Способ определения динамических петель гистерезиса ферромагнитных материалов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1497596
Авторы: Аронов, Добровольский, Иванова, Селезнев, Филей
Текст
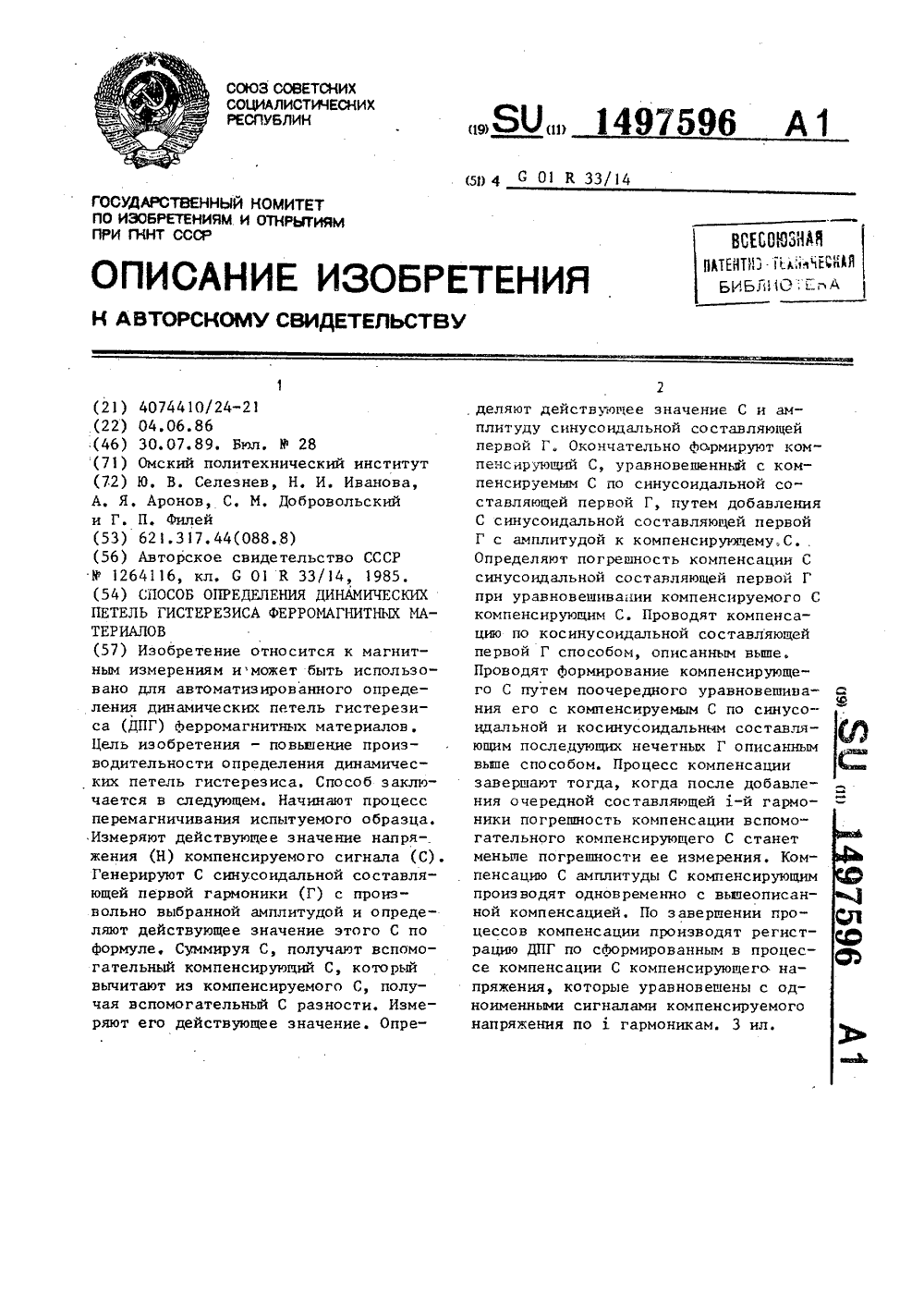
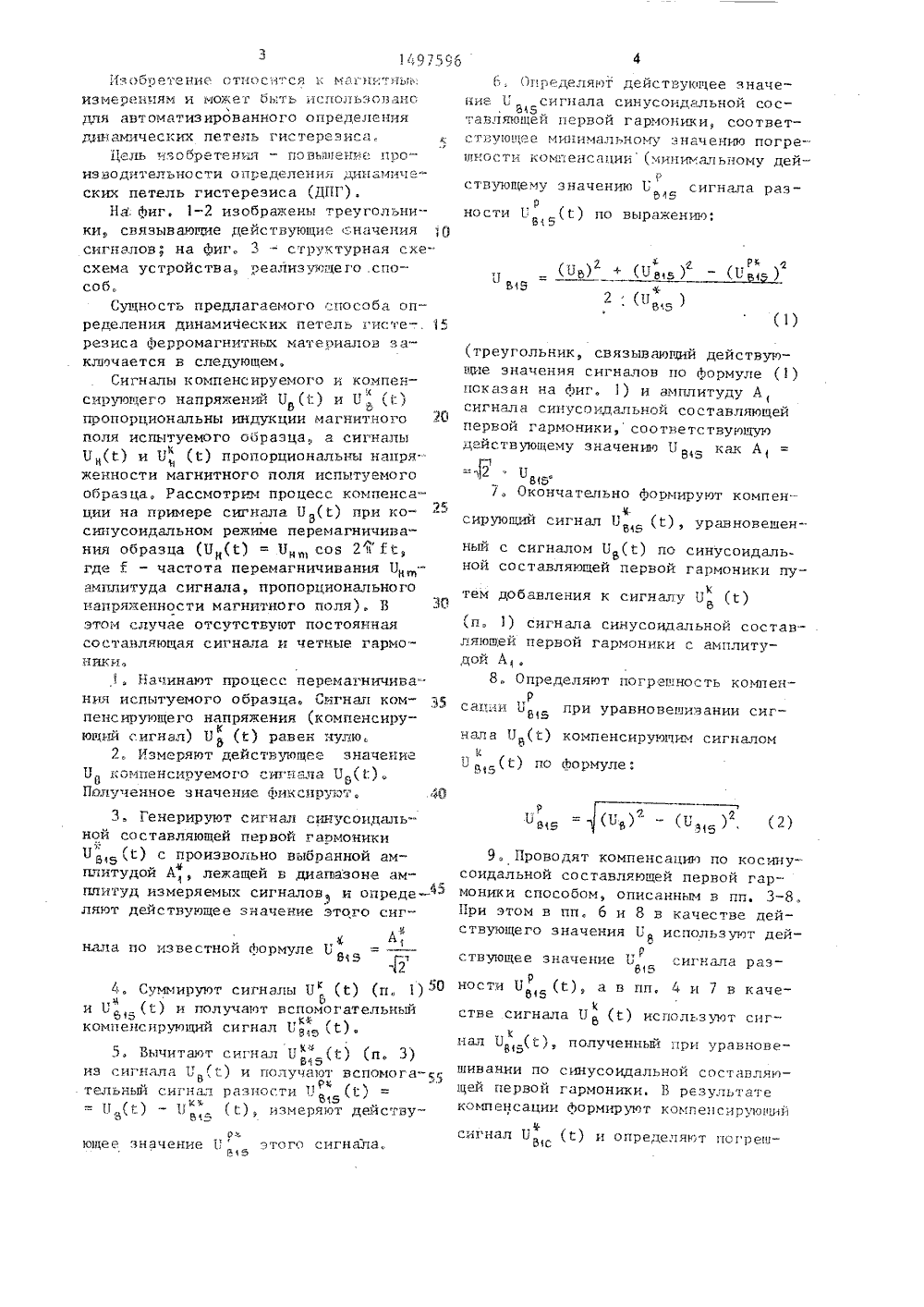
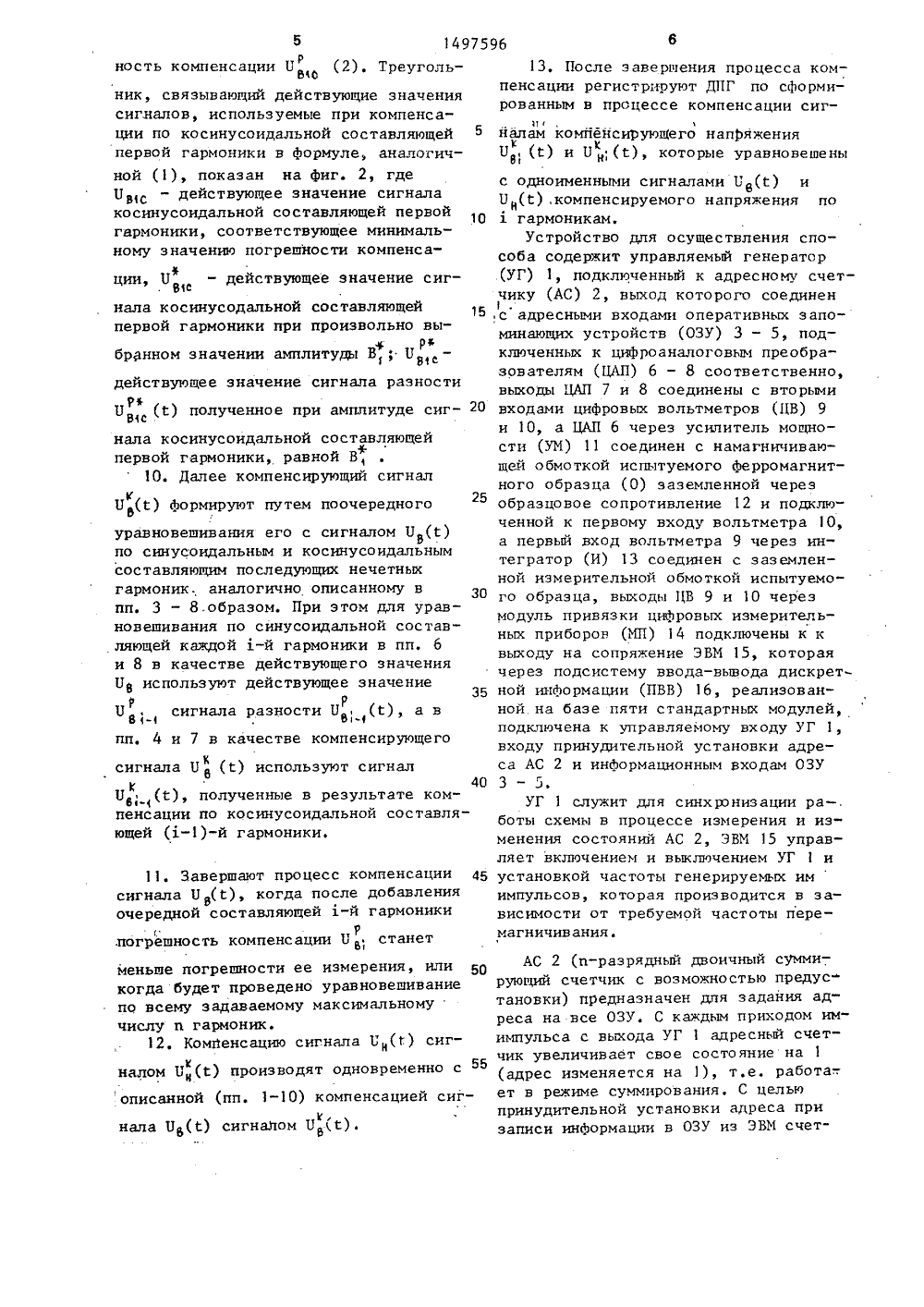
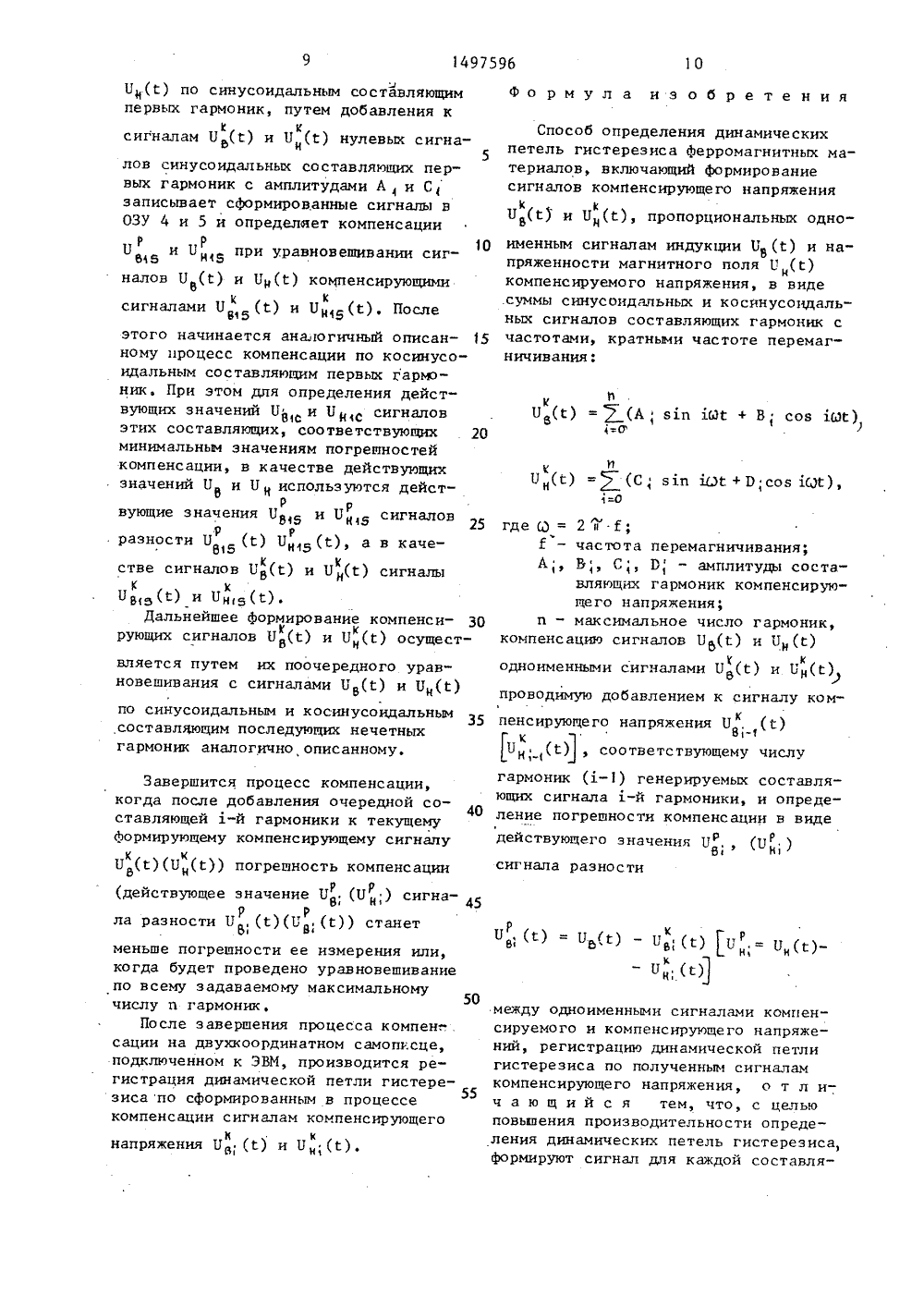
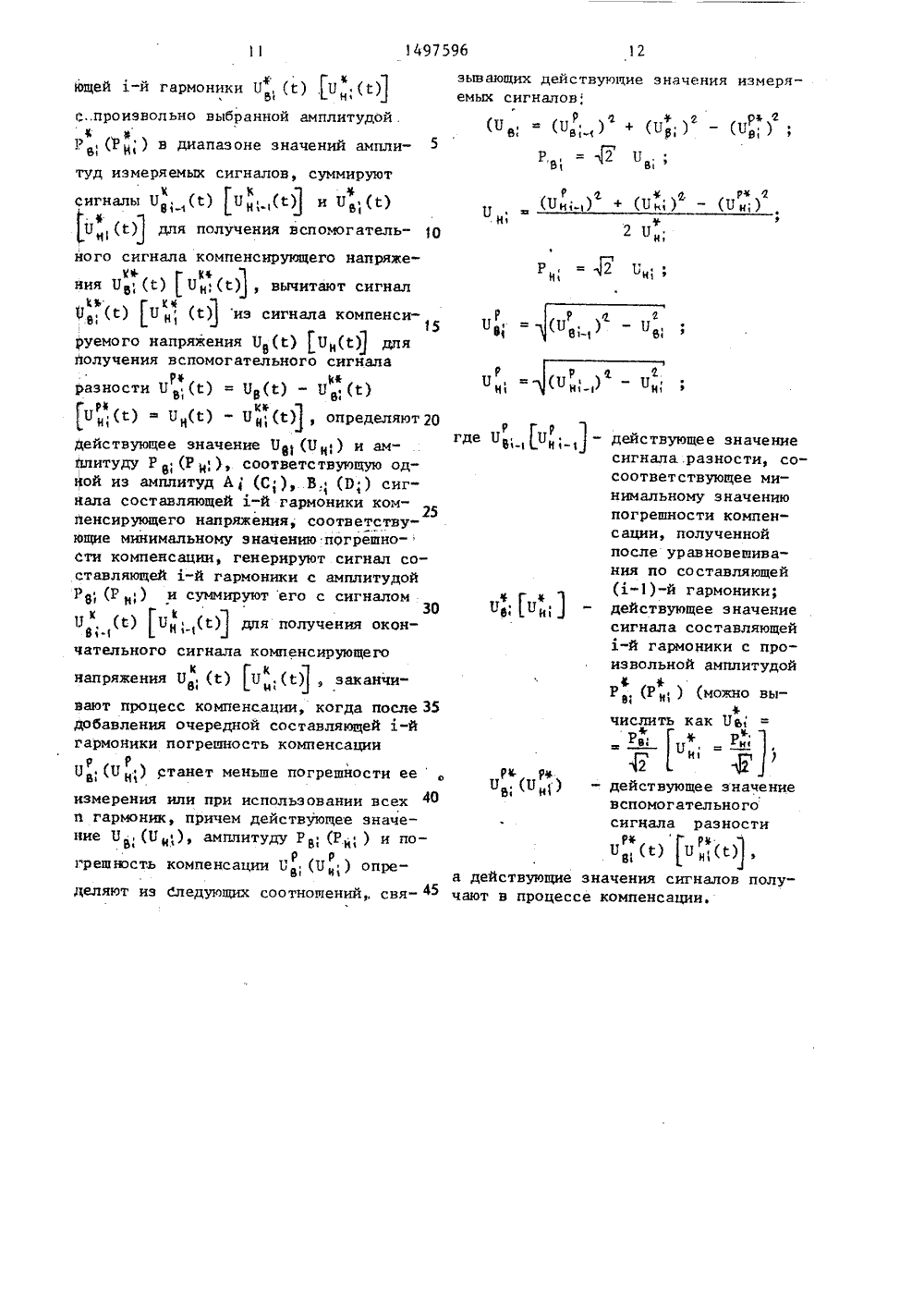
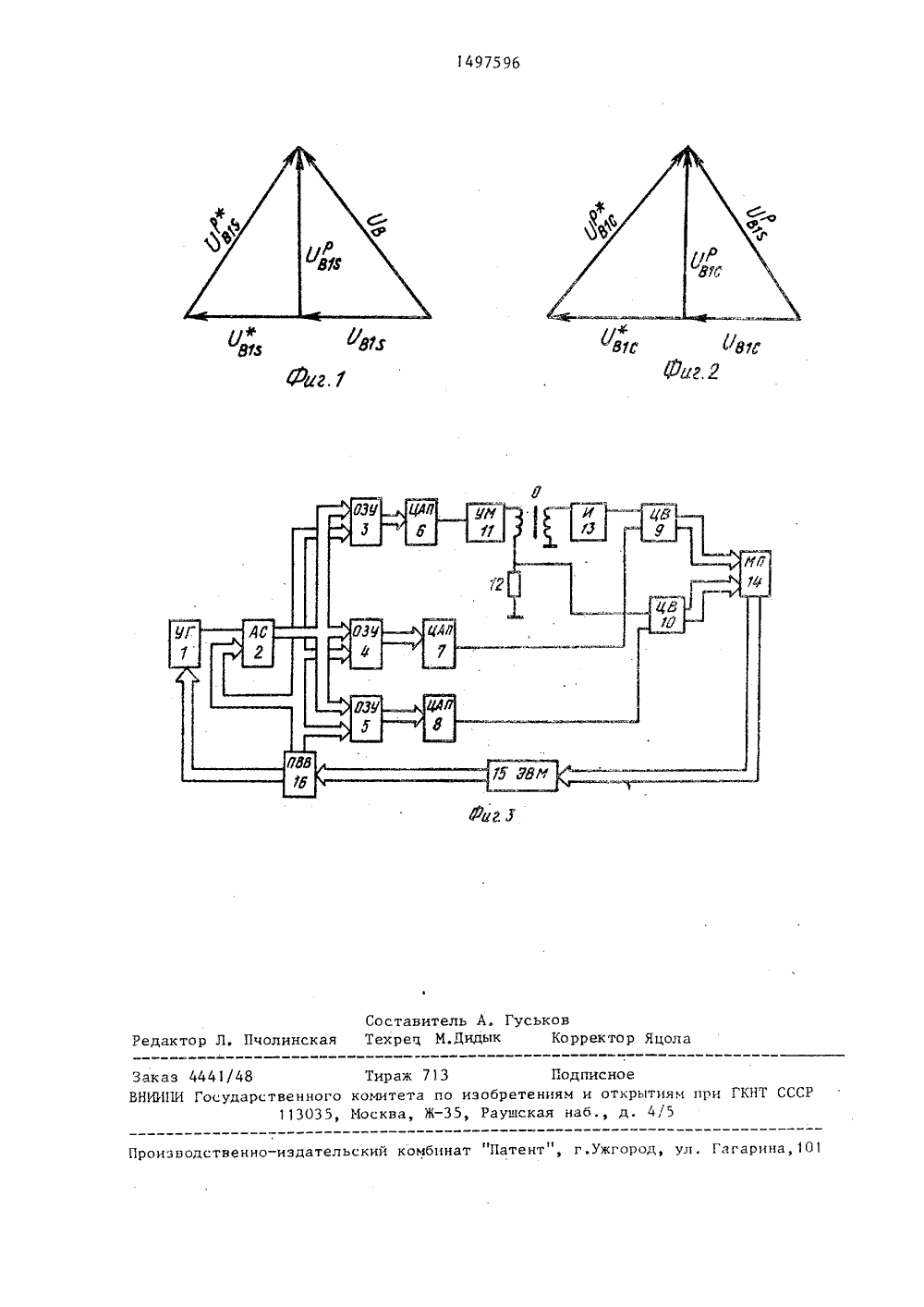
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 19) (11) 33/14 51) 4 3 ЩОЮРИПАТЕНТИ))иЧьй ПИСАНИЕ ИЗОБРЕТЕНИЯ ИБВ 1 Й;А ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР Н АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(71) Омский политехнический институт(56) Авторское свидетельство СССРУ 1264116, кл, С 01 К 33/14, 1985.(54) СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХПЕТЕЛЬ ГИСТЕРЕЗИСА ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ(57) Изобретение относится к магнитным измерениям и может быть использовано для автоматизированного определения динамических петель гистерезиса (ДПГ) ферромагнитных материалов,Цель изобретения - повышение производительности определения динамических петель гистерезиса. Способ эаклвчается в следувщем. Начинают процессперемагничивания испытуемого образца.Измеряют действующее значение напря-.жения (Н) компенсируемого сигнала (С).Генерируют С синусоидальной составляющей первой гармоники (Г) с произвольно выбранной амплитудой и определяют действующее значение этого С поформуле, Суммируя С, получают вспомогательный компенсирующий С, которыйвычитают иэ компенсируемого С, получая вспомогательный С разности, Измеряют его действующее значение. Определяют действощее значение С и амплитуду синусоидальной составляющей первой Г. Окончательно формируют компенсирувщж С, уравновешенный с компенсируемым С по синусоидальной составляющей первой Г, путем добавления С синусоидальной составляющей первой Г с амплитудой к компенсирующему,С Определяют погрешность компенсации С синусоидальной составляющей первой Г при уравновешивании компенсируемого С компенсирующим С. Проводят компенсацию по косинусоидальной составляющей первой Г способом, описанным выше. Проводят формирование компенсирующего С путем поочередного уравновешива- аф ния его с компенсируемым С по синусоидальной и косинусоидальним составляющим последующих нечетных Г описанным выше способом. Процесс компенсации завернавт тогда, когда после добавления очередной составляющей -й гармоники погрешность компенсации вспомогательного компенсирующего С станет меньше погрешности ее измерения. Компенсацию С амплитуды С компенсирующим производят одновременно с вышеописанной компенсацией. По завершении процессов компенсации производят регист- р рацию ДПГ по сформированным в процес- ау се компенсации С компенсирующего напряжения, которые уравновешены с одноименными сигналами компенсируемого напряжения по х гармоникам. 