Способ испытания устройств диагностики подшипников качения и установка для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1375966
Авторы: Басенко, Васильев, Заозерский, Миронович, Нежданов, Шарафудинов, Явленский

Текст
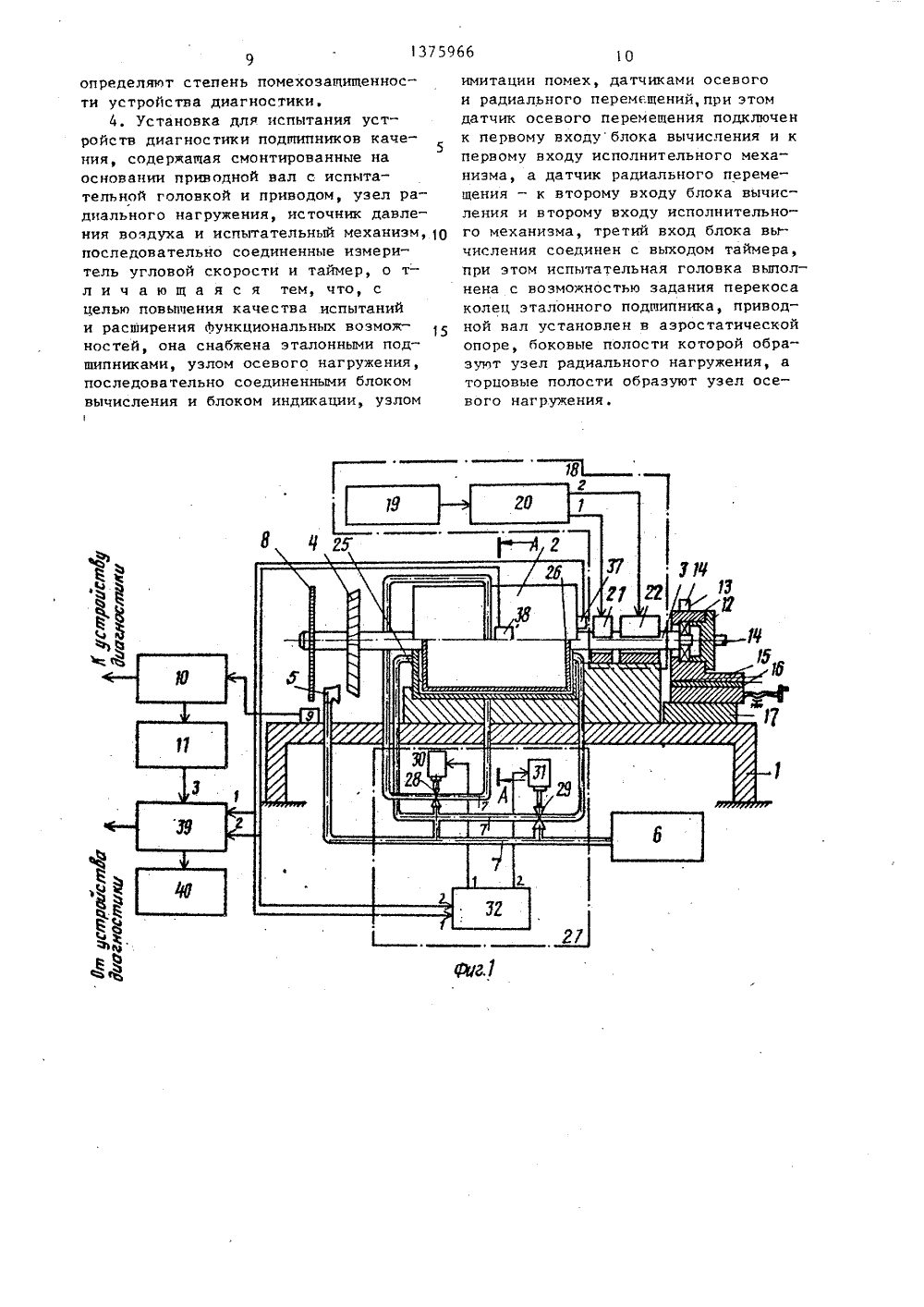
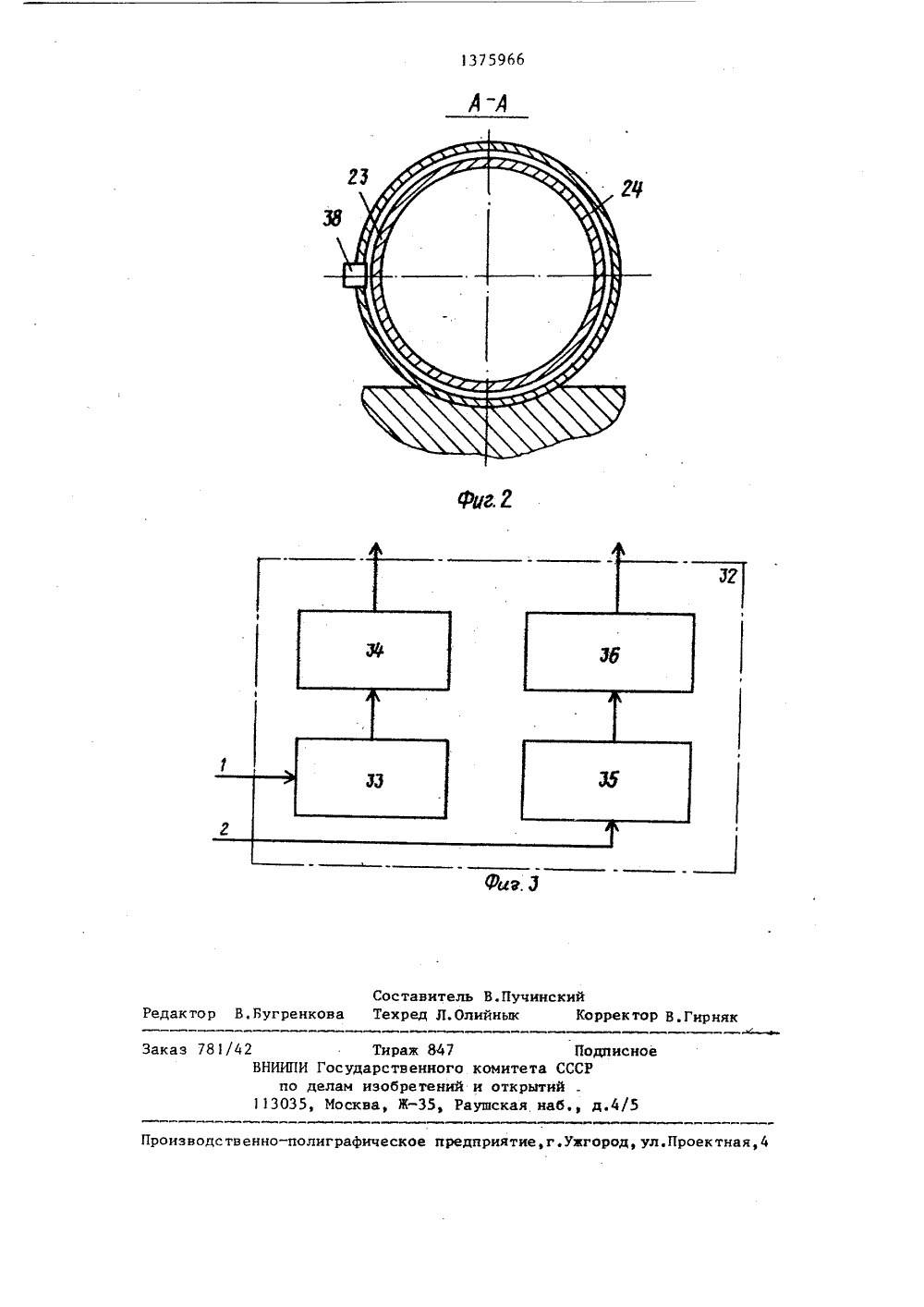
СОЮЗ СОВЕТСНИСО.ИАЛИСТИЧЕСНРЕСПУБЛИК 9)75966 51)4 С 01 М 1 Яг,фа,и . .,т7 ИОАН ИЕ РЕТЕН ТБВ,л:,31 ЕЛЬСТ ВТОРСКОМУ институт авиацинияВ.П.Миронович,Л.Васильев,Басенко)ство СССР 04, 1979. с ОСУДАРСТВЕННЫИ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(54) СПОСОБ ИСПЫТАНИЯ УСТРОЙСТВ ДИАГНОСТИКИ ПОДЯИПНИКОВ КАЧЕНИЯ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к подшипниковой промышленности, а именно кдиагностике подшипников. Цель изобретения - повышение качества испытаний устройств диагностики подшипников качения и расширение Функциональных возможностей. В эталонныйподшипник вводят вид и величину деФекта сборки, изготовления и эксплуатации и задают режим его работы.Затем определяют деФект устройствомдиагностики, сравнивают с введеннымдеФектом и на основании этого определяют технические показатели устройства диагностики. Таким образом, можноопределить минимальную величину дефекта, которую регистрирует устройство диагностики, а также степень помехозащищеиности устройства диагностики. Установка содержит смонтированные на основании приводной вал с испытательной головкой и приводом, узелосевого и радиального нагружения, источник давления воздуха, исполнительный механизм, эталонные подшипники,блок вычисления, датчики осевого ирадиального перемещений, узел имитации помех, блок индикации, таймер иизмеритель угловой скорости. Установка позволяет оценивать эФФективность различных устройств диагностики, определять пригодность для эксплуатации вновь создаваемых образцови проверять устройства диагностики,находящиеся.