Устройство для программного управления скоростью шагового электропривода
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки









Текст
-28115,1972 про И п ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТЮ(54) 571 УСТРОЙСТВО ДЛЯ ПРОГРАММНОГОУПРАВЛЕНИЯ СКОРОСТЬЮ ШАГОВОГО ЭЛЕКТРОПРИВОДА, содержащее первый и второйсчетчики импульсов, интерполятор,подключенный выходами к информационным входам коммутаторасвязанноговыходами с Фазовыми входами шаговогоэлектропривода, элемент ИЛИ, соединенный с выходами первого и второго элементов И, третий, четвертый, пятыйэлементы И, о т л и ч а ю щ е е с ятем, что, с целью расширения областиприменения устройства за счет возможности управления режимами работы элек;,тропривода, в него введены третийсчетчик импульсов, первая, вторая,третья, четвертая и пятая тактовыешины и сумматор, подключенный выходомзнакового разряда к управляющемувходу коммутатора и к первым входампервого, второго, третьего, четвертого и пятого элементов И, первым инФормационным входом - к шине "Ускорение", вторым инФормационным входом -к выходу первого счетчика имп первым управляющим входом - к ду пятого элемента И и к управляющему входу второго счетчика импульсов, а вторым управляющим входом - к первой тактовой шине и к счетному входу второго счетчика импульсов, соединенного установочным входом с шиной "Максимальная скорость", а выходом переноса старшего разряда - с вторым входом первого элемента И и с вторым входом третьего элемента И, подключенного выходом к суммирующему входу первого счетчика импульсов, связанного сбросовым входом с установочным входом сумматора, со сбросовым входом второго Е счетчика импульсов, с шиной "Установка в ноль", со вторым входом пятого элемента И н со сбросовым входом третьего счетчика импульсов, подключенного счетным входом к выходу элемен- а та ИЛИ, установочным входом - к шине "Приращение координаты", а выходы переноса старшего разряда - к третьему входу третьего элемента И и к второму входу четвертого элемента И, связанного выходом с вычитающнм входом первого счетчика импульсов, а третьим входом - с пятой тактовой шиной и с третьим входом пятого элемента И, причем второй вход второго элемента И, четвертый вход третьего элементаи третий вход первого элемента Иодключены соответственно к второй,третьей и четвертой тактовым шинам.444 2 Наиболее близким по технической сущности к предлагаемому устройству является приводное устройство импульсного двигателя, содержащее счетчики импульсов, интерполятор, подключенный выходами к информационным входам коммутатора, связанного выходами с фазовыми входами шагового электро- привода, элементы И, ИЛИ 21 .50Недостатком этого устройства является отсутствие самонастройки на рес,жимы работы, Кроме того, регулирование скорости при разгоне и торможении выполняется устройством по параболическому закону, в результате чего имеют место переменные ускорения, отрицательно влияющие на механизм привода. 1 1 137Изобретение относится к автоматике и электротехнике и предназначено для использования в системах числового программного управления, в которых изменение скорости движения исполнительного органа, например, пишущего узла чертежно-графического автомата,. осуществляется регулированием частоты управляющих сигналов интерполятора, каждому из которых со ответствует изменение координаты исполнительного органа на элементарный шагИзвестно устройство для регулирования частоты, предназначенное для 151 управления пдзиционированием посредством дискретного электропривода, содержащее два счетчика, три делителя частоты, коммутатор, задатчик ус" корения, вентиль и генератор опбрйых 20 импульсов, Регулирование частоты этим устройством осуществляется изменением ширины пачек импульсов Я .Недостатком этого устройства является то, что оно не обеспечивает 25 расчет длины участков разгона, постоянной скорости, торможейия и оперативное изменение величины ускорения и замедления, так как в нем величина ускорения и замедления привода может .