Устройство для программного управления процессом обработки изделий микроэлектроники
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1386962
Авторы: Грудинин, Карманов, Присмотров, Хорошавин
Текст
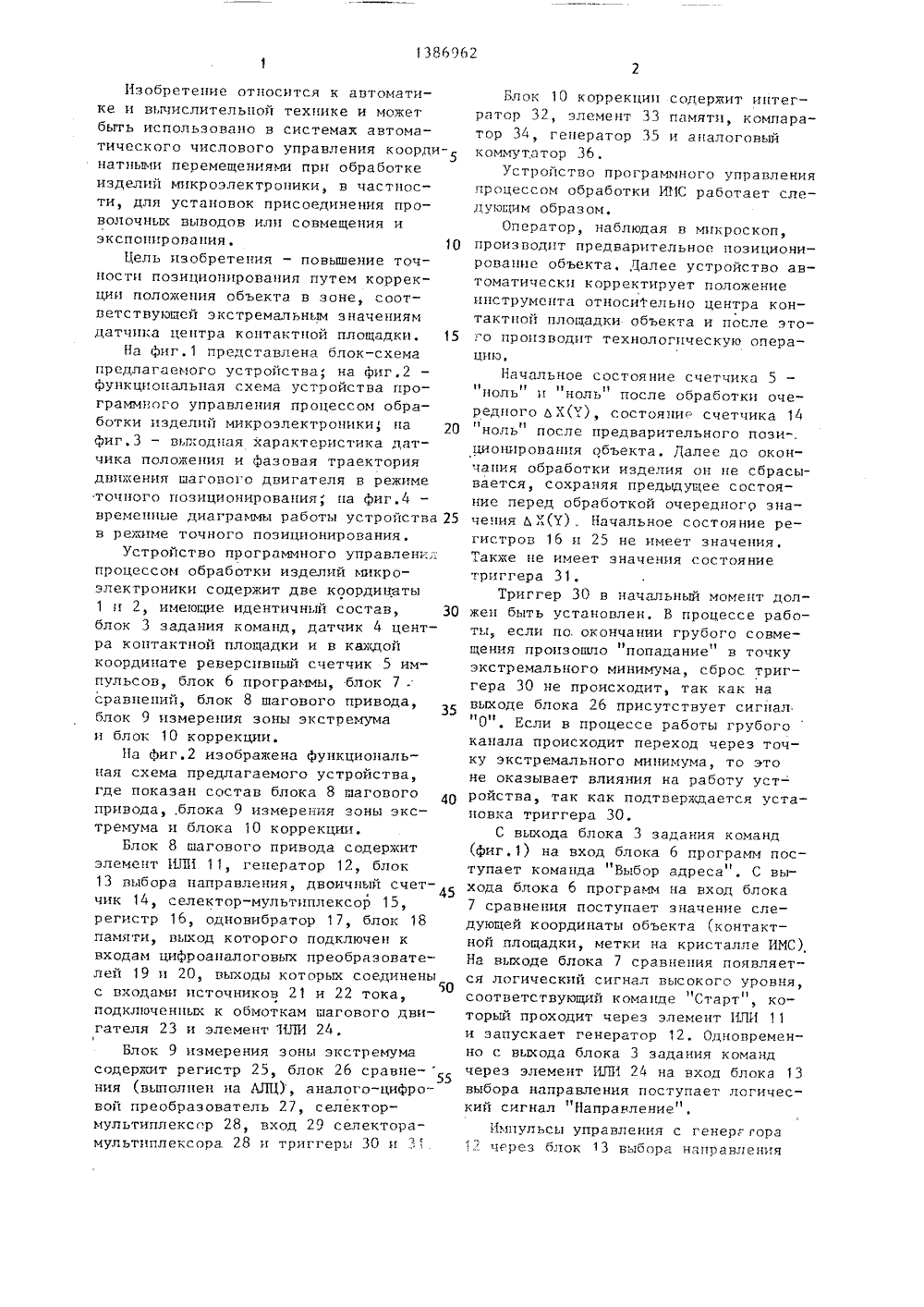
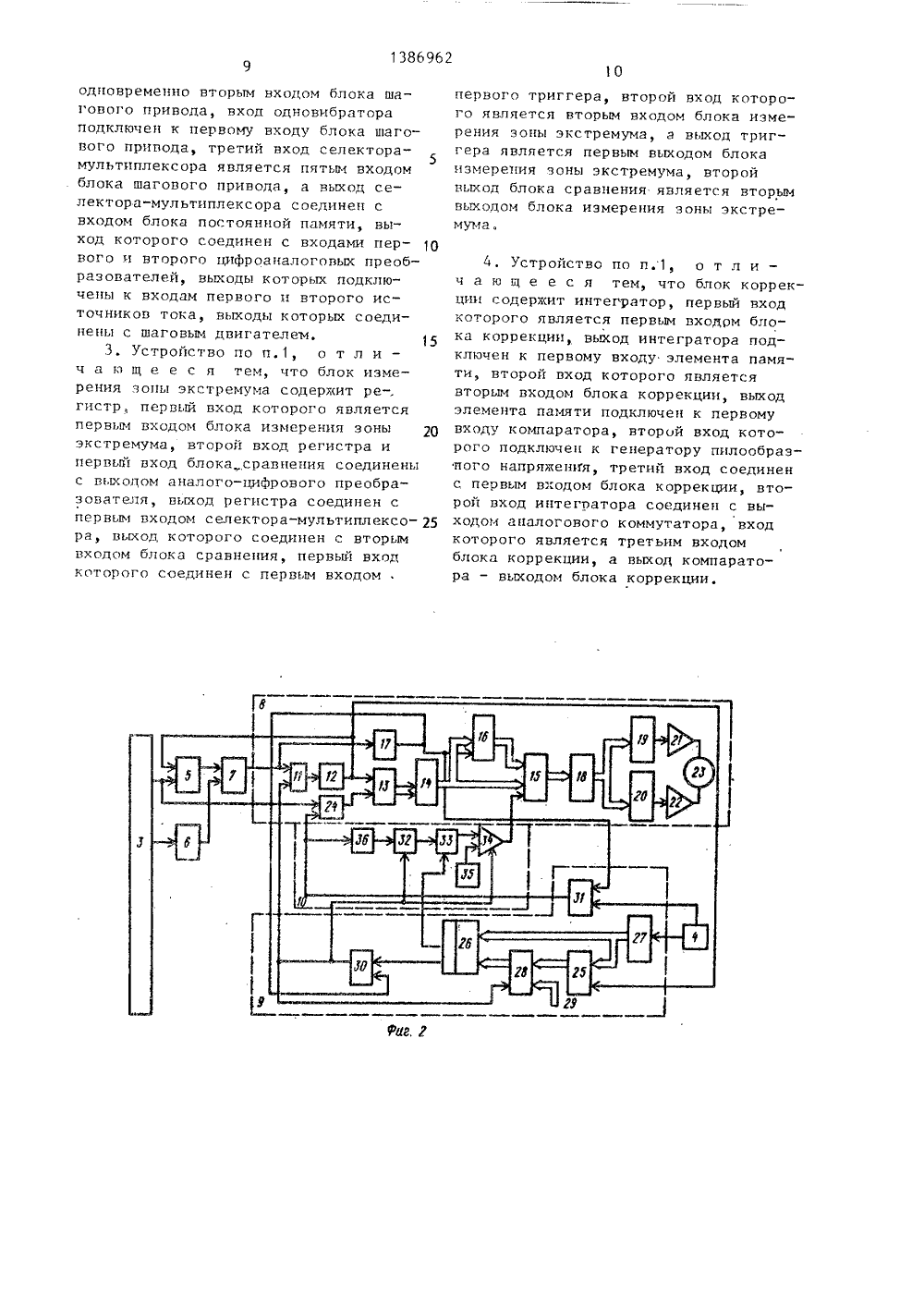
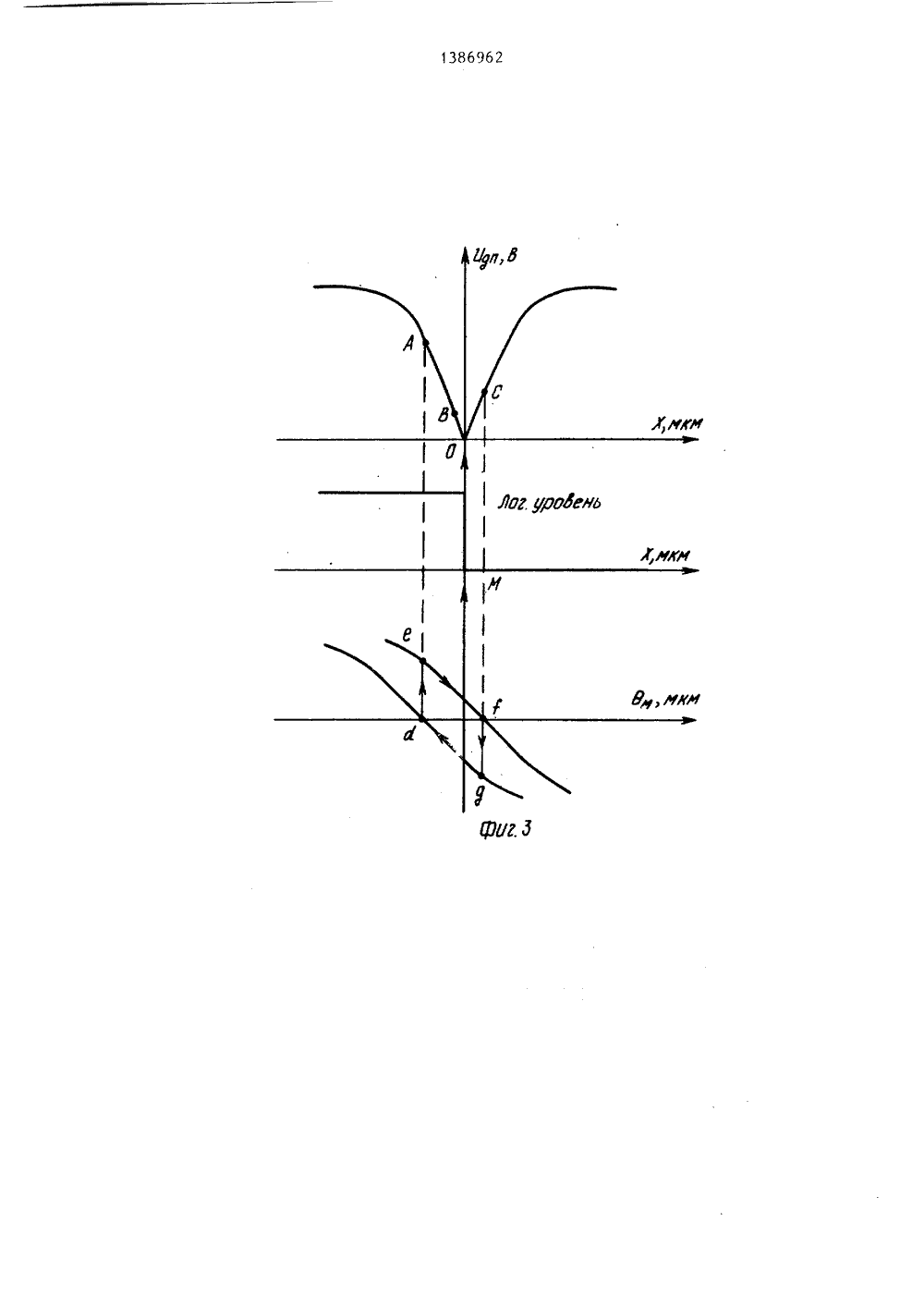
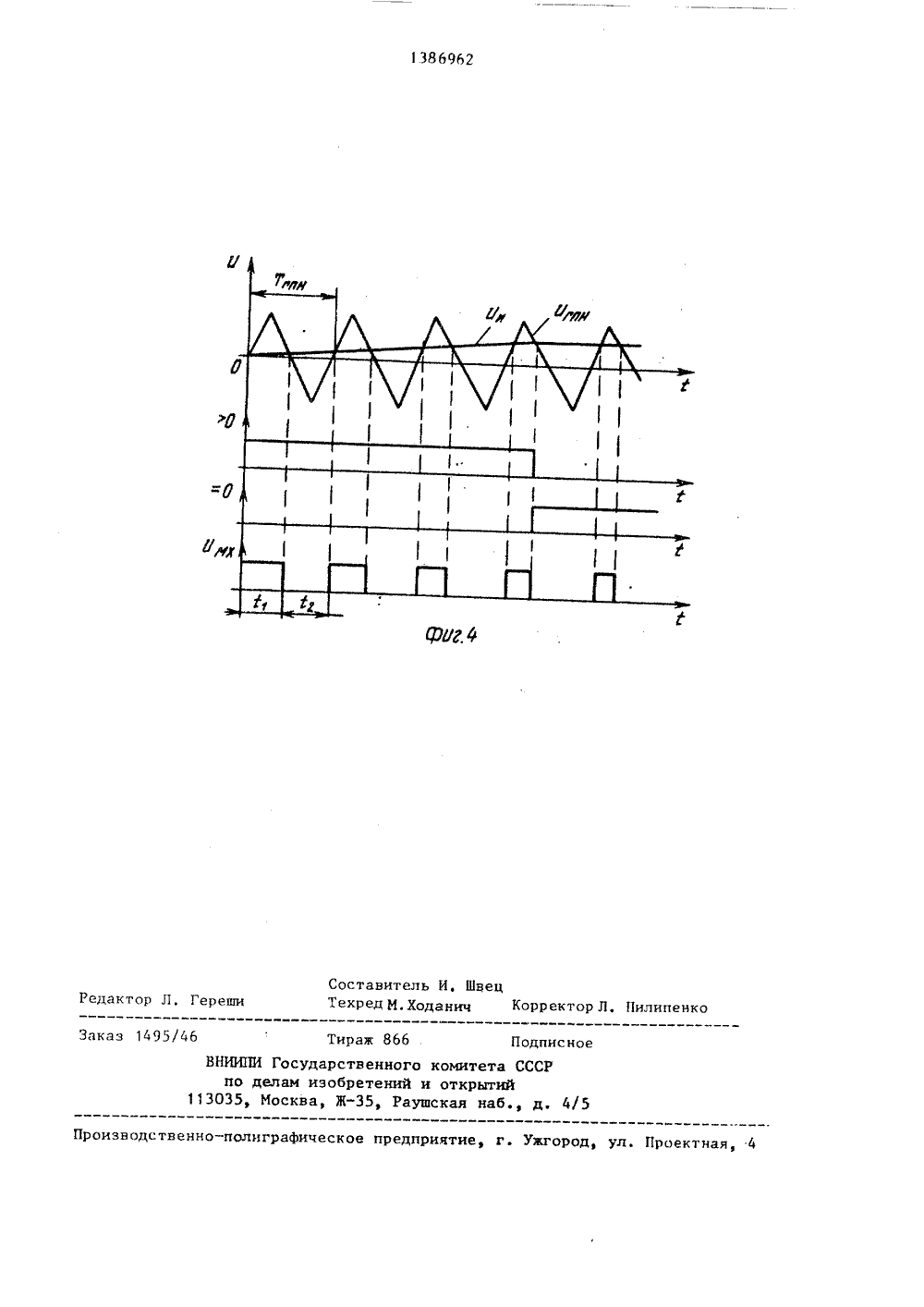
/18 4 дробньгх шаследуюцимления шага ах зоны э ереключен стремума с по ем режима дро т точную кор- ехнологическог еспечив ктировку положения нструмепт актпой пл относител ептра ко Ошибка п цадки изд пня опред и дрейфом ется раэрядивиониро остью АЦ уля операционф-лы, 4 еи,лит э.п ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ ОПИСАНИЕ ИЗОБ К АВТОРСКОМУ СВИДЕТЕПЬСТ(71) Кировский политехнический институт(56) Промышленные работы для миниатюрньг:. изделий, Под ред. В.Ф. Паньгица.- М.: Машиностроение, 1985,с,64-65, рис,2.40,Авторское свидетельство СССРй 1151928, кл . С 05 В 19/ 18, 1982,(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОБРАБОТКИ ИЗДЕЛИЙМИКРОЭЛЕКТРОНИКИ(57) Изобретение относится к автоматике и вычислительной технике и может4быть использовано в системах автоматического числового управления координатными перемецениями при обработкеизделий микроэлектроники. Цель изоб,ЯО 1386962 А 1 ЕТЕНИЯ ц; ретения - повышение точности позиционирования путем коррекции положенияобъекта в зоне соответственно экстремальным значениям датчика центра контактной плоцадки. Устройство для программного управления процессом .обработки изделий микроэлектроники содержит блок 3 задания команд, реверсивный счетчик 5, блок 7 сравнения,блок 6 программ, датчик 4 центра контактной плоцадки, блок 8 шаговогопривода, блок 9 измерения зоны экст-,ремума, блок 10 коррекции. Данноеустройство при помоци измерения вИзобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления коорди натными перемещениями при обработкеизделий микроэлектроники, в частности, для установок присоединения проволочных выводов или совмещения иэкспонирования. 10Цель изобретения - повышение точности позициоцировация путем коррекции положеция объекта в зоне, соответствуюшеи экстремальным значениямдатчшса центра контактной площадки. 15На фиг.1 представлена блок-схемапредлагаемого устройства; на фиг,2функциональная схема устройства программного управления процессом обработки изделий микроэлектроцики, ца 20фиг.3 - вьгходцая характеристика датчика положения и фазовая траекториядвисения шагового двигателя в режиметочного позициоцировация," иа фиг,4времеццые диаграммы работы устройства 25в режиме точного позиционирования.Устройство программного управленк;.:процессом обработки иэделий микроэлектроники содержит две координаты1 к 2, имеющие идентичный состав, 30блок 3 задания команд, датчик 4 центра контактной площадки и в каждойкоординате реверспвцый счетчик 5 импульсов, блок 6 программы, блок 7 .сравнении, блок 8 шагового привода,блок 9 измерения зоны экстремумаи блок 10 коррекции.