Система числового программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
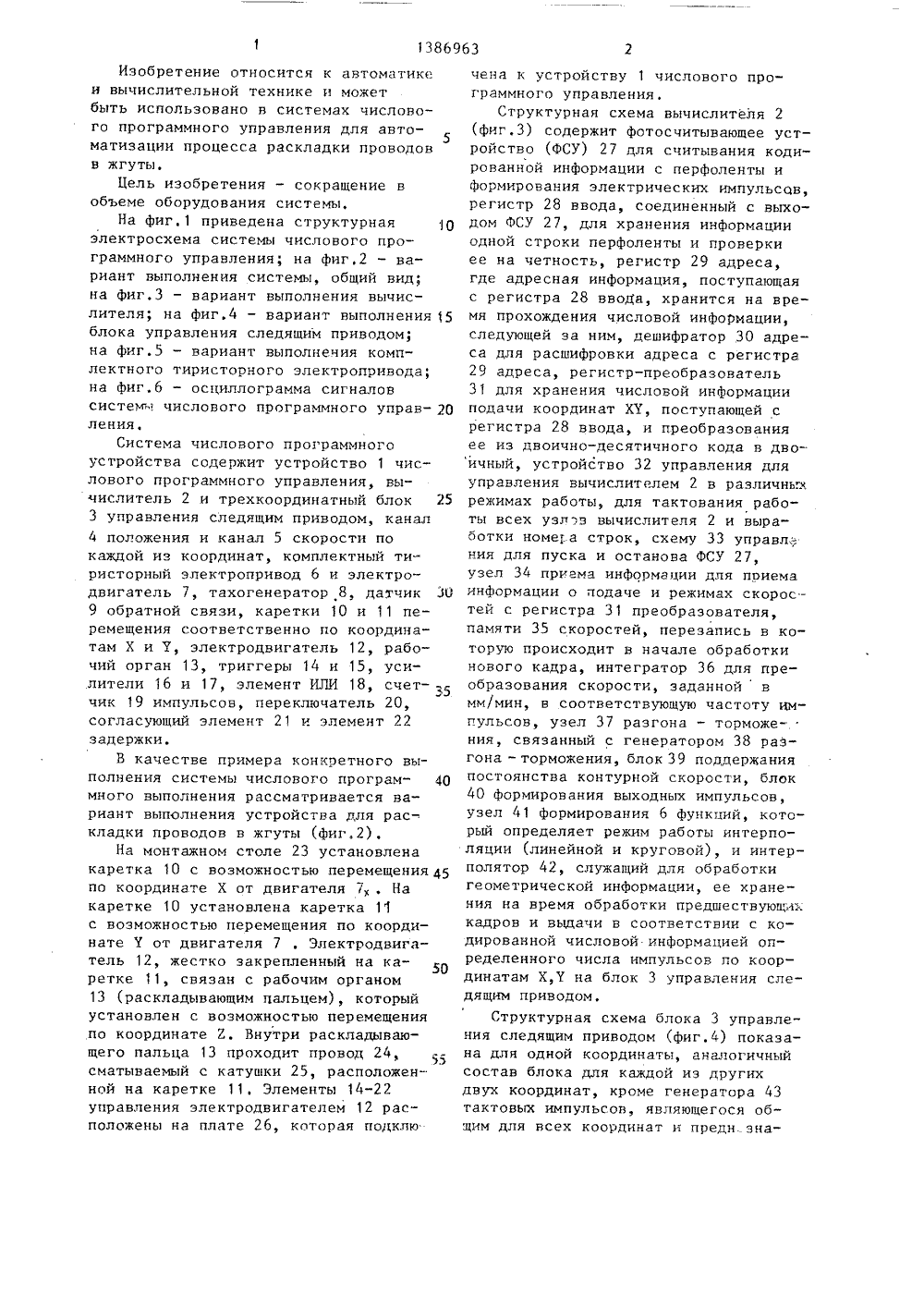
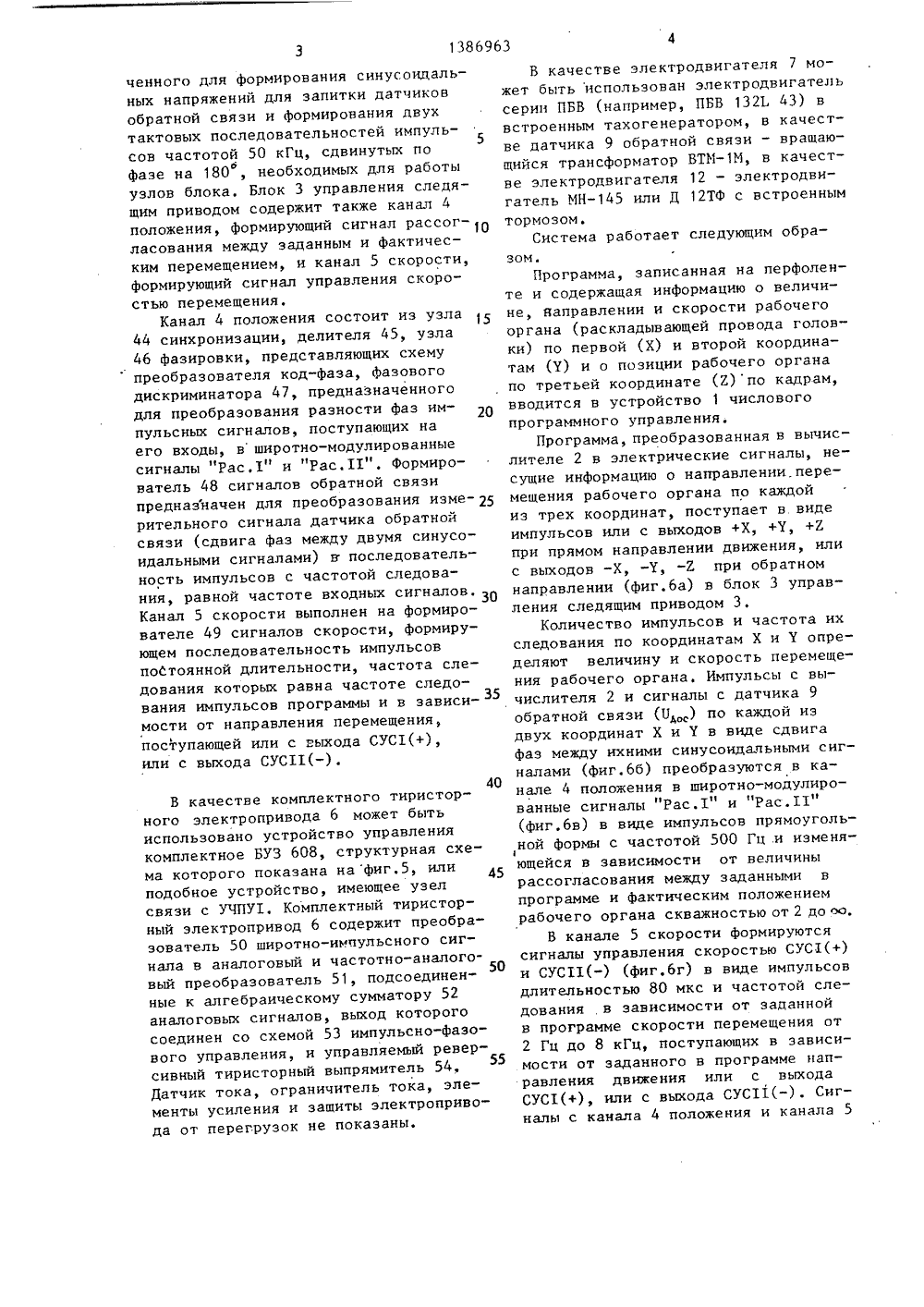
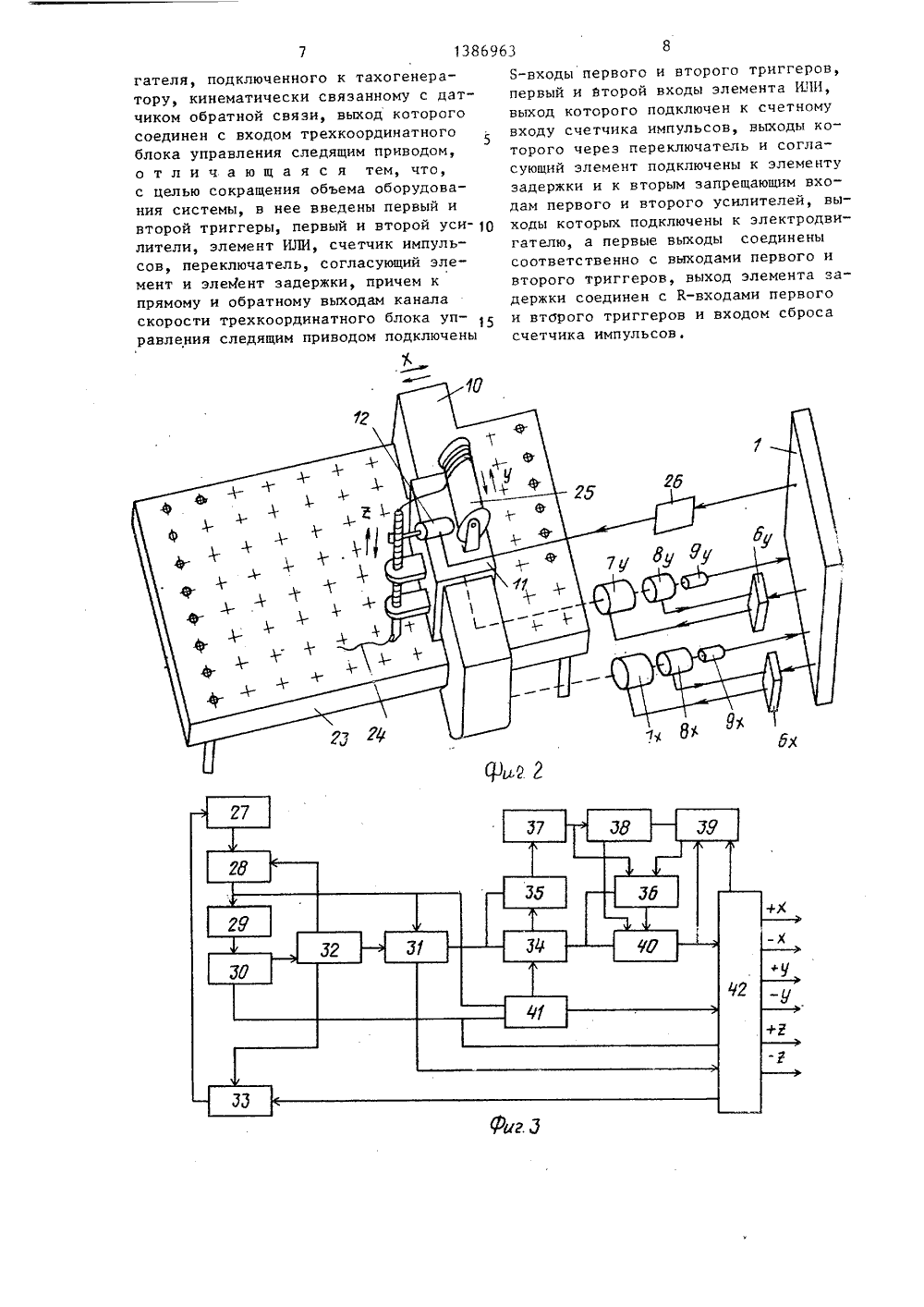
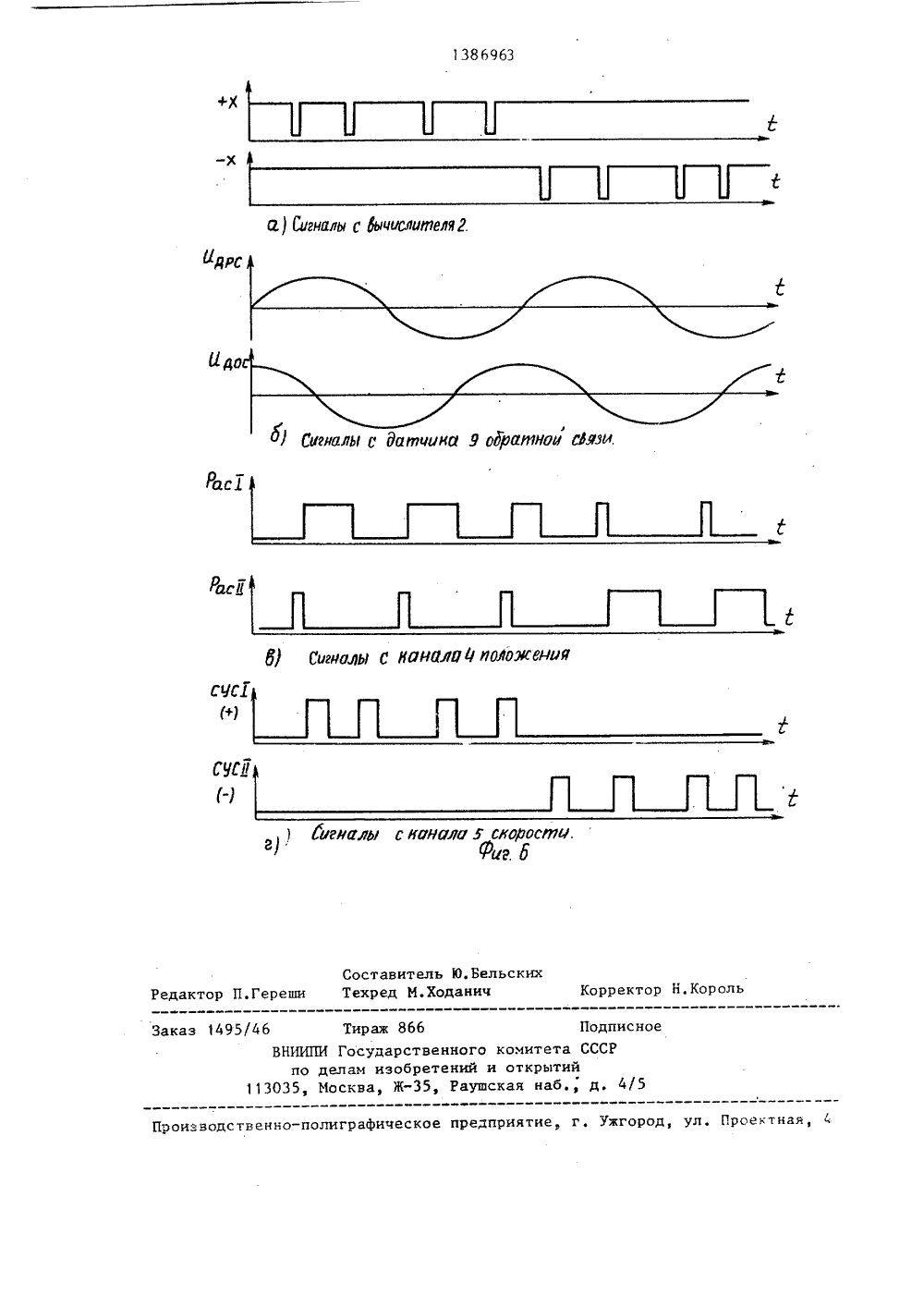
СОЮЗ СОВЕТСНИ 1(СОЦИАЛИСТИЧЕСНРЕСПУБЛИК а)138696 504 605 В 19 ЕТЕ К АВТОРСКОМ ВУ етельство СССР В 19/ 18, 1985. ваго программного 00654, ЛЭМЗ, аль(54)УПРА(57)тикежетчисл ОГО СИСТЕМА ЧИЛЕНИЯИзобрети вычисыть испвого пр ОГО ПРО носится к автомаой технике и моно в системахого управления ение о литель ользов ограмм ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ САНИЕ ИЗ(56) Авторское свидУ 1010598, кл. С 0Устройство числуправления Н 33 Убом У 1, 1977. оборудованием, в частности в машиностроении для автоматизации процессараскладки проводов в жгуты, в уста,новках для сварки и окраски неплоских поверхностей различных изделийи в других трехкоординатных устройствах с программным управлением, Цельизобретения состоит в сокращении обо"рудования, Введение в канал скорос-ти по третьей координате триггеров14 и 15, усилителей 16 и 17, элементаИЛИ 18, счетчика 19 импульсов, переключателя 20, согласующего элемента21 и элемента 22 задержки времени,образующих схему преобразования заданной в программе скорости перемещения, позволяет сократить оборудованиев два раза. 6 ил.Изобретение относится к автоматикеи вычислительной технике и можетбыть использовано в системах числового программного управления для авто 5матизации процесса раскладки проводовв жгуты.Цель изобретения - сокращение вобъеме оборудования системы,На фиг,1 приведена структурная 10электросхема системы числового программного управления; на фиг,2 - вариант выполнения системы, общий вид;на фиг,З - вариант выполнения вычислителя; на фиг.4 - вариант выполнения 15блока управления следящим приводом;на фиг.5 - вариант выполнечия комплектного тиристорного электропривода;на фиг,6 - осциллограмма сигналовсистемч числового программного управления,Система числового программногоустройства содержит устройство 1 числового программного управления, вычислитель 2 и трехкоординатный блок 253 управления следящим приводом, канал4 положения и канал 5 скорости покаждой из координат, комплектный тиристорный электропривод 6 и электродвигатель 7, тахогенератор 8, датчик 309 обратной связи, каретки 10 и 11 перемещения соответственно по координатам Х и 7, электродвигатель 12, рабочий орган 13, триггеры 14 и 15, усилители 16 и 17, элемент ИЛИ 18, счет-;5чик 19 импульсов, переключатель 20,согласующий элемент 21 и элемент 22задержки.