З 0 устанавливаться различной путем перестройки 8 делителя. Это затрудняет использование устройства там, где требуется оперативно изменять величину ускорения и замедления в зависи мости от нагрузки привода, например в зависимости от холостого хода, ког - да разгон и торможение должны выполняться с большим ускорением, и от рабочего хода под нагрузкой, когдаI ускорение должно быть уменьшено. Программа ускорения и "замедления жесткая и реализована на,вентильных схемах, что существенно затрудняет использование устройства там, где нагрузка привода меняется и требуется оперативное изменение режима регулирования,Цель изобретения - расширение области применения устройства за счет возможности управления режимами работы электропривода.Поставленная цель достигается тем, что в устройство для программного управления скоростью шагового электро- привода, содержащее первый и второй счетчики импульсов, интерполятор, подключенный выходами к информационным входам коммутатора, связанного выходами с фазовыми входами шагового электропривода, элемент ИЛИ, соединенныйс выходами первого и второго эле- Ментов И, третий, четвертый и пятый элементы И, введены третий счетчик импульсов, первая, вторая, третья, четвертая и пятая тактовые шины и сумматор, подключенный выходом знакового разряда к управляющему входу коммутатора и к первым входам первогб, второго, третьего, четвертого и пятого элементов И, первым информационным входом в :к шине "Ускорение", вторым информационным входом - к выходу первого счетчика импульсов, пер - вым управляющим входом - к выходу пятого элемента И и к управляющему входу второго счетчика импульсов, а вторым управляющим входом - к первой тактовой шине и к счетному входу второго счетчика импульсов, соединенного установочным входом с шиной Максимальная скорость", а выходом переноса старшего разряда - с вторым входом первого элемента И и со вторым входом третьего элемента И, подключенного выходом к суммирующему входу первого счетчика импульсов, связанного сбросовым входом с установочным входом сумматора, со сбросовым входом второго счетчика импульсов, с шиной Установка в ноль, с вторым входом пятого элемента И и со сбросовым входом третьего счетчика импульсов, подключенного счетным входом к выходу элемента ИЛИ, установочным входом - к шине "Приращение,ко 1ординаты , а выходы переноса старшего разряда - к третьему входутретье го элемента И и к второму входу четРазгон Постоянная скоростьТорможение 3 1137вертого элемента И, связанного выходомс вычитающим входом первого счетчикаимпульсов а третьим входом - с пятой тактовой шиной и с третьим входом пятого элемента И, причем второй вход второго элемента И, четвертый вход третьего. элемента И и третий вход первого элемента И подключены соответственно к второй, третьейи четвертой тактовым шйнам.,10На фиг. 1 представлена блок-схемаустройства для программного управления скоростьюшагового электроприво-да; на фиг. 2 - диаграммы распределения во времени сигналов управляемойчастоты; на фиг. 3 - примеры траекторий движения исполнительного органаэлектропривода; на фиг. 4 - диаграммы изменейия.управляемой частоты,Устройство для программного управления скоростью шагового электропривода содержит сумматор 1, первый 2,,второй 3 и третий 4 счетчикй, коммутатор 5, шаговые электродвигателиб, элемент ИЛИ 7, первый - пятыйэлементы И 8-12, интерполятор 13, шины связи 4-33.Сумматор 1 накапливающего типаслужит для отсчета времени между соседними управляющими сигналами, счетчик 2, работающий в реверсивном режиме, служит для счета коэффициента Кпропорционального текущей частотеуправляющих сигналов. Совместно сумматор 1 и счетчик 2 служат для выработки управляющих сигналов при раз 35гоне (фиг. 2-4, участок ОА), когдачастота сигналов увеличивается, припостоянной скорости (фиг. 2-4, участки АВ) когда. частота сигналов но- "- Ф40стоянна и. при торможении(фиг. 2-4,участки ВС), когда частота сигналовуменьшается,Счетчик 3, работающий в режиме вычитания, служит для определения мо мента достижения максимальной скорости, в который заканчивается режим разгона (фиг. 2 ц, 3, точка А) и начинается режим постоянной скорости.Счетчик 4, работающий в режиме вычитания, служит для определения момента окончания режима постоянной скорости и перехода на режим торможения, Коммутатор 5 служит для пбдключе=" ния обмоток шаговых электродвигателей. 