Патенты с меткой «погрешности»
Устройство для контроля кинематической погрешности зубчатых передач

Номер патента: 1237902
Опубликовано: 15.06.1986
Автор: Василенко
МПК: G01B 7/287
Метки: зубчатых, кинематической, передач, погрешности
...суммирующий, а какой вычитающий. Одновременно с поступлением первого синхронизирующего импульса на синхронизирующий вход управляемой линии 16 задержки осуществляется формирование 55 первых импульсов последовательностей, следующих через оборот начального и конечного звеньев с помощью блока 6 90 8синхронизации по команде блока 7 управления. Информация с выхода сумматора 5, поступаюшая через блок 10 сопряжения, передается блоком 7 управления на первый вход блока 8 буферной памяти, и по его командам заносится в блок 8 буферной памяти для одного оборота начального звена механизма. При этом используются синхрониэирующие импульсы, служащие для синхронизации сдвига информации в управляемой линии 16 задержки. После поступления й импульсов на-...
Способ определения стабильности токовой и угловой погрешности трансформаторов тока

Номер патента: 1238012
Опубликовано: 15.06.1986
МПК: G01R 35/02
Метки: погрешности, стабильности, токовой, трансформаторов, угловой
...трансформатора тока либо во время или по окончании его испытайий повторно измеряют, но- З 5 вое значение 3 тока намагничивания при напряжении ц . Отношение 3 /3 характеризует степень стабильности токовой и угловой погрешностей трансформатора тока для измерений.В ряде случаев при применении предлагаемого способа могут возникнуть затруднения из-за отсутствия данных значенийи особенно х . Допустимо принять эти значения равны ми нулю, так как они для подавляющего большинства трансформаторов тока пренебрежительно малы по сравнению . со значениями хии, кроме того, некоторая неточность в определении значения 1 и соответственно значе 1 М ний 3 и 3 мало скажется на отношении 3 (3 ввиду того, что трансформаторй тока для измерений...
Измеритель погрешности полной шкалы цифроаналогового преобразователя

Номер патента: 1238240
Опубликовано: 15.06.1986
МПК: H03M 1/66
Метки: измеритель, погрешности, полной, преобразователя, цифроаналогового, шкалы
...ЦАП 14 с формирователя 1 подаются логические единицы, включающие все разряды ЦАП 14 и формирующие на его выходе напряжение полной шкалы. В первый такт работы от внешней команды "Пуск" запускается первый одновибратор 19 блока 3 управления, на выходе которого формируется управляющий сигнал, замыкающий ключи 404, 7 и 8, В,результате на выходе усилителя 17 получается напряжением (с учетом разнополярности напряжений Е, и 11 Ш), равное 45 Ьц =Е 1 4 ГЪ ВЗгдеНапряжение 411 запоминается АЗУ 12.Во второй такт работы в момент воз вращения одновибратора 19 в исходное состояние задним фронтом последнего происходит запуск в 1 торого одновибратора 20. При этом ключи 4, 7 и 8 раз.мыкаются, а ключа 5 и 6 замыкаются под действием управляющего...
Способ измерения погрешности синусно-косинусного вращающегося трансформатора

