Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 455322
Авторы: Ерош, Марьяновский, Шецен

Текст
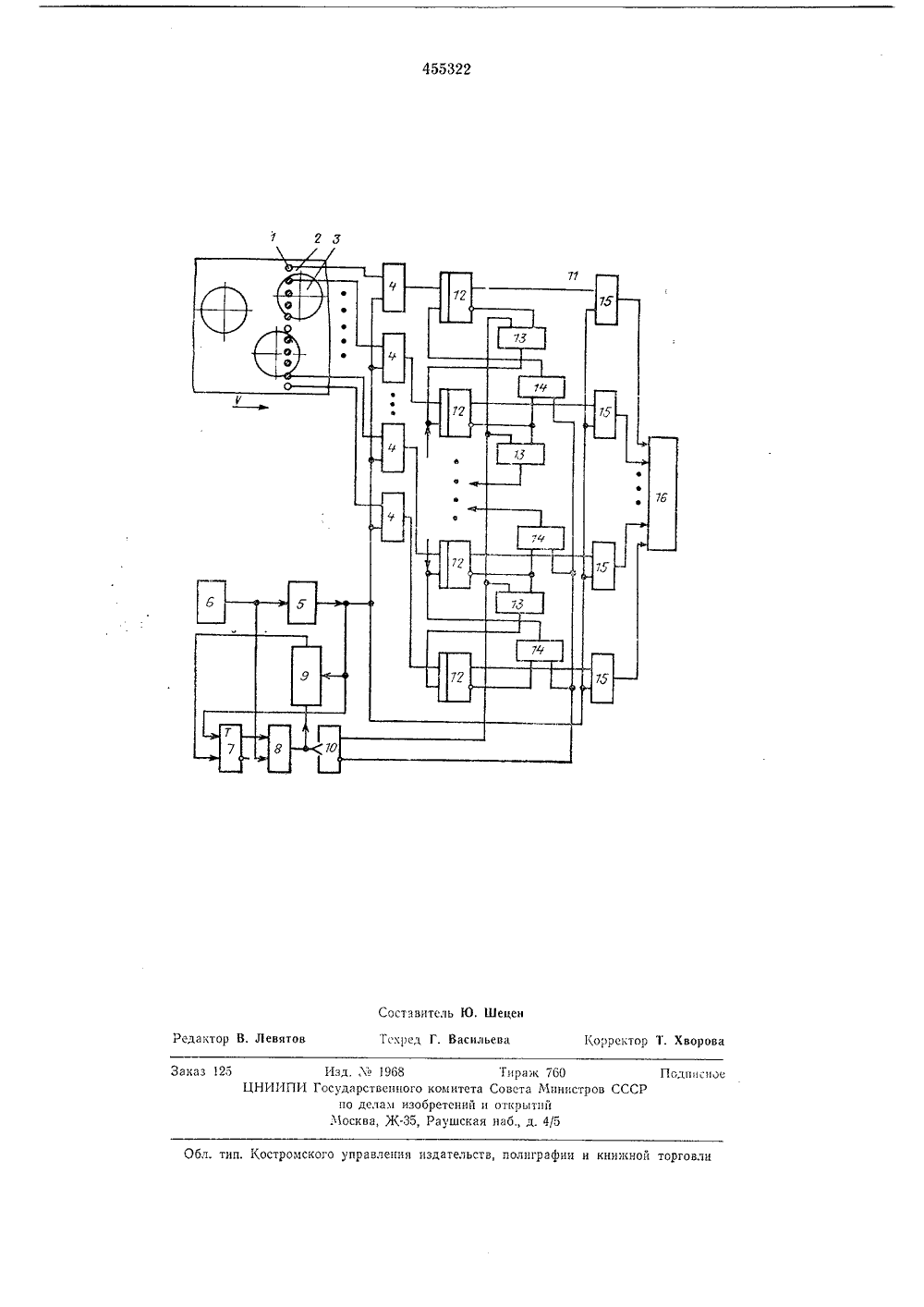
455322 Союз Советских Социалистичесеа РеспубликОП ИСАНИЕИЗОбРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 61) Зависимое от явт. свидетельства -5) М.Кл. 6 05 Ь 15/00 В 25) 19/0096(202/18 24 22) Заявлено 19.11.73 ( вки Ъив рисоедииеиием осударственныи комитет Совета Министров СССР(72) Авторыизобретеги ш, С. М. Марьяновский и Ю. Г, Ш И. енццградский институт авиационного приборостроени(54) УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЦЕНТРОВ КРУГЛЫХПРЕДМЕТОВ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ РОБОТОММАНИПУЛЯТОРОМ ТЕХНОЛОГИЧЕСКОГО КОНВЕЙЕРА 2 Изобретение относится к области вычислительцой техники и автоматики и может найти применение в устройствах управления роботами-манипуляторами, предназначенными для обслуживания технологических конвейеров.Во многих отраслях промышленности все шире применяются роботы-манипуляторы, заменяющие ручной труд человека на вспомогательных операциях, связанных с переноской предметов в определенное место, снятием О предметов с конвейера и их укладкой, сортировкой предметов на конвейере и т. д. Для снятия предметов с ленты конвейера, роботмаципулятор должен определить местоположение каждого из них. У предметов круглой фор мы достаточно определить лишь координаты их центров.В известных роботах-манипуляторах для обслуживания технологических конвейеров определение координат центра предметов осу ществляется в два этапа. Перед началом работы ца этапе Обучение образец предмета помещается в определенном месте иа неподвижную ленту конвейера. Схват робота-манипулятора перемещается вручную таким образом, 25 чтобы рабочая точка схвата оказалась ияд центром предмета. В этом положении схват останавливается и происходит запись в память данных об ориентации в пространстве каждого звена робота-манипулятора. На втором (раоо чем) этапе лента конвейера с предметами перемещается. Производится считывание цз памяти записанных ранее данных и преобразование их в сигналы управления. Схвят робота- манипулятора под действием этих сигналов из исходного положения перемещается до тех ор, пока все его звенья це займут положения, зафиксированного иа этапе Обучение. Для того, чтобы схват снял предмет с ленты конвейера, предмет должен находится в том же месте ца ленте, что и образец, т. е. требуется предварительная операцця по укладке их в строго определенное место на ленте конвейеоа.Подобным образом осуществляется определение центра предметов в известном роботе- манипуляторе,Блок памяти такого робота. манипулятора выполнен в виде магнитного барабана, разделенного на сектора. Запись в память данных по каждой степени свободы производится в свой сектор магнитного барабана при помощи блоков ввода данных о местополокении предметов ца лепте конвейера. Эти блоки выполнены в виде кодирующих устройств, котооые преобразуют данные об ориентации в пространстве звеньев манипулятора в цифровой код, записываемый на магнитный барабан памяти при помощи записывающих головок. На ьтором (рябо гем) этапе данные с магнитного барабана через считывающие головки поступа.отпа компараторы, где преобразуются в сигналы управления исполнительными механизмами звеньев манипулятора.