Система управления заслонкой плотины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
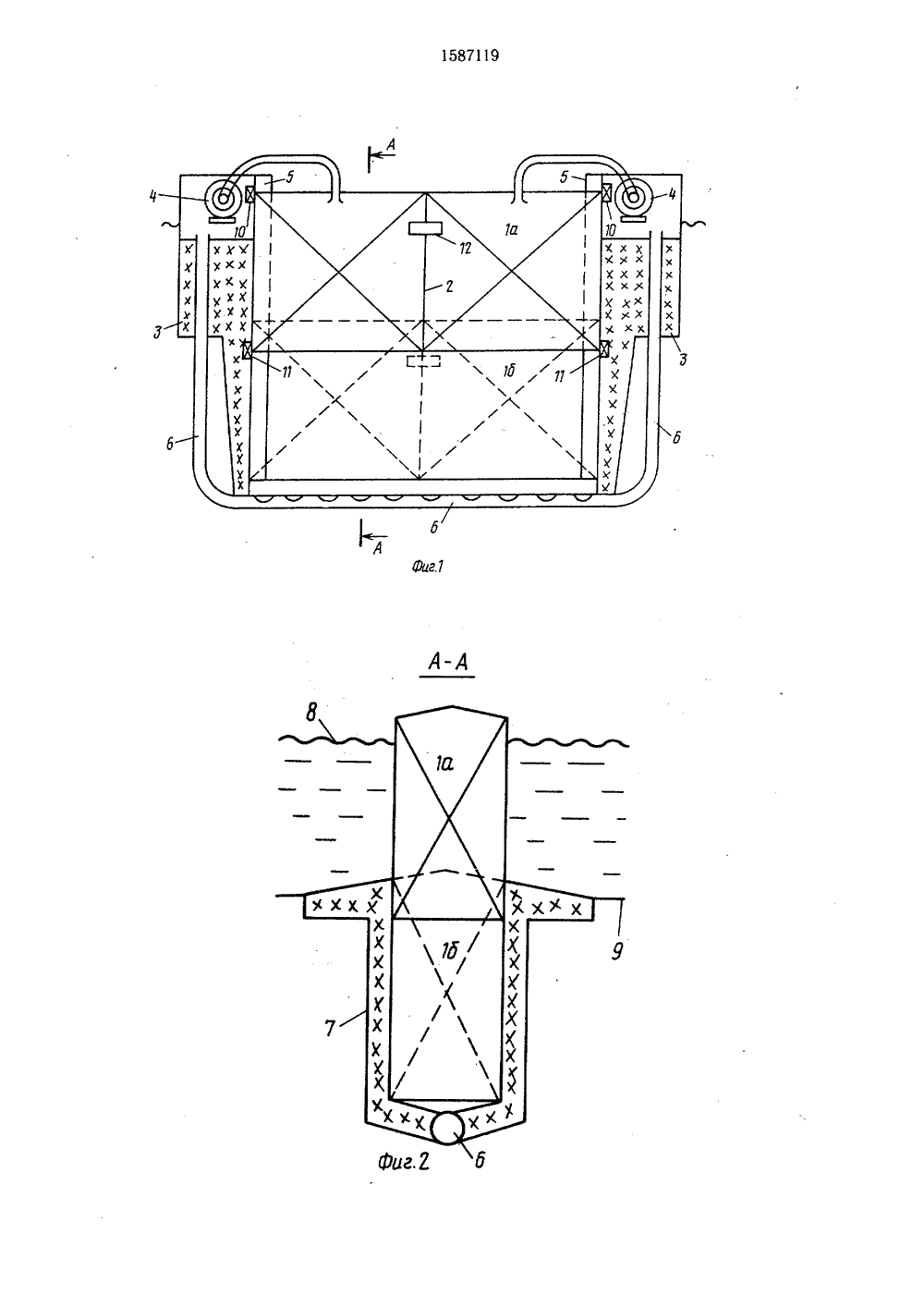
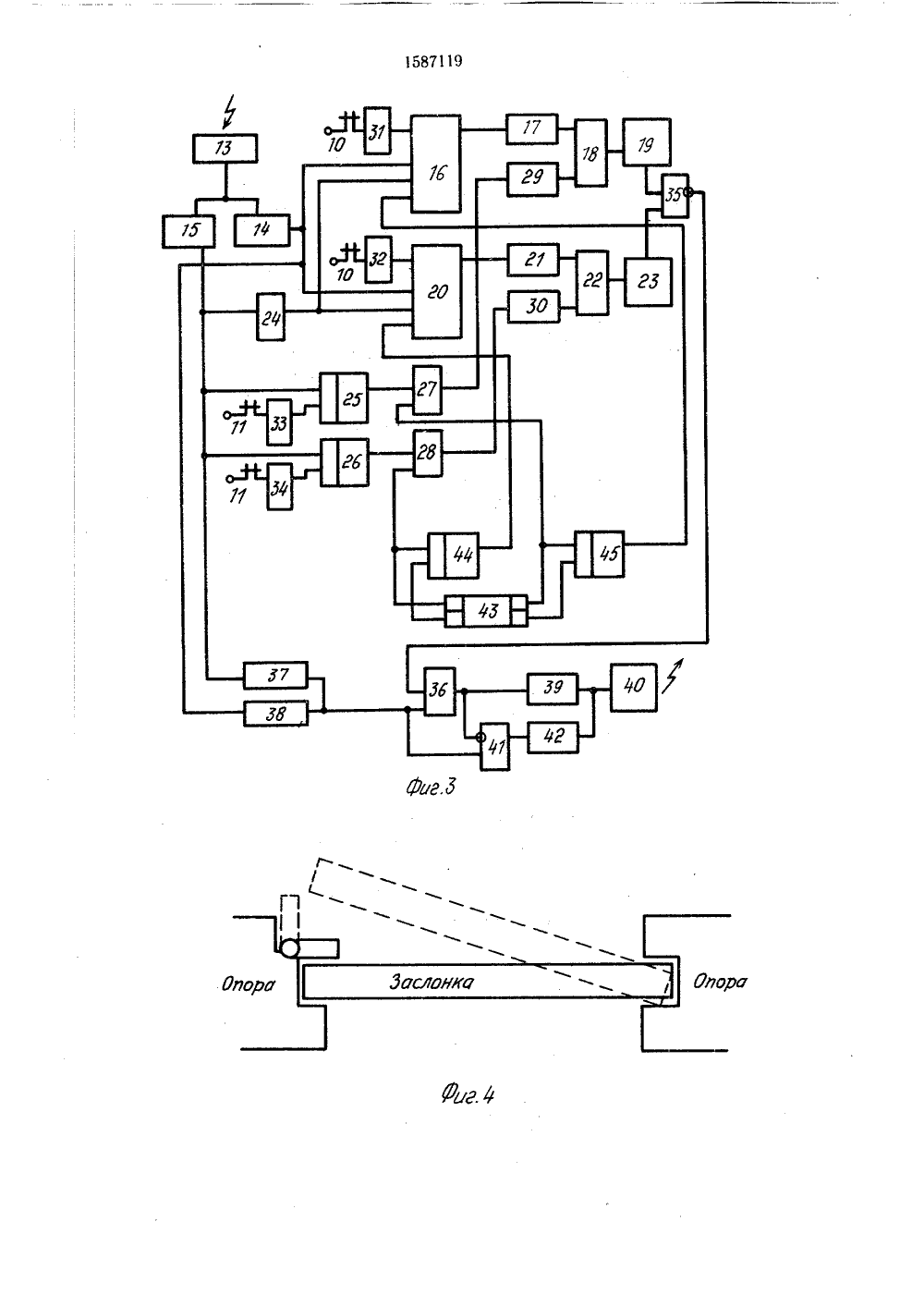
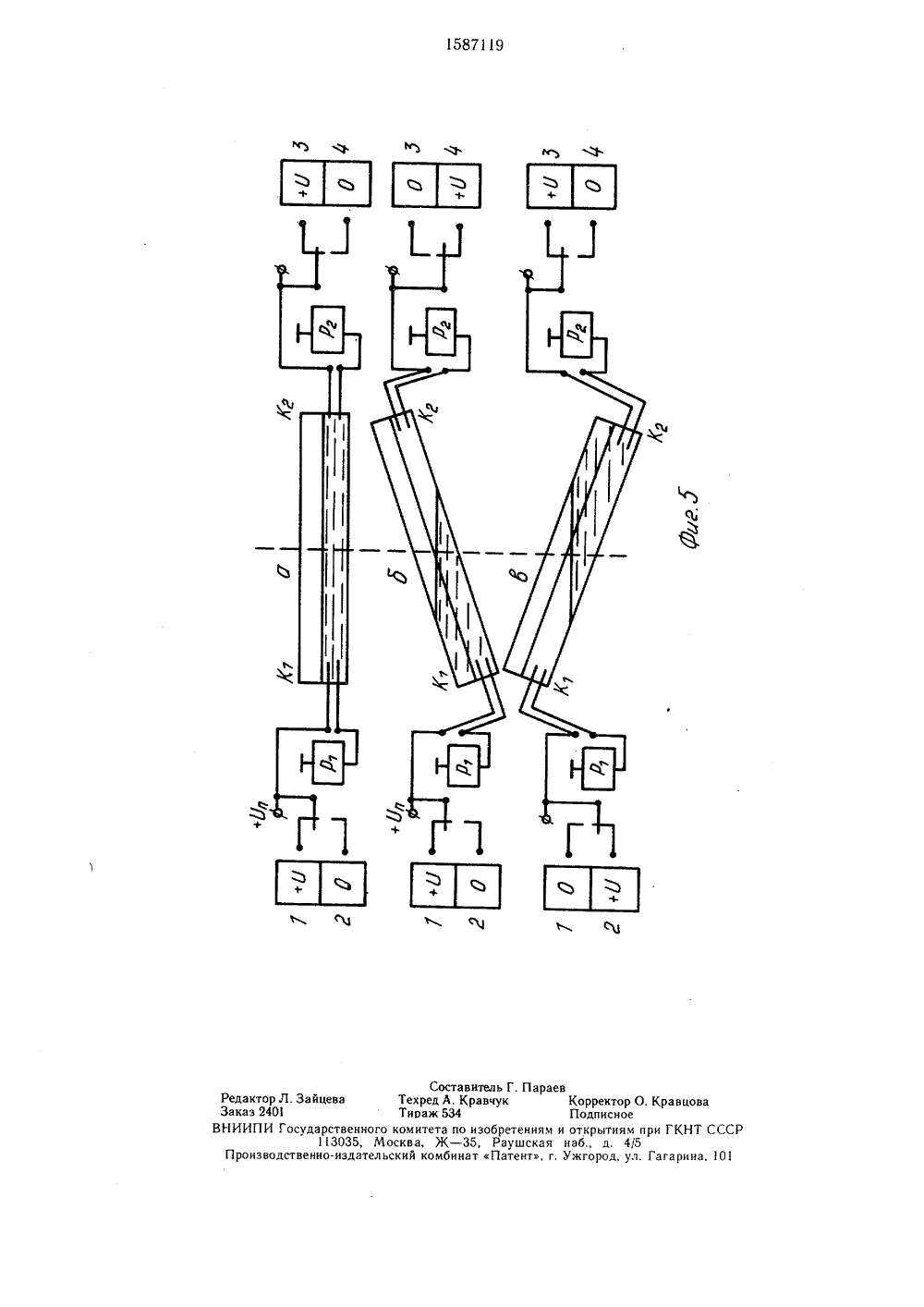
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 119) (111 А 1)5 Е 02 В 7 50 ь ЗОБРЕТЕ Пи ЕТЕЛЬСТ АВТОРСКОМУ информатики и ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР(71) Ленинградский институтавтоматизации АН СССР(54) СИСТЕМА УПРАВЛЕНИЯ ЗАСЛОНКОй ПЛОТИНЫ(57) Изобретение относится к сельскохозяйственному водоснабжению и может быть использовано при создании плотин с автоматическим дистанционным управлением положением их заслонок. Цель изобретения - повышение качества и надежность управлениязаслонкой плотины. Система управления заслонкой плотины включает устройство дистанционного управления исполнительным механизмом заслонки, выполненным в видепневмонасосов подачи сжатого воздуха в правую и левую герметичные полости заслонки, датчика ее горизонтального положения идатчиков ее крайнего верхнего и крайнего Изобретение относится к использованию наземных гидросооружений в сельском хозяйстве и может быть использовано при создании плотин в каналах и водоемах, предназначенных для различных целей, в том числе для борьбы с наводнениями.Цель изобретения - повышение качества и надежности управления.На фиг. 1 показана конструкция системы управления заслонкой; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - блочная принципиальная электрическая схема устройства дистанционного управления исполнительного механизма заслонки; на фиг. 4 - конструкция направляющих опор, вид сверху; на фиг. 5 - процесс срабатывания датчика горизонтального положения заслонки. нижнего положении и направляющих опор, в которых перемещается заслонка. Устройство дистанционного управления имеет в своем составе приемник команд с диспетчерского пункта и передающее устройство, а также датчики вращения электроприводов пневмонасосов, триггеры и логические схемы И, НЕ, 2 ИЛИ-НЕ и ИМПЛИКАЦИЯ. Подъем и опускание заслонки производится без дополнительных механических воздействий на опоры путем нагнетания в полость заслонки воздуха с помощью пневмонасосов н вытеснения воды, а опускание путем откачки воздуха и затопления полости заслонки водой. Это позволяет исключить специальные механические устройства опускания и подъема заслонки и удержания ее над поверхностью воды при открытых воротах плотиы. Разделение внутренней полости заслоню правую и левую половины позволяет г 1;1 анить перекосы заслонки при ее пс 1 и мецении. Это достигается убавлением или доба- кой количества воздуха, подаваемого в соответствующую правую или левую полости заслонки. 1 з.п.