Модель мышцы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1164746
Автор: Романов










Текст
(71) Ордена Трудового Красного Знамени институт физиологии.им. И.П. Павлова(56) Авторское свидетельство СССР В 765825, кл. С 06 С 7/60, 1978.Авторское свидетельство СССР У 1029761, кл, С 06 С 7/60. 1982, (54)(57) МОДЕЛЬ МЫШЦЫ, содержащая сумматор, пороговый элемент, блок моделирования функций электромеханического преобразования мьппечного волокна, выполненный из и последовательно соединенных интегрирующих усилителей, причем в обратную связь каждого из (и)-х интегрирующих усилителей включен соответствующий резистор, выход сумматора через пороговый элемент соединен с первым входом первого интегрирующего усилителя блока моделирования функций электро- механического преобразования мьппечного волокна, выход и-го интегрирующего усилителя которого подключен к выходу первого формирователя параболического напряжения, к входу . первого пропорционально дифференцирующего звена и к одному выводу потенциометра блока моделирования функций электромеханического преобразования мышечного волокна, второй вывод которого подключен к шине нулевого потенциала, средний контакт потенцио.метра соединен с вторым входом пер-. вого интегрирующего усилителя блока .моделирования функций электромехани 80116474 ческого преобразования щппечного волокна, выход первого формирователяпараболического напряжения соединенчерез второе пропорционально. дифференцирующее звено с первым входомсумматора, второй и третий входыкоторого подключены к выходу первогопропорционально дифференцирующегозвена и к потенциометру задания мембранного потенциала соответственно,о т л и ч а ю щ а я с я тем, что,с целью повышения точности моделирования, в него введены интегрирующийусилитель, потенциоиетр заданияускорения силы тяжести, второй формирователь параболического.напряжения, третье и четвертое пропорционально дифференцирующие звенья, блок моделирования параллельного упруговязкого компонента мышцы, блок моделирования последовательного упруговязкого компонента мышцы, блок моделирования упруговязких свойств соединительной и сухожильной тканей,блок моделирования механическихсвойств внешней среды и блок моделирования функции нервно-мьппечного синапса, выполненный в виде последовательно соединенных одновибратора,интегратора и формирователя колоколообразного импульса, выход которогоподключен к четвертому входу сумматора, выход и-го интегрирующего усилителя блока моделирования функцийэлектромеханического преобразованиямьппечного волокна соединен с управля-.ющим входом блока моделирования параллельного упруговязкого компонента мышцы и с информационным входом блокамоделирования последовательного упСилаСоставитель А. Яицкццкая Техред Т.Маточка орректор О.Ти едакто одписно Заказ 4189/47 Т ВНИИПИ Государств по делам изобр 113035, Москва, Ж-"1164746 руговяэкого компонента мышцы, блокмоделирования упруговязких свойствсоединительной и сухожильной тканейвыполнен иэ последовательно соединенных входного сумматора, пропорционально дифференцирующего звена и согласующего усилителя, выход блокамоделирования последовательного упруговязкого компонента мышцы соединен с первым входом .входного сумматора блока моделирования упруговязких свойств соединительной и сухожильной тканей, блок моделированиямеханических свойств внешней средывключает последовательно соединенные делитель напряжения, первый ивторой интеграторы, второй вход первого интегратора соединен со среднимвыводом потенциометра задания ускорения силы тяжести, крайние выводыкоторого подключены соответственно кшине нулевого потенциала и шине питания, выход второго интегратораблока моделирования механическихсвойств внешней среды подключен квходу второго формирователя параболического напряжения и через третьепропорционалЬно дифференцирующеезвено - к пятому входу сумматора,выход согласующего усилителя блокамоделирования упруговязких свойствсоединительной и сухожильной тканейподключен к входу делителя напряжения блока моделирования механическихсвойств внешней среды, выход второго формирователя параболического напряжения через четвертое пропорционально дифференцирующее звено со-.