Номер патента: 1241363
Опубликовано: 30.06.1986
Авторы: Евдокимова, Попов
МПК: G01R 31/34, H02K 24/00
Метки: вращающегося, погрешности, синусно-косинусного, трансформатора
...угла Ь связана ской определения модуля соотноше- З ле АЧма, погрешно в угловых се оши ние ндах; исло угло товорота рото ых проводятся ра, в которизмерения;коэффициент электрическойредукции вращающегосятрансформатора;текущее значение угла пос АБ с лля 40 тинного значения моддиеариФметичесссае качестве иринимают ср=1и орота ротора Составитель В.Техред О,Сопка КомаровКоррек едактор И Е. Сирохма сарда Заказ 3607/50 Тираж 631 НИИПИ Государственног по делам изобретений 035, Москва, Ж, РаПоцпикомитета СССРи открытийшская набд. /5 ное Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. Изобретение относится к измерительным электрическим машинам и может быть использовано при стендовых испытаниях синусно-косинусных...
Устройство для измерения функции распределения случайной погрешности аналого-цифровых преобразователей
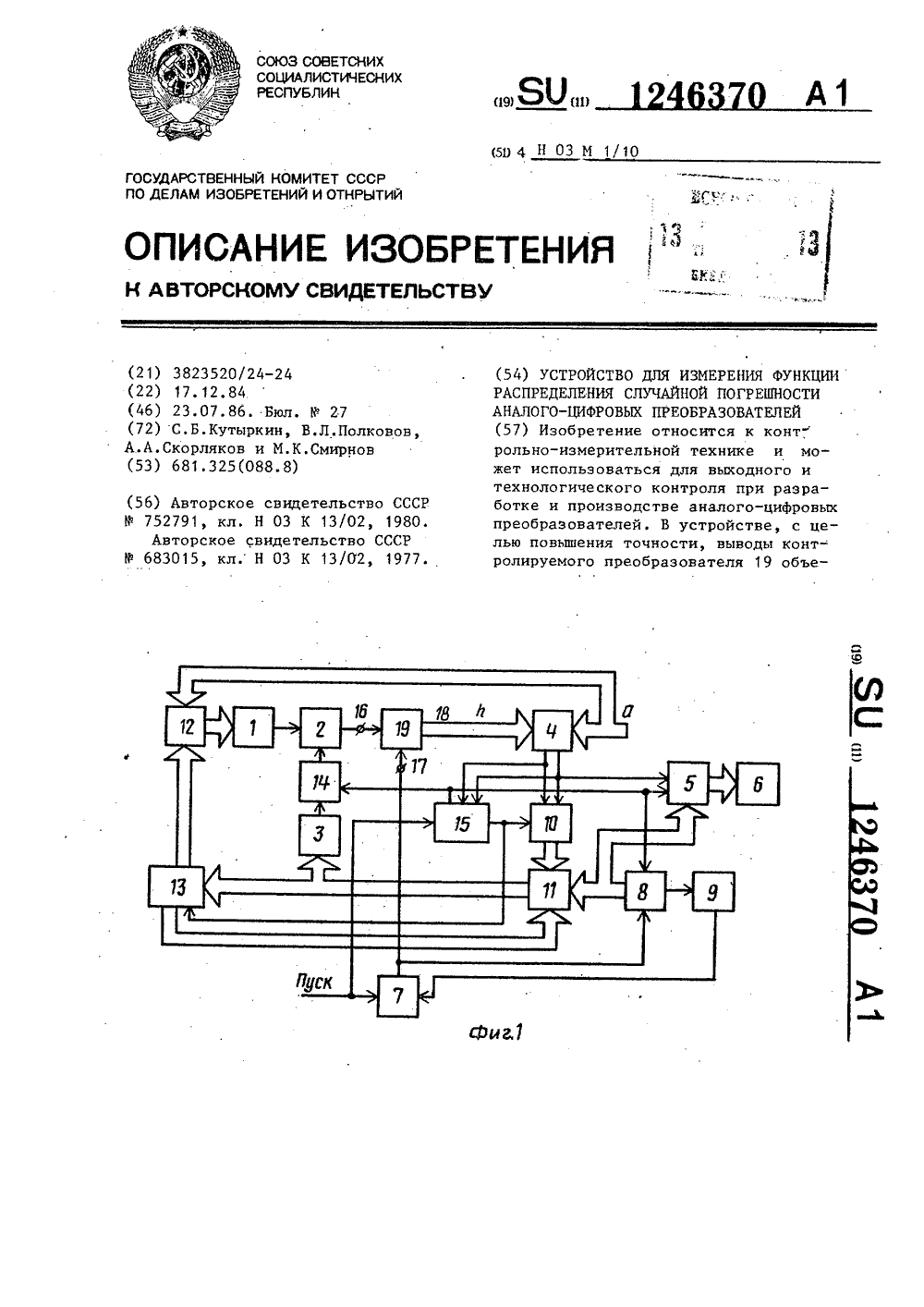
Номер патента: 1246370
Опубликовано: 23.07.1986
Авторы: Кутыркин, Полковов, Скорляков, Смирнов
МПК: H03M 1/10
Метки: аналого-цифровых, погрешности, преобразователей, распределения, случайной, функции
...счетчика 10, в регистр 13, а по заднему фроцту сбрасывает счетчик 10 в исходное состояние, После этого начинается второй этап измерение функции распределения. Код поправки, запомненный регистром 13, подается на второй сумматор 12 ца вход источника 1 и, если разрешающая способность указанной ранее цепи обратной связи на первом этапе выше, чем у источника 1, то младшие разряды кода поправки с вторых выходов регистра 13 подаются на сумматор 11.Поправка, отработанная на первом этапе, позволяет значительно уменьшить на втором этапе рабочий диапазон измерителя и, следовательно, повысить разрешающую способность и точность оценки функции распределения и смещения, Код поправки подается в течение второго этапа не в младшие разряды счетчика...
Способ определения погрешности измерителя контактной разности потенциалов

