Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1836642
Автор: Артемов
Текст
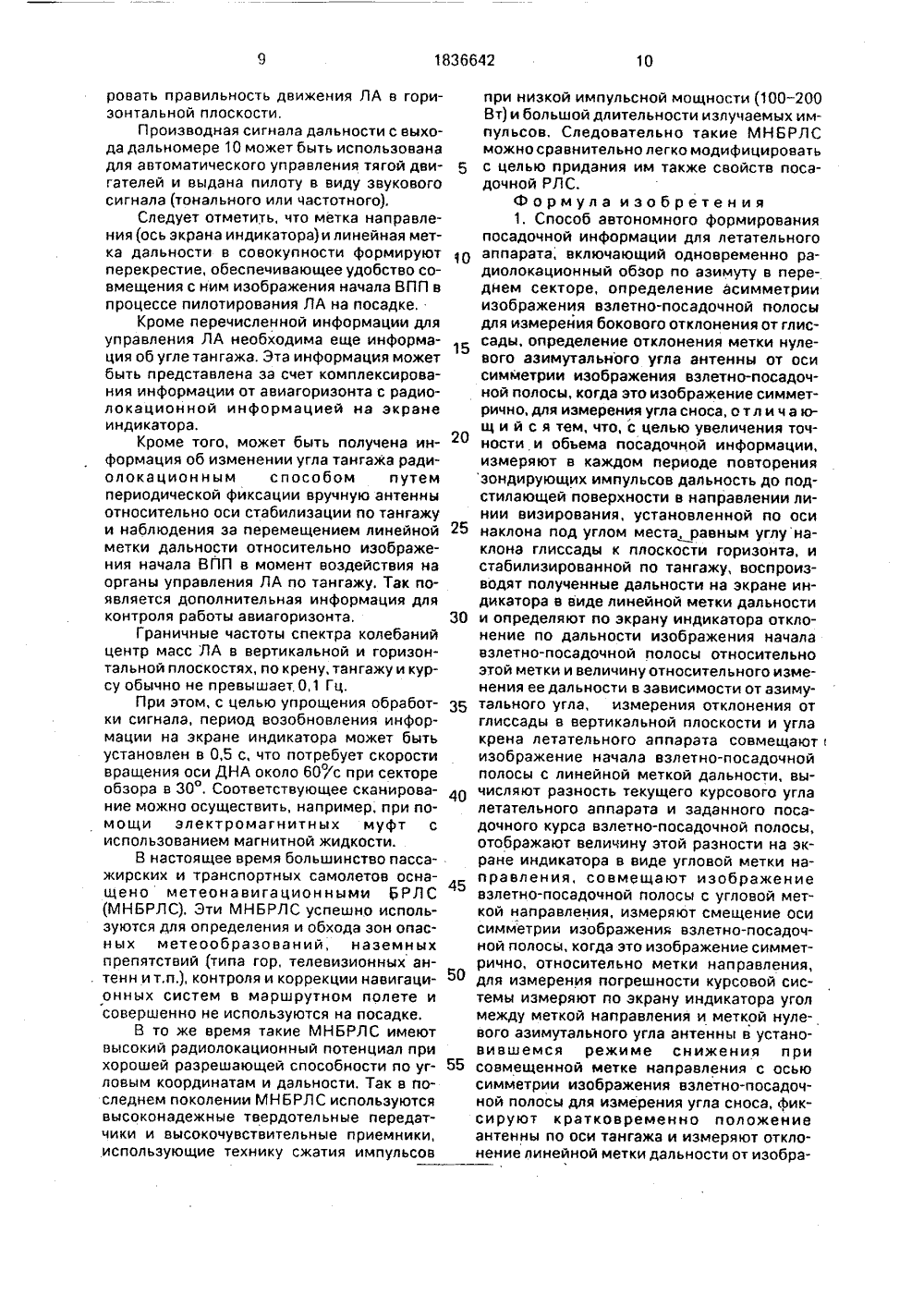
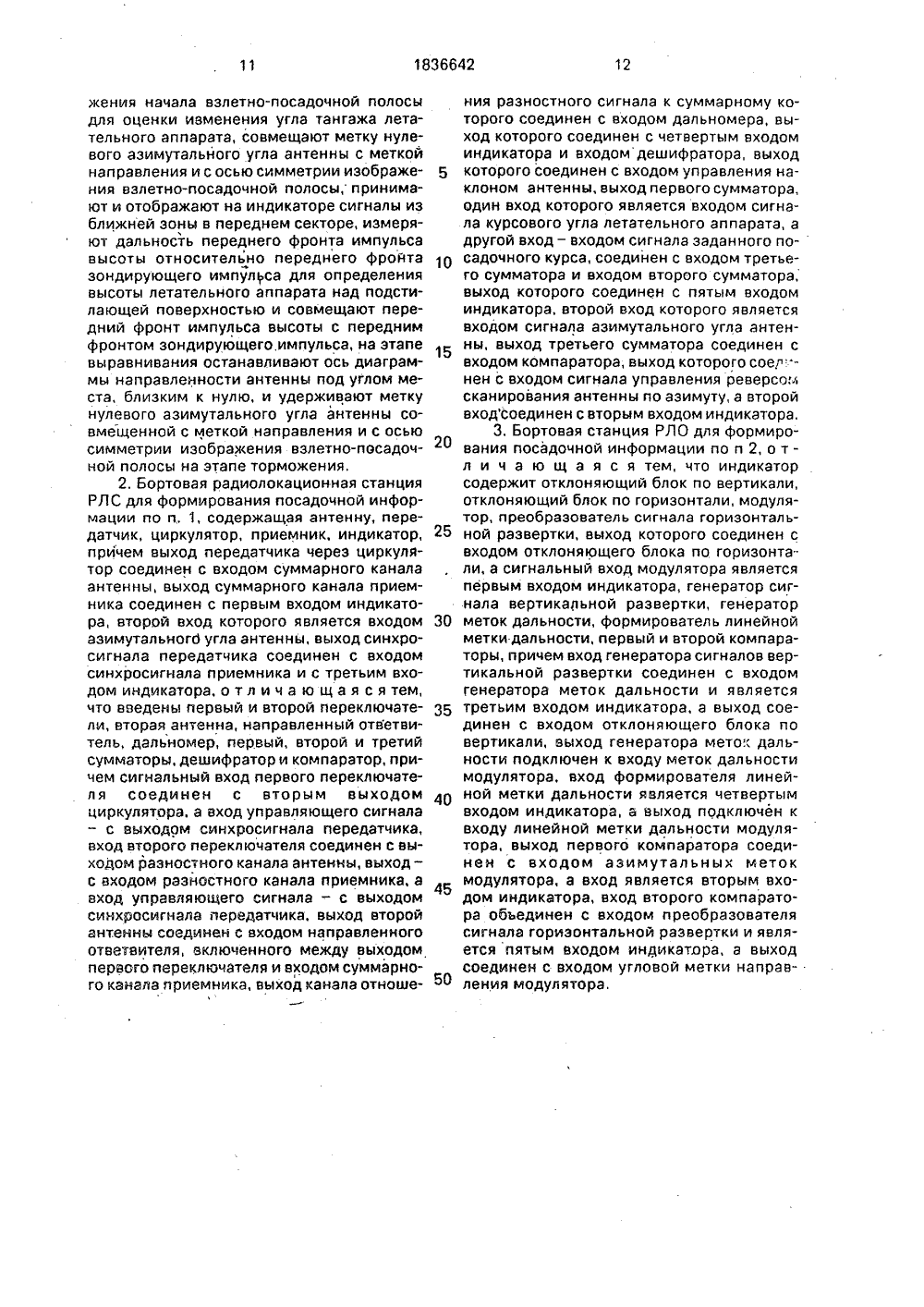
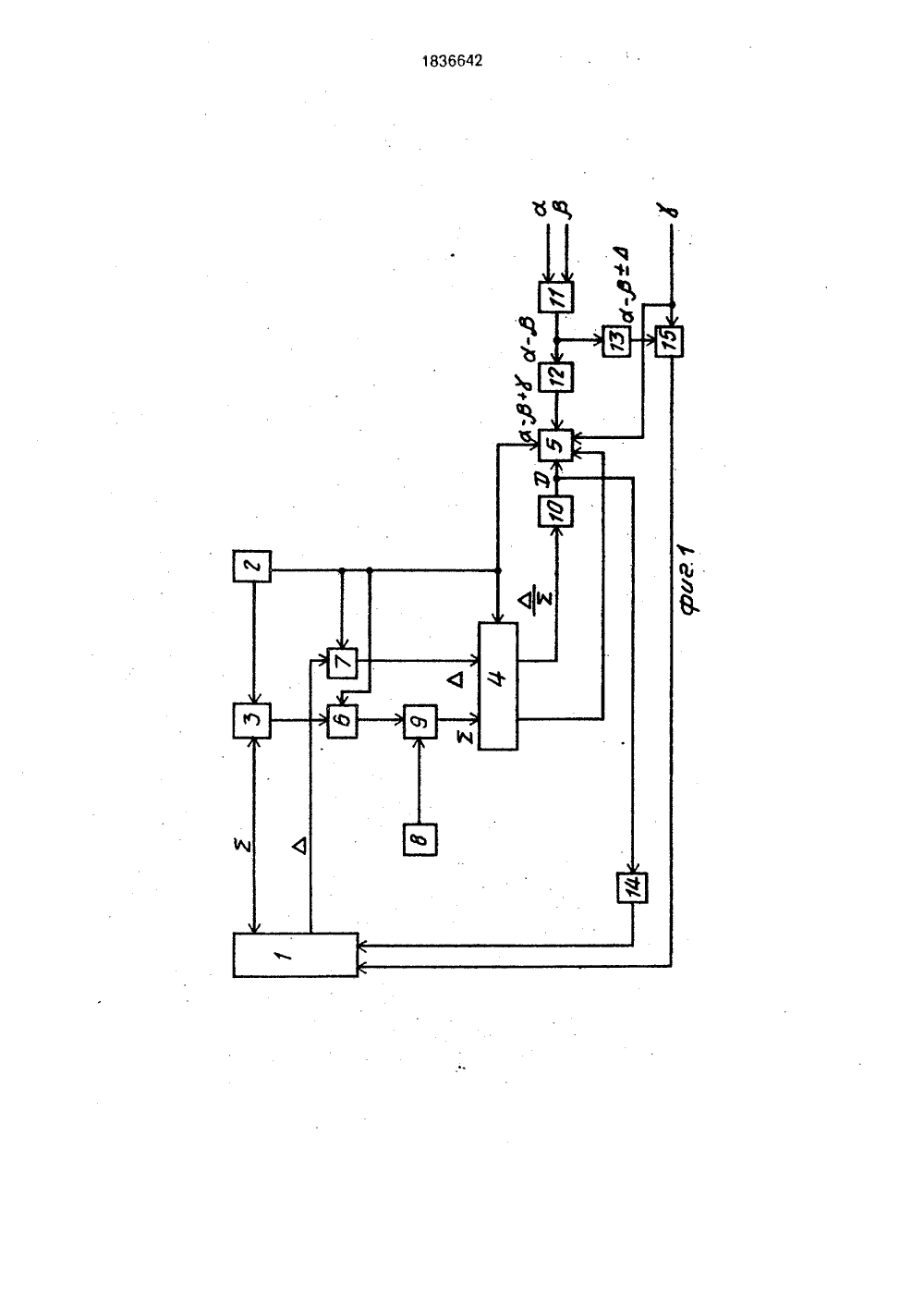
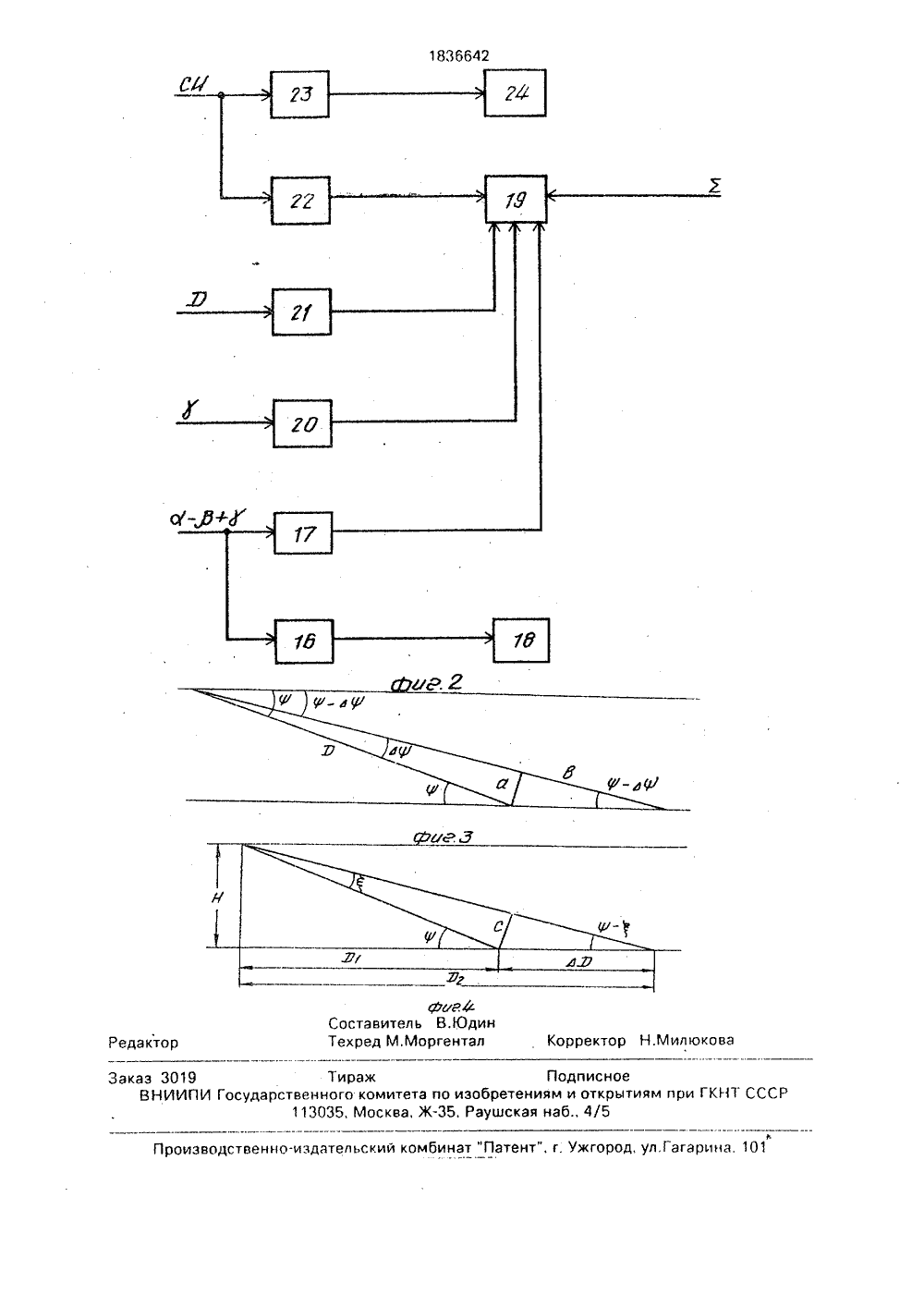
СЭ-Д СОВГ ГСКИХСО 11 ИА ЛИС ГИНЕ СКИРЕ СГ 1 УЬЛИК 3 3 00(5)5 6 ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБРЕТЕН ПАТЕНТ овательский естных Госуний (этап А) лизации ВПП нинград, НПО О ФОРМИРО ФОРМАЦИ Предложенный с ющим образом,Широкополосный ал с выхода переда ор 3 поступает на вх нтенны 1 и излучает ределяемое суммарнособ работает следува де ый сиг- ркулязнала во. опвысокочастотн чика 2 через ц од суммарного ся в пространстой ДНА.(56) Акт по результатам совмдарственных летных испытаопытного образца БРЛС визуа(54) СПОСОБ АВТОНОМНОГВАНИЯ ПОСАДОЧНОЙ ИН Изобретение относится к области управления полетами летательных аппаратов (ЛА) и может быть использовано в системах автономной посадки ЛА, работающих в условиях малой видимости,Цель изобретения - увеличение точности и обьема посадочной информации.На фиг, 1 изображена структурная электрическая схема устройства для автономного формирования посадочной информации; на фиг. 2 - схема индикатора; на фиг. 3, 4 - диаграммы, поясняющие сущность способа,Устройство для автономного формирония посадочной информации (фиг, 1) соржит первую антенну 1, передатчик 2, циркулятор 3, приемник 4, индикатор 5, первый переключатель 6, второй переключатель 7, вторую антенну 8, направленный ответвитель 9, дальномер 10, первый сумма.У 183664 ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (57) Сущность изобретения: устройство для осуществления способа формирования посадочной информации содержит две антенны 1,8, передатчик 2, циркулятор 3, приемник 4, индикатор 5, два переключателя 6, 7, направленный ответвитель 9, дальномер 10, три сумматора 11, 12, 13, дешифратор 14, компаратор 15, 1 - 3-2 - 7 - 4 -10 - 14 - 1-7, 3 - 6 - 9 - 4 - 5, 11 - 12 - 5, 11 - 13 - 15 - 1, 2 - 6, 2 - 5, 1 О - 5, 2 - 4. Дано выполнение индикатора. 2 с, и 1 з,п. ф-лы, 4 ил. тор 11, второй сумматор 12, третий сумматор 13, дешифратор 14, компаратор 15.Индикатор 5 содержит преобразователь 1,6 сигнала горизонтальной развертки, компаратор 17, отклоняющий блок 18 по горизонтали, модулятор 19, второй компаратор 20, генератор 21 меток дальности, формирователь 22 линейной метки дальности, преобразователь 23 сигнала вертикальной развертки, отклоняющий блок 24 по вертикали, 183664240 45 50 55 Л=ЪтдР (1) 6=202 С небольшим упреждением относительно начала высокочастогногоимпульса совторрго выхода передатчика выдается синхроимпульс на управляющие входы первого6 и второго 7 переключателей, для перевода 5их в выключенное состояние, а также входыприемника 4, для запуска схемы. ВАРУ., ин- .дикатора 5, для запуска развертки по дальности и генератора меток дальности,. Отраженные сигналы с выходов суммарного и разностнаго каналов антенны 1начинают поступать на соответствующиевходы приемника 4 только с момента открытия переключателей 6 и 7,Поступление сигналов с выхода антенны 8 через направленный ответвитель 9 навход суммарного канала приемника 4 независит от состояния переключателей 6, 7.Этим обеспечивается работа РЛС в ближней зоне вплоть до нулевой дальности. Приэтом угловое разрешение и сканированиепо азимуту осуществляется за счет передающей антенны 1.Конструктивно антенна 8 может бытьустановлена на неподвижном основании.При этом она должна иметь ДН шириной 25около 100 в вертикальной и 60-80 в горизонтальной плоскостях и соответственнораскрыв в 3-х см диапазоне волн примерно2,5 х 3,5 см. Таким образом обеспечивается работа 30 аппаратуры без мертвой эоны по дальности даже при излучении длинных зондирующих импульсов с частотной модуляцией.