель Е.ПолитовРедактор Н.Каменская Тех е З.фанта Заказ 4349/12 Тираж 1122 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений н открытий 113035 Москва ЖРа ская б 4 5Филиал ППП "Патентф, г. Ужгород ул. Проектная, 4 физической модели 5, соответствующую,например, схвату исполнительного механизма робота 9. При этом звенья физической модели 5 совершают движениепо сложной траектории. Датчики положения Физической модели 6 вырабатывают информаций о взаимном расположенин звеньев физической модели 5,которая поступает на сумматоры 7, гдесравнивается с сигналами от датчиковположения исполнительного механизмаробота 9. С сумматоров 7 сигналы рассогласования поступают на приводы 8,которые перемещают звенья исполнительного механизма робота, повторяятраектории подобных звеньев фиэическОЙ мОдели 5 При этОм пОстояннОобеспечивается соответствие движениясхвата робота движению базовой точкимодели 5. Применение изобретения позволяет 2 О упростить устройство управления проьыаленным роботом, повысить его помехозащищенность, а также производить управление роботами, отличающимися кинематическими схемами, путем за мены физической модели,устройство для управления промышленным роботом, содержащее последовательно соединенные блок памяти иблок считывания программы и по каждойкоординате последовательно соединенные сумматор, привод, исполнительныймеханизм, датчик положения исполнительного механизма, выход которогоподключен к первому входу сумматора,о т л и ч а ю щ е е с я тем, что, сцелью упрощения и повышения помехозащищенности устройства, оно содержит последовательно соединенные микроприводы, редукторы, физическую модель исполнительного механизма роботаи датчики положения физической модели,выходы которых подключены ко вторымвходам соответствующих сумматоров, авходы микроприводов соединены с соответствующими выходами блока считывания програюая.Источники информации, принятые вовнимание при экспертизе:1. Мясников В.А. и др. Программноеуправление оборудованием, 1974, с.361.2. Акцептованная заявка франции9 2236620, кл, В 259/00,
СмотретьЗаявка
2416965, 14.10.1976
ПРЕДПРИЯТИЕ ПЯ М-5397
САХАРОВ ОЛЕГ ТИМОФЕЕВИЧ, ГУРЕВИЧ СЕРГО МАТВЕЕВИЧ, ВАНТУХ АЛЕКСАНДР ИВАНОВИЧ, ЛУШНИКОВ АЛЕКСЕЙ АЛЕКСАНДРОВИЧ, ШУЛЕНИН ВЛАДИМИР ПАВЛОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: промышленным, роботом
Опубликовано: 15.08.1978
Код ссылки
<a href="https://patents.su/2-619331-ustrojjstvo-dlya-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления промышленным роботом</a>
Устройство для сигнализации о положении механизмов

Номер патента: 711607
Опубликовано: 25.01.1980
Автор: Тинис
МПК: G08B 23/00
Метки: механизмов, положении, сигнализации
...10 датчика 2, тиристор 11,первый резистор 12, второй резистор.3 итретин резистор 14, индикаторный элемент ф15, мультивибратор 16 с выходными тиристорами 17, 18.Устройство работает следующим образом,При подаче питания с источника 1 на 21устройство происходит запуск мультивибратора 15.При крайних положениях переключающего контакта 10 датчика 2 через контакт10 на диоды 8, 9 подают сигнал соответствующей полярности. В первом положении одатчика 2 в линию 13 поступает положительный потенциал, который через разделительдиод 8 и резистор 12 подают на управляющий электрод тиристора 10 одновременнона один вывод индикаторного элемента 15. з 5Тиристор 10, открывшись, подает отрицательный потенциал через резистор 14 на другой вывод индикаторного...