3 ил.1,(19 7, С,.Иэ ОоретениР Относится 1( магнитныг.иэмевР 11 т 1 ям и может б 1;ть 11 с 1(ольэова 11 Одля автоматизированного определениядинамических петель гистереэиса,КЦель т(з О бр- (Р нт я - по вы 111 РН 11 Р т 1 ро"ИЗВОДИТЕЛЬНОСТИ ОПРЕДЕЛРНИЯ ЦИНН 1 Я 11 т 1 Р"-ских петель гистерезиса (ДПГ).На. фиг, 1-2 изображены треугольники, связывающие действующие значениясигналов; на Фиг. 3 - структурная схесхема устройства, реализующего .спо -соб.Сущность предлагаемого способа оп -ределения динамических петель гисте-. 15резиса Ферромагнитных материалов заключается в следующем,Сигналы компенсируемого и компен(сирувщего напряжений О (1:) и 1 т ,1:)пропорциональны индукции магнитного Ополя испытуемого образца а сигналыП.) и Ь (ь) пропорциональнъ 1:напряжЕННОСтн МаГНИтНОГО ПОЛЯ ИСПЬ 1 Т 1 тЕМОГОобразца, Рассмотр 1 м процесс компенса-.ции на примере сигнала П (с) при коЭсинусоидальном режиме перемагничивания образца (Пн(С) = 1.1, соэ 2 11 К 1:,где К - частота перемагничивания 11, -амплитуда сигнала, пропорциональногонапряженности магнитного полл), Б ЗОэтом случае отсутствуют постояннаясоставляющая сигнала и четные гармоникиНачинают процесс перемагничивания испытуемого образца. Сигнал ком- упенсирувщего напряжения (компенсируКющ 1 й сигнал) ЦЭ :) равен нулю,2. Измеряют действующее значениец компенсируемого сигнала Пэ(1:),Полученное значение Фиксируют, Щ)3. Генерируют сигнал синусоидальной составляющей первой гармоники 0 , (1:) с произвольно выбранной амплитудой А, лежащей в диап 1 азоне амплитуд измеряемых сигналов, и опредеэ лявт действующее значение этого сиг,фА,нала по известной формуле ЬВв (-т"12Суммируют сигналы 11" (й) (п 1) от(Эи ь,и получают вспомогательньп 1компенсирующий сигнал ПЭ, (1).5. вычитают сигнал Пт (с) (и, 3)В( эиэ сигнала 1 т (с) и получают вспомога-т,ЭтРльный сигнал разности П (1:)" 615П ) - П , измеряют действуО." ющее значение Пэтого сигнала в(9Ь Определяют действующее значение Г сигнала синусоидальной сос 815тавляющей первой гармоники, соответствующее минимал 1 ному значению погрешности компенсации (минимальному действующему значению Е сигнала раэ -(треугольник, связывающий действующие значения сигналов по Формуле (1) показан на д 1 иг. 1) и амплитуду А( сигнала синусоидальной составляющей первой гармоники, соответствующую действующему значению 11 , как А85 =т Г 27. Окончательно Аормирувт компен Мсирующий сигнал ьэ, , уравновешенный с сигналом Ппо синусоидальВной составляющей первой гармоники путем добавления к сигналу БКв (п. 1) сигнала синусоидальной составляющей первой гармоники с амплитудой А 1,8. Определяют погрешность компен - сацнн ПЭ при уравнове 1 т 1 ивании сигнала Пя(1.) компенсирувщю 1 сигналом1/1.1 , (С) по Формуле:9. Проводят компенсацию по косинусоидальной составляющей первой гармоники