ф-лы, 5 ил. Система управления заслонкой 1, разделенной подземной перегородкой 2 на две герметичные полости, включает опоры 3, на которых установлены пневмонасосы 4, Опоры снабжены направляющими 5 и гидросистемой 6 откачки ила из ниши 7 по боковым поверхностям и дну направляющих. Верхняя кромка заслонки в поднятом состоянии расположена выше уровня 8 воды в водоеме, а в опущенном состоянии - на уровне 9 дна водоема. Система управления снабжена также концевыми верхними 10 и нижними 11 выключателями, установленными на левой и правой направляющих, а также датчиком 12 горизонтального положения заслонки. Ниша 7 является продолжением направляющих опор, в которую помещаетсязаслонка в опущенном положении. Заслонка изготавливается полой и герметичной, путем подачи в нее соответствующего количества воздуха ей сбеспечивается положительная плавучесть, что существенно облегчает доставку (с помощью буксиоа), установку и выполнение послелуюгцих ремонтных работ, Установка заслонки производится на плаву путем буксировки завеления ее в направлявшие обеих опор и закрытия одной из направляющих поворотом одной из створок на угол 90 (фиг. 4).Устройство дистанционного угравления исполнительным механизмом заслонки (фиг. 2) вклюцает приемник 13 команд управления, подключенный к децгифратору 14 подъема и дешифратору 15 опускания заслонки. Выход дсиифратора 4 польема и.рез первую схеку И 16 и реле 17 накачки левой полости соединен с электроприводом 18 цеверсивного пневмонасоса (не показан), на валу которого установлен латчик 19 вращения. Аналогично для правой полости заслонки к тому же выходу дешифратора подъема подключены вторая схема Р 1 20., реле 21 накачки правой полости, электропривод 22 и датчик 23 вращения. К выходу дешифратора 15 опускания через схему НЕ 24 подключены вторье входы первой 6 и второй 20 схем И, а также счетные входы первого 25 и второго 26 триггеров, выходы которых соединены с входами третьей 27 и четвертой 28 схем И. Выходы последних связаны с реверсивньми электроприодами 18 и 22 ссответстевно для левой и правой полостей через реле 29 и 30 откачки из левой и правой полостей заслонки. Третьи входы первой и второй схем И соединены с концевыми вьклюцателями 10 датчиков верхнего положения левой и правой полостей заслонок через инверторы 3 и 32. Концевые ьключатели 11 нижнего положения полостей заслонки полклюцены к вбросным холам первого 25 и второго 26 триггеров соответственно через инверторы 33 и 34.Выходы датчиков 9 и 23 вращения через схему 2 1 ЛЛИ-НЕ 35 подключены к первому входу пятсй схемы И 36, второй вход которой через схему 37 задержки соединен с выхолом дешифратора опускания, а церез схему 38 задержки - с выходом дешифратора подьема. Выход пятой схемы И 36 через первый шифратор 39 соединен с входом переда ющего устройства 40, Параллельно этой цепи вклюцена схема ИМП.гИКА ИЯ 4 и второй шифратор 42, причем второй вход схемы ИМПЛИКАЦИЯ 41;оединен с вторым входом пятой схемы И 36.