Система автоматического управления потенциально опасным объектом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик н 11970314(23) Приоритет Опубликовано 3010,82. Бюллетень М 9 40Дата опубликования описания 30.10.82 1 И М. Кл.з С 05 В 11/01 Государственный комитет СССР по делам изобретений и открытий(,54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫМ ОБЪЕКТОМ Изобретение относится к автоматическому управлению и защите потенциально опасных объектов и может быть использовано в химической и горно- химической промышленностях, например, при обжиге датолитовой руды.Известна система автоматического поиска, содержащая модулятор, приемник, датчики, усилитель-преобразователь, блок управляющих токов и управляемый по частоте генератор прямоугольных колебаний. Поиск в такой системе ведется путем последовательного перебора всех возможных значений регулируемого параметра до момента попадания в определенную область11.Недостатком данной системы является большая длительность поиска, обус.- ловленная случайностью выборки или длительноотью перебора всех возможных значений регулируемого параметра.Известна также система автоматической защиты потенциально опасного процесса, содержащая измерители сигналов рассогласования, входы которых соединены с измерительными преобразователями и блоками задающих устройств, а выходы измерителей сигналов рассогласования подключены к входам узла. управляющих воздействий, выходы которого соединены с исполнительными механизмами. Сигналы от измерительныхпреобразователей поступают на измерители сигналов рассогласования. Одновременно с этим на измерители сигналов рассогласования поступают допустимые значения параметров процесса от задающих устройств. Если ка, кой-нибудь параметр оказывается больше или меньше) своего допустимогозначения, то с соответствующего измерителя сигнала рассогласования поступает сигнал в узел управляющих 15воздействий, сигналы с которого подают к объекту управления через соответствующие исполнительные меха"низмы 2.Недостаток указанной системысостоит в невозможности управленияобъектом в соответствии с выбраннойфункцией цели, поскольку в системеотсутствует вычислитель функции цели, рассчитывающий значение функции 25 цели по значениям регулируемого ивнешних параметров.Наиболее близкой к предлагаеиойявляется система автоматического управления, содержащая последователь но соединенные первый измеритель.5 10 5 20 25 30 65 блок 20 подстройки и блок 21 защиты. рассогласования, формирователь сигнала управления, выход которого соединен с входом объекта управлениявыход которого соединен с первымвходом первого измерителя рассогла"сования и через датчик регулируемойвеличины - с входами вычислителяфункции цели и вычислителей минимального и максимального значений функции цели, причем выходы источникаопорного сигнала соединены с соответствующими входами ключа, выходкоторого через интегратор соединенс вторым входом первого измерителярассогласования, первый и второй управляющие входы ключа соединены состветственно через второй и третий измерители рассогласования с выходами вычислителей ,допустимых максимального и минимального значенийфункций цели, выход вычислителя функции цели соединен с вторыми входами второго и третьего измерителейрассогласования3. При вводе функции цели от регулйруемой величины в определенную об-. ласть регулируемая величина может оказаться больше (или меньше) аварийного значения, так как в системе отсутствует контроль отклонения регулируемой величины от заданного порогового значения и коррекция скорости изменения сигнала задания регулятору в зависимости от значения этого отклонения. Кроме того, система характеризуется низкой точностью, так как иэ-за инерционности основного контура управления возможно удержание функции цели только в широкой области и невозможна стабилизация значений функции цели.