способом, описанным в пп. 3-8. П ри этом в пп. б и 8 в качестве действующего значения П используют дейЭствующее значение Ь сигнала раэЭ 5Рности ПЭ, (С), а в пп, 4 и 7 в качестве сигнала ПЭ (ь) используют сигнал Б, (с, полученный при уравновешивании по синусондальной составлявщей первой гармоники. Б результате компенсации Аормирувт компенсирующий сигнал П (г.) и определяют погрешЭ(с5 14975 ность компенсации Б , (2), ТреугольРник, связываюций действующие значения сигналов, используемые при компенсации по косинусоидальной составляющей 5 первой гармоники в формуле аналогичной (1), показан на фиг. 2, где БВс - действующее значение сигнала косинусоидальной составляющей первой гармоники, соответствующее минимальному значению погрешности компенсации, Б - действующее значение сиг%ф В 1 снала косинусодальной составляющей первой гармоники при произвольно вырк брднном значении амплитуды В 1 ПВ 1 сдействующее значение сигнала разности Б (й) полученное при амплитуде сиг РкВ 1 Снала косинусоидальной составлявцей+первой гармоники, равной В,10. Далее компенсирувщий сигнал 1 (г.) формируют путем поочередного к 25 уравновешивания его с сигналом Б (й) по синусоидальным и косинусоидальным составляющим последующих нечетных гармоник, аналогично описанному в пп. 3 - 8.образом. При этом для уравновешивания по синусоидальной составлявцей каждой д-й гармоники в пп. 6 и 8 в качестве действующего значения Б используют действувщее значениеР35 1сигнала разности 1 (й), а в пп. 4 и 7 в качестве компенсирующегосигнала 1 Виспользуют сигналКк ао БВ, (1), полученные в результате компенсации по косинусоидальной составляющей (-1)-й гармоники,11Завершают процесс компенсации 45сигнала БВ(1), когда после добавленияочередной составляющей -й гармоники.погрешность компенсации Ь станет 9613, После завершения процесса ком - пенсации регистрируют ДПГ по сформированным в процессе компенсации сиг 11йалам комйенсирующего напряжениякОв, (1) и 1 ; (Т), которые уравновешены81с одноименными сигналами ПВ.) и Бн(1),компенсируемого напряжения ло д гармоникам.Устройство для осуществления способа содержит управляемый генератор (УГ) 1, подклвченный к адресному счетчику (АС) 2, выход которого соединен ,с адресными входами оперативных запоминающих устройств (ОЗУ) 3 - 5, подключенных к цифроаналоговым преобразователям (ЦАП) 6 - 8 соответственно, выходы ЦАП 7 и 8 соединены с вторыми входами цифровых вольтметров (ЦВ) 9 и 10, а ЦАП 6 через усилитель мощности (УМ) 11 соединен с намагничивавщей обмоткой испытуемого ферромагнитного образца (О) заземленной через образцовое сопротивление 12 и подключенной к первому входу вольтметра 1 О, а первый вход вольтметра 9 через интегратор (И) 13 соединен с заземленной измерительной обмоткой испытуемого образца, выходы ЦВ 9 и 10 через модуль привязки цифровых измерительных приборов (МП) 14 подключены к к выходу на сопряжение ЭВМ 15, которая через подсистему ввода-вывода дискретной информации (ПВВ) 16, реализованной на базе пяти стандартных модулей, подключена к управляемому входу УГ 1, входу принудительной установки адреса АС 2 и информационным входам ОЗУ 3 - 5.