единен с шестым входом сумматора,Изобретение относится к моделированию биологических систем и может использоваться как объект при исследовании нейрональных механизмов управления мьппечным сокращением и для 5 изучения биофизических факторов, менянпцих характеристики сокращения работанпцей мышцы.Цель изобретения - повьппение точности моделирования процессов, про . текающих в мышечном волокне при изс управляющим входом блока моделирования последовательного упруговязкого компонента мышцы и с информационным входом блока-моделирования параллельного упруговязкого компонента мышцы, выход которого черезинвертирующий усилитель подключенк второму входу входного сумматораблока моделирования упруговязкихсвойств соединительной и сухожильной тканей,. каждый блок моделирования параллельного и последователь-ного упруговязкого компонента мышцысодержит четыре масштабирунпцнх резистора, разделительный конденсатор и элемент с односторонней проводимостью, информационный вход каждого блока моделирования параллельного и последовательнбго упруговяэкого,. компонента через последовательно соединенные масштабирующий резистор и разделительный конденсатор подключен к входу элемента с односторонней проводимостью, выход которого соединен с выходом блока и через второй масштабирующий резистор - с шиной нулевого потенциала, управляющий вход каждого блока моделирования параллельного и последовательного упруговязкого компонента через третий масштабирующий резистор подключен к входу элемента с односторонней проводимостью, один вывод четвертого масштабирующего резистора соединен с информационным входом блока, другой вывод четвертого масштабирующего резистора подключен к выходу элемента с односторонней проводимостью. менении длины мышцы, повьппение точности воспроизведения нелинейной зависимости преобразования активного и пассивного напряжений в зависимости от длины мышцы и приближения ее характеристик к характеристикам сокращения реальной мышцы во всем диапазоне длин,На фнг, 1 изображена схема модели; иа фиг. 2 - графики формирования активной А силы в зависимости от длинымьппцы, пассивной Р силы и уровня возбудимости; на фиг. 3 - графики развития активной силы при разных длинах мьппцы и при разных частотах стимуляции; на фиг. 4 - воспроизве дение в модели сокращения сердечной мышцы (изменение мембранного потенциала, длина мьппцы, сила сокращения, раздражающий стимул, отметка времени 1 с). 0Модель содержит блок 1 моделирования функции нервно-мьппечного и сигнала, блок 2 моделирования электровоэбудимых свойств мышечных мембран, состоящий из сумматора 3 и порогово го элемента 4, блок 5 моделирования функции электромеханического преобразования, блок 6 моделирования изменения уровня возбудимости в зависимости от активной силы и скорости ее изменения, блок 7 моделирования изменения уровня возбудимости в зависимости от длины мьппцы и скорости изменения ее длины, потенциометр 8 задания исходного значения мембран 25 ного потенциала, блоки 9 и 10 моделирования упруговязких свойств соответственно последовательного и параллельного компонентов мьппцы с информационными входами 11 и 12 и управляющими входами 13 и 14 соответственно, блок 15 моделирования упруговязких свойств соединительной и сухожильной тканей с выходом 16 "Сила мышцы" модели, блок 17 моделирова ния механических свойств внешней среды с выходом 18 "Длина мьппцы" модели, инвертирующий усилитель 19, Блок 1 состоит из одновибратора 20, ийтегратора 21 и формирователя 22 40 колоколообразного импульса, Блок 5 содержит интегрирующие усилители 23 и потенциометр 24. Блоки 6 и 7 содержат Формирователи 25 параболического напряжения и по два пропор ционально дифференцирующих звена 26, Блок 15 содержит входной сумматор 27, пропорционально дифференцирующее звено 28 и согласующий усилитель 29, Блок 17 состоит из делите ля 30 напряжения, первого интегратора 31 с потенциомеуром 32 задания, ускорения силы тяжести и второго интегратора 33, Блоки 1 и 7 содержат входы и выходы 33-36. Блоки 10 и 9 со- . 