55 6, каждый из которых отрабатывает элементарные шаги Ах и 4 (фиг. 3) иобеспечивает перемещение исполнитель 444 4ного органа при отработке отрезкатраектории, определенного приращениями Ьх и Ьу но кбординатам х и у соответственно.Элементы ИЛИ 7, И 8 и 9 служат дляформирования на шине 21 сигналов отсчета элементарных шагов вычитаниемединиц из содержимого счетчика 4,элемент И 10 - для формирования в режиме разгона сигналов на шине 22 прибавления единиц к содержимому счетчика 2, элемент И 11 - для формирова".:ния в режиме торможения сигналов нашине 23 вычитания единиц из содержимого счетчика 2, элемент И 12 - дляформирования сигналов на шине 24вычитания из содержимого сумматора 1чиста Тм,ц,пропорционального величине ускорения, и занесения в счетчик3 числа Тм пропорционального величйне максимальной скорости,Интерполятор 13 служит для формирования сигналов элементарных шагов,поступающих через коммутатор 5 на шаговые двигатели 6,По шинам 14-18 на вход устройствапоступают тактирующие сигналы. Шина,19 соединяет инверсный выход переноса старшего разряда счетчика 3 с вторыми входами элементов И 8 и 10, ашина 20 . - выход переноса старшегоразряда счетчика 4 с третьим входомэлемента И 1 О и вторым входом элемента И 11. Шины 19 и 20 служат для передачи сигналов установки режимов работы устройства согласно табл. 1.Таблица 1 Шина 19 Шина 20 Режим работы Приме ч ание. Знаку "+" соответствует сигнал положительного уровня, а "-" - нулевого.Шийа 25 соединяет инверсный выход знакового разряда сумматора 1 с управляющим входом коммутатора 5 и с первыми входами элементов И 8-12, Она служит для передачи сигнала разреше-.11374 1 Т- иТ К ния выработки элементарного шага дви",гателями б,и сигнала разрешения срабатывания элементов И 8-12.По шинам 26 на вход устройствапоступают сигналы, пропорциональныеббльшемУ из пРиРащений х или 4 Уна шинах 27 установлены сигналы, пролорциональные величине Т.ц, - минимальному периоду между сигналамивыполнения элементарных шагов, соответствующему максимально допустимойскорости отработки траектории. На шинах 28 установлены сигналы, пропорциональные величине Т рокс - максимальному периоду между сигналами выполнения элементарных шагов, соответствующему величине максимально допустимого ускорения при разгоне или торможении.Сумматор 1 может быть изготовлен, 20например, на микросхемах серии 133 ИИЗ,счетчики 2-4 - на микросхемах серииЗЗИЕ 7, логические элементы - намикросхемах серии 133 ЛАЗ, 133 ЛР 1.Устройство работает следующим образом.В исходном состоянии на вход пошине 31 поступает сигнал "Установкав ноль", в результате чего устройство подготавливается к работе: сумма- ЗОтор 1, счетчики 2 и 3 устанавливаются в нулевое состояние, а в счетчик4 по шинам 26 "Приращение координаты"заносится большее из чисел ах илиур характеризующих отрезок шаговойтраектории,Устройство работает циклично,Длительность каждого цикла во времени определяетсявеличиной где Е 1 = сонэк - время выполненияподцикла.К :. 1, 2 рш в каждом циклережима разгона,К = ш в режиме постоянной скорости,р. ЕОК, - шр ффор ср 1в каждом цикле режима торможения,т.е, этот коэффициент изменяется на 44 Юединицу при переходе с одного цикла в другой в режимах разгона и торможения и остаегся постоянным в режиме постоянной скорости.тмакоВ каждом цикле выполняется подЦиклов опорной постоянной) частоты. Длительность каждого подцикла определяется длительностью выполнения тактирующих сигналов Т,-Т поступающих с постоянной частотой на вход по тактирующим шинам 14-8 соответственно.Первый подцикл каждого цикла выполняется с участием элементов ИЛИ 8 и И 9-12, когда на шине 25 установлен сигнал положительного уровня. Остальные подциклы каждого цикла выполняются без участия элементов ИЛИ 8, И 9-12, которые в это время заблокированы сигналом нулевого уровня на шине 25.Частота сигналов на шине 25, равная по величине К определяет часматоту управляющих сигналов х(й) и(или) у(С)р (фиг. 2), поступающих на коммутатор 5 и разрешающих прохождение сигналов элементарных приращенийх, Ь у с интерполятора3 на шаговые двигатели 6, Интерполятор 13 работает в старт-стопном режиме, т.е. он запускается по заднему фронту сигнала на шине 25 и вырабатывает очередной управляющий сигнал на шинах 29 и (или) 30.