В приемнике 4, выполненном, например, по схеме двухканального моноимпульсного приемника на УПЧ с идентичными логарифмическими характеристиками, осуществляется усиление, временная автоматическая регулировка усиления, сжатие сигналов по длительности (если необходимо), определение величины и знака отношения сигнала в разностном канале к сигналу в суммарном, детектирование раздельно по суммарному и разностному каналу;, Если дальнейшая обработка сигналов ведется в цифровом виде, то в состав приемника включаются также аналого-цифровые преобразователи, например, типа "Варса".Сигнал, характеризующий изменение во времени величины отношения сигналов в разностном и суммарном каналах приемника, поступает на вход дальномера 10, где осуществляется измерение дальности расположения заданной величины сигнала, определяемой в зависимости от выбранного направления линии визирования относительно оси ДНА и ее пеленгационной характеристики,Так, если линия визирования совпадает с осью ДНА, установленной по наклону под углом, равным углу наклона глиссады к плоскости горизонта, а ось сканирования антенны по азимуту стабилизирована по тангажу (стабилизация по крену исключена), то измеряется дальность положения сигнала с минимальным значением абсолютной величины отношения.Возможно также одновременное измерение дальности по трем линиям визирования, например, по линии, совпадающей с осью ДНА, линии, лежащей выше оси, и линии, лежащей ниже оси. При этом возникает дополнительная информация, позволяющая оценивать правильность работы системы стабилизации антенны по тангажу,Полученный таким образом сигнал с информацией о дальности пересечения линии визирования с поверхностью аэродрома для каждого периода повторения поступает на четвертый вход индикатора 5, где преобразуется в метку дальности. Совокупность этих меток во всем секторе обзора формирует линейную метку дальности, представляемую на экране индикатора.Сигнал с выхода суммарного канала приемника 4 постулает на первый вход индикатора 5, где осуществляет я ркостную или цветную модуляцию его экрана, формируя тем самым изображение ВПП (в координатах угол азимута - дальность с прямоугольным растром), а также изображения импульса высоты и излучаемого импульса, просачивающегося на вхор, приемника через вторую антенну, Дальность переднего фронта импульса высоты относительно переднего фронта излучаемого импульса является высотой антенны над подстилающей поверхностью.При движении ЛА строго по глиссаде и отсутствии крена линейная метка дальности совмещена с изображением качала ВПП.Наличие вертикального уклонения величиной Е приводит к смещению по дальности линейной метки дальности относительно начала ВПП в соответствующем направлении, равному где ф - угол наклона глиссады и линии визирования(оси ДНА) к плоскости горизонта.Для стандартной глиссады ф = 3, сле- довательно В РЛС с результирующей длительность импульса 0,05 мкс точность измерения дальности может быть не хуже +3 м. Следовательно, точность измерения вертикального уклонения от глиссады в этом методе составит около 0,15 м, 1836642Наличие крена ЛА приводит к изменению угла наклона линии визирования к плоскости горизонта, равному Дф=р РП)(г) где р - угол крена ЛА;у-.азимутальный угол антенны.