5 держат первый, второй, третий и четвертый масштабирующие резисторы 37-40, эле. мент 41 с .односторонней, проводимостью и разделительный конденсатор42, Кроме того, каждый блок 26 содержит разделительный конденсатор43 и резисторы 44; каждьп блок 25содержит усилитель 45, вариатор 46,резисторы 47. Одновибратор 20 содержит входной конденсатор 48, усилитель 49, конденсатор 50 обратнойсвязи и резисторы 51; интегратор21 содержит накапливающий конденсатор 52 и резисторы 53; формирователь22 содержит входной диод 54, усилитель.55, конденсатор 56 накопительный, разрядный диод 57 и резисторы 58;сумматор 3 содержит входные резисторы 59, резистор 60 обратной связии усилитель 61; пороговый элементсостоит из диода 62 и резистора 63;интегратора 23 блока 5 содержатвходные резисторы 64, интегрирующиеконденсаторы 65, резисторы 66 обратной связи и усилители 67; инвертирующий усилитель 19 содержит усилитель 68, входной резистор 69 и резистор 70 обратной связи; входной сумма.тор 27 блока 15 содержит входные резисторы 71, усилитель 72 и резистор73 обратной связи; звено 28 блока 15содержит входные резисторы 74, конденсатор 75, диод 76 и выходной резистор 7; согласующий усилитель 29блока 15 содержит операционный усилитель 78, входной резистор 79 и ре-.зистор 80 обратной связи; делитель30 блока 17 содержит усилитель 81,входные резисторы 82, резистор 83 обратной связи и ключи 84; интеграторы33 и 31 блока 17 содержат усилители85, накапливающие конденсаторы 86 ивходные резисторы 87,Модель работает следующим образом.Модель позволяет исследовать .работу мышцы в нескольких режимах, соответствующих активному и пассивномусостоянию мьппцы,1, В исходном состоянии, когдамышца пассивна, т,е, на входе 34отсутствует входной импульсный поток,на выходах блоков 1, 2, 5, 6 и 9 напряжение равно нулю. Работает контур,включаюций блоки 9, 10, 15 и 17.В этом случае напряжение, соответствующее длине мышцы, поступает на входблока 7, на выходе 35 которого формируется сигнал, который, пройдя блоки10, 19 и 15, изменяется на выходе 16модели как кривая Р пассивного развития силы, зависимость которой пред 1164746ставлена на фиг. 2. Если изменять .длину мьппцы с различными скоростями,то пропорционально дифференцирующиезвенья к постоянной составляющей добавляют напряжение, пропорциональноескорости изменения длины мьппцы. Реальное дифференцирующее звено имеетстандартную передаточную функцию Тр1 О1+тр 1где ТКфС - постоянная дифференцирования.Звено с пропорциональной составля. 15 ющей имеет передаточную функцию и (г) -+= Ж1+Т1Р 1+Т2 О 25 рщ К и0 Кив Ке Можно записать, что выходное напряжение 17 , равно, БеазаЭХ,Согласно закону Ньютона фиэичес 55 кие величины: сила Г 1 масса ш и ускорение а, связаны следующей зависимостью: где Т, Т (1+ К),т.е. кроме переменной составляющей,отражающей скорость изменения длины,сигнал на выходе блоков 9, 10 и 19и 15 будет также пропорционален идлине мышцы,11. Если длина мышцы не Фиксируется, т.е. принудительно не задается напряжение, соответствующее Определенной длине мьппцы, то в модели восЗОпроизводится динамический режим рабо 1 ты пассивной мьппцы, В этом случае переменной величиной является масса грузов, которые может удерживать пассивная мьшпКа 1 растягиваясь под действием этих грузов. В модели массы грузовзадаются в блоке 17 моделирования механических свойств внешней среды делителем 30, в котором с целью упрощения принципиальной схемы масса моделируется набором резисторов на входе операционного усилителя. Дели. тель 30 осуществляет операцию деления.исходя из следующих соображенщ. Коэффициентусиления Операционного 45усилителя выражается формулой ЕР =шфа или а = - .