Модуль движения робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
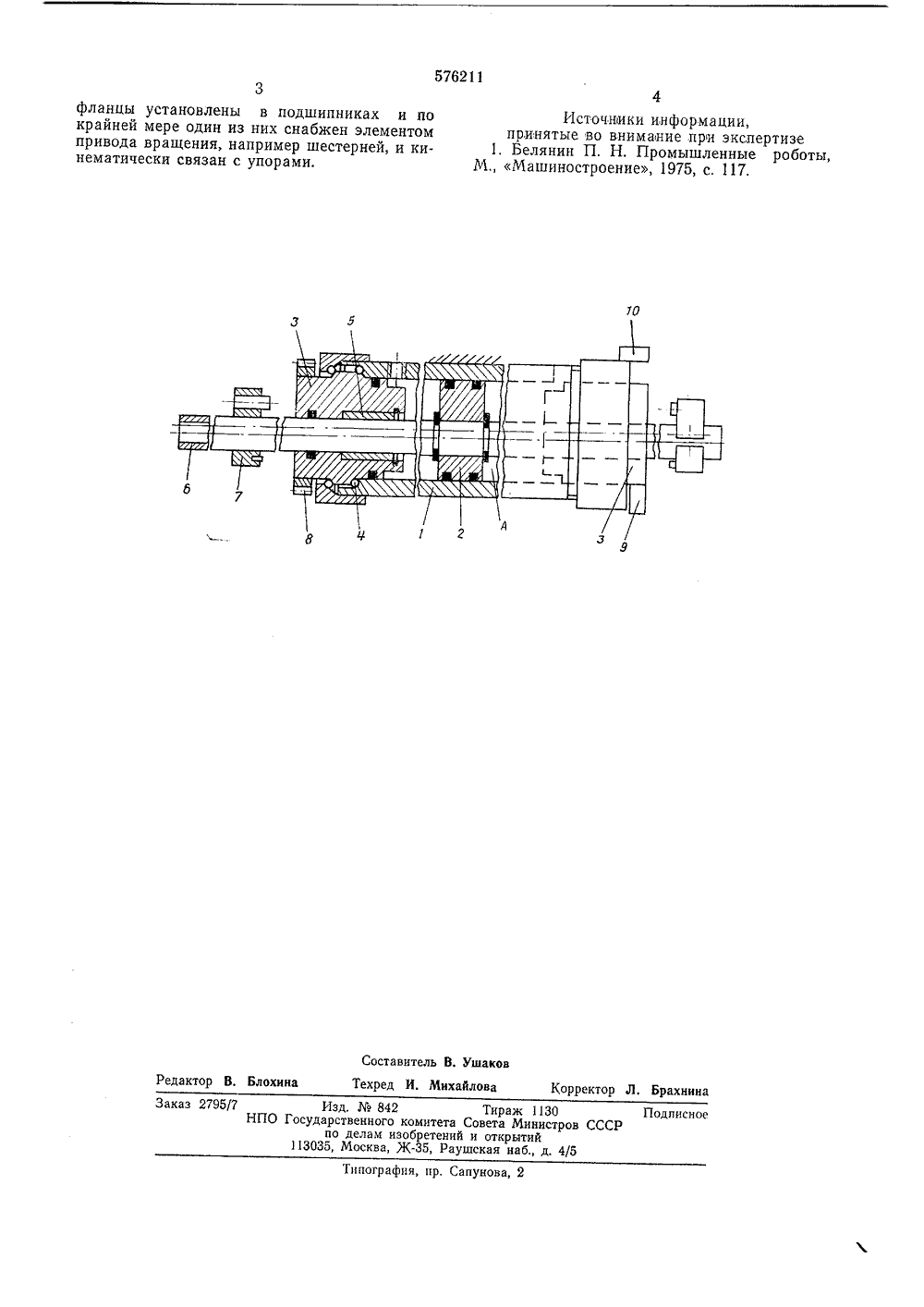
г. т"ЪО П И С А й й Ец 5762 ИИЗОБРЕТЕН ИЯ 1,кт . но г,зн" Ь 1 Союз Советских Социалистических Республик(45) Дата опубликования описания 14.10.77 Ь) М. Кл,з В 25,1 9,00 Государственныи комите Совета Министров СССР по делам изооретенийи открытий 3) 62-229,72(72) Авторы изобретени С. А. Полтаев, М. П. Чайко, В. К. Даниленко и В. С, Ринг Институт технической кибернетики АН Белорусской ССР 1) Заявитель ИЖЕНИЯ РОБОТА 54) МОДУ к промышленны жения руки робота, содр, в корпусе которо- и фланцы, через опос возможностью осеторонний шток, эксый относительно цицев 1.устройства являются возможности,С целью расширения теможностей модуля перемщения ему, кроме поступния, вращательного движемодуле по крайнейснабжен элементомпример шестерней,упорами, причем обподшипниках.На чертеже изображендуль. фланцу 3 с личию эксотносительно на величину, оров 9 и 10. мере приви кипеа фл предлагаемыи мозобретен ормул дра размещены 2 вленные в подорых пропущен жностью осевона поршне 2 иотносительно 3 В корпусе 1 силового цилин поршень 2 и фланцы 3, устано шипниках 4, через опоры 5 кот двусторонний шток 6 с возмо го перемещения, закрепленный эксцентрично расположенный робота, содерж анцамп и двус рого расположе я тем, что, ических воз мо ии си пжениядр с флцах котоющийтехноло Модуль дловой цилпшток, на коры, отлпчрасширения торонннп ны упос цельюжностеи,Изобретение относитроботам.Известен модуль двидержащий пневмоцилиго размещены поршеньры которого пропущенвого перемещения двуцентрично расположенлиндра, поршня и фланНедостатком этогонизкие технологически хнологических возещения путем сообтельного перемещения в предлагаемомодин из фланцев ода вращения, наматически связан с анца установлены в корпуса 1, поршня 2 и фланцев 3. На концах штока 6 находятся жесткие регулируемые упоры 7, Один из фланцев 3 снабжен элементом привода вращения, например шестерней 5 8, и кнематически связан с другим, на котором установлены упоры 9 и 10, ограничивающие поворот.