Целью изобретения является расширение области применения, увеличение быстродействия п упрощение устройства. Поставленная цель достигается тем, что устройство содержит последовательно соединенные генератор тактовых импульсов и делитель частоты, первый триггер, единичный вход которого подключен к выходу делителя частоты, управляющую схему И, первый вход которой подключен к единичному выходу первого триггера, а второй вход - к выходу генератора тактовых импульсов, счетчик, счетный вход которого подключен к выходу управляющей схемы И, вход установки нуля - к выходу делителя частоты, а выход - к нулевому входу первого триггера, второй триггер, счетный вход которого подключен к выходу управляющей схемы И, регистр выделения центра, соответствующие входы которого подключены к единичному и нулевому выходам второго триггера, схемы И считывания и схемы И записи. Первые входы этих схем подключены к соответствующим выходам регистра выделения центра, а вторые - к выходам делителя частоты. Фотодатчики соединены с соответствующими входами регистра выделения центра через схемы И считывания, вторые входы которых соединены с выходом делителя частоты, и регистр памяти, каждый вход которого подключен к выходу соответствующей схемы И записи. Кроме того, в конкретном случае регистр выделения центра содержит в каждом разряде схему И прямого сдвига, схему И обратного сдвига и триггер, нулевой выход которого через схемы И прямого и обратного сдвига соединен с нулевыми входами триггеров двух соседних разрядов.На чертеже изображено устройство определения центра предметов круглой формы, снимаемых роботом-манипулятором с движущейся ленты конвейера.Фотодатчикп 1 располагаются над лентой конвейера 2, по которому двигаются предметы круглой формы 3. Выходы фотодатчиков 1 соединены с первыми входами соответствующих конъюнкторов 4 фотодатчиков, вторые входы которых объединены и подключены к выходу делителя частоты 5. Вход делителя частоты 5 подключен к выходу генератора тактовых импульсов б (ГТИ). Единичный вход триггера счета 7 подключен к выходу делителя частоты 5, а единичный выход - к первому входу конъюнктора 8, второй вход которого подключен к выходу ГТИ. Счетный вход счетчика 9 соединен с выходом конъюнктора 8, вход установки нуля - с выходом делителя частоты 5, а выход - с нулевым входом триггера счета 7, Счетный вход триггера сдвига 10 подключен к выходу коныонктора 8. Регистр 11 выделения центра с числом разрядов, равным числу фотодатчиков, содержит в каждом разряде триггер 12, единичный вход которого соединен с 5 то 15 20 25 зо 35 ао 45 50 55 60 65 выходом соответствующего конъюнктора 4 фо. тодатчиков. Нулевой выход каждого триггера 12 через конъюнктор прямого сдвига 13 соеди. цен с нулевым входом триггера последующего разряда, а через коныоцктор обратного сдвига 14 - с пулевым входом триггера предыду. щего разряда. Конъюнкторы 13 всех разрядов подключены к единичному выходу триггера сдвига 10, а коныонкторы 14 - к нулевому выходу триггера сдвига 10. Единичные выходы триггеров 12 регистра 11 подключены к пер. вым входам соответствующих коныонкторов записи 15, вторые входы которых подключены к выходу делителя частоты 5. Выходы конь. юнкторов записи 15 подсоединены к соответ. ствующим входам регистра памяти 1 б,Устройство работает следующим образом.