Преобразователь углового положения вала в последовательность импульсов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
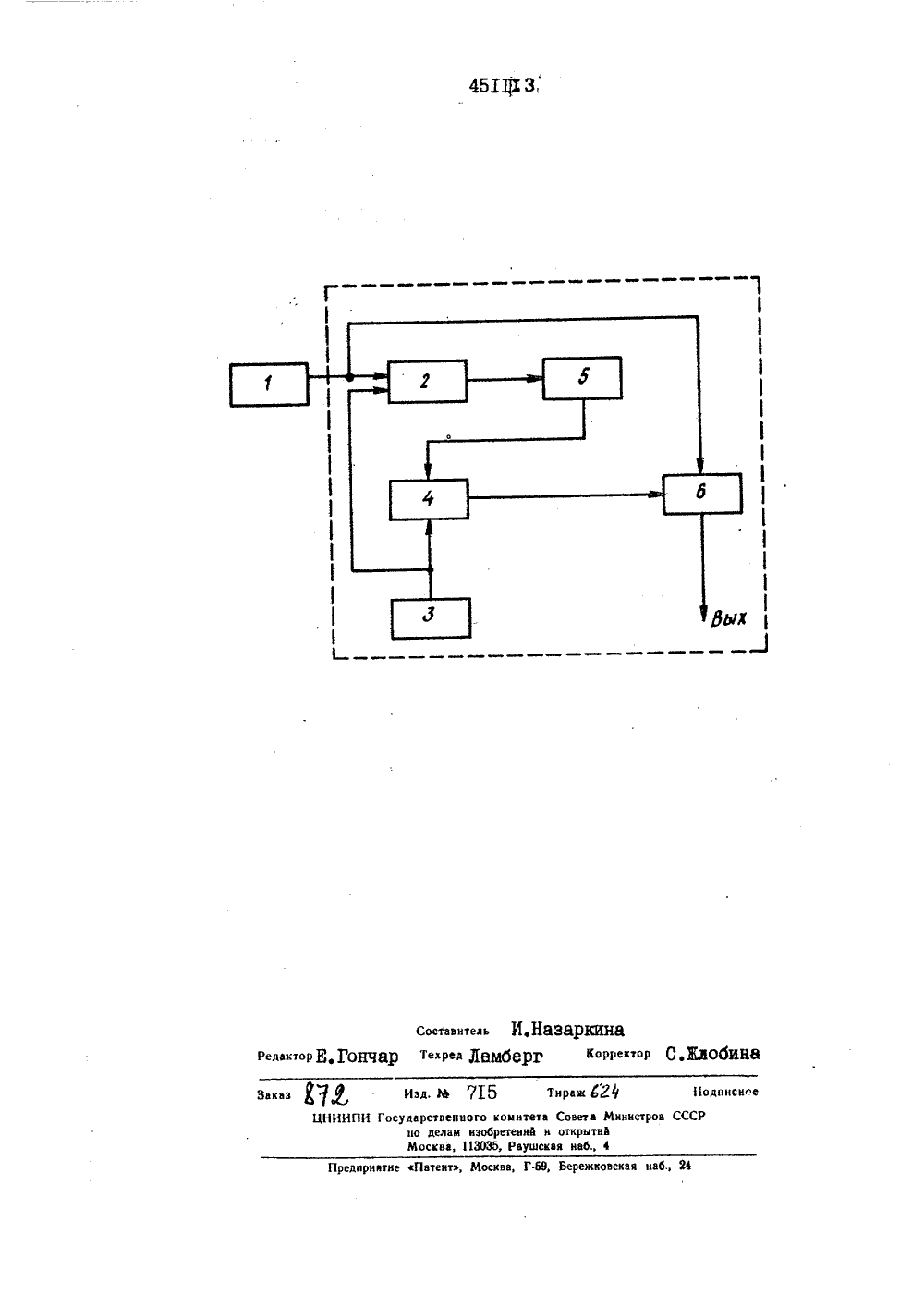
(32) Приоритет Гасударстееееие еаиатетбааета Иеластрее СССРае делам езабретелееи аткрктеаОпубликовант 25.П.74 Бюллетеиь43 (45): Дата опубликования описаиия 3512,(72) Авторы изобретения(71) Заявите 54) ПРЕОБРАЭОМТИ 1 Ь У 120 ЮГО ПМОЕЕНИЯ В ПОСЛЕДОВАТБ 1 ЬНОСТЬ ИМППЪСОВ Изобретение относится к автоматике и вычислительной технике иможет быть использовано при контроле углового положения вращающегосяобъекта, например, антенны радиолокационной станции для представленияугла поворота в виде последовательности импульсов,Известны преобразователи углове ,го положения в последовательностьимпульсов, содержащие датчик импульсов, выход которого соединен с одним входом измерителя скорости, кдругому входу которого подключенгенератор импульсов, сумматор, блокуправления,нестабильность скорости вращенияконтролируемого объекта вызываетпогрешность в работе устроиства.4 ель изобретения - повышениеточности работы преобразователя.для этого в него введен управляемый делитель частоты, причем выходизмерителя скорости через блок 2Гуправления соединен с входом управ ляемого делителя частоты, к другому входу которого подключен выход генератора импульсов, а выход управляемого делителя соединен с одним входом сумматора, к другому входу которого подключен выход датчика импульсов.На чертеже представлена функциональная схема устройства.датчик импульсов 1 механически связан с валом контролируемого объекта (на чертеже не показан), Выход датчика импульсов 1 соединен с входом измерителя скорости 2, к другому входу которого подключен выход генератора импульсов 3. Выход генератора импульсов соединен также с входом управляемого делителя частоты М, другой вход которого через блок управления б соединен с выходом измерителя скорости, а выход - с входом сумматора 6, к другому входу которого подключен3выход датчика импульсов.Ыреобразователь работает следующим образом.Аатчик импульсов Т при вращении вала контролируемого объекта выдает последовательные метки импульсы). исло выданных меток пропорционально углу поворота вала, При этом число меток в течение одного оборота ограничено. Манные метки поступают на измеритель скорости 2 и на сумматор б.Временная расстановка между метками с датчика импульсов Т зависит от скорости вращения вала. Измеритель скорости 2 через блок управления 5 устанавливает в управляемом делителе частоты М соответствующее скорости вращения значение коэ 4 фициента деления частоты. Тогда за время между двумя метками с датчика импульсов А на сумматор б проходит определенное число меток с управляемого делителя частоты. ременная расстановка между метками с управляемого делителя частоты М определяется частотой генератора импульсов 3 и значением коэуициента деления частоты.