Способ коррекции систем автоматического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 208072
Автор: Иванченко
Текст
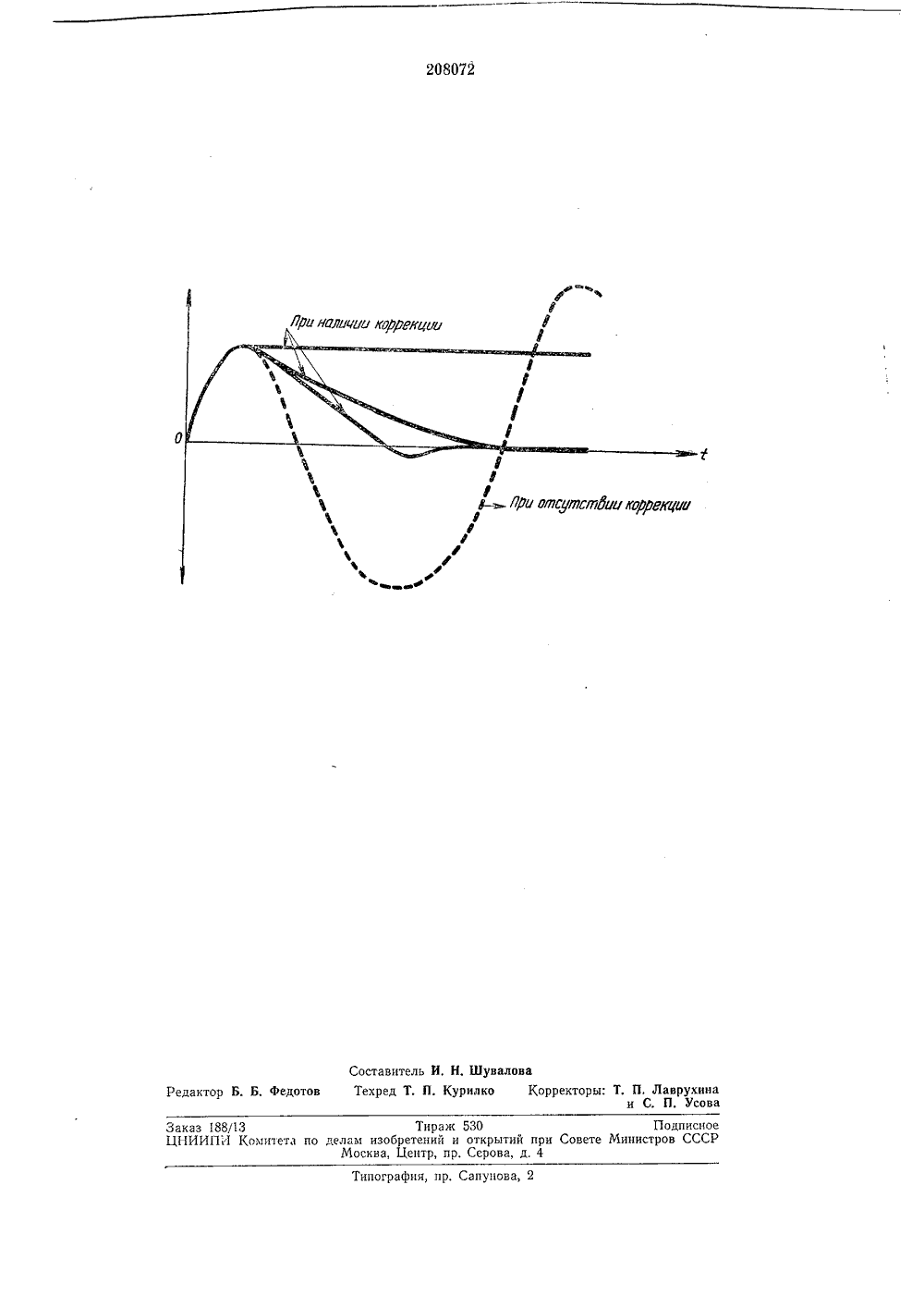
2 ОЗОУ 2 ПИСАНИЕ Союз Советскик Социалистическик РеспубликК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Зависимое от авт. свидетельстваКл. 21 с, 46/50 Заявлено 09.Х 11,1966 ( 1117337/26-24)с присоединением заявкиПриоритетОпубликовано 29.Х 1,1967, Бюллетень3Дата опубликования описания б.11.1968 МПК 6 051 Комитет по делам изобретеиий и открытий при Совете Министров СССРАвторизобретения Г, Е. Иванченко Заявитель Карагандинский научно-исследовательский угольный институт СПОСОБ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯИзвестны способы коррекции систем автоматического управления по быстродействию с фиксацией экстремума производной регулируемого параметра,Предложенный способ позволяет обеспечить стабилизацию системы при наличии внешних возмущений, выводящих ее из устойчивого состояния. Он отличается тем, что в момент (или несколько позже) достижения сигналом рассогласования экстремального значения его фиксируют, запоминают это значение сигнала и подают в цепь управления компенсирующий сигнал по величине, равный сигналу рассогласования, но противоположный ему по направлению.Чтобы получить различные виды переходных процессов в системе, компенсирующий сигнал подают с различной задержкой относительно момента, когда сигнал рассогласования достигает экстремального значения,Переходный процесс при коррекции системы управления приведен на чертеже,Сначала происходит нарастание, а затем уменьшение отклонения регулируемого параметра при отсутствии действия коррекции. В точке экстремума подают компенсирующий сигнал и снижают управляющий сигнал до нуля. Затем система управления движется при отсутствии сигнала управления,Можно получить различные виды переходного процесса. Для этого сигнал подают с 5 различной задержкой относительно моментадостижения сигналом рассогласования экстремального значения. Предмет изобретения10 1. Способ коррекции систем автоматического управления по отклонению регулируемого параметра, отлггчающийся тем, что, с целью обеспечения стабилизации системы при наличии внешних возмущений, выводящих ее из 15 устойчивого состояния, измеряют сигнал рассогласования, фиксируют момент достижения им экстремального з:.