Целью изобретения является повышение точности и надежности системы за счет предотвращения выхоца регулируемой величины за аварийное зна; чение и ограничения скорости изменения и значений сигнала задания регуляторуПоставленная цель достигается тем, что система автоматического управления потенциально опасным объектом, содержащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления, объект управления, выход которого соединен с первым входом первого измерителя рассогласования и через датчик регулируемой величины - с входом вычислителя функции цели, выход которого соединен с пер" вым входом второго измерителя рассогласования, третий измеритель рассогласования и первый ключ, дополнительно содержит четвертый, пятый и шестой измерители рассогласования, блок запоминания заданного значения функции цели, блок запоминания поро 40 45 50 55 60 гового значения, .первый и второй усилители, первый и второй сумматоры, второй ключ, причем второй вход второго измерителя рассогласования соединен с выходом блока запоминания заданного значения Функции цели,а выход через первый усилитель - с первым входом первого сумматора,второй вход которого подключен к выходу датчика регулируемой величины, а также к первому входу третьего измерителя рассогласования, второй вход которого соединен с выходом блока запоминания порогового значения, с первым входом четвертого измерителя рассогласования и с первым входом первого ключа, а выход через второй усилитель - с входом второго сумматора, второй вход которого соединен с выходом первого ключа, свторым входом первого и первым входом пятого измерителя рассогласования; а выход - с первым входом второго ключа, второй вход которого соединен с выходом первого сумматора ивторым входом лятого измерителя рассогласования, а управляющий входс выходом шестого измерителя рассогласования, первый вход которого соединен с выходом второго усилителя,второй вход - с выходом пятого изме-рителя рассогласования, выход второго ключа соединен с вторыми входамипервого ключа и четвертого иэмерителя рассогласованием,выход которого подключен к управляющему входу первого ключа.На фиг. 1 представлена блок-схема фсистемы, на фиг. 2 - пример графиков сигналов регулируемой величины Хзадания регулятору Хэ и скорости изменения сигнала задания Чх во времени для системы без ограничения скорости изменения сигнала задания; на фиг. 3 - пример графиков сигналов Х,Х, 1 Х во времени для предлагаемой системы; на фиг, 4 - пример графиков ограничения скорости изменения сигнала задания Ч и расчетной скорости изменения сигнала задания Чр в зависимости от величины отклонения сигнала регулируемой величины Х от порогового значения Хп для предлагаемой системы.Система включает первый 1, второй 2, третий 3, четвертый 4, пятый 5 и шестой 6 измерители рассогласования, формирователь 7 сигнала управления, объект 8 управления, датчик 9 регулируемой величины, вычислитель 10 функции цели, блок 11 запоминания заданного значения функции цели, блок 12 запоминания порогового значения, первый 13 и второй 14 усилители, первый 15 и второй 18 сумматоры, первый 17.и второй 18 ключи, основной контур 19 управленияНа чертежах также даны сигнал рассогласования 8 , регулируемая величина Хсигнал задания регулятору Х, функция цели Е,внешние возмущения ,6,внешние параметры гу, заданноезначение функции цели Ц сигналрассогласования функции Чели ЬЕсигнал коррекции дХ, расчетная величина сигнала задания регулятору безограничения по скорости измененияХе , расчетная величина сигнала за"дания регулятору с ограничением поскорости изменения Хр , Расчетнаявеличина сигнала задания регулятору Хр, расчетная без ограниченияскорость изменения сигнала заданиярегулятору Ур, расчетная величинаограничения скорости изменения сигнала задания регулятору Ч, пороговое значение регулируемой величиныХп, аварийное значение регулируемойвеличины Х 1, скорость изменения сиг;нала задания М,Алгоритм работы предлагаемой системы описывается следующими соотношениями: х - ч(р)хЪ 1ДАХР при Хп - ХРОХ, при Хп Хр0;Х, при Ч- Ч 0;Р ХО., при Ч- УО;К(ХпУР- ХР- Х,;Хр Х + Чу 1х = х+ьх;1ьх- - г аЕ;К ЬЕ Еъ- Е;Е Е(хг 1)ггде у(р) .