Работа модуля осуществляется следующимобразом. При подаче давления в одну из по лостей силового цилиндра 1 происходит осевое перемещение штока 6 до тех пор, пока один из упоров 7 не упрется во фланец 3. Величина хода регулируется перемещением упоров 7 на штоке 6. Поворот штока 5 осу ществляется с помощью шестерни 8. Вращение шестерни передаетс опорой 5, который благодаря н центриситета повернет шток 6 20 центра вращения шестерни 8 определяемую расположением у576211 Составитель В, Ушаков Редактор В, Блохина Техред И. Михайлова Корректор Л. Брахнина Заказ 2795/7 Изд Мо 842 Тираж 1130 Подписное НПО Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Типография, пр. Сапунова, 2 фланцы установлены в подшипниках и по крайней мере один из них снабжен элементом привода вращения, например шестерней, и кинематически связан с упорами. 4 Источники информации,принятые во внимание прои экспертизе 1. Белянин П. Н. Промышленные роботы,М., Машиностроение, 1975, с. 117.
СмотретьЗаявка
2326165, 19.02.1976
ИНСТИТУТ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ АН БЕЛОРУССКОЙ ССР
ПОЛТАЕВ СЕРГЕЙ АЛЕКСАНДРОВИЧ, ЧАЙКО МИХАИЛ ПРОХОРОВИЧ, ДАНИЛЕНКО ВАСИЛИЙ КУЗЬМИЧ, РИНГ ВИКЕНТИЙ СТАНИСЛАВОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: движения, модуль, робота
Опубликовано: 15.10.1977
Код ссылки
<a href="https://patents.su/2-576211-modul-dvizheniya-robota.html" target="_blank" rel="follow" title="База патентов СССР">Модуль движения робота</a>
Способ правки деталей, имеющих форму тел вращения, например валов, штоков, труб, ходовых винтов токарных станков и т. п.