УГ 1 служит для синхронизации ра-. боты схемы в процессе измерения и изменения состояний АС 2, ЭВМ 15 управляет включением и выключением УГ 1 и установкой частоты генерируемых им импульсов, которая производится в зависимости от требуемой частоты перемагничивания.меньше погрешности ее измерения, или 5 О когда будет проведено уравновешивание по всему задаваемому максимальному числу и гармоник.12. Компенсацию сигнала Ь сигналом П (й) производят одновременно с,к 55Иописанной (пп. 1-10) компенсацией сигнала 1 В сигналом П (с). АС 2 (и-раэрядный двоичный суммируюций счетчик с возможностью предустановки) предназначен для задания адреса на все ОЗУ. С каждым приходом имимпульса с выхода УГ 1 адресный счетчик увеличивает свое состояние на 1 (адрес изменяется на 1), т,е. работа-., ет в режиме суммирования, С целью принудительной установки адреса при записи информации в ОЗУ иэ ЭВМ счет чик работает в режиме записи параллельно го кода о т ЭВМ.ОЗУ 3 - 5, предназначены дпя записи в них, хранения и воспроиэведения информации о форме кривых ЦАП 6 - 8 - для преобразования эакоцированной информации, поступавцей из ОЗУ в аналоговые сигналы, УМ 11 - для получения сигнала, достаточного дпя на- О магничивания образца в переменном поле, интегратор 13 - для получения сигнала, пропорционального индукции поля в образце, ЦВ 9 и 10 - дпя измерения действувцих значений сигналов 15 разности между одноименными сигналами компенсируемого и компенсирующего напряжений, устройство 14 сопряже" ния - для связи ЦВ 9 и 10 с ЭВМ ЭВМ 5 - для реализации алгоритма 2 п вычисления и управления блоками устройства, устройство 16 сопряжения для связи УГ , АС 2 и ОЗУ 3 - 5 с ЭВМ.При включении УГ 1 состояние АС 2 25 изменяется периодически с периодом 2ТР, где п - количество разрядов АС 2; Т- период импульсов, поступавцих с УГ. Следовательно, адрес ячейки ОЗУ; код на выходе ОЗУ и на пряжения на выходах ЦАП изменяются периодически. На входы ЦАП б - 8 сигналы поступают одновременно, причем на вход ЦАП б - код сигнала косинусондального режима перемагничивания; наК вход ЦАП 7 - код сигнала Бв(й), на вход ЦАП 8 - код сигнала 11 (1), Прокн йдя через ЦАП б - 8 сигналы, преобразованные в аналоговую форму, поступают соответственно на УМ 11 и вторые входы ЦВ 9 и 10. С УМ 11 сигнал, достаточный для намагничивания торси- дального образца в переменном ноле поступает на его намагничивающую обмотку.