Работу устройства рассмотрим на примере отработки исполнительным органом траектории движения (фиг. 34) при следующих начальных данных: б х=Ь У = бр Тмокс = 12 Тмииьс = 600 мкс, тогда аТдо = 7,2 мсвремя между первым и вторым сигналами управляемой частоты (фиг. 2 о).р которые определяют начальную скорость разгона, 6 ТА 11 = 1,8 мс - время между сигналами постоянной (максимальной частоты, которое определяет допустимую (максимальную) скорость движения исполнительного органа.В табл. 2 приведена последовательность операций, выполняемых предложенным устройством.-5 - 2 = -7 Первый сигнал управляемой частоты (фиг. 2 а, точка 0) появляется на шине 25 в первом подцикле первого цикла так как сумматор 1 установлен в нулевое состояние сигналом "Установка в ноль"на шине 31, К этому вре-мени на шине 27 интерполятором 13 установлен сигнал элементарного при"- ращения х. Совпадение сигналов на шинах 29 и 25 обеспечивает перекомму тацию фаэ. с помощью шин 32, и шаговый двигатель отрабатывает первый элементарный шаг Ьх иэ точки О в точку М (фиг, 3).9 11374Сигнал положительного уровня на выходе знакового разряда сумматора 1 (шина 25) находится. до тех пор, пока содержимое сумматора равно или боль " ше. нуля. По такту Тг,первого подцик" ла из содержимого сумматора вычитается число Тк и на шине 25 устанавливается сигнал нулевого уровня, аЭто состояние знакового разряда сумматора 1 не изменяется до тех пор, пока в результате выполнения и операций видабмаксгде ) - номер подцикла;и - количество подциклов в цикле, 20 содержимое сумматора 1 станет больше или равно нулю, что является сигналом на выполнение очередного цикла.В первом подцикле второго цикла на шине 25 устанавливается второй сигнал управляющей частоты (фиг. 2 с, К этому времени на шинах 29 и 30 установленыинтерполятором сигналы положительного уровня л х и Д у соответственно. В результате совпадения всех этих сигналов на шинах 32 и 33 коммутатор 5 вырабатывает очередные сигналы выполнения комбинированного шага. из точки М в точку й (фиг. За) и т.д.35Операции в счетчиках 2 и 4 и в сумматоре 1 (указанные в скобках столбца 3)выполняются в первом подцикле каждого цикла, а и операций в сумматоре 1 (указаны не в скобках) и счетчике 3 выполняются по такту Т в каждом подцикле указанного цикла.В реяиме разгона (циклы 1-4 в пер,- вом подцикле каждого цикла) из содераа жимого счетчика 4 вычитается две единицы по тактам Т и Т 4. Вычитание второй единицы по такту Т, выполняется для того, чтобы учесть заранее количество шагов, необходимьи для вы-, полнения торможения. По такту Т к содержимому счетчика 2 прибавляется единица и, таким образом, коэффициент К увеличивается,на единицу. По такту Т в счетчик 3 заносится число 44 ,1 ОТ, а из содержимого сумматора 1минвычитается число Т. На этом первыйподцикл каждого цикла заканчивается.Режим разгона заканчивается (после.выполнения цикла 4, табл. 2), когдав счетчике 3 образуется положительное число Т " и. В этом случае нашине 19 устанавливается сигнал нулевого уровня, который блокирует элементы И 8 и 1 О.Таким образом, запрещается увеличение значения К, в счетчике 2 и вычитание вторых единиц из содержимогосчетчика 4 по такту Т .В режиме постоянной скорости ( циклы 5-8) из содержимого счетчика 4 впервом подцикле каждого цикла вычитается единица по такту Т. Длительность времени между соседними сигналами управляющей частоты определяетсяв этом режиме при постоянном значенииК . Режим постоянной скорости закан 1чивается (в первом подцикле девятогоцикла, табл. 1), когда в счетчике 4образуется отрицательное число.В режиме торможения (циклы 9-11)на шине 20 установлен сигнал пулевогоуровня, который блокирует элементИ 10 и разрешает работу элементаИ 11, т.е. вычитание в первом подцикле каждого цикла единицы из содержимого счетчика 2. Таким образом, вэтом режиме значение К, уменьшаетсяв каждом цикле на единицу и частотауправляющих сигналов уменьшается(фиг. 21., отрезок ВС), Торможениезаканчивается, когда в счетчике 2образуется число К = О. После этогоустройство готово принять очереднойсигнал начальной установки на шине3, который целесообразно подаватьс задержкой на Т с чтобы избежатьперегрузок двигателей на границахотрезков траекторий.