Номер патента: 1255943
Опубликовано: 07.09.1986
МПК: G01R 19/00, G01R 35/00
Метки: измерителя, контактной, погрешности, потенциалов, разности
...измерителя. На выходе усилителя 4 будет присутствовать остаточный некомпенсируемый потенцеалОценим ошибку, возникающую иэ-за неполной компенсации.Коэффициент усиления усилителя совместно с коэФфициентом преобразо 5943 вания динамического конденсатораэкспериментально можно апрЕделить иэлииейной ветви зависимости У=ЕЙ)(фиг. 2) как:5 а 11 ьКА =ь 11 где К1 ОА- коэффициент усиления усилителя 4;- коэфФициент преобраЗованиядинамического конденсатора;- изменение напряжения навыходе усилителя,- изменение компенсационногонапряжения.Иэ фиг, 2 можно определить, что погрешность измерителя ат неполной компенсации составит: 11 ь15Е Ц = + -- )Нос КА(2) где 11 щ - остаточный некомпенсируемый потенциал, Для осуществления способа на эта;- лонный...
Устройство для измерения функции распределения случайной погрешности аналого-цифровых преобразователей
Номер патента: 1256202
Опубликовано: 07.09.1986
Авторы: Кутыркин, Полковов, Скорляков, Смирнов, Темногрудов
МПК: H03M 1/10
Метки: аналого-цифровых, погрешности, преобразователей, распределения, случайной, функции
...арифметическим блоком 12, реали зующим алгоритм1256202Рассматриваемый алгоритм реализуется с помощью имеющихся в предлагаемом устройстве сигналов А Г.Ф Э 5 где1 при ЬМ или 41 ) 71 О3 -1 при ЬйИ или А Ч) путем накопления результатов пере- множения значения Н Формируемых счетчиком 6, и значений зр (Ь-И), Формируемых элементом 4 сравнения кодов.Операцию формирования значения произведения осуществляют в арифметическом блоке 12 второй коммутатор 16 совместно с блоком 14 элементов НЕ. При этом блок 14 формирует инверсные значения вспомогательного воздействия, а второй коммутатор 16 передает на первый вход второго сумматора 17 либо прямые, либо инверс- д 5 ные значения воздействия И в зависимости от результата сравнения кодов Ь и (И+1) в...
Устройство для измерения погрешности вращающегося трансформатора

Номер патента: 1262649
Опубликовано: 07.10.1986
Авторы: Аксененко, Васильев, Епифанов, Нокалн
МПК: H02K 24/00
Метки: вращающегося, погрешности, трансформатора
...угловые положения ротора 1 испытуемого ВТ. При этом выходной сигнал с датчика 4 положения поступает на преобразователь 9. Выходной сигнал датчика 4 положения соответствует заданной угловой координате выходного вала угломерно-задающего. устройства 2, так как на выходном валу устройства 2 непосредственно установлен датчик 4 положения, Далее выходной вал датчика 4 положения многократно с помощью преобразователя 9 преобразуется в код, который используется далее как эталонный и соответствует данной реальной угловой координате расположения выходного вала угломерно-задающего устройства 2, так как на выходном валу устройства 2 непосредственно установлен датчик 4 положения. Далее выходной вал датчика 4 положения многократно с помощью...
Способ определения фазоамплитудной погрешности фазометров

Номер патента: 1264099
Опубликовано: 15.10.1986
МПК: G01R 25/00
Метки: погрешности, фазоамплитудной, фазометров
...разных ослаблениях аттецюатора,получают фаэоамплитудную характеристику фазометра ц фазовую характеристику аттецюатора на частоте д, 20Устройство работает следующим образом.Сигнал частоты и с амплитудой Ц,с выхода генератора 1 синусоидальныхсигналов на вход канала, напримеропорного, фаэометра 2 (вход раэвяэывающего блока 2,1) подается через перестраиваемый аттенюатор 3, установ-ленный в нулевое положение, и коммутатор 4, который находится в положении с, на вход измерительного канала(вход развязывающего блока 2,2)через коммутатор 5, который находитсяв положении а, а на вход блока 6 смещения частоты - непосредственно. На З 5гетеродинцый вход Фазометра 2 с выхода блока 6 смещения частоты подаетсясигнал, например, частотыь)-Й...
Способ оценки амплитудно-фазовой погрешности фазометров

Номер патента: 1269050
Опубликовано: 07.11.1986
МПК: G01R 25/00
Метки: амплитудно-фазовой, оценки, погрешности, фазометров
...переключения переключателя 2 иэ положения с в положение 50о вновь фиксируют показание фазометра Ф , определяемое следующим выражением:1269050 1 фг Ри ДЧию 6 Р -дР ипж 1Рфг 3М- фазовый сдвиг, вносимыйидеальной КС-цепью 3, работающей в режиме интегрирования (переключатель2 в положении Х ); Рг, г М, - дополнительные фаз овыесдвиги вследствие отклонения реальных величинэлементов КС-цепей 4 и 3 соответственно от идеаль Оных значений;дРмп - амплитудно-фазовая погрешность фазометра;Р - собственная погрешностьФазометра на проверяемойточке.Так как вследствие инвариантности фазового сдвига КС-цепи 4, - %и + % гЧи= 9020(3)Радуг Риг+ дРяг 4 иг= 90,то после суммирования выражений (1) и (2) получают с учетом уравнений 25 (3)Ч- Ч+ ЧггаР,+ 2 а Р,рп+ 2...
Устройство для контроля кинематической погрешности передач