В качестве примера конкретного выполнения системы числового програм" 40 много выполнения рассматривается вариант выполнения устройства для раскладки проводов в жгуты (Фиг,2).На монтажном столе 23 установлена каретка 10 с возможностью перемещения 45 по координате Х от двигателя 7 . На каретке 10 установлена каретка 11 с возможностью перемещения по координате Ъ. от двигателя 7 . Электродвигатель 12, жестко закрепленный на каретке 11, связан с рабочим органом 13 (раскладывающим пальцем), который установпен с возможностью перемещения по координате Е. Внутри раскладывающего пальца 13 проходит провод 24, сматываемый с катушки 25, расположенной на каретке 11Элементы 14-22 управления электродвигателем 12 расположены на плате 26, которая подкпю чена к устройству 1 числового программного управления.Структурная схема вычислителя 2 (фиг.З) содержит фотосчитывающее устройство (ФСУ) 27 для считывания кодированной информации с перфоленты и Формирования электрических импульсов, регистр 28 ввода, соединенный с выходом ФСУ 27, для хранения информации одной строки перфоленты и проверки ее на четность, регистр 29 адреса, где адресная информация, поступающая с регистра 28 ввоДа, хранится на время прохождения числовой информации, следующей за ним, дешифратор 30 адреса для расшифровки адреса с регистра 29 адреса, регистр-преобразователь 31 для хранения числовой информации подачи координат ХУ, поступающей с регистра 28 ввода, и преобразования ее из двоично-десятичного кода в двоичный, устройство 32 управления для управления вычислителем 2 в различных режимах работы, для тактования работы всех узлов вычислителя 2 и выработки номера строк, схему 33 управл,-, ния для пуска и останова ФСУ 27, узел 34 приема информации для приема информации о подаче и режимах скоростей с регистра 31 преобразователя, памяти 35 скоростей, перезапись в которую происходит в начале обработки нового кадра, интегратор 36 для преобразования скорости, заданной в мм/мин, в соответствующую частоту Импульсов, узел 37 разгона - торможения, связанный с генератором 