Первый сигнал компенсируемого напряжения Б (1) пропорциональный нг. -нв ряженности магнитного поля, снимается с образцового сопротивления 12 и поступает на первый вход ЦВ 1 О. Второй сигнал компенсируемого напряжения 5, пропорциональный индукции магнитного поля, снимается с измерительной обмотки образца и через интегратор 13 поступает на первый вход ЦВ 9. На выходах ЦВ 9 и 10 появляются сигР Р налы действующих значений П и П96 Я-.(Е) ПИ) = 0 - 1.,И).Запись информации в ОЗУ 3 - 5 производится через ПВВ 16 и АС 2, причем в ОЗУ 3 хранится информация о требуемом режиме перемагничивания образца (не изменяется в процессе компенсации), в ОЗУ 4 и 5 - информация о комК пенсирующих сигналах П (ь) и Бя(С) соответственно (перед началом компенсации туда записываются купи).После заполнения всех ячеек памяти ОЗУ 3 - 5 ЭВМ через ПВВ 16 выдает команду на включение УГ 1, На выходах ЦВ 9 и 10 появляются действующие значения Б 8 и П я сигналов компенсируемого напряжения, так как сигналы комкпенсируйщего напряжения Б(Й) и П,(1) равны нули, Эти действующиезначения фиксируются в памяти ЭВМ. Затем ЭВМ записывает в ОЗУ 4 и 5 коды, соответствуюцие сигналам компенксируюцего напряжения Б, (г.) и,кБИ,5(С), сформированным путем добавления к сигналам 11 (С) и Б(С) (нулевым) сигналов синусоидальных состав. - лявфх первых гармоник П (С) и615 Б(1) с произвольно выбранными зна(б+ Ф чениями амплитуд А, и С, соответственно, и определяет действующие знаФ +чения 11 б и Б 1 б этих составляющих и фиксирует ис. После этого иэмерявтР- Р ся действующие значения Б,з и Б 1,Рсигналов разности Б, (С) = П-Ои 11(Е) - 11(С) Ь , ( ) которые также фиксируются в ЭВМ. Затем по формуле (2) определяются действующие значения Б, и Бд сигна - лов синусоидальных составляющих первых гармоник, соответствующие минимальным значениям погрешностей компенсации, а также соответствующие им амплитуды Аи С этих составляющих. Далее ЭВМ окончательно формирует комк, к пенсируюцие сигналы Б 8 5 ( 1 ) и У з ( 1 ) уравновешенные с сигналами 11 иБХ(С) по синусоидальным составляющим первых гармоник, путем добавления кКсигналам Б (С) и П(й) нулевых сигна 5 лов синусоидальных составляющих первых гармоник с амплитудами Аи С записывает сформированные сигналы в ОЗУ 4 и 5 и определяет компенсации П и Бн, при уравновешивании сигР Р 10 618налов Пи БН(1) компенсирующимиК Ксигналами 0,и ПН (С), После этого начинается анаюгичный описан ному процесс компенсации по косинусоидальным составлявщим первых гармоник. При этом для определения действующих значений Пв,си ПН,с сигналов этих составляюцих, соответствующих 20 минимальным значениям погрешностей компенсации, в качестве действующих значений П и БХ используются дейстевующие значения БВ, и ПЙ, сигналовРразности Б бБХ 15, а в каче 615сгнало Пя(С) и БХ(Й) сигналы,к ккПя (Е) и ПН ЗДальнейшее формирование компенси рующих сигналов Бя и П(й) осущест- К по синусоидальным и косинусоидальным 35составлявцим последующих нечетныхгармоник аналогично описанному."