Если длина траектории, которуюдолжен отработать исполнительный орган, малая (фиг. 3), например, приначальнь 1 х данных ЬХ = 2 6 У = 5,Тапке= 12 Три = 3, то создаетсяситуация, когда, не достигнув допустимой скорости, должен начаться ре"жим торможения.В табл. Э приведена последовательность операций, выполняемых в каждомцикле при этих начальных данных.5 1- =0 (1-5 =-4)12 : 1 = 12 На фиг. 2 и 2приведены диа граммы распределения во времени сигналов управляющей частоты у (.1), х (й), поступающих на электродвигате-. ли по шинам 32 и 33.Первый цикл выполняется аналогич- Зр но описанному процессу. В первом под" цикле третьего цикла в счетчике 2 выполняются две операции, По такту Тк к содержимому счетчика 2 прибавляется единица, поступающая в виде сиг нала с элемента И 10 по шине 22 на счетный вход этого счетчика. По такту Т 4 из содержимого счетчика 4 вычи - тается вторая единица и на шине 20 устанавливается сигнал нулевого уров.-о ня, который определяет режим торможения, поэтому по такту Т иэ содержимого счетчика 2 вычитается единица, .поступающая в виде сигнала вычитания; по шине 23. В результате двух опера ций в этом цикле значение К в счетчике 2 не изменится. В дальнейшем продолжается режим торможения до пол- . ной отработки траектории. На фиг. 4 а и 4 б приведены диаграммы изменения частоты управляющих сигналов, пропорциональной скорости движения исполнительного органа при отработке траекторий, представленных на фиг. З,а и 3 б соответственЙно, Угол К= - в здесь пропорциана- дф 1 макс Счетчик 3 Счетчик 4 Шина 25(1 аьи и) 312 (О 5-20 3- 6 (О 3 - 20 3-6 (О-1=0 3-12 (О . - 1-2(0 лен ускорению прй разгоне и торможении,Эффективность предложенного устройства по сравнению с базовым объектом, в качестве которого выбран прототип, состоит в том, что предложенное устройство существенно повышает производительность отработки траекторий, не допуская перегрузки электродвигателей по ускорению. Для сравнения производительности рассматриваемых устройств выберем отрезок траектории, представленный на фиг. Зо., при условии нагрузки на электродвигатели по ускорению, не превышающей численно величины 1/12.Предложенное,устройство формирует. управляющие сигналы с величинами вре- мени между соседними сигналами, равмаксными, . 0 = А, ПоследовательВность величинвремени между моментами формирования соседних сигналов (фиг. 2 а ) в этом случае: 12 дй;6 де; 4 дй; 3 дй; 3 М; 3 дС; Здс;3 дй; 4 дй; 6 дй; 12 Ь 1; т.е. общее время отработки отрезка траектории составляет 59 дй = 35,4 мс.Величина ускорения определяется согласно. выражению 0 = -аТ; д;,Устройство-прототип формирует управлякзцие сигналы с величинами времеТираж 863 Государственн елам изобрете МоскваЖ,3оренко Корректор Л. Пилипенко Подписного комитета СССРй и открытийаушская наб д.
СмотретьЗаявка
3597190, 30.03.1983
ПРЕДПРИЯТИЕ ПЯ А-3327
ФЕДОРЕНКО МИХАИЛ ПЕТРОВИЧ, ПОЛИЩУК АНАТОЛИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 19/40, G05B 19/4103
Метки: программного, скоростью, шагового, электропривода
Опубликовано: 30.01.1985
Код ссылки
<a href="https://patents.su/9-1137444-ustrojjstvo-dlya-programmnogo-upravleniya-skorostyu-shagovogo-ehlektroprivoda.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления скоростью шагового электропривода</a>
Устройство для умножения частоты на код (его варианты)

Номер патента: 1149253
Опубликовано: 07.04.1985
Авторы: Кириллов, Пешков, Скворцов
МПК: G06F 7/68
Метки: варианты, его, код, умножения, частоты
...благодаря обеспечению разделения во времени момента переходного процесса в счетчике3 1149и записи кода в регистр при появлении выходного импульса.Поставленная цель достигаетсятем, что в устройство для умножениячастоты на код, содержащее генератор 5тактовых импульсов, делитель частоты, счетчик, регистр, управляемыйделитель и формирователь импульсов,вход которого соединен с информационным входом устройства, а первый Ювыход - со входами сброса делителячастоты и счетчика, выходы которогосоединены с информационными входами1регистра, выходы которого соединены сс информационными входами управляющего делителя, выход которого подключен к выходу устройства, тактовый вход управляемого делителя соединен с тактовьаю входом делителячастоты и...