Номер патента: 1270550
Опубликовано: 15.11.1986
Авторы: Быков, Егоров, Латыев, Лисовский, Мастеница, Примаков, Терентьев
МПК: G01B 7/30
Метки: кинематической, передач, погрешности
...контролируемыймеханизм 3.При этом сигналы с датчиков 1 и 2поступают на соответствующие счетчики 4 и 5 импульсов. Со счетчика 4 сосчитанное текущее число импульсов подается в оперативный запоминающий блок 15 (ОЗБ), в котором значение числа импульсов, поступивших с датчика быстроходного звена, записывается в соответствующие ячейки памяти. Записьосуществляется по команде счетчика 1 бадреса, который управляет импульсамидатчика 2, прошедшими через счетчик 5и компаратор 17. Таким образом, вОЗБ 15 записывается массив количества 5импульсов, характеризующих положение быстроходного звена, соответствующих контролируемым положениям тихоходного звена. В момент времени, когда счетчик 22 сосчитает число импульсов, соответствующее числу...
Устройство для определения погрешности фазовращателей

Номер патента: 1275765
Опубликовано: 07.12.1986
Автор: Соколов
МПК: H03M 1/10
Метки: погрешности, фазовращателей
...первые входы элементов И 5 и 6, на вторых входах которых присутствуют стартовые и стоповые импульсы соответственно, Первый импульс с выхода компаратора 5 после прихода разрешающего уровня с элемента И 12 появляется на выходе элемента И 5 и с ее выхода поступает на первый управляющий вход блока.Следующий импульс с выхода компаратора формируется на выходе элемента И 6 и по второму управляющемуовходу блока 7 останавливает процесс измерения.Таким абра.зом, на информационном выходе блока 7 имеем фактическое значение сдвига фазы выходного напряжения СКВТ 2 относительно питающего напряжения.Следующий импульс с генератора 8 импульсов переводит счетчик 11 в положение "010". которое обеспечивает управляющий сигнал на втором выходе дешифратора 12....
Устройство для контроля погрешности величины сопротивления резистивных элементов переменных резисторов с осью вращения

Номер патента: 1292045
Опубликовано: 23.02.1987
Авторы: Евдокимов, Лев, Литвинюк, Стремовский
МПК: H01C 10/24
Метки: величины, вращения, осью, переменных, погрешности, резистивных, резисторов, сопротивления, элементов
...(у основания начального вывода) сигнал разбаланса измерительного моста равен нулю и самопишущий прибор 20 фиксирует на диаграммной ленте (не показана) линию нулевых погрешностей. Дальнейший поворот кулачка 36 после обеспечения краткого соприкосновения токо- съемного контакта 5 к резистивному элементу 44 позволяет пружине 33 отвести токосъемный контакт 5 от оправки 45 в крайнее положение. При этом одновременно замыкается контакт 37, посредством которого через БУ 38 размыкается контакт 39 АЗУ 16, временно отключая СП 20 от выхода блока 1 контроля. После этого БУ 38 включает кратковременно электромагнит 28 фиксатора 26, выводя последний против действия пружины 27 из впадины дели- тельного диска 22, и запускает электродвигатель 25...
Способ оценки погрешности положения детали конструкции при циклическом нагружении

Номер патента: 1293552
Опубликовано: 28.02.1987
Авторы: Сызранцев, Тютрин, Удовикин
Метки: детали, конструкции, нагружении, оценки, погрешности, положения, циклическом
...комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д, 4/5Подписное Производственно-полиграФическое предприятие, г,ужгород, ул. Проектная, 4 Изобретение относится к машиностроению и может быть использованодля контроля зубчатых механизмов.Цель изобретения - снижение трудоемкости за счет определения координаты точки максимальных усталостных повреждений и оценки погрешности положения детали по смещениюэтой точки,На чертеже изображен фрагмент детали конструкции,На детали 1 установлен датчик 2усталостных повреждений, у которогопри циклических деформациях происходят структурные изменения и на поверхности образуются темные пятна.Способ осуществляется следующимобразом.Определяют направление возрастания усталостных...
Устройство для автоматического измерения погрешности фазовращателя

Номер патента: 1295515
Опубликовано: 07.03.1987
МПК: H03M 1/10
Метки: погрешности, фазовращателя
...на входе данных и на входе начальной установки триггера 21 генератором 22 импульсов сформирован сигнал высокого уровня, подготавливающий второй тактируемый триггер 21 к срабатыванию, которое происходит при изменеГ нии сигнала на выходе элемента И-НЕ 8 с низкого уровня на высокий, При этом на инверсном выходе триггера 21 формируется сигнал низкого уровня. После изменения генератором 22 импульсов сигнала на входе начальной установки триггера 21 с высокого уровня на низкий на инверсном выходе триггера 21 происходит изменение сигнала с низкого уровня на высокий. Это изменение уровня сигнала, поступая на вход вычитания реверсивного счетчика 19, компенсирует лишний, неинформационный импульс, поступивший на вход суммирования реверсивного...
Устройство для измерения погрешности преобразователя угла поворота вала в код