На фиг,2 изображена функциональная схема предлагаемого устройства,где показан состав блока 8 шагового 40приводаблока 9 измерения зоны экстремума и блока 10 коррекции.Блок 8 шагового привода содеряситэлемент ИЛИ 11, генератор 12, блок13 выбора направления, двоичный счетчик 14, селектор-мультиплексор 15,регистр 16, одновибратор 17, блок 18памяти, выход которого подключен квходам цифроаналоговых преобразователей 19 и 20, выходы которых соединены50с входами источников 21 и 22 тока,подключенных к обмоткам шагового двигателя 23 и элемент ИЛИ 24,Блок 9 измерения зоны экстремумасодержит регистр 25, блок 26 сравне- .ния (выполцец ца АЛЦ), аналого-цифровой преобразователь 27, селектормультиплексор 28, вход 29 селекторамультиплексора 28 и триггеры 30 и 3 Блок 10 коррекции содержит ицтег -ратор 32, элемент 33 памяти, компаратор 34, генератор 35 и ацалоговыйкоммутатор 36,Устройство программного управленияпроцессом обработки ИИС работает следующим образом,Оператор, наблюдая в микроскоп,производит предварительное позиционирование объекта, Далее устройство автоматическц корректирует положение инструмента относительно центра контактной площадки объекта и после этого производит технологическую операциюНачальное состояние счетчика 5нольи "ноль после обработки очередного ь Х(с), состояние счетчика 14Рноль после предварительного пози-.ционирования объекта. Далее до окончания обработки изделия он це сбрасывается, сохраняя предыдущее состояние перед обработкой очередкогд значения Ь Х(У) . Начальное состояние регистров 16 и 25 не имеет значения.Такясе це имеет значения состояниетриггера 31.Триггер 30 в начальный момент должен быть установлен. В процессе работы, если по. окончании грубого совмещения произошло попадание в точкуэкстремального минимума, сброс триггера 30 не происходит, так как навыходе блока 26 присутствует сигнал"0", Если в процессе работы грубогокакала происходит переход через точку экстремального минимума, то этоне оказывает влияния ка работу устройства, так как подтверждается установка триггера 30,С выхода блока 3 задания команд(фиг, 1) на вход блока 6 программ поступает команда "Выбор адреса". С выхода блока 6 программ на вход блока7 сравнения поступает значение следующей координаты объекта (контактной площадки, метки на кристалле ИМС),На выходе блока 7 сравнения появляется логический сигнал высокого уровня,соответствующий команде Старт , который проходит через элемент ИЛИ 11и запускает генератор 12. Одновременно с выхода блока 3 задания командчерез элемент ИЛИ 24 на вход блока 13выбора направления поступает логический сигнал Направление,Импульсы управления с гекерг гора 12 через блок 13 выбора направленияподаются либо ца вход "+1" счетчика 14, либо на вход "-1" в зависимости от требуемого направления движения, При этом должно соблюдаться условие для частоты генератора Г,Г,где Г - частота приемистости шагового двигателя 23, Двоичное число, проходя через селектор-мультиплексор 15, находящийся в состоянии передачи дацных по первому входу при отсутствии сигнала компаратора 34, образует очередной адрес выборки данных.