При изменении скорости вращения вала измеритель скорости 2 устанавливает новое значение коэффициента деления частоты,При этом между двумя метками с датчика импульсов проходит прежнее число меток. однако временное расстояние между метками другое и определяется скоростью вращения вала контролируемого объекта. Блок управления Ь обеспечивает постоянство коэфрициента деления частоты в период между поступлением двух соседних еток с датчика импульсов.Сумматор суммирует последовательности импульсов, снимаемых с датчика импульсови с управляемо 4го делителя частоты М. 1 аким образом, на выходе преобразователя выдается постоянное число угловых меток импульсов), пропорциональных углу поворота. При этом погрешность выдачи угла в значительно меньшей степени зависит от нестабильности вращения вала контролируемого объекта. Стационарная нестабильность вращения может быть скомпенсирована полностью. Что же касается переменной, то компенсация ее ограничивается крутизной характеристики нестабильности вращения вала. При значительной инерционности вала и большом числе меток с датчика импульсовразность временных интервалов между тремя соседними метками с датчика импульсов на порядок меньше временной расстановки импульсов, снимаемых с управляемого делителя частоты ч,ПРЕДМЕТ ИЗОБРЕТЕНЫПреобразователь углового положения вала в последовательностьимпульсов, содержащим датчик импульсов, выход которого соединен а одним входом измерителя скорости, к другому входу которого подключен генератор импульсов, сумматор, блок управления, о т л и ч а ю - щ и й с я тем, что, с целью повышения точности работы преобразователя в него введен управляемый делитель частоты, причем выход из- ,О мерителя скоростй через блок управления соединен с входом управляемо го делителя частоты, к другому вхо ду которого подключен выход генератора импульсов, а выход управля емого делителя частоты соединен с- одниь; входом сумматора, к другомувходу которого подключен выход датчика импульсов.45 ПД 3,Составитель И НИЗЩ)КИНЮРедактоР Е фОНЧВР Тех ред ЛЩф(ВРф Корректор С ЖЛОбИН 6 ЦНИИПИ Государственного комитета Совета Мнннстров СССР по делам изобретений н открытнй Москва, 113035, Раушсквя наб., 4 Предприятие Патент, Москва, Г.б 9, Бережковская наб., 24 Заказ ЦЯ Изд. а 715 тнраж 624 Подписное
СмотретьЗаявка
1833014, 22.09.1972
ПРЕДПРИЯТИЕ ПЯ Г-4421
ГРИГОРОВ НИКОЛАЙ РУБЕНОВИЧ, ШМАЧКОВ ГЕННАДИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G08C 9/00
Метки: вала, импульсов, положения, последовательность, углового
Опубликовано: 25.11.1974
Код ссылки
<a href="https://patents.su/3-451113-preobrazovatel-uglovogo-polozheniya-vala-v-posledovatelnost-impulsov.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь углового положения вала в последовательность импульсов</a>
Датчик для измерения частоты скольжения асинхронного электродвигателя