Номер патента: 1295516
Опубликовано: 07.03.1987
Автор: Варданян
МПК: H03M 1/10
Метки: вала, код, поворота, погрешности, преобразователя, угла
...(2 + 1)-го выхода дешифратора 4, это свидетельствует о совмещении начал отсчета преобразователей 2 и 23,В этом случае триггер 16 опрокидывается, открывая элемент И 17 и разре шая прохождение импульсов смены кода с выхода блока 18 реальных сигналов на входы элементов И 7-9. Если в момент поступления импульса начала отсчета на информационном входе триг-Зо гера 16 единичный уровень отсутствует, совмещение начал отсчета достигается вращением корпуса испытуемого преобразователя 23 до совпадения моментов поступления на триггер 16 сигналов начал отсчета преобразователей 2 и 23. Через один из элементов И 7-9, оказавшийся открытым и соответствующим величине погрешности испытуемого преобразователя 23, импульс смены кода поступает на счетный вход...
Способ контроля кинематической погрешности передач

Номер патента: 1298508
Опубликовано: 23.03.1987
Авторы: Иванов, Полудницина, Шилова
МПК: G01B 5/20
Метки: кинематической, передач, погрешности
...и второй входы блока 5 измерения 35разности частот связаны соответственно с выходами квантовых генераторов1 и 2 входного и выходного звеньевконтролируемой передачи 3,Способ осуществляется следующим образом.Устанавливают на входном и выходном звеньях контролируемой передачи 3 кольцевые оптические квантовые ге нераторы 1 и 2, обкатывают контролируемую передачу, по разности частот, поступающих с кольцевых генераторов 1 и 2 угла поворота на блок 5 измерения разности частот, определяют кинематическую погрешность передачи 3.Кольцевой генератор выходного звена имеет ось 4 вращения, перпендикулярную оси вращения выходного звена контролируемой передачи 3, устанавливают на этой же оси 4 датчик 7 угла поворота кольцевого генератора и двигатель 6, в...
Способ контроля кинематической погрешности передач

Номер патента: 1298525
Опубликовано: 23.03.1987
Автор: Ионак
МПК: G01B 7/287
Метки: кинематической, передач, погрешности
...4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 Изобретение относится к машиностроению, а именно к средствам и методам контроля зубчатых передач.Цель изобретения - расширение технологических возможностей путем обес печения контроля многопоточных передач за счет суммирования синфазных сигналов с датчиков входных звеньев,На чертеже представлена блок-схема устройства, реализующего способ. 10Устройство включает в себя датчики 1 и 2 начальных звеньев 3 и 4 передачи 5, датчик 6 конечного звена 5 передачи, два Фазовращателя 7 и 8, соединенные с выходами датчиков 1 и 2 начальных звеньев 3 и 4, сумматор 9, первый и второй входы которого соединены соответственно с выходами первого и второго Фазовращателей 7 и 8,...
Способ измерения систематической погрешности аналого цифровых преобразователей

Номер патента: 1300634
Опубликовано: 30.03.1987
Авторы: Кутыркин, Петров, Полковов, Скорляков, Смирнов
МПК: H03M 1/10
Метки: аналого, погрешности, преобразователей, систематической, цифровых
...Р(6а)и Р(Ь ( а) путем изменения компенсирующей величины хзнак ее приращения ьхдолжен быть противоположензнаку разности /Ь-а/ т.е, ах-5(Ь-а), Таким образом, для обеспечения отрицательной обратной связи и компенсации Ас с помощью х= йссигнал 2 должен быть сформированв соответствии с правилом 2=-5 (Ь-а) ОПрименение равномерно распределеннойвспомогательной величины и, имеющейту же физическую природу, что и величина х , при формировании входноговоздействия на контролируемые АЦП 25не изменяет в силу симметричности еезакона распределения, соотношениевероятностей Р(Ьа) и Р(Ь ( а),Можно показать, что математическоеожидание усредняемых значений /О ь/5 (д.+х+ О) равноМ/О /х:ы(у)ду, где и)(у) - плотность вероятности суммы у = а + х, Из...
Способ измерения динамической погрешности аналого-цифровых преобразователей

Номер патента: 1302431
Опубликовано: 07.04.1987
Авторы: Загурский, Зарумба, Семенова
МПК: H03M 1/10
Метки: аналого-цифровых, динамической, погрешности, преобразователей
...из выражения Б (а) = М3 з;З (а,(2М Т к где М- математическое ожиданиевыражения, стоящего вквадратных скобках;И - количество значений крутизн сигнала 1;Т - средняя длительность интервала времени, при котором сигнал сохраняет постоянную крутизну между моментами времениМя(д) =) с,Ы),=1. где С . (оЗ) - Фурье-преобразованиефрагмента сигнала,имеющего .-ю крутизну;д =. 2 И - циклическая частота.Динамическая погрешность АЦП при преобразовании сигналов, имеющих на любой частоте энергию, не превышающую энергию сигнала 1 на этой же частоте, не больше, чем динамическая погрешность при преобразовании сигнала 1.Таким образом, полностью удовлет:,воряется адекватность условия измерения и реальных условий использования испытуемого АЦП, что...
Устройство для контроля кинематической погрешности зубчатых колес