- передаточная Функцияосновного контура 19; .К - коэффициент пропорцио 4нальности;К - коэффициент передачи поканалу Х - Е; Ко+ Кл Х + Кя.г + + Кп ФУнк ция цели от регулируемой величины Х и внешних параметров гц.Система работает следующим обра" зом.В основном контуре 19 управления формирователь 7 сигнала управления вырабатывает управляющий сигнал.на объект 8 таким образом, чтобы рас-. согласование Е = Х- Х было минимальным, т,е, основной контур 19 управления отрабатывает изменение сигнала задания регулятору Хри (или) изменение значений внешних возмущений Ф й блоке 20 подстройки вычислитель функции цели по значениям регулируемой величины Х, поступающейс датчика 9, и по значениям внешнихпараметров гц определяет значение функции цели Е . На выходевторого измерителя 2 рассогласованияполучают, сигнал рассогласования Функции 1 цели ьЕ, т,е. величину отклонения функции цели Е от заданного эна чения Е , Для устранения сигналаЬЕ производят коррекцию сигналазадания. Расчетную величину сигналазадания Хр определяют как суммусигналов регулируемой величины Х 15 и сигнала коррекции ьх. ВеличинаЬХ определяет такое значение изменения сигнала Х, при котором изме"нение значения функции цели Е происходит на величину ДЕ. Для этого ;щ сигнал ьЕ усиливают в усилителе 13.при этом коэффициент усиления,усилителя 13 равен 4 К Точность отработки сигнала рассогласования дЕ впредлагаемой системе определяется р 5 только точностью отработки основнымконтуром 19 управления задания Хи точностью расчета в вычислителе 10значений функции цели Е и не зависит от инерционности объекта 8 уп" 3 О равления.Расчитанная величина сигнала задания Хг, поступает в блок 21 защиты, где происходит ограничение скорости изменения расчетной величины 35 сигнала задания. для этого на выходепятого измерителя 5 рассогласованияполучают расчетную без ограниченияскорость изменения сигнала заданиярегулятору УР как разность между . 49 рассчитанным в блоке 20 подстройкизначением сигнала Хр и текущимй значением сигнала задания Х на входев основной контур 19 управления. Рас"четную скорость ф сравнивают на шестом измерителе б рассогласования срасчетной величиной ограничения скорости Ч. Если расчетная скоростьЧ меньше расчетной величины ограРничения скорости Ч, т.е. Ч,- Ур)/О 5 О,(точки с 4,на фиг. 4 , то положительный сигнал с выхода шестого измерителя б,рассогласования поступает на управляющий вход второго ключа18, при этом выход последнего подключают к первому входу второго ключа 18, и на первый вход первого ключа 17 поступает сигнал Хр И наобо"рот, если Ч - Ур 0 (точкис, сэ на. Фиг. 4), то вйход второго ключа 18подключают ко второму входу второго ф ключа 18,и на первый вход первогоключа 17 поступает сигнал Х. Сигнал Хр получают на втором сумматорекак сумму текущего значения сигналазадания Х на входе в основной кон.тур 29 управления с расчетной величи 970314ной ограничения скорости Ч, . Таким образом, скорость изменения сиг-"нала ХР на выходе второго ключа 18не превышает расчетную величину ограничения скорости Ч . Сигнал Чполучают на выходе второго усилителя 14 с коэффициентом усиления Кна который подают сигнал с выходатретьего измерителя 3 рассогласова"ния, где сравнивают сигналы с блока12 запоминания порогового значения 10регулируемой величины и с выходадатчика 9 регулируемой величины.Расчетная величина ограниченияскорости Ч пропорциональна вели;чине разности порогового значениярегулируемой величины Х и значения регулируемой величины Х 1 т.