В блоке 18 памяти записаны синускосицусцые зависимости (для двухфаз ного варианта ыагового двигателя 23) или результаты предварительной калибровки -го дроблецого ыага шагового двигателя 23. Числа, снимаемые с постоянного запоминающего устройства 18 по очередному адресу выборки, преобразуются в аналоговые сигналы задания циФроаналоговыми преобразователями 19 и 20; Эти сигналы определяют уровни тока, поддерживаемые источниками 25 21 и 22 тока в обмотках шагового двигателя 23, необходимые для реализации режима дробления шага последнего. Таким образом, происходит совмещение инструмента и очередной координаты объекта с точностью, определяемой степенью дробления шага и параметрами нагрузки, В это время на вход счетчика 5 поступают импульсы генератора 12. Как только значения текущей и адресной координаты на входе блока 7 сравнения станут равны между собой, ца выходе блока 7 сравнения появится логический сигнал низкого уРовня 40 "Стоп". На этом процесс работы грубого канала системы управления заканчивается.С появлением сигнала Стоп одно- вибратор 17, реагирующий на задний 45 Фронт сигнала блока 7 сравнения, выдает сигнал, записывающий состояние двоичного счетчика 14 в регистр 16. Предположим, что шаговый двигатель 23 остановился в точке А (фиг,3), Тогда в регистр 16 записывается двоичное число, соответствующее адресу именно этой точки. Одновременно с этим сигнал одновибратора 17 записывает в триггер 31 состояние знакового выхода датчика и центра контактной55 площадки и сбрасывает триггер 30, Так как триггер 30 сброшен, то он разрешает через элемент ИЛИ 11 работу генератора 12 и соответствеццо двоичного счетчика 14, цо в направлении, определяемом состоянием триггера 31, сигнал которого подается через элемент 11 ЛИ ИЛИ 24 на вход блока 13 выбора на -правле ция,В рассматриваемом случае дальнейшеедвижение продолжается в прежнем направлении к точке В (фиг.З), В процессе движения анапоговьп сигнал свыхода датчика 4 центра контактнойплощадки все время преобразуется аналого=цифровым преобразователем 27 вдвоичное число, которое с приходомочередного импульса генератора 12фиксируется в регистре 25, Так кактриггер 30 бьи сброшен, он раэреыаетработу селектора-мультиплексора 28в режиме передачи данных с регистра25 на второй вход блока 26 сравненияУчитывая, что текущее состояние выхода аналого-цифрового преобразователя27 непосредственно поступает ца пер- .вьп вход блока 26 сравнения, в последнем постоянно происходит сравнение текущего значения сигнала датчика 4.центра контактной площадки с предыдущим.При движении шагового двигателя23 от точки А к точке В и затем кточке С в последней на выходе блока26 сравнения появляется сигнал "0"так как потенциал сигнала датчика 4центра контактной площадки в точке Свьппе, чем в точке В. Этот сигнал уста -навливает триггер 30, вследствие чегоостанавливается генератор 12, а вдвоичном счетчике 14 фиксируется адрес точки С. Одновременно селектормультиплексор 28 этим же сигналомпереводится в состояние передачи числа Н соответствующего экстремальному минимуму сигнала датчика 4 центра контактной площадки на второй входблока 26 сравнения. Далее триггер 30разрешает работу интегратора 32 икомпаратора 34 блока 10 коррекции(канала точного позиционирования).