Первые два противофазных выхода датчика 43 горизонтального положения заслонки подключены к вторым входам третьей 27 и цетвертой 28 схем И, а также к счетным вхолам третьего 44 и четвертого 45 триггеров. Обнуляющие входы этих триггеров подключены к вторым двум противофазным выхо 50 55 ки времени, равного задержке, осуществляемой схемои 38 задержки, один из двигателей или оба продолжают работать, что свидетельствует о том, что заслонка не поднялась до верхнего положения, логическая единица после схемы задержки 38 поступает на вход схем ИМПЛИКАЦИЯ 41, где в случае отсутствия на первом входе схемы РМПЛИКАЦИЯ 41 логической единицы дам датчика 43, а выходы триггеров 44 и 43 - к четвертым входам первой 16 и вто; рой 20 схем И.Работает система управления заслон кой плотины следующим образом.Принятая по радиолинии приемником13 команд команда расшифровывается в дешифраторах 14 и 15. В случае получения команды на подъем заслонки дешифратор 1014 подъема вырабатывает на своем выходе логическую единицу, которая подается на вход первой и второй схем И 16 и 20. Вырабатываемая этими схемами И команда обеспечивает включение реле 17 и 21, которые осуществляют подачу электропитания на дви гатели электроприводов 18 и 22 пневмонасосок левого и правого отсеков заслонки на нагнетание в них воздуха. Датчики 19 и 23 воащения двигателей начинают с момента включения двигателей вырабатывать логические единицы на своих выходах, которые поступают на блок ИЛИ-НЕ 35, на входе которого вырабатывается нуль как при работающих обоих двигателях, так и при работе одного из них. Заслонка поднимается до тех пор, пока своим левым и правым плечами не 25 разомкнет оба концевых выключателя 10своего верхнего положения. Б этот момент нули, вырабатываемые кнверторами 32 и 31, переводят схемы И 16 и 20 в противоположные состояния, реле 17 и 21 отключают питание от двигателей приводов пневмонасоЗ 0 сов подачи воздуха в отсеки, заслонкаостанавливается, датчики 19 и 23 вращения вырабатывают на своих выходах нули, которые, попав на зход элемента 2 ИЛИ-НЕ 35, вырабатывают на его выходе логическую единицу, которая поступает на первый вход пя той схемы И 36. Одновременно на вход схемы И 36 поступает от дешифратора, 14 польема единица, задержанная в схеме 38 задержки на время подъема заслонки из нижнего в верхнее положение. Приправильной 40 отработке команды на подъем заслонки послеее фиксации в верхнем положении и отключения обоих двигателей пневмонасосов с выхода пятой схемы И 36 логическая единица поступает на вход первого шифратора 39, который выдает сигнал на подъем заслон ки на передающее устройство 40. Одновременно логическая единица поступает на первый вход схемы ИМПЛИКАЦИЯ 41 и не пропускает логический сигнал на включение второго шифратора 42,Если после отведенного на подъем заслон 158711940 45 50 55 сформируется на выходе логическая единица, которая включает второй шифратор 42 и сформирует сигнал Команда не выполнена, Эта команда и будет передана передающим устройством 40 на пункт управления плотиной.