еЧ " К 4 ( Х П- Х ), и чем ближе йаходится значение Х к своему пороговому значению Х, тем меньше становится допустимая величина Чр(Фиг. 4),На первом ключе 17 происходитограничение расчетной величины сигнала задания. Для этого на четвертом измерителе 4 рассогласованиясравнивают пороговое значение Хйс расчетной величиной Хр . Если ХпХрз О, то выходпервого ключа 17подключают к первому входу первого.ключа 17, и в основной контур 19управления поступает сигнал Х график Хна Фиг. 3 йри й б с ). И наоборот, при Х - Хг0 выход первого ключа 17 псдключают к второму входупервого ключа 17, и в основной контур 19 управления поступает сигнал Х(график Х на Фиг. 3 при с ъ й, ) .Ограничение расчетной величинысигнала задания Мр, которое происхоодит на первом ключе 17, необходимодля того, чтобы регулируемая величина Х не превысила аварийное значение Х,. В этом случае (при Х- Хп)хотя и не удается полностью устранитьсигнал рассогласования функции цели 45ЬЕ, регулируемая величина Х не нарушает аварийного значения Мр . Однако выполнение блока 21 защиты безограничения скорости изменения сигнала задания, которое происходит на у)втором ключе 18, не всегда обеспечивает предотвращение нарушения регулируемой величиной Х своего аварийного значения Х Фиг. 2).Это связано с тем, что в моментвремени с = й, когда значениесигнала Х станозится равным значению Х, наблюдается резкий перепадскорости изменения сигнала заданияЧХ (Фиг. 2). При йс хотя сигнал 60задания Х равен пороговому значению )(и, из-за инерционности объекта 8 управления регулируемая величина Х продолжает возрастать и можетпревысить аварийное значение Х Ве роятность нарушения сигналом Х аварийного значения Х тем больше, чембольше перепад скорости ЧХ в точкеДля предотвращения возможных нарушений сигналом Х .аварийного значения )( в блоке 21 защиты предусмотрено ограничение скорости изменениярасчетной величины сигнала задания,которое происходит на втором ключе 18,В этом случае (Фиг. 3) скорость сигнала задания тем меньше, чем ближенаходится регулируемая величина Хот порогового значения Х, н н момент достижения сигналом Х порогового значения Хп перепад скоростисигнала задания Ухравен нулю.П р и м е р. Для технологическогопроцесса обжига датолитовой рудырегулируемой величиной Х являетсятемПература обжига. Основным контуром 19 управления является контуррегулирования температуры обжига путем изменения подачи топлива в прокалочную печь. Функцией цели Е является степень перехода борного ангидрида из одной формы в другую.Внешними параметрами г. ц, влияющими на функцию цели Е , являютсярасход руды в печь и гранулометрический состав руды.Для температуры обжига существуетаварийное значение Хо, превышение которого ведет к нарушению технологического режима (Хо= 960 С) поэтомуНа значение задания регулируемойвеличины Уу наложено ограничение. Ононе должно превышать порогового знафчения Х, (Х = 950 цС ),ФПри изменении расхода руды в печьи (или) изменении гранулометрического состава руды происходит изменениефункции цели. Для устранения отклонения функции цели от заданного значения в блоке подстройки происходитрасчет нового задания регулятору температуры обжига, при котором функцияцели принимает заданное значение.Рассчитанная величина сигнала задания с блока 20 подстройки поступаетв блок 21 защиты, где происходитограничение скорости изменения сигнала .задания и значения сигнала задания, что обеспечивает предотвращение выхода температуры обжига зааварийное значение.Применение предлагаемой системыповышает точность управления в 1,52 раза, позволяет предотвратить выход регулируемой величины за аварийное значение, что повышает производительность оборудования на 5 - 10благодаря предотвращению аварийныхситуаций.