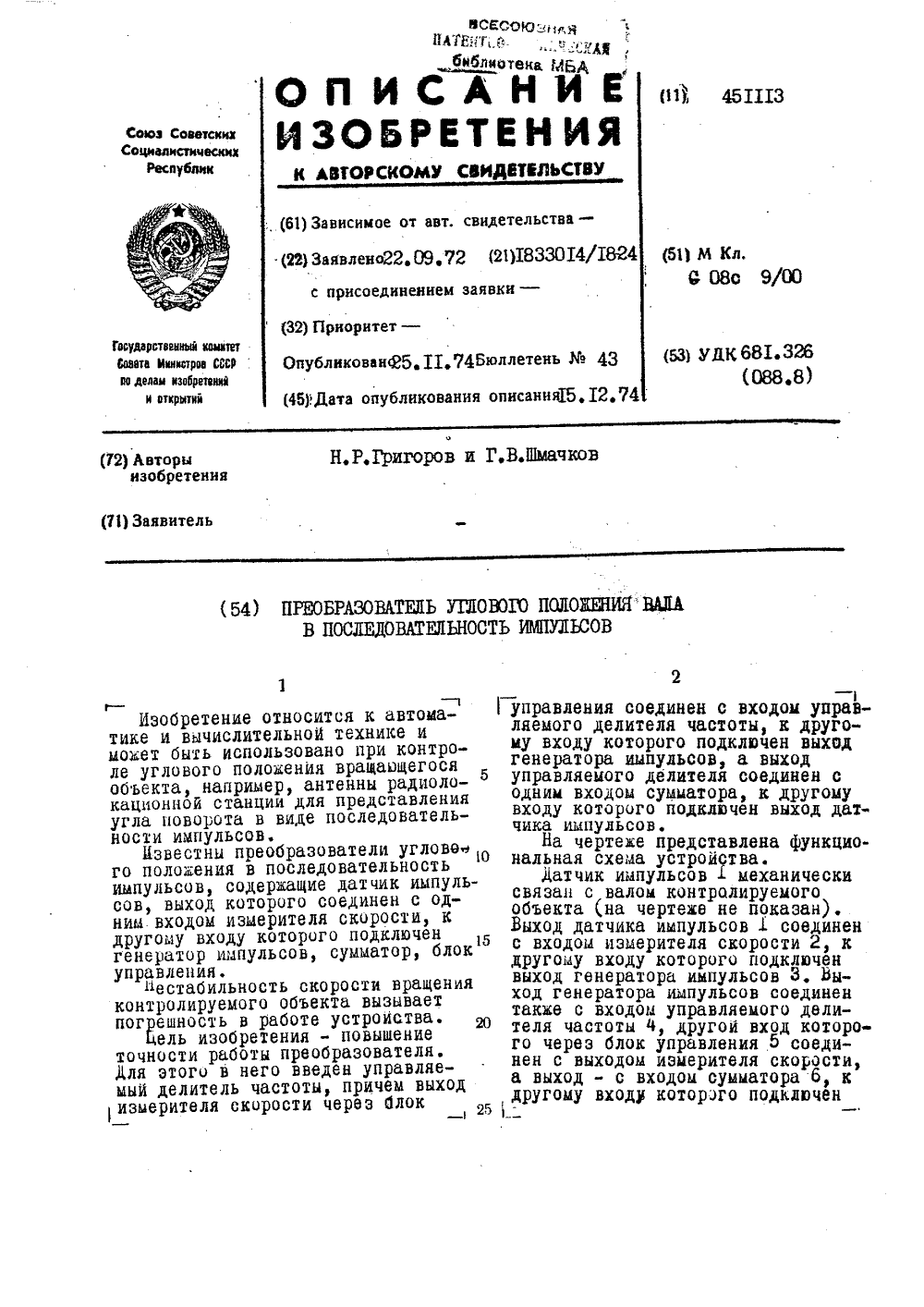
Преобразователь углового положения вала в последовательность импульсов
Номер патента: 451113
Опубликовано: 25.11.1974
МПК: G08C 9/00
Метки: вала, импульсов, положения, последовательность, углового
...скорости 2 и на сумматор б.Временная расстановка между метками с датчика импульсов Т зависит от скорости вращения вала. Измеритель скорости 2 через блок управления 5 устанавливает в управляемом делителе частоты М соответствующее скорости вращения значение коэ 4 фициента деления частоты. Тогда за время между двумя метками с датчика импульсов А на сумматор б проходит определенное число меток с управляемого делителя частоты. ременная расстановка между метками с управляемого делителя частоты М определяется частотой генератора импульсов 3 и значением коэуициента деления частоты.При изменении скорости вращения вала измеритель скорости 2 устанавливает новое значение коэффициента деления частоты,При этом между двумя метками с датчика...