38 разгона в торможен, блок 39 поддержания постоянства контурной скорости, блок 40 Формирования выходных импульсов, узел 41 формирования 6 функций, который определяет режим работы интерполяции (линейной и круговой), и интерполятор 42, служащий для обработки геометрической информации, ее хранения на время обработки предшествующих кадров и выдачи в соответствии с кодированной числовой информацией определенного числа импульсов по координатам Х,У на блок 3 управления следящим приводом.Структурная схема блока 3 управления следящим приводом (фиг,4) показана для одной координаты, аналогичный состав блока для каждой из других двух координат, кроме генератора 43 тактовых импульсов, являющегося общим для всех координат и предн.зна 1386963ченного для формирования синусонцальных напряжений для запитки датчиков обратной связи и формирования двух тактовых последовательностей импуль 5 сов частотой 50 кГц, сдвинутых по фазе на 180 , необходимых для работы узлов блока, Блок 3 управления следящим приводом содержит также канал 4 положения, формирующий сигнал рассог ласования между заданным и фактическим перемещением, и канал 5 скорости, формирующий сигнал управления скоростью перемещения.Канал 4 положения состоит из узла 44 синхронизации, делителя 45, узла 46 фазировки, представляющих схему преобразователя код-фаза, фазового дискриминатора 47, предназначенного для преобразования разности фаз импульсных сигналов, поступающих на его входы, вширотно-модулированные сигналы "Рас.1" и "Рас.ТТ", формирователь 48 сигналов обратной связи предназначен для преобразования изме рительного сигнала датчика обратной связи (сдвига фаз между двумя синусоидальными сигналами) в последовательность импульсов с частотой следования, равной частоте входных сигналов, Канал 5 скорости выполнен на формирователе 49 сигналов скорости, формирующем последовательность импульсов постоянной длительности, частота следования которых равна частоте следования импульсов программы и в зависимости от направления перемещения, поступающей или с выхода СУСТ(+), или с выхода СУС 11(-). 