в эксплуатации. 2 с. и2 з.п. Ф-лы. 3 ил, 1375966Изобретение относится к подшипниковой промышленности и мОжет быть преимущественно использовано для диагностики подшипников качения,1 елью изобретения является повышение качества испытаний и расширение функциональных возможностей.На фиг.1 представлена конструктивная схема установки; на фиг.2 - разрез А-А на фиг,1; на фиг.3 - схема блока управления шаговым приводом.Установка содержит основание 1, на котором установлена аэростатическая опора 2, несущая приводной вал 3. На 15 одном конце приводного вала 3 расположен привод, состоящий из турбины 4 и сопла 5, подключенного к источнику 6 давления воздуха трубопроводом 7.На этом же конце приводного вала 3 20 жестко закреплен диск 8, под которым на основании 1 укреплен электромагнитный датчик 9,подключенный к входу частотомера 10. Диск 8, электромагнитный датчик 9 и частотомер 10 обра зуют измеритель угловой скорости. Выход частотомера 10 подключен к таймеру 11. На другом конце приводного вала 3 расположена испытательная головка 12, с помощью которой крепится 30 наружное кольцо эталонного подшипника 13, Внутреннее кольцо последнего установлено на цапфе приводного вала 3.На испытательной головке 12 укреплены вибропреобразователи 14 испытуемого устройства диагностики. Испытательная головка 12 жестко закреплена на узле 15 осевого перемещения с возможностью установки между ними клиновидной прокладки 16 для задания угла 40 перекоса наружного кольца эталонного подшипника 13. Узел 15 осевого перемещения имеет возможность движения вдоль оси приводного вала 3 и установлен на узле 17 радиального переме щения, который укреплен на основании 1 с возможностью осевого перемещения.