я, (") = П И) - П,РН 1 нПН,вляется путем их поочередного уравновешиваниЯ с сигналами Ья(1) и ПН(й) Завершится процесс компенсации,когда после добавления очередной составлявщей д-й гармоники к текущемуформирующему компенсирующему сигнапуК КБ (й)(Пн(Г. погрешность компенсации(деиствующее значение В (П н сигна 45Р Р,ла разности Б ,(С)(П (й станетР,Р меньше погрешности ее измерения или, когда будет проведено уравновешивание по всему задаваемому максимальному числу п гармоник.После завершения процесса компен-,. сации на двухкоординатном самописце, подключенном к ЭВМ, производится регистрация динамической петли гистерезиса по сформированным в процессе55 компенсации сигналам компенсирующегоХ кнапряжения Б я;и Б н, ( ) . Формула изобретения Способ определения динамических петель гистерезиса ферромагнитных материалов, включающий формирование сигналов компенсирующего напряжения КБ (С) и П (е) пропорциональных одноименным сигналам индукции П (1) и на"Впряженности магнитного поля Б(Т) компенсируемого напряжения, в виде суммы синусоидальных и косинусоидальных сигналов составляющих гармоник с частотами, кратными частоте перемагничивания: И (к) =(А; яи ЯЕ + В; соя 1 УЕ) ИУН(с) = (С, яы ди 1+Э,соя 1 Ю),гдето= 27 К;ЪГ - частота перемагничивания;ф В С11 - амплитуд составляющих гармоник компенсирующего напряжения;и - максимальное число гармоник, компенсацив сигналов Цб(С) и Бн(С) одноименными сигналами Б (Г) и БН(С) проводимую добавлением к сигналу компенсируюцего напряжения Бв, (С)Кс 8-Бн(1), соответствующему числу гармоник (-1) генерируемых составляющих сигнала х-й гармоники, и определение погрешности компенсации в видедействувцего значения 1 Р (П )всигнала разности между одноименными сигналами компенсируемого и компенсирувцего напряжений, регистрацив динамической петлигистерезиса по полученным сигналамкомпенсирующего напряжения, о т л ич а ю ц и й с я тем, что, с цельюповышения производительности определения динамических петель гистерезиса,формируют сигнал для каждой составля497596 зывающих действу)г)щие значения измеряемых сигналов(В 1 ("в)-) ("Р) (фВ) ) 1Р.,= 12 туд измеряемых сигналов, суммируют сигналы УВ Бн,., и 11 В,ФО,11(Г) для полученИя вспомогательного сигнала компенсирующего напряжеММ Г ИниЯ БВ 10(1(с) р вычитают сигналГ КОВ,(С) 0 н, (й)1 из сигнала компенси 15 руемого напряйения(О) к(О) Ппя получения вспомогательного сигналаРФ % разности Б Е, (й) = 0 В - БВ 1 И)Р 4 КЮ"Н (") "н(") 11 В 1 Ж определяют 2 О действующее значение 01(0 я 1) и амгд плитуду Р, (Р 1), соответствующую одной из амйлитуд А (С;), В) (О;) сигнала составляющей -й гармоники ком 25 пенсирующего напряжения, соответствующие минимальному значению погрешности компенсации, генерируют сигнал составляющей д-й гармоники с амплитудой Р 8, (Р ) и суммируют его с сигналом30 У,ГБН .,(й) дня получения оконВ 1111чательного сигнала компенсирующегоГ кнапряжения Оа, (Е) ,(г), еаканчивают