40В качестве комплектного тиристорного электропривода 6 может быть использовано устройство управления комплектное БУЗ 608, структурная схема которого показана на фиг.5, или 45 подобное устройство, имеющее узел связи с УЧПУТ, Комплектный тиристорный электропривод 6 содержит преобразователь 50 широтно-импульсного сигнала в аналоговый и частотно-аналого 50 вый преобразователь 51, подсоединенные к алгебраическому сумматору 52 аналоговых сигналов, выход которого соединен со схемой 53 импульсно-фазового управления, и управляемый ревер 55 сивный тиристорный выпрямитель 54, Датчик тока, ограничитель тока, элементы усиления и защиты электропривода от перегрузок не показаны. В качестве электродвигателя 7 может быть использован электродвигатель серии ПБВ (например, ПБВ 1321, 43) в встроенным тахогенератором, в качестве датчика 9 обратной связи - вращающийся трансформатор ВТММ, в качестве электродвигателя 12 - электродвигатель МНили Д 12 ТФ с встроеннымтормозом.Система работает следующим образом.Программа, записанная на перфоленте и содержащая информацию о величине, направлении и скорости рабочего органа (раскладывающей провода головки) по первой (Х) и второй координатам (У) и о позиции рабочего органа по третьей координате (Е) по кадрам, вводится в устройство 1 числового программного управления.Программа, преобразованная в вычислителе 2 в электрические сигналы, несущие информацию о направлении. перемещения рабочего органа по каждой из трех координат, поступает в виде импульсов или с выходов +Х, +У, +Е при прямом направлении движения, или с выходов -Х, -У, -Е при обратном направлении (фиг.ба) в блок 3 управления следящим приводом 3.Количество импульсов и частота их следования по координатам Х и у определяют величину и скорость перемещения рабочего органа, Импульсы с вычислителя 2 и сигналы с датчика 9обратной связи (П, ) по каждой иэдвух координат Х и У в вице сдвигафаз между ихними синусоидальными сигналами (фиг.бб) преобразуются в канале 4 положения в широтно-модулированные сигналы "Рас1" и "Рас.11" (фиг.бв) в виде импульсов прямоугольной формы с частотой 500 Гц .и изменяющейся в зависимости от величины рассогласования между заданными в программе и фактическим положением рабочего органа скважностью от 2 дооо,В канале 5 скорости формируются сигналы управления скоростью СУС 1(+) и СУСТ 1(-) (фиг,бг) в виде импульсов длительностью 80 мкс и частотой следования в зависимости от заданной в программе скорости перемещения от 2 Гц до 8 кГц, поступающих в зависимости от заданного в программе