Это обстоятельство. в свою очередь, приводит к появлению сдвига по дальности 10 положения линейной метки дальности в зависимости от азимутального угла антенны, определяемому формулой(3) 15 Ь="911 Рзц 1 У Полученный сигнал суммы поступает в 45индикаторе 5 (см. фиг, 2) на входы преобразователя сигнала горизонтальной развертки 16, выполненного например, в. видеусилителя мощности, и компаратора 17, выполненного, например, в виде схемы сравнения,Сигнал с выхода преобразователя 16поступает на вход отклоняющей системы погоризонтали 18, а сигнал с выхода компаратора 17 поступает на вход модулятора 19,формируя метку направления в момент равенства нулю сигнала на входе компаратора17, а такжесерию угловых меток в моменты,когда входной сигнал приобретает соответствующие заданные значения,(См, фиг. 3), то есть к перекосу линейной метки дальности относительно изображения начала ВПП или какой-либо метки даль- р ности,Приравнивая (2) к точности измерения дальности + 3 м, из формулы 3 находим, что точность измерения крена для стандартной глиссады ( ф = 3 ) при углах сканирования антенны по азимуту ф 15 и дальности до поверхности аэродрома вдоль линии визирования 100 м составляет 0,1 (при увеличении дальности эта точность возрастает).В первом сумматоре 11 производится вычитание иэ сигнала текущего курсового угла а, поступающего от курсового датчика ЛА на первый вход сумматора, сигнала заданного посадочного курса ВППф, поступающего на второй вход сумматора с пульта управления пилота. 35Полученный сигнал разности поступает далее на входы второго и.третьего сумматоров 12, 13 соответственно.Во втором сумматоре 12 этот сигнал суммируется с сигналом текущего азиму тального угла антенны у, поступающим на второй вход сумматора от датчика азимутального угла антенны. Сигнал азимутального угла антенны поступает в индикаторе на вход компаратора 20, на выходе которого формируется угловая метка нулевого азимутального угла антенны в момент, когда входной сигнал компаратора приобретает нулевое значение,В том случае, если ЛА находится точно в вертикальной плоскости, проходящей через глиссаду, то РЛ изображение ВПП - симметрично относительно осевой линии экрана, а метка нулевого азимутального угла показывает угол разворота продольной оси ЛА относительно заданного посадочного курса. Это утверждение справедливо при отсутствии ошибок в измерении курсового угла ЛА или установке заданного посадочного курса.Если изображение ВПП симметрично относительно любой вертикальной линии экрана индикатора, а эта линия не совпадает с меткой направления (осевой линией экрана индикатора), то это означает, что в курсовой системе или в системе установки заданного посадочного курса существует систематическая ошибка, которая должна быть устранена соответствующим корректором, например, корректором курсовой системы, . путем совмещения метки направления .с осью симметрии изображения ВПП. Такую коррекцию можно осуществлять по любой прямолинейной протяженной цели с известным направлением по азимуту (шоссейная или железная дорога, просека, канал, линия электропередачи и т.п.),При сравнительно узком секторе азимутального сканирования антенны, симметричном относительно продольной оси ЛА и наличии большого угла сноса, возможно отклонение сектора обзора от направления на ВПП.Для устранения этого недостатка сигнал разности текущего курсового угла ЛА и заданного посадочного курса ВПП с выхода первого сумматора подается на вход третьего сумматора, в котором осуществляется раздельно суммирование и вычитание из него значения постоянного угла Л, равного половине сектора сканирования антенны по азимуту,Полученные значения (а - ф)+Ли (а - ф) - Л поступают на первый вход компаратора 15, выполненного, например, на двух схемах сравнения типа "Клапан", на второй вход которого поступает текущее значение аэимутального угла антенны у, В компараторе 15 осуществляется сравнение укаэанных величин со значением у и в моменты совпадения их значений производится формирование и выдача на антенну 1 соответствующих сигналов реверса направления сканирования. Этим обеспечиваетсясимметричное расположение сектора обзора относительно заданного посадочного курса ВПП и, следовательно, относительно оси ВПП (при движении ЛА вблизи плоскости глиссады) независимо от его угловых эволюций,Наличие такой системы слежения сектором сканирования за положением ВПП позволяет сузить до минимальной величины размеры сектора (+ 10 - 15) и получить тем самым приемлемуюскорость возобновления информации даже при механическом сканировании антенны.