шСопоставляя это выражение с зави; симостью напряжения 0 в,от 0 проводим следующую аналогию:Цвак= а 1 Ко "в Р Квк = шт,е, при постоянстве сопротивления КПд 0 вх интерпретируется как сила Р 1 воздействующая на вход блока 17 и развиваемая мышечным волокном, Квх является массой грузов, которую должна поднимать мьппца 1 причем чем больше входное сопротивление, тем больше масса грузов, а входное напряжение 11пропорционально ускорению, которое сообщает мьппца при взаимодействии с грузом, Далее ускорение, сообщаемое мьппцей определенной массе груза сопоставляется с величиной напряжения, устанавливаемого на потенциометре 32, соответствующего ускорению силы тяжести (например, земной или любой другой, включая случай невесомости). В результате интегрирования в соответствии с законами физики напряжение на выходе интегратора интерпретируется как скорость, сообщаемая грузу, Дальнейшее интегрирование скорости дает физическую величину перемещения, которая в нашем случае соо-ветствует длине мьппцы, Таким образом, в замкнутой цепи блоков 9, 1 О, 19, 15 и 17 поддерживается динамическое равновесие, в котором пассивная Р сила уравновещивает груз при определенной длине мьппцы.Длина мьппцы 1.(С) 1 Ч(С)дС 1 скорость укорочения или растяжения Ч(С) (К - а(Сс.С, где е - ускоР(С) рение силы тяжести; а(С)ШРавновесие выполняется при условии равенства нулю разности д-а(С).Ясли масса ш увеличивается, уменьшается ускорение а(С) и .возникшаяая разность в подинтегральном выражении скорости в соответствии с формулами вызывает удлинение мышцы, Удлинение мьппцы вызывает увеличение пассивной силы Р и увеличение ускорения а(С) до прежней величины, когда вновь система приходит в равновесие, но уже при большей длине мышцы, Уменьшение массы груза приветствующих физиологических экспериментах,В активном состоянии так же моделируются условия работы мьппцы, как и при пассивной мьппце, которые задаются изменением параметров в блоке моделирования механических свойств внешней среды, В этом случае результирующая сила, развиваемая мьппечным волокном и направленная на его укорочение, складывается в виде суммы активной А и пассивной Р сил, т.е. Е=А+ Р Приходящий по входу 34 импульсдифференцируется и формируется наодновибраторе 20 в импульс постоянной длительности и амплитуды, параметры которого не зависят от параметров входного сигнала. Сформированный одновибратором импульс интегрируется на интеграторе 21, а превышающая пороговое значение частьсглаженного интегратором импульсапоступает на формирователь 22, навыходе которого образуется, импульсколоколообразной формы, поступающий.на вход блока 2 моделирования электровозбудимых свойств мьппечных мембран. Таким образом преобразованиев блоке моделирования функции нервно-мьппечного синапса соответствуетпроцессам электрохимического преобразования и задержки в синапсе нраспространению медиаторов по.мембранному аппарату мьппечного волокна.Сформированньп колоколообразный импульс поступает в блок 2, где еговеличина суммируется с сигналами,поступающими по другим входам с уче-том предварительно установленногоначального значения мембранногопотенциала на потенциометре 8. Значение импульса, превьппающее пороговое значение, воздействует на блок 5.Таким образом эффективное значениеимпульса, приводящее к развитию активного сокращения, зависит от напряжений на выходах блоков 6 и 7моделирования изменения уровня возбудимости в зависимости соответственно от активной силы и скорости ее изменения и от длины мьппцы и скорости изменения ее длины.Для блока б зависимость изменения уровня возбудимости выражается фор- мулойЬКИ 4 (Р) А К 2 Иг (Р)А.,7 1164746водит к увеличению ускорения а(й),которое вызывает укорочение мьшцыи уменьшение пассивной Р силы, Вновьнаступает равновесие при новой длине мьппцы. 5ЕЕЕ. Когда поступает импульсныйсигнал на вход 34, на выходах блоков 1, 2, 5, 6 и 9 появляются напряжения, отражающие активное состояниемышцы. В этом случае в модели замы Окаются новые контуры регулирования,способствующие формированию характеристик сокращения, присущих реальной мьппце, во всем диапазоне длинОдин из контуров, охватывающих бло- . 