При получении команды приемным устройством на опускание заслонки срабатывает дешифратор 15 опускания заслонки, вырабатывает логическую единицу на своем выходе, которая через элемент НЕ 24 попадает на вход первой и второй схем И 16 и 20 и выключает пневмонасосы, если они в этот момент работали на подъем заслонки. Кроме того, эта же логическая единица подается на входы первого и второго триггеров 25 и 26, которые при отсутствии команды от концевых выключателей 11 нижнего положения обеих полостей заслонки пропускают логическую единицу на свои выходы, которая, пройдя третью и четвертую схемы И 27 и 28, включает реле 29 и 30, которые подают электро. гание на двигатели электроприводов для откачки воздуха из левой и правой полостей заслонки. Заслонка опускается по своим направляющим в нишу, т. е, тонет под тяжестью поступившей в заслонку воды, срабатывают концевые выключатели 11 нижнего положения заслонки, на входах инверторов 33 и 34 появляются нули, которые поступают на вторые сбросные входы триггеров 25 и 26, они перебрасываются в противоположное состояние, а выработанные ими нули отключают через третью и четвертую схемы И 27 и 28 реле 29 и 30 включения двигателей пневмонасоса. Датчики 19 и 23 вращения вырабатывают на своих выходах нули, которые, попав на входы элемента 2 ИЛИ-НЕ 35, вырабатывают на его выходе логическую единицу, которая поступает на первый вход пятой схемы И 36. Одновременно задержанная на время опускания заслонки в схеме задержки 37 логическая единица поступает на второй вход пятой схемы ИМПЛИКАЦИЯ 41.Далее схемы 24 и 41, шифраторы 39 и 42, передающее устройство 40 срабатывают аналогично описанному, т. е., если за время, отведенное на опускание заслонки, она опустится - будет передан сигнал Команда исполнена, а в случае, если к моменту окончания времени, отведенного на опускание заслонки, она не будет опущена (т. е. не сработают концевые выключатели датчиков 11, свидетельствующие о фиксации заслонки в нижнем положении, и двигатели будут продолжать работать, в этом случае будет передан сигнал Команда не выполнена.Датчик 43 горизонтального положения заслонки, третий 44 и четвертый 45 триггеры и схемы И 27, 28 предназначены для поддержания заслонки в горизонтальном положении ее подъеме или опускании путем 5 10 15 20 25 30 35 отключения соответствующего насоса левого или правого отсека заслонки до момента фиксации Горизонтальное положение. На фиг. 5 продемонстрирован принцип работы датчика горизонтального положения.В горизонтальном положении реле левого отсека Р датчика 43 и реле правого отсека Р датчика 43 горизонтального положения заслонки включены через контакты К и К, так как заполненная до середины емкость, например, ртутью, обеспечивает замыкание этих контактов, Через соответственно замкнутые контакты появления крена одно из реле выключается. Так, на фиг. 5 б при занижении левого отсека обесточивается реле Рг и напряжение появляется на выходе 4 вместо выхода 3 или на выходе 2 вместо выхода 1 (в случае занижения правого отсека заслонки).