направления движения или с выхода СУС 1(+), или с выхода СУС 11(-). Сигналы с канала 4 положения и канала 5скорости по каждой из двух координат Х И У поступают на комплектный тиристорный электропривод 6, где в преобразователе 50 широтно-импульсный сиг 5 нал канала положения преобразуется в аналоговый, линейно-зависимый от скважности импульсов, а в преобразователе 51 частотный сигнал канала скорости преобразуется в линейно за О висимый от частоты аналоговый сигнал.Аналоговые сигналы с преобразователей 50 и 51 и линейно зависимый ат скорости перемещения рабочего органа сигнал с тахогенератора 8 алгебраически суммируются в сумматоре 52, С выхода сумматора 52 сигнал поступает на вход схемы 53 импульсно-фазового управления, которая преобразует величину и знак аналогового сигнала в 20 последовательность прямоугольных управляющих импульсов соответствующей фазы, которые поступают на управляющие входы реверсивного тиристорнаго выпрямителя 54, в котором происходит 25 преобразование трехфазной питающей сети в постоянный ток, подаваемый на якорь электродвигателя 7, Величины тока, его направление в якоре электродвигателя, определяющие скорость и направление перемещения рабочего органа, зависят от параметров входных сигналов.По третьей координате (Е) инфарма" ция в величине перемещения рабочего органа (о его позиции по высоте) задается в программе функцией скорости. т.е, частотой импульсов. Импульсы в зависимости от направления движения, заданного в программе, поступают с прямого (+) или с обратного (-) выхода канала 5 скорости по третьей координате на Б-вход триггера 14 или триггера 15 и на первый или второй вход элемента ИЛИ 18. Предварительно45 перед началом работы триггеры 14 и 15 и счетчик 19 с устройства 1 числового программного управления устанавливаются в нулевое состояние.Пусть импульсы поступают с прямого (+) выхода канала 5 скорости. С приходом первого импульса триггер 14 по Б-входу устанавливается в единичное состояние и открывает усилитель 16, через который включается электродвигатель 12, и рабочий орган 13 перемещается в прямом направлении до тех пор, пока импульсы, поступающие через элемент ИЛИ 18 на счетный вход счетчика 19, не заполнят его содержимое да состояния, определяемого положением переключателя 20, при котором сигнал с выхода счетчика 19 в качестве запрещающего поступает через переключатель 20 и согласующий элемент 21 на усилитель 16, закрывает его и движение рабочего органа по третьей координате прекращается.