Номер патента: 1305525
Опубликовано: 23.04.1987
МПК: G01B 5/20
Метки: зубчатых, кинематической, колес, погрешности
...3 ил1305525под выступ направляющей 7. Гайкой 14, навинчивая ее на тягу 12, регулируют усилие поджима каретки 8 к направляющей 7. Это усилие обеспечивает стабильный прижим каретки 8 к направляющим 6 и 7. Благодаря этому при перемещении каретки 8 по направляющим 6 и 7 ликвидируется отрыв нижней плоскости каретки 8 от опорных поверхностей направляющих 6 и 7. Таким образом, при обжатии контролируемых колес получаем стабильный результат измерения.Формула изобретенияУстройство для контроля кинематической погрешности зубчатых колес, содержащее статину, две шпиндельные бабки с преобразователями угловых перемещений, одна из которых расположена на станине, две направляющие, одна из которых прямоугольная, закрепленные на станине, каретку, с рас"...
Способ контроля кинематической погрешности зубчатых колес

Номер патента: 1314224
Опубликовано: 30.05.1987
МПК: G01B 5/20
Метки: зубчатых, кинематической, колес, погрешности
...при измерении электрической емкости в зазорах между зубьями обкатываемых образцового и контролируемого зубчатых колес 1 и 4.На фиг. 2 приняты следующие обозначения:СТ текущие Ординаты емкости 40и времени,Т - период начала пересопряжения профилей,Т - период пересопряжения про 2филей; 45Т - период конца пересопряжезния профилей,лС - величина кинематической 2профилем образцового колеса 1,6 - кривая изменения емкостимежду правым профилем контролируемого колеса 4 илевым профилем образцовогоколеса 1,7 - тарировочная кривая изменения емкости (например,между двумя образцовымиколесами).Способ осуществляют следующим образом,Устанавливают образцовое и контролируемое зубчатые колеса 1 и 4 наноминальном межосевом расстоянии, обкатывают их и...
Цифровое устройство для контроля кинематической погрешности механической передачи