ачения, запоминают это значение сигнала и подают в цепь управления компенсирующий сигнал, равный по величине 20 запомненному значению сигнала рассогласования, но с противоположным знаком,2. Способ по п. 1, отличающийся тем, что, сцелью получения различных видов переходных процессов в системе, компенсирующий 25 сигнал подают с различной задержкой относительно момента достижения сигналом рассогласования своего экстремального значения..Б.фе Реда Типография, и р. Сапун аказ 188/13 Тираж 530ЦНИИПИ Коми 1 ета по делам изобретений и открытий при СоветеМосква, Центр, пр, Серова, д. 4 Подписнонистров ССС
СмотретьЗаявка
1117337
Г. Е. Иванченко Карагандинский научно исследовательский угольный институт
МПК / Метки
МПК: G05B 5/00
Опубликовано: 01.01.1968
Код ссылки
<a href="https://patents.su/2-208072-sposob-korrekcii-sistem-avtomaticheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции систем автоматического управления</a>
Устройство для получения сигнала рассогласования двух импульсных последовательностей

Номер патента: 478301
Опубликовано: 25.07.1975
Автор: Боголюбов
МПК: G06F 7/02
Метки: двух, импульсных, последовательностей, рассогласования, сигнала
...элементах 3 и 4 так, что на выходе элемента 4 - 0, а на выходе элемента 3 - "1, т, е. 1" и на выходе элемента 7. Вследствие этого возникает "1" и на выходе устройства, Привод с фазо-импульсным управлением работает таким образом, что сигнал рассогласования "1" вызывает вращение принимающей оси с установившейся скоростью большей, чем максимальная скорость вращения задающей оси, а "О" вызывает установившуюся скоц рость вращения принимающей оси, меньшук чем минимальйая скорость вращения задающей оси. Сигнал "1" на выходе элемента 7 вызывает вращение принимающей оси с повышенной скоростью, вследствие этого через интервал времени, не превышающий время одного оборота принимающей оси, на единичный вход триггера поступает импульс нулевого...