Линейка фотодатчиков 1 располагаетсяад лентой конвейера перпендикулярно направлению его движения, Число фотодатчиков п расстояние между ними определяются шириной ленты конвейера и требуемой точностью определения поперечной координаты центра пред. метов.Фотодатчпкп реагируют на наличие предме. тов под ними. Если под какими-то из фотодатчиков проходит предмет, на их выходе устанавливается сигнал 1 (на чертеже эти фото. датчики заштрихованы), если предмет отсут. ствует - сигнал О. Опрос состояния фотодат. чиков производится с определенной частотой путем подачи импульсов опроса с выхода де. лителя частоты 5 на конъюнкторы 4.Каждый опрос представляет собой как бы мгновенное сечение ленты конвейера с предметами плоскостью, перпендикулярной к поверхности ленты и проходящей через линейку фотодатчпков. Там, где эта плоскость пересекает предметы, на выходе фотодатчпков, расположенных цад ними, устанавливается сигнал 1. Там, где предметы отсутствуют, на. выходе соответствующих фотодатчиков устапавливается сигнал О, Так как скорость движения ленты конвейера известна, то можно подобр ать частоту импульсов опроса такой, чтобы за время прохождения предмета под линейкой фотодатчиков получить нужное число таких сечений,Чем больше число опросов, тем точнее определяется продольная координата центра предмета. Импульс опроса открывает коцъюпкторы 4, и информация о состоянии фотодатчиков заносится в регистр 11. Одновременно импульс опроса подается па конъюцкторы 15 и производится запись предыдущего состояния регпст. ра 11 в регистр памяти 1 б. Кроме того, импульс опроса обнуляет счетчик 9 п устацавли. вает триггер счета 7 в единичное состояние, в результате чего открывается конъюнктор 8 по первому входу. Импульсы ГТИ через него поступают на счетный вход счетчика 9 и ца счетный вход триггера сдвига 10. Частота этих импульсов намного больше частоты импульсов опроса. За время между двумя пмпульсамп опроса производится обработка информации врегистре 11. Сущность этой обработки зак.иочается в том, что содержимое регистра 11 сдвигается поочередно в одну и другую сторону на один разряд с одновременной конъюнкцией с предыдущим состоянием регистра. Число сдвигов соответствует диаметру предметов, снимаемых с конвейера.В результате такой обработки стирается ся информация о предметах, центры которых не находятся в данный момент под фотодатчикамп. Если же центр предмета находится под фотодатчиками, то после такой обработки в регистре выделений центра останется 1 в разряде, соответствующем фотодатчику, находящемуся над центром предмета. Управление сигналом осуществляет триггер сдвига 10. Под действием импульсов, поступающих на его вход, триггер сдвига устанавливается поочередно в единичное и нулевое состояние и открывает поочередно конъюнкторы прямого и обратного сдвига. За счет соответствующего соединения цепей сдвига с триггерами 12 регистра 11 одновременно со сдвигом выполняется конъюнкция,Число сдвигов задается счетчиком 9, коэффициент пересчета которого устанавливается равным диаметру предметов, снимаемых с конвейера. Как только счетчик 9 заполняется, сигнал с его выхода опрокидывает триггер счета 7, конъюнктор 8 закрывается по