Если, например, при подъеме заслонки правая часть заслонки поднимается быстрее, напряжения на выходе 3 и 4 датчика горизонтального положения поменяются и станет на выходе 3 - нуль, а на выходе 4 - логическая единица, Это изменение переводит четвертый триггер 45 (фиг. 3) в противоположное состояние и на его выходе появляется нуль, который, поступив на вход первой схемы И 16, вызывает отключение пневмонасоса 4 правой полости заслонки, работающего на нагнетание воздуха. Первый пневмонасос продолжает работать и в тот момент, когда заслонка принимает горизонтальное положение, значение напряжений на третьем и четвертом выходах датчика 43 изменяется на первоначальное (на выходе 3 датчика - единица, на выходе 4 - нуль), триггер 45 возвращается также в первоначальное положение и пневмонасос правого отсека заслонки включается для совместной работы с левым пневмонасосом для дальнейшего подъема заслонки. При опускании заслонки, например, при аналогичном перекосе заслонки появившийся нуль на третьем выходе датчика 43 поступает на вход третьей схемы И 27, что меняет логическую единицу на выходе этой схемы на нуль. В результате реле 29 обесточивает электропривод и пневмонасос перестает откачивать воздух из левого отсека заслонки. Продолжающий работать электро- привод 22 с помощью его пневмонасоса продолжает откачивать воздух из правого отсека, его обесточивает выравнивание заслонки, что приводит к изменению напряжения на выходах 3 и 4 датчика в первоначальное состояние, после чего оба насоса продолжают откачивать воздух, обеспечивая равномерное опускание заслонки, Таким образом, наличие датчика горизонтального положения исключает возможность перекоса и заклинивания заслонки в направляющих, т. е. осуществляется постоянное поддержание за 1587119слонки в горизонтальном положении при подъеме и спуске заслонки. Кроме того, в процессе автоматического дистанционного управления по радио положением заслонки осуществляется индикация на пункте управления выполнения или невыполнения команд подъема и опускания заслонки.Высота подъема заслонки выбирается с целью обеспечения превышения верхней кромкой заслонки максимально возможного подъема уровня 8 воды с любой стороны от ворот.В опущенном положении заслонки при нахождении ее в нише обеспечивается беспрепятственный проход плавсредств через ворота плотины над заслонкой.Возможное засорение ниши 7 песком или илом устраняется регулярным (дежурным) подъемом заслонки, удалением со дна, ниши ила или песка с помощью специальной гидро- системы 6 прокачки в нижней части ниши и конструкцией заслонки, которая в крайнем верхнем положении не выдвигается полностью из ниши, а в крайнем нижнем положении верхний край заслонки не опускается ниже верхней части ниши.