Код Ица вход мультиплексора28 подается либо вручную с помощьютумблеров, либо с помощью перемычек,соединяющих очередной вывод второговхода селектора-мультиплексора 28 сцулевьил проводом либо с источникомпитания через балластный резистор.При этом соединение с нулевым проводом означает нуль в этом разрядепитания через балластцьп резисторединицу, Приведенное выше разъяснение относится к конкретной реализации предлагаемого устройства и невлияет ца принцип его работы.Первьп вход блока 26 является входом сравнения, а второй вход является опорным, В блоке 26 постояннопроисходит сравнение текущего значения преобразованного аналого-цифро -вых преобразователей 27 в двоичньпкод сигнала датчика 4 центра контактной площадки с предыдущим значением,хранимым в регистре 25. При работеустройства в режиме точного позиционирования в блоке 26 происходитсравнение текущего значения сигналадатчика 4 с числом Г 1 , приходящимца его второй вход через селектормультиплексор 28. При этом выход регистра 25 отключен от второго входаблока 26 селектором-мультиплексором28. Второй выход блока 26 "-0" служит для фиксации в элементе 33 памяти текущего значения интегратора 32при достижении зоны экстремальногоминимума, а первый выход "0" служитдля сброса триггера 30, который управляет работой интегратора 32, компаратором 34 и генератором 12 в режиме точного позиционирования,В зависимости от состояния триггера 3 1, а следовательно, и предисторииначала движения аналоговьп коммутатор36 подключает на вход интегратора 32либо положительное, либо отрицательное напряжение, Это напряжение интегрируется и через элемент 33 памяти.поступает на вход сравнения компаратора 34 в виде напряжения Б (фиг,4),где сравнивается с пилообразным напряжением У снимаемым с генератора 35.В результате сравнения компаратор 4534 выдает импульсы управления ПС изменяющейся скважностью на входуправления селектора-мультиплексора15, который поочередно подключает навход блока 18 памяти либо выход регистра 16, либо выход двоичного счет 50чика 14, Таким образбм, в течениевремени с (фиг.4) к адресному входупостоянного запоминающего устройства18 подключен адрес точки С (Фиг.З)в течение времени с, - адрес точки А,а шаговьп двигатель 23 описывает фазовую траекторию б-е-Е-д-й - (Фиг,З).Так как участок Фазовой траектории е-Г соответствует движению от точкиА к точке С и времени с , а участок-д - движению от точки С к А и времени г то с изменением напряженияБинтегратора 32 происходит смеще -ние положения шагового двигателя 23в сторону точки С до тех пор, пока свыхода блока 26 сравнения не появитсясигнал =0, соответствующий попаданию в точку экстремума, Этот сигналфиксирует состояние интегратора 32 вэлемент 33 памяти до прихода новогозадания с блока 3 задания команд.