Номер патента: 1278715
Опубликовано: 23.12.1986
Авторы: Ефимов, Пармас, Сыркин, Черных
МПК: G01P 3/46
Метки: асинхронного, датчик, скольжения, частоты, электродвигателя
...27 подсоединен вторым входом к соединенным между собой выходу девятого сумматора 28 и вторым входам второго множителя 13 и третьего сумматора 9.При этом датчик 30 температуры выполнен в виде термопары.Датчик для измерения частоты скольжения асинхронного электродвигателя работает следующим образом.Измерительные преобразователи 1,5,20 и 21 обеспечивают гальваническую развязку схемы датчика от шин 2, 3 и 6 питания. Сумматор 4 обеспечивает преобразование сигнала с выходов преобразователейи 5 напряжения в сигнал, пропорциональный проекциям вектора напряжения статора электродвигателя 24 на ось абсцисс ортогональной системы координат. Сигнал на выходе второго измерительного преобразователя 5 напря - жения пропорционален проекции вектора...
Датчик скорости и направлениявращения вала

Номер патента: 824058
Опубликовано: 23.04.1981
МПК: G01P 3/48
Метки: вала, датчик, направлениявращения, скорости
...сигнальная обмотка 5Все секции статора представляют собой постоянный магнит, полученный, например, как результат остаточного намагничивания после пропуска тока Через обмотку 5. 20Датчик работает следующим образом,При вращении ротора происходит периодическое изменение магнитного сопротивления в воздушном зазоре между зубцами секций ротора и статора. 25 Наличие воздушного зазора % в секциях статора предотвращает замыкание магнитного потока по кругу секций. Изменение магнитного потока в магнитопроводах секций статора индуцирует в расположенных наних сигнальных обмотках переменные ЭДС, сдвинутые по фазе друг относительно друга на равные углы 2 Х/К. Эти ЭДС поступают на входы формирователей 7, выходные импульсы которых также...
Устройство для контроля датчиков вал-код

Номер патента: 462202
Опубликовано: 28.02.1975
Авторы: Барабанов, Ванькова, Ширшов
МПК: G08C 25/00
...разрешающие сигналы. В первичную обмотку датчика 4 с генератора 2 15 через формирователь 3 полаются импульсы сопределенной частотой. Прн вращении диска во вторичной обмотке датчика наводятся модулированные по амплитуде сигналы. Входные и выходные сигналы датчика поступают 20 в амплитудный селектор, вырабатываощниимпульс по одному выходу в момент достижения выхоленным сигналом датчика гарантированного максимума, а по лругому выходу н момст лостикения выходным сигналом дат чика гарантированного минимума. При нормальной работе латина выходные сигналы селектора чередуются и, проходя через открьпые вентили 6 и 7, посгупают а входы счетчиков 8 и 9 Выходной импульс вензо гиля 6 записывает 1 в счетчик 8 и сбрасыСоставитель И, К. Назаркина...
Устройство для измерения частоты и скорости ее изменения

Номер патента: 1100573
Опубликовано: 30.06.1984
Автор: Кабиков
МПК: G01R 23/00
Метки: изменения, скорости, частоты
...входы кото-,рого соединены с инФормационнымивходами цифрового диФференциатора 7,60 Первый вход сумматора 13 подключен квыходу сумматора 12, а второй входсо сдвигом на один разряд в сторонустарших разрядовк инверсному выходу многоразрядного регистра 965 сдвига, Выход сумматора 13 соединен3 имеет место импульсная последова Отельность с частотой, равной частоте на выходе источника 2, но синхрон 15 25 30 35 мент И блока 3, на первом входе котобО 65 с выходом цифрового дифференциатора 7.Устройство работает следующим об" разом.Блок 3 синхронизации в ответ на каждый импульс с выхода источника 2 вырабатывает свой выходной импульс, синхронный во времени со следующим за этим импульсом с выхода источника 1. Таким образом, на выходе блока...
Умножитель частоты следования импульсов

Номер патента: 1598136
Опубликовано: 07.10.1990
Авторы: Грызов, Миронов, Одинец
МПК: H03B 19/00, H03K 5/156
Метки: импульсов, следования, умножитель, частоты
...на шине 16, не равен единице, то на тактовый вход преобразователя 11 поступают импульсы (Фиг. 3 г) с частотой Г /К и число импульсов И, станет равным И, = 22 Ф.Г,= К А РЬх. С приходом каждого импульса на шину 9 начинается новый цикл заполнения счетчика 12, в результате чего за время, равное одному периоду ТВ, вЬхф нем накапливается число, пропорциональное значению частоты входных им пульсов.Импульсы на выходе делителя 5 и на шине 4 Формируются следующим образом,Рассмотрим случай, когда величина частотной подставки Г , поступающей на ыину 14, равна нулю, а коэффициент 21, поступающий на шину 15, равен единице, Код И, на выходе счетчика 1 равен На выходе делителя 5импульс, если на его так поступит 21 г импульсов (Фиг.3 д), равное...
Предыдущий патент: Устройство для сигнализации о состоянии исполнительного механизма
Следующий патент: Преобразователь угол-код
Случайный патент: Устройство для установки сборных теплоизоляционных скорлуп на трубопровод