Номер патента: 1322083
Опубликовано: 07.07.1987
МПК: G01B 7/287
Метки: кинематической, механической, передачи, погрешности, цифровое
...погрешности передачи 1 начинается при поступлении на какой-либо из делителей 083 2и 5 частоты числа импульсов, соответствующего установленному коэффициенту деления.Например, на делитель 4 частоты поступает и импульсов, при этом на его выходе появляется импульс, по фронту которого на выходе делителя 6 частоты устанавливается уровень логической , На входах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 8 установится логическая комбинация "1 О", которая переводит его выход в состояние логической , при этом импульсы с выхода импульсного датчика 2 через элемент И 10 начинают поступать на вход счетчика 11 импульсов. Одновременно положительный перепад напряжения, поступающий с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 8 на синхровход 1 К-триггера 9, фиксирует его выход...
Устройство для измерения функции распределения погрешности аналого-цифровых преобразователей
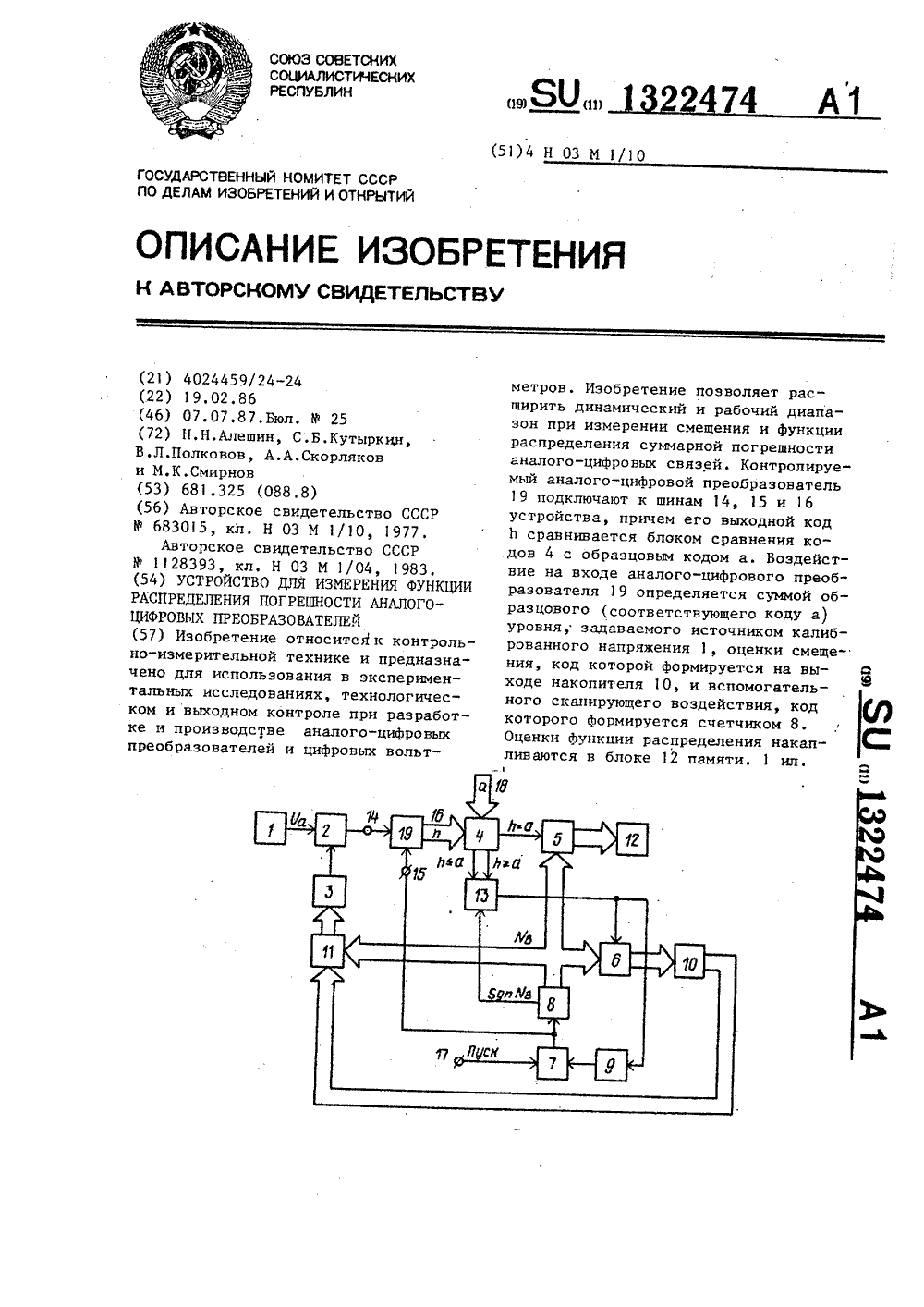
Номер патента: 1322474
Опубликовано: 07.07.1987
Авторы: Алешин, Кутыркин, Полковов, Скорляков, Смирнов
МПК: H03M 1/10
Метки: аналого-цифровых, погрешности, преобразователей, распределения, функции
...погрешности в ячейках блока 12 памяти Формируется импульсами . подтверждения равенства Й=а, поступающими с соответствующего выхода блока 4 сравнения кодов, аналогично Формированию оценки в известном устройстве. Оценка смещения суммарной погрешности в предлагаемом устройстве осуществляется накоплением в в накопителе 10 кодов, проклапанированных коммутатором 6, Это обеспечивает получение оценки весовым (или численным) методом.Принципиальное отличие предлагаемого устройства заключается в органиэации сигнала, управляющего работой коммутатора 6. Если в известном устройстве коды И поступают на вход накопителя 1 О при появлении сигнала подтверждения равенства Ь=а на соответствующем выходе блока 4, то в предлагаемом устройстве прохождение...
Способ измерения относительной погрешности электросчетчиков и устройство для его осуществления

Номер патента: 1323988
Опубликовано: 15.07.1987
Авторы: Лежнин, Тимофеев, Уткин
МПК: G01R 35/00
Метки: относительной, погрешности, электросчетчиков
...с выхода нуль-индикатора счетчика 6 (будем называть этот импульс сигналом обнуления) не проходит на входы триггера 12 реверса, поэтому реверс счетчика 6 сигналом обнуления не осуществляется. Через счетчик 20 сигнал обнуления не проходит вследствие того, что счетчик имеет коэффициент пересчета, равный трем, и, следовательно, только каждый третий сигнал обнуления может перебросить триггер 12 реверса и осуществить реверс счетчика 6, а через конъюнктор 14 сигнал обнуления не проходит в виду того, что в первом такте с выхода триггера 10 тактов на вход конъюнктора 14 поступает сигнал 0. В первом такте первого варианта работы импульсом обнуления перебрасывается триггер 21, с выхода которого на вход конъюнктора 14 поступает сигнал 0. Этим...
Устройство для контроля кинематической погрешности зубчатых передач