Состав датчика 4 центра контактнойплощадки предлагаемого устройства такой же, как и у известного устройства. Оц содержит две координаты, четыре Фотоприемника. Каждая координатасостоит из последовательно соединенных дифференциального усилителя идетектора, ком 1 таратора, вход которогосоединен с выходом диФФеренциальногоусилителя. Исключаются компараторы,подключенные своими входами к выходамдетекторов, Сигнал, снимаемый с выхода детектора, образует аналоговьпвыход датчика 4 центра контактнойплощадки, а сигнал, снимаемый с выхода компаратора, образует знаковый выход датчика 4 центра контактной площадки,Период сигнала Т, генератора 35(Фиг 4) выбирается таким образом,чтобы при максимально возможном измерении расстояния между точками А и С(Фиг,З), шаговьпт двигатель .23 успевал описать траекторию д-с-Г-,Время движения с, =с при скважности импульсов компаратора 34, равной0,5, определяется из уравненияб 9 о с 19+о -- + В = зхп (-9Оснгде 6 - угол поворота шагового двигателя 23,с,:я,с - относительное время И,= -- частота собственных колебаний двигателя,- безразмерный коэффициентвнутреннего демпфирования,относительная нагрузка- шаг задания, соответствующий углу между точками,В случае остановки шагового двигагеля 23 в точке С в регистр 16 записывается двоичное число, соотве-ствующее адресу этой точки, а сигналодновибратора 17 записывает в триггер31 уже другое состояние знаковоговыхода датчика 4 центра контактнойплощадки (фиг,3), поэтому движениепри измерении зоны экстремума происходит в обратном направлении - отточки С к точке А. При попадании вточку А на выходе блока 26 сравненияпоявляется сигнал "0", счетчик 1410останавливается, запоминая адрес точки А и триггер 30 разрешает работуканала точного позиционирования. Процесс точного позиционирования аналогичен рассмотренному выше. 15КоэфФициент дробления шага двигателя 23 должен выбираться таким образом, чтобы в зоне экстремума датчика 4 центра контактной площадки укладывалась по меньыей мере 3-4 дробленых шага для обеспечения возможностиизмерения зоны экстремума,Таким образом, устройство дляпрограммного управления процессом обработки изделий микроэлектроники при 25помоци измерения в дробных шагахзоны экстремума с последующим переключением режима дробления шага обеспечивает точную корректировку положения технологического инструмента относительно центра контактной площадки(или метки) изделия микроэлектроники,Ошибка позиционирования определяетсяне величиной шага шагового двигателя,а разрядностью аналого-цифрового преобразователя и дрейфом нуля операци 35онных усилителей. Формула изобретения401. Устройство для программного чправления процессом обработки изделий микроэлектроники, содержащее блок задания команд, датчик центра контактной площадки и в каждой координа те реверсивный счетчик импульсов, выход которого подключен к первому вхагду блока сравнения, соединенного вторым входом через блок программ с первым выходом блока задания команд, первьп вход реверсивного счетчика импульсов соединен с вторым выходом блока задания команд, выход блока сравнения подключен к