Эффективность применения предлагаемой системы управления заслонкой плотины состоит в обеспечении судоходства при открытой плотине, в резком снижении требований к механической прочности опор за счет исключения вертикального давления заслонки на опоры при ее перемещении и зависании в любом положении, а также в существенном уменьшении энергетических затрат на подъем и опускание заслонки, так как электроэнергия тратится только на подачу воздуха во внутренние полости заслонки, а уже воздух обеспечивает подъемную силу для удержания и подъема заслонки. Снижение требований к механической прочности опор благодаря плавучести заслонки приводит к снижению затрат на создание плотины и ее эксплуатации. Исключение возможных случаев заклинивания заслонки при подъеме и опускании обеспечивается системой автоматического поддержания заслонки в горизонтальном положении благодаря введению датчика горизонтального положения и разделению заслонки на два одинаковых отсека. Автоматическое дистанционное управление положением заслонки позволяет одновременно управлять несколькими плотинами с единого пульта управления системой плотин.Формула изобретения1. Система управления заслонкой плотины, включающая заслонку, установленную в направляющих опор и выполненную в виде герметичной полости, электроприводной исполнительный механизм, выход которого соединен с внутренней полостью заслонки, и датчик вертикального положения заслонки,подключенный к усгройству дистанционного управления исполнительным механизмом, отличающаяся тем, что, с целью повышения качества и надежности управления, система 5 снабжена датчиком горизонтального положения заслонки, подключенным к устройству дистанционного управления исполнительным механизмом управления заслонки, выполненной с двумя одинаковыми герметичными полостями, реле накачки и реле откачки каждой из полостеи заслонки, подключенных к четырем входам устройства дистанционного управления исполнительным механизмом, выполненным в виде двух электроприводных реверсивных насосов откачки 15 и накачки воды в соответствующие полостизаслонки, причем датчик вертикального положения заслонки выполнен в виде двух пар концевых выключателей крайнего верхнего и крайнего нижнего положений заслонки, установленных на направляющих опор.2. Система по п. 1, отличающаяся тем, чтоустройство дистанционного управления исполнительным механизмом заслонки выполнено в виде приемника команд управления с подключенными к нему дешифраторами 25 подъема и опускания, выход первого из которых подключен через первую и вторую схемы И к реле накачки каждой из полостей заслонки, а выход второго подключен к счетным входам первого и второго триггеров, а также третьей и четвертой схем И, входы которых