При достижении ЛАначала участка выравнивания (дальность до начала ВПП 01 на фиг, 4) начинается переход на более пологую траекторию снижения с таким расчетом, чтобы высота пересечения начала ВПП была (10-15 м) равна С.С этой целью осуществляется быстрое уменьшение угла наклона линии визирования к плоскости горизонта, например; изменением угла наклона оси ДНА, на уголс Ьдновременным перенацеливанием этой линии и, следовательно, линейной метки дальности на ориентир,.удаленный от начала ВПП на Ь 0 (см. Фиг. 4). Такой ориентир может быть выполнен, например, в аиде пассивных отражателей, например, уголковых, расставленных вдоль линии, перпендикулярной ВПП, за пределами границ ВПП.Уменьшение угла наклона оси ДНА обеспечивает также увеличение дальности обзора ВПП практически и на всю ее длину даже при сравнительно узкой ДНА в вертикальной плоскости.Для выполнения указанной операции сигнал с выхода дальномера 10 поступает на вход дешифратора 14, выполненного, например, на интегральной микросхеме, на выходе которого появляется и сохраняется до конца посадки и руления сигнал для установки угла наклона антенны на угол ( ф - ) в тот момент, когда сигнал на входе приобретает значение, равное 01.Для стандартной трехградусной глиссады значение 01 можно принять равным 500 м, С равным (10-15 м) (см. фиг. 4). Тогда высота ЛА над плоскостью ВПП в точке начала выравнивания будет равна 26 м, значение ( ф -), равным 1,5 - 1,9 и, следовательно, значение 02 около 700 м, т,е, ориентир для перенацеливания должен отстоять от начала ВПП примерно на 200 м. Максимальная дальность обзора ВПП при этом возрастет примерно да дальности горизонта даже при ширине ДНА в вертикальной плоскости, равной 3,Вблизи начала ВПП для управления ЛА в вертикальной плоскости превалирующее значение приобретает информация о высоте ЛА над подстилающей поверхностью, Ли 10 15 20 25 30 35 40 45 50 55 нейная метка дальности на этом этапе используется в основном для получения информации о крене ЛА.Приемлемая точность измерения высоты может быть получена при длительности импульса на выходе приемника около 0,05 мкс, и высокой крутизне начального участка развертки индикатора по дальности, такой, чтобы участок дальности от 0 до 30 м занимал бы около 40 вертикального размера экрана, при максимальной дальности развертки около 4000 м,Требуемая длительность импульса может быть получена, например, путем использования передатчика, генерирующего частотно модулированный зондирующий импульс длительностью в несколько микросекунд и приемника со сжатием импульса, исполЬзующих современные фильтры формирования и сжатия сигнала, позволяющие осуществлять сжатие излучаемого импульса в 400 раз,Данная БРЛС обеспечивает выработку и представление на экране индикатора в удобном для восприятия пилотом виде следующей информации, необходимой для управления ЛА на посадке: уклонение от глиссады в вертикальной плоскости; высота над подстилающей поверхностью; уклонение от глиссады в горизонтальной плоскости; угол крена; угол сноса и раскаяния; дальность до начала ВПП и ее производная; информация об отсутствии препятствий на ВПП; изменение угла тангажа (периодически),Характер представления данной информации обеспечивает надежный контроль ее достоверности, Появление неисправности в каком-либо элементе БРЛС приводит к резкому изменению изображения на экране индикатора, делая его неприемлемым для использования. Это свойство принципиально отличает данный способ и устройство от существующих систем неавтономной выработки посадочной информации, в которых невозможно обнаружение отказа, приводящего в катастрофе при использовании текущей посадочной информации.