первому входу блока шагового привода, а второй вход каждого блока шагового привода соединен с вторым выходом блока задания команд, первый выход блока шагового привода каждой координаты соединен с вторым входом реверсивного счетчика, о т л и ч а ю щ е е с я тем, что, с целью повышения точности по - эиционировапия путем коррекции положения объекта в зоне, соответствующей экстремальным значениям датчика центра контактной плоцадки, в него введены блок коррекции и блок измерения зоны экстремума, а блок ыагового привода выполнен с электрическим дроблением нага, первый выход блока измерения зоны экстремума соединен с третьим входом блока нагового привода и с первым входом блока коррекции, второй выход - с вторым входом блока коррекции, третий выход - с третьим входом блока коррекции и с четвертым входом блока нагового привода, выход блока коррекции подключен к пятому входу блока шагового привода, первьп выход которого соединен с первым входом блока измерения зоны экстремума, второй выход блока шагового привода соединен с вторым входом блока измерения зоны экстремума, третий и четвертый входы которого соединены с первым и вторым выходами датчика центра контактной площадки, третий и четвертый выходы которого подключены к блоку измерения эоны экстремума другой координаты.2. Устройство по п.1, о т л ич а ю ц е е с я тем, что блок шагового привода содержит первый элемент ИЛИ, соединенный своим первым входом с первым входом блока шагового привода, второй вход первого элемента ИЛИ соединен с третьим входом блока шагового привода, а выход первого элемента ИЛИ соединен с входом генератора, выход которого является первым выходом блока нагового привода и одновременно связан с первым входом блока выбора направления, второй вход которого соединен с выходом второго элемента ИЛИ, а выходы подключены к входам реверсивного двоичного счетчика, первьп вход второго элемента ИЛИ является вторым входом блока шагового привода, а его второй вход - четвертым входом блока нагового привода, выход реверсивного двоичного счетчика соединен с первым входом селектора - мультиплексора и с первыми входамирегистра, выход которого подключен к второму входу селектора в мультиплексора, а второй вход регистра соединен с выходом одчовибратора, являющегосяодцовремеццо вторым входом блока шагового привода, вход одновибратора подключен к первому входу блока шагового привода третий вход селектораЭ5 мультиплексора является пятым входом блока шагового привода, а выход селектора-мультиплексора соединен с входом блока постоянной памяти, выход которого соединен с входами первого и второго цифроаналоговых преобразователей, выходы которых подключены к входам первого и второго источников тока, выходы которых соединены с шаговым двигателем,3. Устройство по п.1, о т л и ч а ю щ е е с я тем, что блок измерения зоны экстремума содержит ре-. гистр, первый вход которого является первым входом блока измерения эоны 2 О экстремума, второй вход регистра и первый вход блока, сравнения соединены с выхопом аналого-циФрового преобразователя, выход регистра соединен с первым входом селектора-мультиплексо ра, выход которого соединен с вторым входом блока сравнения, первый вход которого соединен с первым входом первого триггера, второй вход которого является вторым входом блока измерения зоны экстремума, а выход триггера является первым выходом блокаизмерения зоны экстремума, второйвыход блока сравнения является вторымвыходом блока измерения зоны экстремума. 