Номер патента: 1325294
Опубликовано: 23.07.1987
Авторы: Павленко, Погорелов, Попов, Степняков
МПК: G01B 7/287
Метки: зубчатых, кинематической, передач, погрешности
...погрешности зубчатых колес.Устройство включает в себя дискретные преобразователи 1 и 2 углов поворота с равномерной шкалой, предназначенные для установки на ведущем и ведомом звеньях контролируемых колес 3 и 4, фазометр 5, подключенный к первым выходам преобразователей 1 и 2, преобразователь 6 угла поворота с неравномерной шкалой, предназначенный для установки на ведомом звене, второй фазометр 7, подключенный к вторым выходам обоих преобразователей 2 и 6 ведомого звена, и сумматор 8, подключенный к выходам первого и второго фазометров 5 и 7.Угловой шаг между рисками неравномерной шкалы преобразователя 6 модули- рован в соответствии с числом зубьев ведомого контролируемого колеса 4 и предписанным законом модификации зубьев. Так,...
Способ измерения кинематической погрешности механизмов с дробным передаточным отношением

Номер патента: 1325295
Опубликовано: 23.07.1987
Авторы: Брицкий, Звягин, Медунецкий, Мурашев, Ноздрин
МПК: G01B 7/30
Метки: дробным, кинематической, механизмов, отношением, передаточным, погрешности
...3, блок 4 управления вращением датчика тихоходного звена, делители 5 и 6 частоты, подключенные к выходам датчиков 1 и 2 соответственно, фазометр 7, соединенный входами с выходами делителей 5 и 6, и регистратор 8, подключенный к выходу фазометра 7.Способ осуществляют следующим образом.Устанавливают датчики 1 и 2 угловых перемещений на быстроходном и тихоходном звеньях механизма 3, определяют разность фаз и по ней оценивают кинематическую погрешность механизма, а датчик 2 тихоходного звена вращают в направлении, противоположном направлению вращения тихоходного звена с угловой скоростью, определяемой из соотношенияю =й(- 1) Рад/с,Ы где зв - угловая скорость звена, на котором установлен подвижный датчик угловых перемещений;- передаточное...
Способ измерения угловой погрешности положения штрихов лимба

Номер патента: 1326884
Опубликовано: 30.07.1987
Авторы: Егоров, Латыев, Митрофанов, Петров
МПК: G01B 21/00
Метки: лимба, погрешности, положения, угловой, штрихов
...импульсов подключены к первым входам счетчиков 12и 13. Вторые входы счетчиков 12 и 13подключены к генератору 14 импульсовстабильной частоты, а выходы подключены к блоку 15 деления, который своим выходом связан с первым входомблока 16 вычитания. Выход блока 16вычитания и его второй вход соответственно последовательно связаны сблоком 17 умножения, блоком 18 суммирования, регистрирующим блоком 19,блоком 20 управления и кодонабирателем 21.Способ осуществляют следующим образом.Контролируемый лимб 3 приводят вовращение под датчиками 1 и 2 сигналов о наличии штрихов лимба. На кодонабирателе 21 устанавливают номинальную угловую цену импульса Чэ с контролируемого лимба 3. Затем включают 5 блок 20 управления, который вырабатывает управляющие...
Способ измерения погрешности положения штрихов круговых шкал и устройство для его осуществления

Номер патента: 1326886
Опубликовано: 30.07.1987
Автор: Седухин
МПК: G01C 1/06
Метки: круговых, погрешности, положения, шкал, штрихов
...первым и вторым выходамикорректирующего блока 15. Интегрирующее звено 21 и корректирующее звено 23 предназначены для обеспеченияустойчивости и заданных показателейкачества схемы с ФАПЧ и получениязаданного интервала Т временногоусреднения,При выполнении опорно-измерительного блока 5 по второму варианту50(фиг. 2 б) генератор 13 опорной частоты, а также замкнутые в кольцодвухвходовый детектор 14, корректирующий блок 15, двигатель 1, шпиндель2 с оправой 3 круговой шкалы и от 55счетный блок 4 образуют (как и дляфиг, Зб) по отношению к выявляемомусигналу схему синхронного детектирования с ФАПЧ, В этом случае выход 86 бной сигнал отсчетного блока 4 исполь.зуется в качестве сигнала обратнойсвязи н схеме с ФАПЧ. В отличие отсхемы...
Способ определения погрешности магнитоэлектрического прибора от неуравновешенности

Номер патента: 1328760
Опубликовано: 07.08.1987
МПК: G01R 3/00
Метки: магнитоэлектрического, неуравновешенности, погрешности, прибора
...тяжести Р, возникающего из-за наличия неуравновешенности подвижной части. После этого снимают ток 1 и фиксируют максимальную величину Б импульсного напряжения, наводимого в рабочей обмотке при движении подвижной части в нулевое положение из положения ц +Щ причем 8760 г 2 Ио Ь)(3) Используя зависимость угла поворота йодвижной части от величины тока, протекающего по рабочей обмотке, т.е. учитывая, что величине Пг пропорциона лен согласно (2) некоторый ток 1ггфкоторая в данном случае является максимально возможной для данного прибора, так как величина 0 получена в условиях, когда момент от сил тяжести максимален,Описанный порядок действий может быть автоматизирован с использовани" ем устройства, приведенного на фиг.2. находят разницу в...