Устройство для отображения графической информации на экране электронно-лучевой трубки

Номер патента: 1525726
Опубликовано: 30.11.1989
Авторы: Микалаускас, Скучас
МПК: G09G 1/16
Метки: графической, информации, отображения, трубки, экране, электронно-лучевой
...4 меняется и начальный адрес развертки строки (счетчики 22 и 23 блока 1 синхронизации), Первая строка изображения на экране ЗЛТ начинается не с ячейки памяти блока 4 В , а с Ви т.д. Тогда ячейки памяти блока 4 сдвигаются следующим образом:В В В. + В р В ВюВо Ви Вяп+ Вяп+Рь+ъф я 2 22 25 ф ф ф 2 ьСя кривых адресный счетчик 24 через коммутатор 13 подает код на счетчик 14, который определяет, сколько секций блока 3 заполнено информацией. одновременно на такое же число пери 5 рдов тактовой частоты сдвигается синхроимпульс строки относительно начала 4 троки. Движущееся изображение на эк 1 ане ЭЛТ 12 формируется путем сдвига инхроимпульса строки с каждым кадром иа интервал времени, равный записанной информации с блока 3 в течение данного...
Устройство для контроля кардиостимуляторов

Номер патента: 976995
Опубликовано: 30.11.1982
Авторы: Бельгов, Дубровский, Осташкин, Тогунов
МПК: A61N 1/36
Метки: кардиостимуляторов
...второй делитель частоты, связанный со схемами И и первым делителем частоты. Формирователь синхроимпульсов связан с первой схемой пропускания, третьим коккутатором, генератором меток времени и счетчиком, Формирователь сигналов сброса подключен к первому делителю частоты, второму делителю частоты и третьему коммутатору. Первый коммутатор соединен с усилителем и распределителем импульсов, а второй коммутатор связан с третьим коммутатором и первым делителем частоты.На чертеже представлена схема предлагаемого устройства.Устройство содержит усилитель 1, первый коммутатор 2, блок 3 памяти, выходной усилитель 4, формирователь 5 синхроимпульсов, третий коммутатор б, второй коммутатор 7, распределитель 8 импульсов, формирователь 9 сигнала сброса,...
Стробоскопический преобразователь электрических сигналов последовательности импульсов
Номер патента: 1386914
Опубликовано: 07.04.1988