процесс компенсации, когда после 35 добавления очередной составляющей х-й гармоники погрешность компенсацииР Р0 (О ,) станет меньше погрешности ее , измерения или при использовании всех 4 О и гармоник, причем действующее значение 11 Е фй)р амплитуду РВ (Ри ) и по,Ргрешность компенсации Б (0 ) опреВ 1 Й 1ат из следующих соотношений свя ч оответствующее миРе, (" н 1 действуюают в про еляю Нией к-й гаРмоники ое, (Г),пк (О)Г фСпроизвольно выбранной амплитудой .Р, (Р 1,) в диапазоне значений амплиФ Ф5" В) в действующее значениесигнала. разности, со нимальному значению погрешности компенсации, полученной после уравновешивания по составляющей (-1)-й гармоники; действующее значение сигнала составляющей 1-й гармоники с произвольной амплитудой4 ФР,1 (Р,1) ( числить как УВ Рв,Р.1Н)) ) - действующее значение вспомогательного сигнала разности 11 В 1( ) 11,( ), щие значения сигналов полуцессе компенсации.1497596 Составитель А. Гуськовр Л, Пчолинская Техреду М.Дидык Корректор Яцола Т СССР Производственно в издательск комбинат "Патент", г.ужгород Гагарина, 101 Заказ 4441/48НИИПИ Государственного113035,Тираж 713 митета по иэоб сква, Ж, Ра Подписноекиям и открытиям приая наб., д. 4/5
СмотретьЗаявка
4074410, 04.06.1986
ОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
СЕЛЕЗНЕВ ЮРИЙ ВАЛЕРИАНОВИЧ, ИВАНОВА НИНА ИВАНОВНА, АРОНОВ АНДРЕЙ ЯКОВЛЕВИЧ, ДОБРОВОЛЬСКИЙ СЕРГЕЙ МИХАЙЛОВИЧ, ФИЛЕЙ ГРИГОРИЙ ПАВЛОВИЧ
МПК / Метки
МПК: G01R 33/14
Метки: гистерезиса, динамических, петель, ферромагнитных
Опубликовано: 30.07.1989
Код ссылки
<a href="https://patents.su/7-1497596-sposob-opredeleniya-dinamicheskikh-petel-gisterezisa-ferromagnitnykh-materialov.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения динамических петель гистерезиса ферромагнитных материалов</a>
Способ динамической компенсеции дрейфа постоянной составляющей низкочастотного синусоидального сигнала

Номер патента: 482686
Опубликовано: 30.08.1975
Авторы: Карпенко, Климменкоо
МПК: G01R 19/00
Метки: динамической, дрейфа, компенсеции, низкочастотного, постоянной, сигнала, синусоидального, составляющей
...сигналами;У;,р - приведенный к входу линейной цепи источник напряжения дрейфа. где Для компенсации сигнала дрейфа К Ур постоянной составляющей вырабатывают на протяжении п циклов компенсации уровень напряжения постоянного тока Ук = и 1/ст +: - У, противоположной по знаку и равный по величине К Ур с точностью, определяемой дискретностью установки компенсирующего напряжения, где У - уровень дискретности; С - уровень напряжения компенсации.Синусоидальный сигнал с постоянной составляющей, не зависящей от времени, (фиг. 2,а) пропускают через линейную цепь 1 с дрейфом, представляющую собой идеализированную линейную цепь без дрейфа, и приведенный к входу линейной цепи источник напряжения суммарного дрейфа. Выходной сигнал линейной цепи...