15ки 4, 5 и 6, реализован в прототипеи способствует формированию нелинейной характеристики развития активнойсилы от частоты раздражающих импульсов. Контур, включающий блоки 5, 9, 2015, 17 и 7 и вновь блок 2 через связи 35 и 36, обеспечивает формирование йелинейной зависимости равзитияактивной А силы от длины мышцы, Кроме того, в модели реализованы контуры управления, изменяющие соотношения упруговязких свойств последовательного упруговязкого компонентамьппцы в зависимости от длины мышцы -управление по входу 19 блока 9, и ЗОсоотношение упруговязких свойствпараллельного упруговязкого компонента мышцы - управление по входу 14на блок 10, В этом случае напряжения, поступающие на входы 19 и 1435блоков 19 и 10 моделирования свойствпоследовательного и параллельногоупруговяэких компонентов мышцы, запирают диоды и препятствуют прохож. дению переменной составляющей про О:порционально дифференцирующих звеньев, причем идет постоянное сравне ние значения переменной составляющейи запирающего напряжения,Превышение запирающего диоды упй равляющего напряжения над переменнойсоставляющей делает мышцу более упругой. Если переменная составляющаяпропорционально дифференцирующегозвена больше запирающего напряжения, 50то в модели проявляются вязкие свойства мьппечного волокна тем большие,чем больше превышает переменная составляющая уровень управляющего напряжения, Если управляющее напряжение равно нулю, то в модели воспроизводятся вязкие свойства, прйсущиереальной мышце и выявляемые в соот 1164746а для блока 7 ЬО, - К, И,(Р)Ь - КИ(Р) Ь,где У (Р) - передаточные функции пропорционально дифференцирующих звеньев, рассмотренные вьппе,Существенным для получения характеристик преобразования импульсногосигнала в результирующую силу Р взависимости как от активной А силы,так и от длины Ь мышцы, является то,что напряжения, поступающие с выходовблоков 6 и 7, суммируются в блоке 8с разными коэффициентами, которыеи определяют характерную для конкретных мьппц зависимость развития силы.Реализованные в модели мышцы зависимости развития активной А силыот длины Ь мьппцы схематично представлены на фиг, 2, где нормированные 20величины длины- ось абсцисс, напряжения - ось ординат,Нормированная длина, равная 1,получается иэ условия, когда мьппцурастягивают до такой длины, при которой пассивная сила Р достигает вели.чины, равной максимальной активнойссиле, принимаемой также за единицу,развиваемой данной мышцей. Электровозбудимость мьппцы возрастает линейно с длиной мьппцы и уменьшается помере возрастания пассивной Р силы.Блок 7 моделирования изменения уровня возбудимости от длины мьппцы обеспечивает путем изменения коэффициен- З 5тов в передаточных Функциях пропор, ционально дифференцирующих звеньеви их суммирования в блоке 2 возможность размещения кривой активной Асилы в различных участках на нормированной длине, что определяет физиологический диапазон работы мышц исоотношение их упругих и вязкихсвойств, Таким образом, в данной модели, не меняя структурно-Функциональных отношений и блоков, воспроизводятся характеристики сокращениямедленных тонических мьнпц, напримеринтрафузальных волокон, быстрых имедленных физических мышц скелетной 50мускулатуры. Более медленные мышцырасполагаются левее на нормированной длине. Изменение исходного уровня мембранного потенциала (штрихоггая линия на фиг. 2).позволяет также уизменять эффективность возбуждения С,более точно воспроизводя зависимостьодиночных и тетанических сокращений,приближая их характеристики к характеристикам сокращения реальных мьппц,. Блоки 9, 10 и 15 моделирования упруговязких свойств различных образований мьппцы позволяют воспроизвести особенности развития силы при разных длинах мышцы, которые видны на осциллограммах (фиг. 3), Мышцы, характеристики которых располагаются слева, обладают более вязкими свойствами.Ряд мышечных волокон обладает автоматией сокращения, т.е. способностью периодически сокращаться и расслабляться в отсутствии внешних раздражителей, Такой автоматией обладают мышечные волокна сердца, Представленная модель позволяет промоделировать работу сердечной мышцы,Уменьшение порога возбуждения устанавливаемого на потенциомере 8, приводит к самовозбужцению и периодическим укорочениям и растяжениям, т.е. к появлению соответствунпцих напряжений на выходах блоков 17 и 15,характер которых и частота соответствуют сокращению сердечной мьпацы,Осциллограммы, воспроизводящие характеристики сердечных сокращений на модели, приведены на фиг. 4.