Через задержку времени, определяемую элементом 22 и необходимую для перехода программы на следующий ее кадр, сигнал с выхода счетчика 19 сбрасывает триггер 14 и счетЧик 19 в нулевое состояние и схема в этом случае готова к приему информации следующего кадра программы.Таким образом, величина перемещения рабочего органа 13 па третьей координате (Е), т.е. время, за которое малогабаритный электродвигатель 12, подключенный к выходу схемы преобразования заданной в программе скорости перемещения (частоты импульсов) в саатветст"-ующий временной интервал, зависит от частоты импульсов и пропорциональна периоду их следования С помощью и .пеключателя 20 налажив-. ется электросхема перемещения по третьей координате, т.е, определяется какой величине перемещения соответствует определенная частота импульсов. Это делается только в опытном экземпляре системы, чтобы по данным опыта правильно составить программу системы и определить оптимальное количест-. ва импульсов, задаваемых в программе по третьей координате. Для повыщения точности работы системы питание электродвигателя 12 должно быть стабилизированным.Ф а р м ул а и з о б р е т е н и яСистема числового программного управления, содержащая вычислитель, трехкоординатный блок управления следящим приводом, комплектный тиристорный электрапривод, электродвигатель, тахогенератор и датчик обратной связи, причем управляющие выходы вычислителя подключены к управляющим входам трехкоординатного блока управления следящим приводам, подключенного выходами каналов положения и скорости по каждой координате к комплектномутиристорному электроприводу, соединенного выходами с входом элек-родви 1386963гателя, подключенного к тахогенератору, кинематически связанному с датчиком обратной связи, выход которого соединен с входом трехкоординатного блока управления следящим приводом, о т л и ч а ю щ а я с я тем, что, с целью сокращения объема оборудования системы, в нее введены первый и второй триггеры, первый и второй уси О лители, элемент ИЛИ, счетчик импульсов, переключатель, согласующий элемент и элемент задержки, причем к прямому и обратному выходам канала скорости