Формула изобретенияСистема автоматического управления потенциально. опасным объектом,еэдержащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления, объект управления, выход которого соединен с первым входом первого измерителя рассогласования 5 и через датчик регулируемой величины - с входом вычислителя функции цели, выход которого соединен с пер" вым входом второго измерителя рассогласования, третий измеритель рас О согласования и первый ключ, о т л ич а ю щ а я с я тем, что, с целью повышения точности и надежности, она дополнительно содержит четвертый, пятый и шестой. измерители рас согласования, блок запоминания заданного значения функции цели, блок запоминания порогового значения, ,первый и второй усилители, первый и второй сумматоры, второй ключ, причем второй вход второго иэмерите 4 ля рассогласования соединен с выходом блока запоминания заданного зна" чения функции цели, а выход через первый усилитель - с первым входом первого сумматора, второй вход которого подключен к выходудатчика регулируемой величины, а также к первому входу третьего измерителя рассогласования, второй вход которого соединен с выходом блока запоминания порогового значения, с первым входом четвертого измерителя рассогласования и с первым входом первого ключа, а выход через второй усилитель - с входом второго сумматора, второй вход которого соединен с выходом первого ключа, с вторим входом первого и первым входом пятого измерителей рассогласования, а выход - с первым входом второго ключа, второй вход которого соединен с выходом первого сумматора и вторым входом пятого измерителя рассогласования, а управляющий вход - с выходом шестого измерителя рассогласования., первый вход которого соединен с выходом второго усилителя, второй вход - с выходом пятого измерителя рассогласования, выход второго ключа соединен с вторыми входами первого ключа и четвертого измерителя рассогласования, выход которого под"ключен к управляющему входу первогоключа.источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9 330429, кл. 6 05 В 13/02, 1970.2. Обновленский П.А, Система защиты потенциально опасных процессовхимической технологии. Л., "Химия",1978, с. 26,3. Авторское свидетельство СССР9 557349, кл. 6 05 В 11/01; 1975прототип).970314 филиал ППП Патент",г.Ужгород, Ул.Проектная ВНИИ Тира Закаэ 8387/57 4 Подписное
СмотретьЗаявка
3292922, 13.02.1981
ПРИМОРСКОЕ ОРДЕНА "ЗНАК ПОЧЕТА" ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "БОР" ИМ. 50-ЛЕТИЯ СССР, ЩЕКИНСКИЙ ФИЛИАЛ ОПЫТНО-КОНСТРУКТОРСКОГО БЮРО АВТОМАТИКИ НАУЧНО-ПРОИЗВОДСТВЕННОГО ОБЪЕДИНЕНИЯ "ХИМАВТОМАТИКА"
ЕРЕМЕЕВ ВЛАДИМИР ИВАНОВИЧ, РЯБЦЕВ АНАТОЛИЙ ЕВГЕНЬЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: объектом, опасным, потенциально
Опубликовано: 30.10.1982
Код ссылки
<a href="https://patents.su/8-970314-sistema-avtomaticheskogo-upravleniya-potencialno-opasnym-obektom.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления потенциально опасным объектом</a>
Способ формирования периодического сигнала с заданным значением коэффициента гармоник

Номер патента: 1241145
Опубликовано: 30.06.1986
Авторы: Бухалов, Голубенко, Ковальчук, Костюк
МПК: G01R 23/20
Метки: гармоник, заданным, значением, коэффициента, периодического, сигнала, формирования
...а вторымвходом соединенный с выходом источника 1 синусоидального сигнала и пер 1вым входом блока 7 сравнения по среднеквадратическому значению, второйвход которого соединен с выходоммасштабного преобразователя 4, причемуправляющий вход масштабного преобра- зователя 4 через блок 8 управлениясоединен с выходом блока 7 сравненияпо среднеквадратическому значению.Выход сумматора 6 является выходомустройства,Устройство, реализующее предлагаемый способ, работает следующим образом.Источник 1 синусоидального сигналаформирует синусоидальный сигнал пер-вой гармоники с малым значением коэффициента гармоник (менее 0,001 ).Умножитель 2 частоты формирует синусоидальный сигнал второй гармоники,а затем блок 3 .произвольного искажения (например,...