Таким образом, с помощью введенных блоков с соответствующими характеристиками преобразования входных сигналов и их структурных связей промоделировано свойство мышечных волокон изменять характеристики электровозбудимости мембран в зависимости от силы сокращения и длины мьппцы. Это позволило на одной структурно-функциональной модели с помощью изменения коэффициентов передачи между отдельными блоками воспроизвести характеристики сокращения различных типов мьппц в изометрическом, иэотоническом или смешанных режимах. Расширение функциональных свойств модели обусловлено тем что в предложенной структурно-функциональной модели мьппцы учтены предполагаемая роль мембранного аппарата в развитии активной силы и изменение электро- возбудимости мышечных мембран в зави - симости,от длины мышцы, которые в известных моделях не рассматривались. Кроме того, параллельный и последовательный упруговязкие компоненты мышцы являются составной частьюмембранного аппарата сократимых .структур и их характеристики вязкости изменяются по-разному у активной и пассивной мышцы: уменьшаются, если растягивается активная мышца. С другой стороны, вязкие свойства укороченной активной мыш- цы исчезают, если активную мьппцу растягивают, Эти свойства являются вновь введенными в модель и ранее при моделивании свойств мьппцы не учитывались. Блок моделирования -функции нервно-иышечного синапса и передачи возбулдения к мышечным мембранам обеспечивает присущую реальным мышцам задержку в развитии силы после прихода возбукдающего иипульса. Введение новых блоков обеспечивает расширение числа параметров, по которым подстраиваются выходные характеристики модели, а следовательно, увейичивается точностьмоделирования. Кроме того, введенные параметры могут быть со-. поставлены с конкретныии биологическими параметрами и структурными образованияж мьппц, что наделяет модель прогностическиии свойствами, необходииыии в научном исследовании. Использование типовых звеньев впередаточных характеристиках делаетмодель мьппцы легко воспроизводимой,а использование современных операционных усилителей для реализацииэтих звеньев - малогабаритной, Кроме легкости настройки модели для реализации характеристик преобразования частоты следования входных им- О пульсов в силу сокращения или изменение длины, присущего различнымтипам мышц, данные модели мошноиспользовать в большом количестве водной установке при исследовании 15 взаимодействия различных типов мьппечных волокон или мышечнЫх групп прикоординированном управлении двигательной активностью. Модель мышцыиохет использоваться при проверке 20 гипотез по биохимическим механизмам,влияющим на сократииые структуры мышечных волокон. Параиетры модели выбираются таким д образом, что модель мьппцы работаетв реальном масштабе времени, позволяя непосредственно сравнивать ре-.сзультаты модельных и физиологических1 экспериментов.
СмотретьЗаявка
3562220, 09.03.1983
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ФИЗИОЛОГИИ ИМ. И. П. ПАВЛОВА
РОМАНОВ СЕРГЕЙ ПЕТРОВИЧ
МПК / Метки
МПК: G06G 7/60
Опубликовано: 30.06.1985
Код ссылки
<a href="https://patents.su/10-1164746-model-myshcy.html" target="_blank" rel="follow" title="База патентов СССР">Модель мышцы</a>
Устройство для диагностического контроля решающих блоков аналоговой вычислительной модели

Номер патента: 809986
Опубликовано: 30.01.1983
Автор: Каджардузов
МПК: G06G 7/02
Метки: аналоговой, блоков, вычислительной, диагностического, модели, решающих
...7 сравниваются с их эталонными значениями.Устройство работает следующим об" разом, 30 Для осуществления диа гностического контроля решающих блоков аналоговой вычислительной модели 9 в цифровой блок 1 управления и обработки35 вводится информация, необходимая для проведения диагностического контроля: перечень диагностических режимов, перечень контролируемых решающих блоков, т.е. перечень контрольных сигналов Н, эталонные значения кривых сигналов Н 0 и Хэ(С), допуски дН и О Х на каждый контрольный сигнал;частоту выдачи эталонных кривых Н (1) и Х (й), амплитуду и частоту - гармонического сигнала 0 (как1Мправило частота сигнала находится в диапазоне 0,05-0,2 Гц). Сигнал О =0 = Аыпй 1 поступает из цифрового блокауправления и обработки через...