Текущая дальность до начала ВПП, дальность переднего фронта импульса высоты (высота над подстилающей поверхностью), положение импульса линейной метки дальности относительно изображения В ПП в совокупности позволяют надежно контролировать правильность движения ЛА в вертикальной плоскости,Отклонение изображения ВПП от метки направления появление при этом асимметрии изображения ВПП и сдвиг метки нулевого азимутального угла антенны (метки оси ЛА) относительно метки направления в совокупности позволяют надежно контроли 1836642 10ровать правильность движения ЛА в горизонтальной плоскости.Производная сигнала дальности с выхода дальномере 10 может быть использована для автоматического управления тягой двигателей и выдана пилоту в виду звуковогосигнала (тонального или частотного).Следует отметить, что метка направления (ось экрана индикатора) и линейная метка дальности в совокупности формируют10перекрестие, обеспечивающее удобство совмещения с ним изображения начала ВПП впроцессе пилотирования ЛА на посадке.Кроме перечисленной информации дляуправления ЛА необходима еще информация об угле тангажа, Эта информация можетбыть представлена за счет комплексирования информации от авиагоризонта с радиолокационной информацией на экранеиндикатора,Кроме того, может быть получена информация об изменении угла тангажа радиолокационным способом путемпериодической фиксации вручную антенныотносительно оси стабилизации по тангажуи наблюдения за перемещением линейной 25метки дальности относительно изображения начала ВПП в момент воздействия наорганы управления ЛА по тангажу, Так появляется дополнительная информация дляконтроля работы авиагоризонта. 30Граничные частоты спектра колебанийцентр масс ЛА в вертикальной и горизонтальной плоскостях, по крену, тангажу и курсу обычно не превышает 0,1 Гц.При этом, с целью упрощения обработки сигнала, период возобновления информации на экране индикатора может бытьустановлен в 0,5 с, что потребует скоростивращения оси ДНА около 60 с при сектореобзора в ЗОО, Соответствующее сканирование можно осуществить, например. при помощи электромагнитных муфт сиспользованием магнитной жидкости.В настоящее время большинство пассажирских и транспортных самолетов оснащено метеонавигационными бРЛС(МНБРЛС), Эти МНБРЛС успешно используются для определения и обхода зон опасных метеообразований, наземныхпрепятствий (типа гор, телевизионных ан. тенн и т.п.), контроля и коррекции навигационных систем в маршрутном полете исовершенно не используются на посадке,В то же время такие МНБРЛС имеютвысокий радиолокационный потенциал прихорошей разрешающей способности по угловым координатам и дальности, Так в последнем поколении МНБРЛС используютсявысоконадежные твердотельные передатчики и высокочувствительные приемники,использующие технику сжатия импульсов при низкой импульсной мощности (100 - 200 Вт) и большой длительности излучаемых импул ьсов. Следовательно такие М Н Б РЛ С можно сравнительно легко модифицировать с целью придания им также свойств посадочной РЛС.