Формирователь сигнала с заданным значением коэффициента гармоник

Номер патента: 1420543
Опубликовано: 30.08.1988
Авторы: Величко, Голубенко, Костюк, Смирнов
МПК: G01R 23/20
Метки: гармоник, заданным, значением, коэффициента, сигнала, формирователь
...амплитудыв каждой из М формируемых точек сигнала высших гармоник.Значение амплитуды в каждой из М Формируемых точек определяется по математическому выражению: ц = А С.ц з 3.п(272- + с ), :а мгновенное значение амплитуды напряжения в точке М;номер точки дискретизациисигнала высших гармоник;значение амплитуды -йгармоники в сигнале высшихгармоник;начальная фаза -й гармоники;номер гармоники;максимальный номер высшейгармоники в формируемомсигнале высших гармоник;нормирующий множитель, определяемый из математического выражения вида: где ц ц 1-2+К КцегК. = - рГ где ц и ц - среднеквадратичные знаегчения напряжений сигна-,лов высших и первой гармоник соответственно. Генератор 1 синусоидальных сигна.- лов имеет систему стабилизации...
Сигнализатор заданного значения частоты
Номер патента: 1057939
Опубликовано: 30.11.1983
Автор: Заморин
МПК: G06F 7/04
Метки: заданного, значения, сигнализатор, частоты
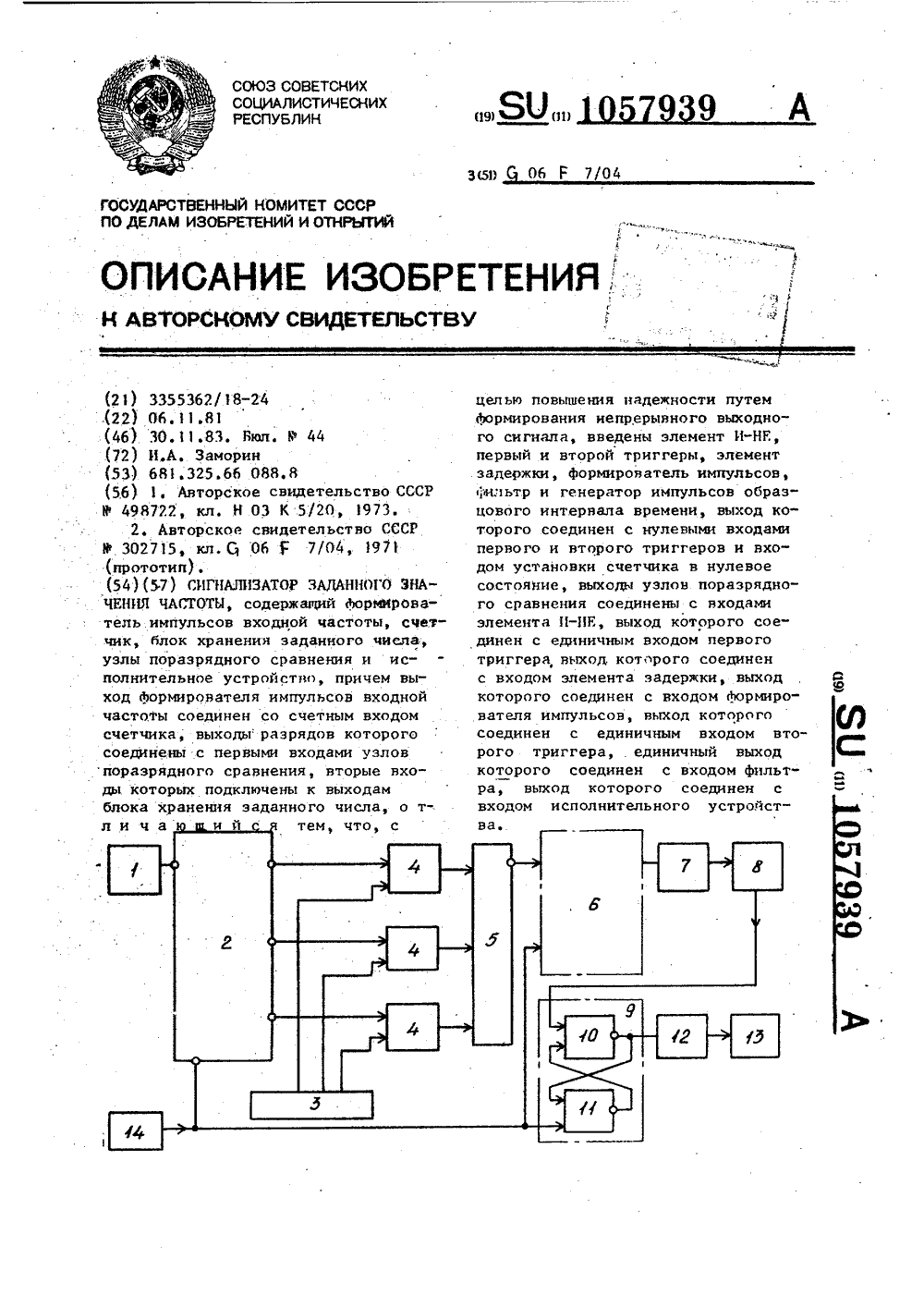
...выходного сигнала, если частота входного сигнала достигла заданного значения,Поставленная цель достигается тем, что в сигнализатор заданного значения частоты, содержащий Аормирователь импульсов входной частоты, счетчик, блок хранения заданного числа, узлы поразрядного сравнения и исполнительное устройство, причем выход Аормирователя импульсов входной частоты соединен со счетным входом счетчика выходы разрядов которого соединены с первыми входами узлов поразрядного сравнения, вторые вхо" ды которых подключены к выходам блока хранения заданного числа, введены элемент И-НЕ, первый и второй триггеры элемент задержки, формирователь импульсов, Фильтр и генератор импульсов образцового интервала времени, выход которого соединен с нулевыми...
Устройство для измерения отклонения сопротивления от заданного значения