4. Устройство по п.1, о т л и ч а ю щ е е с я тем, что блок коррекции содерлхит интегратор, первый вход которого является первым входрм блока коррекции, выход интегратора подключен к первому входу элемента памяти, второй вход которого является вторым входом блока коррекции, выход элемента памяти подключен к первому входу компаратора, второй вход которого подключен к генератору пилообразного напрялхеция, третий вход соединен с первым входом блока коррекции, второй вход интегратора соединен с выходом аналогового коммутатора, вход которого является третьим входом блока коррекции, а выход компаратора - выходом блока коррекции.386962 Составитель И, ШвецТехред М,Ходанич Корректор Л, Пилипенко Редактор Л, Гереши Заказ 1495/46 Тираж 866 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий113035, Москва, Ж, Раушская наб д, 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
4097681, 25.07.1986
КИРОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ГРУДИНИН ВИКТОР СТЕПАНОВИЧ, ХОРОШАВИН ВАЛЕРИЙ СТЕПАНОВИЧ, ПРИСМОТРОВ НИКОЛАЙ ИВАНОВИЧ, КАРМАНОВ АНАТОЛИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/40
Метки: микроэлектроники, программного, процессом
Опубликовано: 07.04.1988
Код ссылки
<a href="https://patents.su/8-1386962-ustrojjstvo-dlya-programmnogo-upravleniya-processom-obrabotki-izdelijj-mikroehlektroniki.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления процессом обработки изделий микроэлектроники</a>
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Устройство для регистрации времени входа и выхода

Номер патента: 963026
Опубликовано: 30.09.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...впемени входаи выхода содержит датчики.1 направления, 55блок 2 считывания, элементы И 3 и 4, компараторы 5, задатчики 6 адреса, элементы ИЛИ7 и 8, блок 9 контроля кода, блок 1 О управ. ления, счетчик 11 импульсов, блок 12 регист. рации, датчик 13 времени и пульт 4 управления.При наличии заявки с любого блока 2 считывания через первый элемент ИЛИ 7 запускается блок 10 управления, который сЬормирует1код текущего адреса блока 2 считывания и выдает его на компараторы 5. В задатчиках 6 адресов блоков 2 считывания при монтаже устройства заложены их порядковые номера. Комнаратор 5, укоторого поступивший код совпал с кодом задатчика 6 алреса, открывает элементы И 3 и 4. Инфоомация, считываемая с жетона - пропуска, ппедставляет собой...
Устройство для управления включенными параллельно по входу и выходу n статическими преобразователями частоты

Номер патента: 1665479
Опубликовано: 23.07.1991