Стенд для моделирования горного давления при упрочнении модели горных пород анкером

Номер патента: 1714127
Опубликовано: 23.02.1992
Авторы: Логашкин, Попов-Толмачев
МПК: E21C 39/00
Метки: анкером, горного, горных, давления, модели, моделирования, пород, стенд, упрочнении
...36 и 37 для переключения напорных линий на слив и манометрами 38 и 39. Каждый блок 27 и 28 стабилизации нагрукения выполнен в виде грузорычажной системы 40. с дополнительным гидроцилиндром 41, поршневая полость 42 которого скоммутирована посредством линии 43(44) с напор(2) 50 5ной линией 23(24); Рычаг 45 грузорычажной системы 40 с однойстороны соединен с неподвижной опорой 46, а с другой - с подвижным грузом 47 и штоком 48 дополнительного гидроцилиндра 41. В плоскости 5 качания рычага 45 с двух его сторон установлены конечные выключатели нижний 49 для включения и верхний 50 для выключения соответствующего автономного регулируемого насоса. Рычаг 45 снабжен шкалой 51; 10 проградуированной таким образом, чтобы положение груза 47...
Протез предплечья с электрическим сервоприводом, управляемый биотоками мышц, с устройством для ощущения силы схвата

Номер патента: 120300
Опубликовано: 01.01.1959
Авторы: Кобринский, Полян, Попов, Славуцкий, Сысин, Якобсон
МПК: A61F 2/56
Метки: биотоками, мышц, ощущения, предплечья, протез, сервоприводом, силы, схвата, управляемый, устройством, электрическим
...на ктродвигателя 4 в вь нения полчпроводнико ходи ом блок . Питание уси Я, А, Е. Кобринскии, Б, П, Е. П. Полян,Я, Л, Славуцкий и А, Я,РЕДПЛЕЧЬЯ С ЭЛЕКТРИЧЕСКИМ СЕРВОПРИВОДЛЯЕМЫЙ БИОТОКАМИ МЫШЦ, С УСТРОЙСТВОМДЛЯ ОЩУЩЕНИЯ СИЛЫ СХВАТА,"о 12 ОЗОО литсля е 1 апряже 1 ия 6 и элект 170 дВНГател 5 4 Осу 1 цестВляется кадмиеВО- НРКе 7 евы Или сереб 1 зяпо-цинковыи анкуу;5 Торами 8,С целью о 1 цущения силы схвата предмета применен вибратор 9 типа костпоГО телефона слухоВых аппаратоВ, сиГналы на которьей, пропорц 1 опальные силе сжатия кисти, поступают из электрической цепи двигателя.РасиОлойкенРе ОтВОд 5 ших электродов .10 на коже культи над мышцами сГибателямР 1 и разГибателями пальцеВ дает ВОзмОжнОсть упраВлеИя схватом и раскрытием...
Устройство для моделирования потоков в узле сетевой модели

Номер патента: 1401473
Опубликовано: 07.06.1988
МПК: G06F 15/173
Метки: модели, моделирования, потоков, сетевой, узле
...с законом распределения, соответствующим законупоступления заявок по данной ветви. ключен к выхолу второго латника случайных чисел, выходы элементов Ипервой группы являются выходами элементов выходного потока устройства,выходы элементов И второй группыявляются выходами веса элементоввыходного потока устройства. 2Временную задержку в элементе 16 устанавливают равной минимально возможному интервалу Т времени между двумя поступающими друг за другом заявками. Датчик 17 настраивают на выдачу случайного, с заданным законом распределения, числа элементов в заявке при каждом поступлении импульса на вход датчика. В счетчики 19 и 20 заносят количества импульсов МК и НК, равные соответственно минимально и максимально возможному количеству...