Авторы: Березовский, Громницкий, Сидор
МПК: G01R 13/02
Метки: импульсов, последовательности, сигналов, стробоскопический, электрических
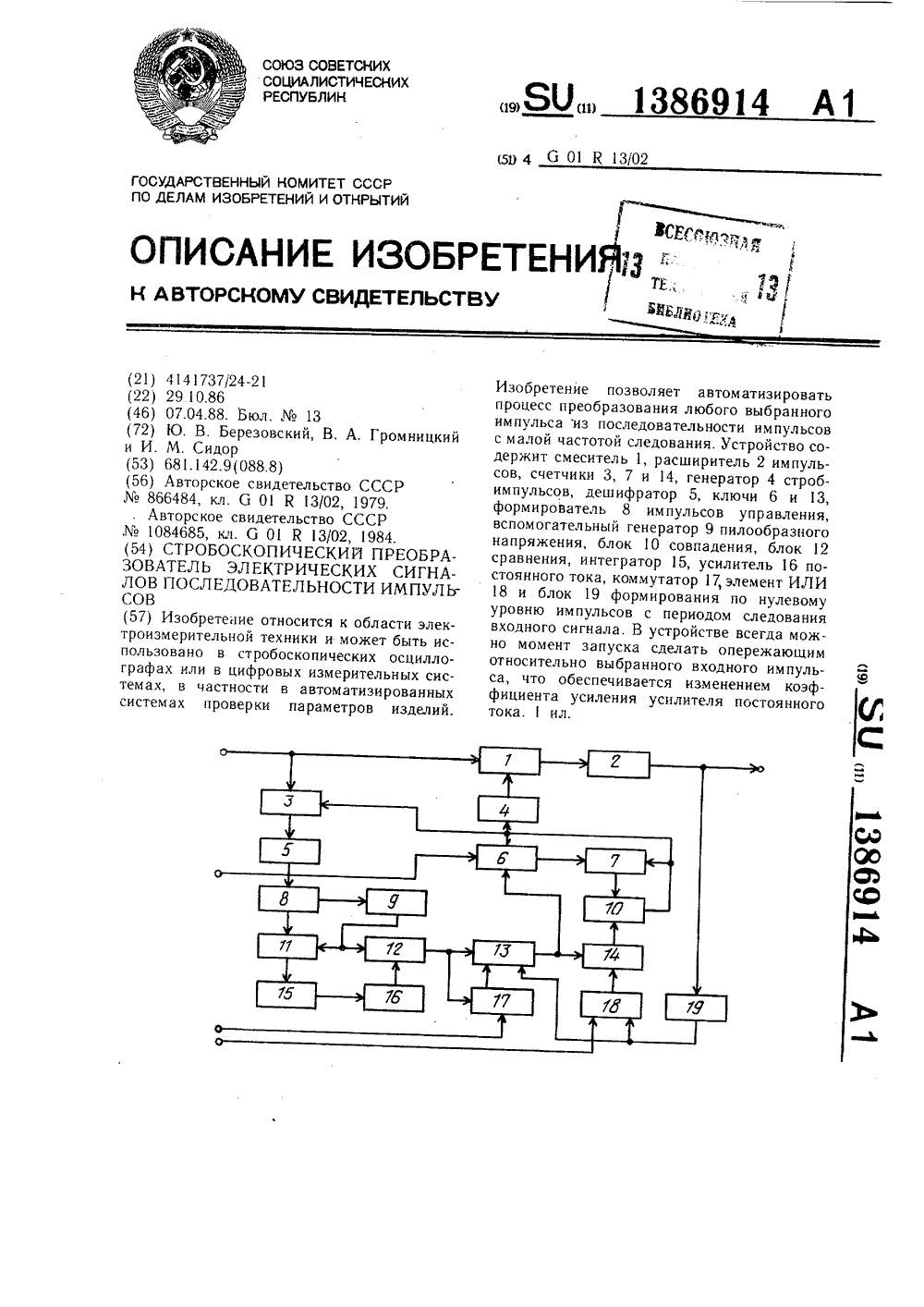
...импульсов. Этот формирователь вырабатывает импульс, равный по длительности всей последовательности импульсов (пачки импульсов) для запуска вспомогательного генератора 9 пилообразного напряжения, и импульс, равный по длительности времени 7 от начала последовательности до приходаимпульса, порядковый номер которого записан в регистре формирователя. Этот импульс управляет работой ключа 11, на аналоговый вход которого подается пилообразное напря-жение от вспомогательного генератора 9.С выхода ключа 11 это пилообразное напряжение заряжает конденсатор интегратора 15 до напряжения, величина которого зависит от времени открытого состояния ключа 11, т. е. от выбора порядкового номера импуль-са входной последовательности. Это напряжение...
Устройство для выделения первого и последнего импульсов в серии

Номер патента: 1739493
Опубликовано: 07.06.1992
Авторы: Каменский, Кишенский, Панова, Христенко
МПК: H03K 5/153
Метки: выделения, импульсов, первого, последнего, серии
...элемента И - НЕ 6 - высокий потенциал, на его выходе появляется низкий потенциал, чеоез элемент И - НЕ 7 переводящий триггер 3 в нулевое состояние, закрывая элемент И - НЕ 6.В дальнейшем по каждому входному импульсу серии триггеры 2 и 3 устанавливаются в единичное состояние, а затем, по окончании предыдущего задержанного импульса с выхода элемента 1, возвращаются в исходное состояние. Таким образом, после последнего задержанного импульса серии на элементе 1, триггеры 2 и 3 будут в нулевом состоянии, открывая элемент ИЛИ 5 и закрывая элемент ИЛИ 4. Следовательно, при формировании на элементе 1 последнего импульса серии, на выходе элемента 5 (на шине 11) формируется отрицательный импульс, длительность которого равна длительности...
Предыдущий патент: Устройство для программного управления -фазным шаговым двигателем
Следующий патент: Устройство для контроля параметров срабатывания электромагнита
Случайный патент: Аппарат для деэмульсации нефти