Номер патента: 103980
Опубликовано: 01.01.1956
Автор: Тэхт
МПК: B21D 3/16
Метки: валов, винтов, вращения, имеющих, например, правки, станков, тел, токарных, труб, форму, ходовых, штоков
...правки основан на принципе циклической пластической деФорма, - ции.Лля осуществления данного способа применен станок, выполненный по схеме машины для испытания материалов на усталость.На чертеже изображена схема станка.Станок состоит пз двух зажииных патронов (1) и (2), редукгора (3), электродвигателя (4), муФты (5) и системы рычаговс грузом Л).Правка производится следу 1 од 1 дм образом.3 сталь (8), подлежащую правь.е,уста 11 авлдва 1 о 1 ь 1 штронах (1) и (2), и затем ей сообщают медленное вращение, которое передастся от электродвигателя (1) через редуктор (3). В процессе вращендя летали ее плавно нагружают посредством системы рычагов (6) и груза 1.7) несколько вьпдо предела текучести материала, С ишгложенной нагрузкой летали задают...
Устройство для ультразвукового контроля изделий, имеющих форму тел вращения

Номер патента: 440599
Опубликовано: 25.08.1974
МПК: G01N 29/04
Метки: вращения, имеющих, тел, ультразвукового, форму
...8, обеспечивающий при помощи зубчатых колес 9 и 10 перемещение кулач ков 7, установленные между кулачками четыре опоры 11, выполненные в виде планок и имеющие возможность поворачиваться в подшипниках 12 от вращающегося диафрагменного пневмоцилиндра 13 посредством зубча тых реек 14 и шестерен 15, жестко закрепленных на осях опор 11, подвижную каретку с юстировочным устройством 16 и искателем 17 (на чертеже показаны условно). 15 Включением привода каретка с юстировочным устройством искателя устанавливается у края иммерсионной ванны 1. При подаче сжатого воздуха в верхнюю полость пневмоцилиндра 13 шток, жестко связанный с рей кой 14, через шестерни 15 поворачивает опоры 11 в вертикальное положение, на опоры укладывается изделие....
Механизм для перемещения фланцев сборочного барабана

Номер патента: 493371
Опубликовано: 30.11.1975
Авторы: Губенков, Симченко, Ходинов, Шилов
МПК: B29H 17/16
Метки: барабана, механизм, перемещения, сборочного, фланцев
...связанный со штоком 12.20 Кольцевой цилиндр 9 снабжен крышкой 13.На втулке 4 смонтирована опора 14, в которой смонтированы подшипники 15. Опора14 связана со штоками 12,Кольцевой цилиндр 9 и опора 14 кинематп 25 чески связаны между собой посредством синхронизатора, выполненного в виде зубчатыхреек 16, между которыми расположсца с возможностью зацепления зубчатая шестерня 17,Одна из зубчатых реек 16 неподвижно закрсп 30 лена на опоре 14, а другая - на корпусе493371 10 Предмет изобретения Фв1;оррсктор Л. Орлова Тскисд Е, ПодуруиЕнна Рс ак,ор В, ЛЕсснко 1 .и, Л. с 17 Т:. раж /40 Полиисио;Ц 11111 ПИ 1 ос 1 ирсЕииии о;,:оит.та Соиста Мииистров СССРс,а .и) )с,си и отк 1)ытиЕ1 З.,З,), эсса, /1,.ао, а иса 5 иао, Еи 4 5с/:Г , :; (15Б С ; ,;ги и...
Портал промышленного робота

Номер патента: 1135637
Опубликовано: 23.01.1985
Авторы: Бабич, Голышков, Савельев, Смирнов, Сташков
МПК: B25J 9/00
Метки: портал, промышленного, робота
...на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 1; на фиг, 7 - разрез Е-Е на фиг. 1; на фиг. Ь - разрез Ж-Ж на фиг. 3; на фиг. 9 - разрез 3-3 на фиг. 4; на фиг. 10 - кинематическая схема связи поперечной балки с каретками продольных.направляющих; на фиг. 11 - вариант установки продольных направляющих на опорах различной высоты; на фиг. 12 - вариант установки направляющих в случае наклона направляющих в разные стороны в вертикальной плоскости; на фиг, 13 - вариант установки направляющих в случае их не- параллельности в горизонтальной плоскости; на фиг. 14 - вариант установки направляющих в случае непараллельности опор в вертикальной плоскости; на фиг. 15 - вариант установки направляющих в случае. наклона направляющих в одну сторону в...
Силовая головка

Номер патента: 1342624
Опубликовано: 07.10.1987
Автор: Демин
МПК: B23B 47/22
...звездочка поворачивается на некоторый угол,определяемый кинематической цепью,постоянно связывающей звездочку 14с приводом главного движения, со 50стоящей из зубчатой пары 22 и 23,шестерен 24-26, червячной пары 27 и28, промежуточной зубчатой передачи29-31, шестерни 32 на приводном валу 9 шпинделя 8,55Ускоренный подвод пиноли 2 совместно со шпинделем 8 продолжаетсядо тех пор, пока механизм ограничения движения це вступит во взаимодей.10 15 20 Ь 30 промежугцу зубчатун передачу 931, шс стс 1 цс 32 ца ирицодцм валу9 шпинделя 8, цоцучающс гс движениечерез ремеццую передачу 10Кицематиеская (.нязь водила 17,сидящего ца валу 16 шес:терни, с цилиндром 7 подач осуществлена черезшестерню 4 и рейку 5 ца участкепоршневого штока 6,Датчики 33 и 34...
Предыдущий патент: Приспособление для демонтажа спирали с цилиндрического стержня
Следующий патент: Исполнительный орган манипулятора
Случайный патент: Устройство для дробления стружки