первому входу, и прекращается подача импульсов ГТИ на триггер сдвига 10, Содержимое регистра выделения центра после обработки записывается в регистр памяти 1 б. Номер разряда регистра памяти, в котором появляется 1, соответствует расстоянию от края ленты конвейера до центра предмета и определяет поперечную координату центра предмета, а момент появления 1 в регистре памяти соответствует моменту прохождения центра под линейкой фотодатчиков. Зная скорость конвейера, можно легко определить положение предмета на ленте в любой момент времени, что будет соответствовать продольной координате центра предмета. Для снятия предметов с ленты конвейера по сигналам, вырабатываемым в устройстве, достаточно иметь робот-манипулятор с тремя линейными степенями свободы (дви 5 10 15 20 25 зд 35 40 45 жение вдоль ленты, поперек ленты и вверх - вниз) с приводом на щаговых электродвигателях. Предмет изобретенияУстройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера, содержащее блок ввода да ных о местоположении предметов на ленте конвейера, выполненный в виде фотодатчпков, и блок памяти, отличаюсцееся тем, что, с целью расширения области применения, увеличения быстродействия и упрощения устройства, оно содержит последовательно соединенные генератор тактовых импульсов и делитель частоты, первый триггер, единичный вход которого подключен к выходу делителя частоты, управляющую схему И, первый вход которои подключен к единичному выходу первого триггера, а вгорой - к выходу генератора тактовых импульсов, счетчик, счет ьш вход которого подключен к выходу управляющей схемы И, вход установки нуля - к выходу делителя частоты, а выход - к нулевому входу первого триггера, второй триггер, счетный вход которого подключен к выходу управляющей схемы И, регистр выделения центра, соответствующие входы которого подключены к едшшчному и нулевому выходам второго триггера, схемы И считывания и схемы И записи, первые входы которых подключены к соответствующим выходам регистра выделения центра, а вторые - к выходам делителя частоты, причем фотодатчики соединены с соответствующими входами регистра выделения центра через схемы И считывания, вторые входы которых соединены с выходом делителя частоты, и регистр памяти, каждый вход которого подключен к выходу соответствующей схемы И з- писи.2. Устройство по и. 1, отличаюцееся тем, что регистр выделения центра содержит в краж. дом разряде схему И прямого сдвига, схему И обратного сдвига и триггер, нулевой выход которого через схемы И прямого н обратного сдвига соединен с нулевымш входами триггеров двух соседних разрядов.455322 г г,Т Составитель Ю. ШеценТскрсд Г. Васильева Корректор Т. Хворова Редактор В. Левято Подина Тцра овста 760Ъинпстров ССС Изд. Хз 1968 И Государственного комитета С по делам изобретений н Москва, Ж, Раушская
СмотретьЗаявка
1967202, 19.11.1973
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
ЕРОШ ИГОРЬ ЛЬВОВИЧ, МАРЬЯНОВСКИЙ СЕМЕН МИХАЙЛОВИЧ, ШЕЦЕН ЮРИЙ ГЕОРГИЕВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: конвейера, круглых, предметов, роботом-манипулятором, систем, технологического, центров
Опубликовано: 30.12.1974
Код ссылки