подключены к выходам первого и второго триггеров, а выходы - к реле откачки каждой иа полостей заслонки, третьего и четвертого триггеров, счетные входы которых подключены к первой паре противофазных выходов датчика горизонтального полоЗ 5 жения заслонки и к вторым входам третьейи четвертой схем И, а выходы - к вторым входам первой и второй схем И, схемы НЕ, вход которой подключен к дешифратору опускания, а выход - к третьим входам первой и второй схем И, пятой схемы И, первый вход которой подключен через схему 2 ИЛИНЕ к датчикам вращения насосов откачки и накачки, а второй вход через схемы задержки - к дешифраторам опускания и подьема, схемы ИМПЛИКАЦИЯ, входы ко торой подключены к выходу пятой схемы Ии к ее второму входу, и двух шифраторов, выходы которыхподключены к передающему устройству, а входы - к выходу пятой схемы И и к выходу схемы ИМПЛИКАЦИЯ, причем четвертые входы первой и второй 5 О схем И подключены к двум датчикам крайних верхних положений полостей заслонки, обнуляющие входы первого и второго триггеров подключены к двум датчикам крайних нижних положений полостей заслонки, а обнуляющие входы третьего и четвертого триггеров - к второй паре противофазных выходов датчика горизонтального положения заслонки.Г. Парае тениям ушская тент, г Редактор Л. ЗайцеваЗаказ 2401ВНИИПИ Государст1130Производственно-и енного коми 35, Москва, дательский Составителед Л. Кравчуж 534ета по изобЖ - 35, Ромбинат П Корректор О. К Подписное открытиям при аб., д. 4/5Ужгород, ул. Га авцоваГКНТ СССРгарина, 101
СмотретьЗаявка
4492096, 11.10.1988
ЛЕНИНГРАДСКИЙ ИНСТИТУТ ИНФОРМАТИКИ И АВТОМАТИЗАЦИИ АН СССР
ВЕРБИЦКИЙ ИГОРЬ СЕРГЕЕВИЧ, ПАРШАЕВ ВЛАДИМИР ИВАНОВИЧ
МПК / Метки
МПК: E02B 7/50
Опубликовано: 23.08.1990
Код ссылки
<a href="https://patents.su/7-1587119-sistema-upravleniya-zaslonkojj-plotiny.html" target="_blank" rel="follow" title="База патентов СССР">Система управления заслонкой плотины</a>
Биметаллический датчик-реле температуры

Номер патента: 1529311
Опубликовано: 15.12.1989
Авторы: Бочкарников, Буянов, Майсоценко
МПК: H01H 37/40
Метки: биметаллический, датчик-реле, температуры
...воздействуя на толкатель 5, который через контактнуюпружину 11 замыкает контакты 12 и 13.В крайнем верхнем положении толкатель 5 своими выступами упирается вопорную шайбу 6, обеспечивая необходимый контактный зазор, который был установлен в процессе механическои сборки реле,Таким образом, в предложенном устройстве установленный толкатель 5ограничен от перемещения в крайнемверхнем положении опорной шайбой 6,Минимальный контактный зазор обеспечивается величиной нижнего пределадопуска на толкатель 5 и не требуерся производить какую-либо операцийпо установке (регулировке) величиныконтактного зазора.Регулировка температуры срабатывания реле производится вращениемцилиндрического кольца 3 с основанием 2.При этом вершина сферы...