Формула изобретения 1. Способ автономного формирования посадочной информации для летательного аппарата, включающий одновременно радиолокационный обзор по азимуту в переднем секторе, определение асимметрии изображения взлетно-посадочной полосы для измерения бокового отклонения от глиссады, определение отклонения метки нулевого азимутального угла антенны от оси симметрии иэображения взлетно-посадочной полосы, когда это изображение симметрично, для измерения угла сноса, о т л и ч а ющ и й с я тем, что, с целью увеличения точности и объема посадочной информации, измеряют в каждом периоде повторения зондирующих импульсов дальность до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, и стабилизированной по тангажу, воспроизводят полученные дальности на экране индикатора в виде линейной метки дальности и определяют по экрану индикатора отклонение по дальности иэображения начала взлетно-посадочной полосы относительно этой метки и величину относительного изменения ее дальности в зависимости от азимутального угла, измерения отклонения от глиссады в вертикальной плоскости и углакрена летательного аппарата совмещаютизображение начала взлетно-посадочной полосы с линейной меткой дальности, вычисляют разность текущего курсового угла летательного аппарата и заданного посадочного курса взлетно-посадочной полосы, отображают величину этой разности на экране индикатора в виде угловой метки направления, совмещают изображение взлетно-посадочной полосы с угловой меткой направления, измеряют смещение оси симметрии изображения взлетно-посадочной полосы, когда это изображение симметрично, относительно метки направления, для измерения погрешности курсовой системы измеряют по экрану индикатора угол между меткой направления и меткой нулевого азимутального угла антенны в установившемся режиме снижения при совмещенной метке направления с осью симметрии изображения взлетно-посадочной полосы для измерения угла сноса, фиксируют кратковременно положение антенны по оси тангажа и измеряют отклонение линейной метки дальности от изобра 1836642 12хения начала взлетно-посадочной полосы для оценки ивменения угла тангажа летательного аппарата, совмещают метку нулевого азимутального угла антенны с меткой направления и с осью симметрии изображения взлетно-посадочной полосы, принимают и отображают на индикаторе сигналы из ближней зоны в переднем секторе, измеряют дальность переднего фронта импульса высоты относительно переднего фройта зондирующего импульса для определения высоты летательного аппарата над подстилающей поверхностью и совмещают передний фронт импульса высоты с передним фронтом зондирующего, импульса, на этапе выравнивания останавливают ось диаграммы направленности антенны под углом места, близким к нулю, и удерживают метку нулевого азимутального угла антенны совмещенной с меткой направления и с осью симметрии изображения взлетно-посадочной полосы на этапе торможения,2. Бортовая радиолокационная станция РЛС для формирования посадочной информации по п 1, содержащая антенну, передатчик, циркулятор, приемник, индикатор, причем выход передатчика через циркулятор соединен с входом суммарного канала антенны, выход суммарного канала приемника соединен с первым входом индикатора, второй вход которого является входом азимутальногб угла антенны, выход синхросигнала передатчика соединен с входом синхросигнала приемника и с третьим входом индикатора, о т л и ч а ю щ а я с я тем, что введены первый и второй переключатели, вторая антенна, направленный ответвитель, дальномер, первый, второй и третий сумматоры, дешифратор и компаратор, причем сигнальный вход первого переключателя соединен с вторым выходом циркулятора, а вход управляющего сигнала - с выходом синхросигнала передатчика, вход второго переключателя соединен с выходом разностного канала антенны, выход - с входом разностного канала приемника, а вход управляющего сигнала - с выходом синхросигнала передатчика, выход второй антенны соединен с входом направленного ответвителя, включенного между выходом первого переключателя и входом суммарного канала приемника, выход канала отноше 5 10 15 20 25 30 35 40 