Устройство коррекции временных искажений телевизионного сигнала

Номер патента: 578913
Опубликовано: 30.10.1977
Авторы: Вольфганг, Герхард, Лотар
Метки: временных, искажений, коррекции, сигнала, телевизионного
...частоты, вход578913 Формула изобретения 3847/709сное тент, Проектная, 4 которого через фильтр 5 подключен квыходу фазового детектора 3, выходкоторого подсоединен к входу дополнительного Фильтра б, формирователь 7импульсов, выход которого подключенк второму входу управляемого блоказадерши 1, дополнительнь;Л элементзадержки 8 и амплитудный корректор 9,включенные последовательно между выходом дополнительного фильтра б и входом формирователя 7.Устройство работает следующим образом.На входе устройства имеет место искаженный видеосигнал с импульсами строч-б35ной синхронизацин. Сигнал через управляемый блок задержки 1 проходит на выход устройства. Опорное время задержки управляемого блока задержки 1 задается управляющими тактовыми...
Преобразователь сигнала рассогласования

Номер патента: 187354
Опубликовано: 01.01.1966
МПК: G01J 1/44
Метки: рассогласования, сигнала
...с присоединением заявкиИзвестны спектро- и микрофотометры для автоматической регистрации интенсивности светового потока, работающие при модуляции светового потока с частотой, не равной частоте сети, содержащие преобразователь 5 сигнала рассогласования в сигнал с частотой сети, который идет на управляющую обмотку электродвигателя следящей системы, Для осуществления этого преобразования используют детектирование сигнала рассогласования 10 с последующим преобразованием его в сигнал с частотой сети. Предложенныи преобразователь сигнала рассогласования в сигнал с частотой сети для 15 питания управляющей обмотки реверсивного двигателя преобразует сигнал с частотой модуляции светового пучка непосредственно в сигнал с частотой...
Устройство для получения сигнала рассогласования двух импульсных последовательностей

Номер патента: 607212
Опубликовано: 15.05.1978
Автор: Боголюбов
МПК: G06F 7/02
Метки: двух, импульсных, последовательностей, рассогласования, сигнала
...с инверсного выхода триггера на элементах 10 ц 11. На выходе элемента И- - НЕ 14 вырабатывается импульс, устанавливающий счетчик 2 в нулевое состояние. На выходе элемента И - НЕ 1 О и ца входе элемента 2 И - ИЛИ 5 - О, поэтому импульсы второй последовательности це вызывают счетных импульсов на выходе элемента 2 И - ИЛИ 5 и входе счетчика 2. В этот интервал времени на выходе элемента И - НЕ 4 и на55 входе элемента 2 ИЛИ - НЕ 5 сигнал 1 и импульсы первой последовательности вызь,вают счетные импульсы на выходе элемента 2 ИЛ 1 НЕ 5 и счетцом входе счетчика 3. Эти импульсы сопровождаются установкой реверсивного счетчика 2 на вычитание. На инверсном выходе 60 триггера на элементах 3 и 4, а также на пря. мом выходе триггера на элементах 10 и 11...
Индикатор систем контроля параметров
Номер патента: 284371
Опубликовано: 01.01.1970
Авторы: Долганов, Коломнин, Харламов
МПК: G01D 13/04, G01L 19/08
Метки: индикатор, параметров, систем
...53 и 54. Каждый из профилей представляет собой мягкую ленту с нанесенными на ней двумя различного цвета полями, граница которых является отсчетным указателем индивидуальных значений измеряемых параметров.Конструктивно индикатор расположен в корпусе 55.Работа индикатора заключается в следующем. При изменении положения чувствительного элемента датчика 1 между ним и компенсирующим датчиком 2 создается сигнал рассогласования, который выделяется на обмотке 4 трансформатора 5, С обмотки 6 трансформатора сигнал рассогласования подается на усилитель 7, Усиленный сигнал рассогласования подается на управляющую обмотку двигателя 8, и двигатель передает вращение редуктору 12, который отрабатывает сигнал рассогласования перемещением чувствительного...
Предыдущий патент: Способ автоматического останова механизмовкранов
Следующий патент: 208073
Случайный патент: Состав электродного покрытия