Стенд для моделирования горного давления при упрочнении модели горных пород скрепляющим составом
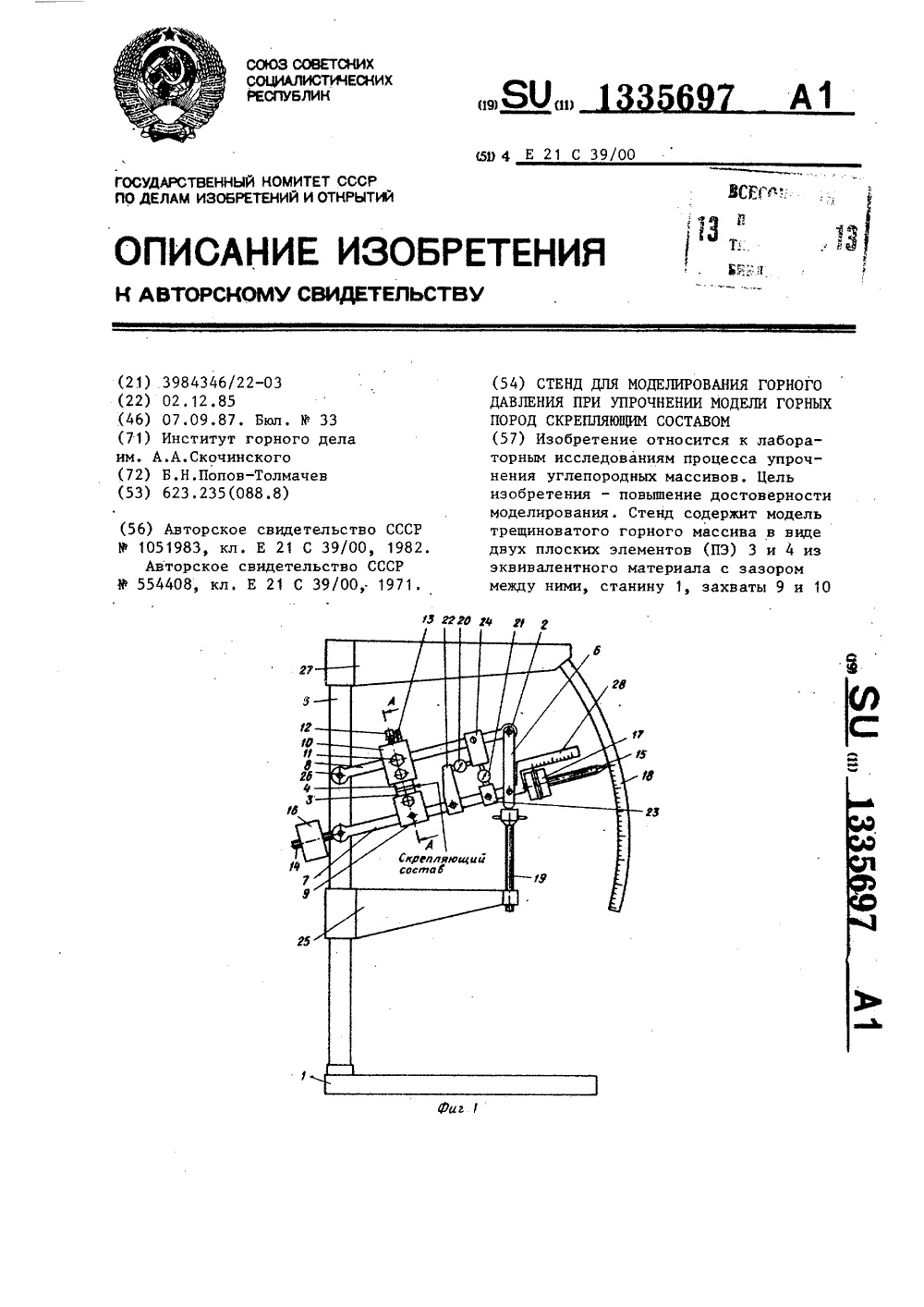
Номер патента: 1335697
Опубликовано: 07.09.1987
Автор: Попов-Толмачев
МПК: E21C 39/00
Метки: горного, горных, давления, модели, моделирования, пород, скрепляющим, составом, стенд, упрочнении
...образом.Для моделирования горного давления в виде совместно действующих сдвига и растяжения конец балансира 7 откло 5 няют вверх от нуля шкалы 18. Д 1.я моделирования горного давления в виде сдвига с сжатием конец балансира 7 отклоняют вниз от нуля шкалы 18. Степень отклонения балансира 7 задается 1 О из условия соотношения деформаций сдвига и растяжения (сжатия) . Четы-рыхзвенник должен быть уравновешен грузом 16, при этом груз 17 должен находиться в положении "0" шкалы 28, Отклонение балансира 7 фиксируют винтовым упором 19, подводя его под коромысло 6.Для сборки модели трещиноватого массива горных пород выводят из ба-.О лансира 8 и стойки 5 палец 26, а затем освободившийся конец балансира 8 поднимаютПлоские элементы 3 и 4 из...
Предыдущий патент: Устройство для воспроизведения функций
Следующий патент: Устройство для решения краевых задач
Случайный патент: Шуп-делитель высокого напряжения постоянного тока