45 50 ния разностного сигнала к суммарному которого соединен с входом дальномера, выход которого соединен с четвертым входом индикатора и входомдешифратора, выход которого соединен с входом управления наклоном антенны, выход первого сумматора, один вход которого является входом сигнала курсового угла летательного аппарата, а другой вход - входом сигнала заданного посадочного курса, соединен с входом третьего сумматора и входом второго сумматора, выход которого соединен с пятым входом индикатора, второй вход которого является входом сигнала азимутального угла антенны, выход третьего сумматора соединен с входом компаратора, выход которого соег нен с входом сигнала управления реверсом сканирования антенны по азимуту, а второй входсоединен с вторым входом индикатора,3, Бортовая станция РЛО для формирования посадочной информации по и 2, о тл и ч а ю щ а я с я тем, что индикатор содержит отклоняющий блок по вертикали, отклоняющий блок по горизонтали, модулятор, преобразователь сигнала горизонтальной развертки, выход которого соединен с входом отклоняющего блока по горизонтали, а сигнальный вход модулятора является первым входом индикатора, генератор сиг.нала вертикальной развертки, генератор меток дальности, формирователь линейной метки дальности, первый и второй компараторы, причем вход генератора сигналов вертикальной развертки соединен с входом генератора меток дальности и является третьим входом индикатора, а выход соединен с входом отклоняющего блока по вертикали, выход генератора меток дальности подключен к входу меток дальности модулятора, вход формирователя линейной метки дальности является четвертым входом индикатора, а выход подключен к входу линейной метки дальности модулятора, выход первого компаратора соединен с входом азимутальных меток модулятора, а вход является вторым входом индикатора, вход второго компаратора объединен с входом преобразователя сигнала горизонтальной развертки и является пятым входом индикатара, а выход соединен с входом угловой метки направления модулятора, 183 б 6421836642 АР.Ф Составитель В.Юдин Техред М,Моргентал орректор Н.Милюков Реда кт Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 10 з 3019 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва,Ж, Раушскэя наб 4/5
СмотретьЗаявка
4925388, 08.04.1991
МОСКОВСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ПРИБОРОСТРОЕНИЯ
АРТЕМОВ ВЛАДИМИР ТАРАСОВИЧ
МПК / Метки
МПК: G01S 13/00
Метки: автономного, аппарата, информации, летательного, посадочной, формирования
Опубликовано: 23.08.1993
Код ссылки
<a href="https://patents.su/8-1836642-sposob-avtonomnogo-formirovaniya-posadochnojj-informacii-dlya-letatelnogo-apparata-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления</a>
Устройство для управления вращением антенны и разверткой электронно-лучевого индикатора

Номер патента: 102019
Опубликовано: 01.01.1955
Автор: Фастовский
МПК: H03J 3/14
Метки: антенны, вращением, индикатора, разверткой, электронно-лучевого
...напряжение У, в одном крайнем положени; сектора качания напряжение с 1, - в противоположном райнсл положении сектора качания. Такая система для любого количеста а кнопок представлена на фиг. ".На фиг. 2 показано, что кроме ыотенциометра П, вращаемого от вигятел 5 Л 4, имеются два ряда посгсдоватсльно соединенных сопрогвОный, подк.поченных к противо Оло 5 сиэ 1яжи,ям потепщоъетра 11. Ооа ряда сопротивлений имео отвствления, присоединенные к кнопочному переключателю К. Ня 1777 НОданО НанряТКЕНИЕ Е 1 оОт СтабИЛИЗИ званного источника постоянного ЯПРЯЖЕНИ 51.На фиг. 2 и 3 ответвления и выво:ы ооознячепы одинаковымп буквя- и, например, 2 в, Зг, е, ж и т. д. Сопротивления выбираются н рассчитываются таким образом, чтобы при;побой...