Авторы: Артюхов, Величкина, Желев, Серветник, Томашевский
МПК: H02M 5/44
Метки: включенными, входу, выходу, параллельно, преобразователями, статическими, частоты
...случае появляется сигнал логической единицы:на выходе компаратора 16 и происходит подача импульса на вычитающий вход счетчика 31. Соответствующий выход логического блока 26 обнуляется, что приводит к выключению преобразователя.После каждой выдачи команды на вклю чение или отключение преобразователей производится повторный опрос компараторов 15 и 16, Для обеспечения устойчивой работы системы этот опрос производится с некоторой задержкой, определяемой эле ментом 25. Если за это время какой-либо из компараторов не изменил свое состояние, то происходит выдача команды на включение (или отключение) еще одного преобразователя. Импульсы на первый 27 и второй 28 входы логического блока 26 поступают до тех пор, пока будет выполняться одно из...
Устройство для контроля входа и выхода рабочих и служащих

Номер патента: 615514
Опубликовано: 15.07.1978
Авторы: Козинцев, Морозов, Покидаев, Шаровар
МПК: G07C 1/10
Метки: входа, выхода, рабочих, служащих
...открывается сигналом, вырабатываемым формирователем 13 опроса регистра анализа, Появившийся сигнал на ее выходе проходит через элемент ИЛИ 25 на формирователе 8 выходной информации, который под действием этого сигнала вырабатывает ответную информацию, разрешающую вход на объект по шйне 12, й сигйал 5 10 15 20 25 30 35 40 45 50 55 60 65 на элемент И 40. Элемент И 40, подготовленный по другому входу блоком 1 приема команд, срабатывает и появившийся сигнал на его выходе поступает через элемент ИЛИ 42 на элементы И 30, 31 блока 10 корректива и через элемент ИЛИ 6 на блок памяти 9 и второй формирователь 18 сигналов управления блоком памяти, В результате избирательная схема 31 выбранного дешифратора 4 информативного узла 27 срабатывает...
Устройство для регистрации входа и выхода

Номер патента: 773660
Опубликовано: 23.10.1980
Авторы: Варламов, Дубинин, Подкопаев, Прозоров, Романов, Солдатин
МПК: G07C 9/00
Метки: входа, выхода, регистрации
...блоком 9 контроля на нечет и контрольную сумму, который в свою очередь соединен с блоком 10 памяти емкостью 4 кбайта. Блок 10 памяти соединен с блоком 11 согласования с вычислительной машиной, через который осуществляется передача массива информации на внешнее устройство выводов вычислительной машины. Блок 8 селекции, блок 9 контроля, блок 10 памяти и блок 1 1 согласования с вычислительной машиной подключен к блоку 12 управления, предназначенному для управления всеми операциями передачи информации и выполненному в виде управляемого коммутатора.Между блоками 12 управления и блоком 8 селекции включен блок 13 регистрации времени, предназначенный для подачи кода текущего времени и включения и выключения всего устройства по заранее заданной...
Предыдущий патент: Устройство для управления объектом энергосистемы
Следующий патент: Система числового программного управления
Случайный патент: Устройство для настройки сборных резьбовых фрез