Устройство для компенсации постоянной составляющей периодического сигнала

Номер патента: 1448374
Опубликовано: 30.12.1988
Автор: Косюк
МПК: G01R 19/04, H02M 5/00
Метки: компенсации, периодического, постоянной, сигнала, составляющей
...з 14483 7Управление работой устройства осуществляется следующим образом,После запоминания максимальногозначения входного сигнала пиковым5детектором 4 напряжение на его вхо де становится меньше его выходногонапряжения и на выходе стробируемого компаратора 3 появляется напряжение логической единицы, которое подается на первые входы элемента 12 Ии элемента 10 ИСКЛЮЧАЮЩЕЕ ИЛИ, Таккак на втором входе элемента 10 ИСКЛЮЧАЮЩЕЕ ИЛИ, подключенного к выходам формирователя 14, напряжениеравно нулю, то согласно таблицесостояний элемента ИСКЛЮЧАЮЩЕЕ ИЛИна его выходе будет напряжение поуровню, равное логической единице,которое подается на стробируемый20вход компаратора 3, Таким образом,компаратор 3 переходит в режим "за 1поминаниеПосле запоминания...
Устройство для компенсации фоновых составляющих телевизионного сигнала

Номер патента: 1288935
Опубликовано: 07.02.1987
Авторы: Константинов, Николаев
МПК: H04N 5/14
Метки: компенсации, сигнала, составляющих, телевизионного, фоновых
...выхода селектора 7 сигнал ошибки компенса ции фона тем ного пол я Б- (фи г. 2 г) поступает на вход АЦП 8, пос- чего в виде М-разрядного двоичного кода через второй коммутатор 6, включенный в соответствии с внешним сигналом коммутации, поданным на его управляющий вход, поступает на вход блока 11 памяти первого канала 9 запоминания, в котором осуществляется его запоминание в соответствии с сигналом разрешения, поступающим на управляющий вход С выхода этого блока1 памяти сигна". ошибки компенсации фона темного поля через ЦАП 12 поступает на вход фильтра 13 25 нижних частот, в котором осугцествляетсяего сглаживание. С выхода фильтра 13 нижних частот первого канала 9 запоминания восстановленный в аналогов ю форму сигнал ошибки...
Способ компенсации дрейфа нуля интегратора при интегрировании периодического сигнала без постоянной составляющей

Номер патента: 873249
Опубликовано: 15.10.1981
Авторы: Россо, Рудаков, Столяров
МПК: G06G 7/186
Метки: дрейфа, интегратора, интегрировании, компенсации, нуля, периодического, постоянной, сигнала, составляющей
...подаются на.инвертирующий вход интегратора 1. Выход интегратора873249 Формула изобретения Заказ 9049/75 Подписное соединен с коммутирующим ключом 2, который через диоды 8 и 9 соединен с инвертирующими входами интеграторов б и 7 дрейфа нуля. Параллельно интеграторам б и 7 дрейфа нуля включены коммутирующие ключи 3 и 4. Выходы интеграторов б и 7 дрейфа нуля подключены на инвертирующий вход операционного усилителя 10.Способ осуществляется следующим образом. ОНа инвертирующий вход интегратора 1 подается сигнал. На выходе, после выполнения операции интегрирования к полезному сигналу добавляется сигнал, пропорциональный интегралу от дрейфа нуля. для выявления составляю з щей, обусловленной дрейфом, выходной сигнал через коммутирукарсй...
Способ формирования сигнала рассогласования между углом поворота вала и его кодовым значением

Номер патента: 462195
Опубликовано: 28.02.1975
Авторы: Курахтанов, Москалев, Тараев
МПК: G08C 9/00
Метки: вала, значением, кодовым, между, поворота, рассогласования, сигнала, углом, формирования
...импульсов Уь длительность которых находится в линейной зависимости от кодового значения угла, формирователь 3 симметричных двуполярных импульсов, длительность которых является дополнением длительности выходных импульсов формирователя 2 до половины периода, синусно-косинусный вращающийся трансформатор (СКВТ) 4, электрический фильтр 5 и фазочувствительный выпрямитель б.Устройство работает следующим образом.В регистре 1 хранится кодовое значение угла Л. Формирователи 2 и 3 формируют последовательности двуполярных импульсов У,(1) и Ув(1), которые можно представить в виде рядао 3 нои ко оставитель А. Смирнов Техред А. КамышниковаКорректор В. Брыксина актор Е, Караулова 1206ного комитета изобретений .35, Раушская Тираж 6 овета Ми открытий...
Предыдущий патент: Устройство для измерения динамических магнитных характеристик
Следующий патент: Устройство для отбора ядерных частиц
Случайный патент: Устройство для зачистки катанки от окалины