Устройство для измерения положения механизма

Номер патента: 876225
Опубликовано: 30.10.1981
Авторы: Богуславский, Бойко, Нельга, Тихобаев
МПК: B21B 38/10
...возникает необходимость часто изменять направление перемещения), то нажимной механизм для устранения накапливаю- шихся ошибок пришлось бы выводить из зоны рабочих перемещений, т.е. воэвра 1 щать в исходное положение для обнуле 5ния, что отрицательно скажется на производительности,прокатки.Цель, изобретения- увеличение точности измерения путем устраненияошибки от люфтов в механических звеньях,Поставленная цель достигается тем,что устройство допЪлнительно снабжено .преобразователем дополнительного кода,вторым суммирующим счетчиком и сумсматором, причем входы счетчиков связаны через формирователь счетных импульсов с путевым выключателем и блоком выработки сигналов вращения,выход первого счетчика через преобразователь дополнительного кода...
Устройство для последовательного подключения датчиков к измерительной цепи

Номер патента: 613199
Опубликовано: 30.06.1978
Авторы: Кузнецов, Парамонов, Смирнов
МПК: G01D 5/25
Метки: датчиков, измерительной, подключения, последовательного, цепи
...блок-схема устройства.Устройство состоит из многоканальногомеханического коммутатора 1, к неподвижным измерительным контактам (ламелям) которого подсоединены внец 1 нце датчики 2, напряжений, а к неподвижным вспомогательным контактамнаходящимся между измерительными, подсоединен источчцк 3 напряжения, величина которого меньше, чем напряжения, поступающие с датчиков.Выход механического коммутатора соединен с входами усилителя 4 мощности с коэффициентом усиления напряжения, равным 1,Корректор И. Симкина Редактор Н. Суханова Заказ 342/567 Изд.479 Тираж 892 НПО Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж, Раушская наб., д. 4/БПодписное Тип. Харьк. фил. пред. Патент и устройством Б, формирования...
Способ измерения временного положения переодической последовательности радиоимпульсов и устройство для его осуществления

Номер патента: 673944
Опубликовано: 15.07.1979
Авторы: Балов, Горностаев, Никитенко, Химулин, Чистов
МПК: G01S 5/14
Метки: временного, переодической, положения, последовательности, радиоимпульсов
...4 подаются как на фазоизмерительную следящую систему 5 через безынерционный линейный сумматор 12, так и на измеритель 8 интервала Ь 1, состоящий в данном случае из двух предельных ограничителей 9 и 13, вычитаю- щего блока 14, временного ди-криминатора 10 и накопителя 11.На выходе временного дискриминатора 10 будут выделяться прямоугольные видео- импульсы с длительностью, равной интервалу Ь при в = 0;1, +1 и равной длительности строба при 1 гп 11. При формировании двух последовательностей дополнительных радиоимпульсов пороговыи анализатор 45 5 О 55 5рую фазоизмерительную следящую систему15, причем приемник 1 может содержать триполюсовых фильтра 16, 17, 18., Устройство работает следующим образом,Выбранные точки однонаправленной смены...
Предыдущий патент: Устройство для автоматического управления циклом врезного шлифования
Следующий патент: Устройство для ломки проката
Случайный патент: Устройство для расфасовки текучих материалов