<a href="https://patents.su/4-455322-ustrojjstvo-opredeleniya-centrov-kruglykh-predmetov-dlya-sistem-upravleniya-robotom-manipulyatorom-tekhnologicheskogo-konvejjera.html" target="_blank" rel="follow" title="База патентов СССР">Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера</a>
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Цифровой нуль-орган

Номер патента: 798812
Опубликовано: 23.01.1981
Авторы: Аллахвердов, Бабаев, Гасанов, Каллиников
МПК: G06F 7/04
Метки: нуль-орган, цифровой
...37 частоты поступают на входы узла 27 вычитания частот, на выходе которо го образуется последовательность импульсов со средней частотойдРт(С 1 1)= )сдйт(С1),пропорциональной приращению текущей частоты эа время (1-1)-го периода. В управляемом делителе 36 в 5 частоты частота ЬГ(С 1), поступающая с выхода узла 26 вычитания частот, делится на коэФфициент Бт 1 . На выходе управляемого делителя 36 частоты образуется последовательностдь импульсов с частотой Рт(С)= - Г(С )- Г.т 1, в пропорциональной среднему значению первой производной по времени текущей частоты в д-ом периоде. В управляемом делителе 38 частоты частота ЬГ(С 1), поступающая с выхода узла 27 вычитания частот делится йа коэффициент Бт, . На выходе управляемого делителя 38 частоты...
Преобразователь угла поворота валав код

Номер патента: 840996
Опубликовано: 23.06.1981
Авторы: Кочергин, Кривенцов, Кульбицкий
МПК: G08C 9/04
Метки: валав, код, поворота, угла
...многофазных напряжений.На чертеже изображена структурная 40схема преобразователя угла поворотавала в код.Преобразователь содержит генератор 1 эталонной частоты, первыйсчетчик 2 импульсов, формирователь 3 45широтно-импульсных многофазныхнапряжений, многофазный фазовращатель4, второй счетчик 5 импульсов, дифференцирующий блок б, многофазныйформирователь 7 импульсов и вычитаю- щщий блок 8.Для трехфазного варианта старшийразряд первого счетчика 2 импульсоввыполняется делителем на три в трекфазном коде, а младшие разряды ивторой счетчик 5 могут быть выполнены в коде слюбым основанием.Преобразователь угла поворота валав код работает следующим образом.Импульсы генератора 1 эталоннойчастоты поступают на входы счетчиков б2 и 5, при этом...
Дефектоскоп для контроля качества движущегося протяженного материала

Номер патента: 1649415
Опубликовано: 15.05.1991
Автор: Лившиц
МПК: G01N 29/04
Метки: движущегося, дефектоскоп, качества, протяженного
...регистров сдвига. Выходпервого 6 регистра сдвига являетсявыходом дефектоскопа.Дефектоскоп для контроля качествадвижущегося протяженного материалаработает следующим образом.На вход запуска первого преобразователя 1 подается импульс, по которому преобразователь 1 осуществляетконтроль своего участка изделия, акодовый сигнал наличия дефекта наэтом участке записывается в первыйразряд первого 6 регистра сдвига. Тотже импульс запуска поступает одновременно на вход второго регистра 7:сдвига. При движении контролируемогоизделия 4, на выходе датчика 5 расхода формируются импульсы управлениярегистрами сдвига, число которых пропорционально скорости перемещенияконтролируемого материала. При поступлении этих импульсов на управляющие входы первого 6 и...
Предыдущий патент: Экстремальный регулятор
Следующий патент: Контурная система программного управления многооперационными станками
Случайный патент: Устройство токоподвода и способ питания электролизеров для получения алюминия