Биметаллический датчик-реле температуры

Номер патента: 1597954
Опубликовано: 07.10.1990
Авторы: Бочкарников, Буянов, Майсоценко
МПК: H01H 37/40
Метки: биметаллический, датчик-реле, температуры
...изгибается, уменьшая свой прогиб. Достигнув температуры прямого срабатывания, биметаллический термочувствительный диск 2 хлопком изменяет направление прогиба. Под действием указанного диска 2 толкатель 13 воздействует через пружину 14 на шток 15 и стакан 9. Стакан 9 толкает контактную пружину 6, замыкая контакты 7 и 8,При понижении температуры биметаллический термочувствительный диск 2 уменьшает свой прогиб и при достижении температуры обратного срабатывания хлоцком возвращается в исходное состояние и освобождает пружину 6, при этом контакты 7 и 8 размыкаются. Регулировка температуры срабатывания реле осуществляется независимо от установки заданного размера контактного зазора.Установка контактного зазора производится до...
Емкостной датчик абсолютных положений

Номер патента: 926534
Опубликовано: 07.05.1982
Автор: Артеменко
МПК: G01D 5/249
Метки: абсолютных, датчик, емкостной, положений
...контуров детекторов и обеспечивают синхронное изменение их резонансных частот при пере 25 мещениях подвижных электродов. Линейная зависимость частот контуров откоординаты перемещения подвижногоэлектрода обеспечивается тем, что вкаждом детекторе начальная емкость С5 О является. эквивалентом емкости плоскопараллельного конденсатора с пластинами по форме треугольника, дополняющего форму и площадь трапецеидальных пластин электрода конденсатора ко 35 дирующего устройства до треугольника.Синхронное смещение вдольоси Гчастот 1 и Г при изменении ко-.ординаты х передатчика означает равное ему смещение частотной характере ристики детектора (фиг. 3),Для обеспечения нормальной работыканалов измерения и схемы автоматического управления датчик...
Устройство для контроля датчиков положения ротора вентильных двигателей

Номер патента: 955399
Опубликовано: 30.08.1982
Авторы: Гандшу, Гращенков, Явдошак
МПК: H02K 29/02
Метки: вентильных, датчиков, двигателей, положения, ротора
...14 измерителявременных интервалов 15, второй вход1 б которого подключен к выходу П-триггера б, Установочные входы 17 и 18П-триггеров 9 и б подключены через45переключатель 19 к выходу одного изразрядов счетчика 4,Устройство работает следующим образом,Приводной двигатель вращает сигнальный элемент контролируемого датчика 1 положения ротора. Сигнал содного из чувствительных элементовс частотой Г поступает на вход 2логического элемента Исключающее ИЛИ3. Если переключатель 11 соединяетвход 10 с потенциальной шиной источника питания, то логический элемент3 работает как инвертор, при этомна командный вход 8 Р-триггера 9 поступает прямой сигнал с чувствительного элемента, а на командный вход 5П-триггера б - инвертированный. Счетчик 4 работает в...
Устройство для измерения скорости течения масла на входе газового реле

Номер патента: 144544
Опубликовано: 01.01.1962
Авторы: Плахотников, Протасов
МПК: G01P 5/02, H01H 35/24
Метки: входе, газового, масла, реле, скорости, течения
...на маслопровод 4 между трансформатором 5 и расширителем б перед газовым реле 7 и фиксирует скорость масла непосредственно на входе в газовое реле 7. Поток масла, возникающий при внутреннем повреждении трансформатора 5 или сквозном коротком замыкании, давит на лопатку 8 датчика 2, благодаря чему поворачивается ось 9, а вместе с ней и поводок 10, толкающий буксирную стрелку 11 измерительного прибора 3. После прекращения броска масла и возвращения датчика 2 под воздействием плоских пружин 12 в исходное положение стрелка остается на том месте, куда ее переместил поводок 10, и показывает на шкале 13 наибольшую скорость масла. Перевод стрелки 11 в исходное положение осуществляется толкателем 14, возвращение которого производится...
Предыдущий патент: Откатные ворота шлюза
Следующий патент: Способ очистки канала от донных и придонных наносов и устройство для его осуществления
Случайный патент: Автоматический питатель башенной машины для производства слюдяных материалов