Устройство для бесконтактного измерения угла наклона электропроводящей поверхности

Номер патента: 527589
Опубликовано: 05.09.1976
Авторы: Арбузов, Васильев, Карпов, Лазарев, Оржельский, Уринюк
МПК: G01B 7/30
Метки: бесконтактного, наклона, поверхности, угла, электропроводящей
...наклона электропроводяшей поверхности содержит генератор 1, токовихревой преобразователь 2, схему обработки сигнала,выполненную в виде усилителей 3,4 с фазочувствительными блоками 5,6, и индикатор 7.Токовихревой преобразователь содержитвозбуждающую катушку 8 и две индикаторные катушки 9,10 индуктивности. Индикаторная катушка 10 индуктивности расположена ортогонально по отношению к первым двум катушками.Индикатор 7 выполнен в виде осциллографа, к вертикальному и горизонтальному входам которого через фазочувствительные бло-ки 5,6 подключены соответственно выходы индикаторных катушек 9 и 10.Устройство работает следующим образом.В том случае, когда возбуждающая катушка 8 параллельна электропроводяшей пс 10 верхности 11, в индикаторных...
Устройство для измерения скорости и угла рыскания транспортного средства

Номер патента: 1714518
Опубликовано: 23.02.1992
Автор: Бачурин
МПК: G01P 3/64
Метки: рыскания, скорости, средства, транспортного, угла
...возможных значенийбазы О".25 Устройство работает следующим образом.С началом измерений производятся замыкание управляемых ключей 11 и сбростриггеров 37 блока 10 в нулевое состояние,30 для чего на их вторые входы с помощьюдвухпозиционного переключателя 18 подается напряжение от источника сигнала начальной установки 19, Затем переключатель18 переводится во второе положение, соот 35 ветствующее замыканию выхода элементаИЛИ 17 с вторым входом ключей 11,При движении транспортного средствав условиях наличия угла рыскания р междунаправлением (скоростью) движения и мер 40 ной базой(вертикально-продольной плоскостью) неоднородность поверхности дорогификсируется сначала гп-м первым датчиком1 (3) и затем соседними к нему первымидатчиками, а через...
Устройство для измерения вольтсекундного интеграла запаса на коммутацию тиристоров

Номер патента: 748711
Опубликовано: 15.07.1980
Авторы: Горин, Сенаторов, Страмнов
МПК: H02M 1/00
Метки: вольтсекундного, запаса, интеграла, коммутацию, тиристоров
...обычных диодов. Кроме того, нафиг.1 введены следующие обозначения:6 - сглаживающий реактор; 7 - преобразователь частоты и числа фаэ;8 - двигатель,25При работе двигателя выпремленноезначение напряжения на входе и выходе ПЧФ - Ч(, и ЧД - имеет форму,представленную на фиг.2 а и 2 б. Этикривые отличаются друг от друга, каквидно иэ фиг.2 в, где эти. кривые совмещены, на величину заштрихованнойпйощади, которая и представляетсобой вольт-секундный интеграл запаса на коммутации ( в дайном случаепреобразователя числа фаэ и частоты - 35ПЧФ). Угол коммутации здесьобозначенр. Во избежание йедопустимого вра-боте двигателяопрокидывания инвертора угол погасания с (угол запаса на коммутацию) должен бытЬ боль Оше нуля.Выходы зыпряиительных схем...
Устройство для обучения оператора грузоподъемной машины

Номер патента: 1188777
Опубликовано: 30.10.1985
Авторы: Гофман, Клюкин, Колодный, Шарыбин
МПК: G09B 9/04
Метки: грузоподъемной, обучения, оператора
...и через один из входов элемента И, одним и другим входами соответственно вычислителями сил натяжения, выходы которых являются выходами блока, и элементов моделирования сил натяжения, выходы которых соединены с дру гими входами элементов И, а вторые и третьи входы - с выходами вычислителей сил натяжения и генераторов строчной и кадровой разверток,Г - сила натяжения каната;1 - длина каната.Блок 7 моделирования положения канатов лебедок (фиг, 2) содержит задатчик 9 положения конца стрел и веса груза, представляющий собой блок переменных резисторов, формирователи 10 и 11 сигналов, пропорциональных траектории движения груза, элемент 12 И, формирователи 13 и 14 сигналов положения канатов, элемент 15 ИЛИ. Формирователи 10 и 11 формируют...
Предыдущий патент: Сигнализатор виброускорений
Следующий патент: Люминесцентный дозиметр для индивидуальной дозиметрии ионизирующего излучения
Случайный патент: Устройство для чистки вагонеток от прилипших частиц породы, угля