трехкоординатного блока управления следящим приводом подключеныК10 Б-входы первого и второго триггеров,первый и второй входы элемента ИЛИ,выход которого подключен к счетномувходу счетчика импульсов, выходы которого через переключатель и согласующий элемент подключены к элементузадержки и к вторым запрещающим входам первого и второго усилителей, выходы которых подключены к электродвигателю, а первые выходы соединенысоответственно с выходами первого ивторого триггеров, выход элемента задержки соединен с К-входами первогои второго триггеров и входом сбросасчетчика импульсов,1386963 а) Сигналы С Ьчислищелю 2. и. гнал чииа ас 9 Сиги о О Ф положен УС 1) 1 иеналы с ионопц Х скоростей.Яг о тавитель Ю,Бельскред М.Ходанич роль ректор реши едакто каз 1495/46 дписноеСР 4/ Производственно-полиграфическое предприятие, г. Ужгород, ул СЩ(-) Тираж 8661 ИПИ Государствено делам изобретеМосква, Ж,го комитетий и открыт ушская наб
СмотретьЗаявка
4111212, 26.05.1986
ПРЕДПРИЯТИЕ ПЯ Р-6719
КУЛАКОВ ЮРИЙ АЛЕКСАНДРОВИЧ, РАЧКОВ БОРИС СТЕПАНОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, числового
Опубликовано: 07.04.1988
Код ссылки
<a href="https://patents.su/7-1386963-sistema-chislovogo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система числового программного управления</a>
Механизм контроля скорости перемещения материала в рабочую зону пресса

Номер патента: 880575
Опубликовано: 15.11.1981
Авторы: Кац, Милейко, Овруцкий, Радкевич, Шприцер
МПК: B21D 43/00
Метки: зону, механизм, перемещения, пресса, рабочую, скорости
...зону пресса работает следующим образом.Включают гидроцилиндр 8, и он поднимает валок 1. В зазор между валками 1 и 2 подают материал 27 (вручную или вспомогательным механизмом) .Включают силовой гидроцилиндр 8 и он опускает валок 1, Валок 1 прижимает материал 27 к валку 2. С помощью системы 16 управления по цепи 18 подают сигнал на включение шагового электродвигателя 5, который через гидроусилитель 4 приводит во вращательное движение валок 2.Материал 27, зажатый валками и 2, подается в рабочую зону пресса 19, Верхний валок 1 вращается под 10 15 20 25 30 40 45 действием силы трения, возникающеймежду ним и материалом 27.Вал 6 валка 1, вращаясь, приводитво вращательное движение через шестрени 9 и 10 выходной вал тахогенератора 1. На выходе...