Номер патента: 1536322
Опубликовано: 15.01.1990
Авторы: Огирко, Телеп, Шморгун
МПК: G01R 27/02
Метки: заданного, значения, отклонения, сопротивления
...операционного усилителя 32 дифференциальногоусилителя,дрейф третьего операционногоусилителя 33 дифференциального усилителя,сопротивление первого прецизионного резистора 34,сопротивление второго прецизионного резистора 35,сопротивление третьего прецизионного резистора 36,сопротивление четвертого пре.циэионного резистора 37,напряжение смещения. где 30 35 40 К345Кь 45 Псм 50 Напряжение П 1 на первом входе дифференциального усилителя равно К +6) - +Ан Р.(2) 55 где П - напряжение на инвертирующем входе первого операционного усилителя 3,а регистру 28 - выдать на индикаторное устройства 29 число, соответствующее коду, переданному из реверсивного счетчика, Если реверсивный счетчик 27.через ноль не проходил, тоблок индикации знака...
Устройство измерения отклонения сопротивления от заданного значения

Номер патента: 1737360
Опубликовано: 30.05.1992
Авторы: Андреев, Баранов, Ермолаев
МПК: G01R 27/02
Метки: заданного, значения, отклонения, сопротивления
...инвертор 15 и преобразователь код - напряжение (ПКН) 16.Блок 8 цифровой обработки (фиг. 2) содержит счетчик 17, счетчик-дешифратор 18, реверсивный счетчик 19, Т-триггеры 20 - 22, О-триггер 23, логические элементы ЗИ 24 - 26, логический элемент 2 И 27, логический элемент 2 И-НЕ 28,логический элемент 2 ИЛИ 29, логический элемент НЕ 30, триггер Шмитта 31, одновибратор 32 и генератор 33 импульсов,На фиг, 3 позициями обозначены: 34 - сигнал помехи на входе "Сеть" 11; 35 - сигнал на выходе триггера Шмитта 31; 36 - сигнал на входе "Пуск" 10; 37 - сигнал на прямом выходе первого Т-триггера 20; 38 - сигнал на выходе О-триггера 23; 39 - сигнал на выходе логического элемента ЗИ 26; 40 - 43 - сигналы на выходах 1 - 4 счетчика-дешифратора 18...
Предыдущий патент: Устройство для коррекции параметров регулятора
Следующий патент: Бесконтактное переключающее устройство грубого и точного каналов
Случайный патент: 84773