Устройство для перемещения и установки рабочего органа машины в заданном положении

Номер патента: 506316
Опубликовано: 05.03.1976
Автор: Поль
МПК: F15B 15/24
Метки: заданном, органа, перемещения, положении, рабочего, установки
...канады 39 и 40.Каналы управления 28 и 29 следящего золотника 1 соединены с насосом 58 и с резервуаром через четырехходовый пилотный клапан 59, позволяющий изменять направлениепотока масла между этими двумя каналами.На каждом из каналов управления 28 и 29имеются дроссельные клапаны 60 и 61 и редукторы давления 62 на канале, соединяющемнасос 58 с пилотным клапаном 59.Наконец, на каналах 26 и 27 возврата масла после их соединения устанавливают дроссельный клапан 63, шунтируемый клапаном 64.Устройство работает следующим образом.Когда к золотнику 3 не приложено усилиесо стороны рычага 51 и гидравлическое давление управления, последний находит я в положении равновесия, поскольку пояски 4 и 5перекрывают отверстия 24 и 25 сверлений 22и...
Устройство для стабилизации скорости перемещения носителя записи

Номер патента: 1174979
Опубликовано: 23.08.1985
Авторы: Бойко, Коротаев, Чиренко
МПК: G11B 15/46
Метки: записи, носителя, перемещения, скорости, стабилизации
...1. Выход выпрямителя 7 подсоединен к входу интегратора 4. Вход допол нительного преобразователя 8 частота - напряжение подсоединен к выходу выпрямителя 7, Выход дополнительного преобразователя 8 частота - напряжение подключен к первому входу формирователя 11 импульсов, подсоединенного вторым входом к выходу регулируемого резистивного делителя стабилизированного питания, состоящего из переменного резистора 12, включенного между шиной 13 стабилизированного напряжения и общей шиной 14. Выход формирователя 11 импульсов соединен с электродвигателем 2, кинематически соединенным с носителем записи.Триггерный элемент 6 устройства выполнен в виде триггера 15 Шмитта, инвертора 16 и электронного коммутатора 17, подключенного выходом посредством...
Устройство для управления скоростью перемещения подвижных компонентов оптических систем

Номер патента: 375612
Опубликовано: 01.01.1973
Автор: Коварска
МПК: G03B 3/12
Метки: компонентов, оптических, перемещения, подвижных, систем, скоростью
...этогопотенциометра, сравнивается с напряжениемтахогенератора 2 обратной связи и подаетсяна вход усилителя 4, Вместе с перемещением10 подвионых компонентов системы перемещается движок потенциометра 5. При подходе кодному из крайних положений шкалы фокусных расстояний движок потенциометра 5 такое достигает одного из своих крайних поло 15 оений. Между средней точкой потенциометра5 и его движком возникает напряоение, достаточное для срабатывания поляризованного элемента (например, поляризованного реле б). Величина этого напряжения, а, следо 20 вательно, и момент срабатывания реле устанавливается сопротивлением 7. Полярность наобмотке реле определяется направлением перемещения оптических компонентов, направлением вращения потенциометра 5...
Устройство для управления скоростью перемещения магнитной ленты

Номер патента: 949711
Опубликовано: 07.08.1982
Авторы: Афанасьев, Шкуратиков
МПК: G11B 15/46
Метки: ленты, магнитной, перемещения, скоростью
...фазовые компараторы 1 О и 11, подсоединенные к выходу датчика 5 скорости перемещения магнитной ленты 6, делитель 12 частоты с переменным коэффициентом деления, вход которого соединен с генератором 4 импульсов опорной частоты, и первый и второй преобразователи 13 и 14 импульсов, подключенные выходами к входам реверсивного усилителя 7 мощности, Выходы делителя 12 частоты с переменным коэффициентом деления подключены к входам блока 15 сдвига фазы импульсов, подсоединенного выходами к входам первого и второго коммутаторов 16 и 1. Выходы первого и второго коммутаторов 16 и 17 соединены через первый и второй дополнительные фазовые компараторы 1 О и 11 с входами соответственно первого и второго преобразователей 13 и 14 импульсов,В...
Предыдущий патент: Устройство для программного управления процессом обработки изделий микроэлектроники
Следующий патент: Устройство для разгона и торможения электропривода
Случайный патент: Ультразвуковой преобразователь