Установка снабжена узлом 18 имита-. ции помех, включающего в себя последовательно соединенные блок 19 памяти, усилитель 20, а также подключенные к первому и второму выходам усилителя 20 соответственно возбудители радиальной 21 и осевой 22 вибрации. Возбудители радиальной 21 и осевой 22 вибрации установлены на основании 1 с возможностью свободного вращения приводного вала 3 внутри них. Аэродинамическая опора 2 содержит первую 23 и вторую 24 боковыеполости и первую 25 и вторую 26 торцовые полости. Первая 23 и вторая 24боковые полости образуют узел радиального нагружения и через трубопровод 7 подключены в исполнительноммеханизме 27 к первому распределительному вентилю. Первая 25 и вторая26 торцовые полости образуют узелосевого нагружения и подключены квторому распределительномувентилю 29исполнительного механизма.Первый 28 и второй 29 распределительные вентили механически соединены соответственно с первым 30 ивторым 31 шаговым приводом, входы которых, в свои очередь, подключеныфкпервому и второму выходам блока 32управления шаговым приводом. Он содержит последовательно соединенныепервый преобразователь 33 код - число импульсов и первый коммутатор 34,а также последовательно соединенныевторой преобразователь 35 код - число импульсов и второй коммутатор 36.На аэростатической опоре 2 закреплены датчик 37 осевого перемещенияи датчик 38 радиального перемещенияи размещены соответственно у второйторцовой полости 26 и у второй боковой полости 24,Установка включает в себя такжепоследовательно соединенные блок 39вычисления и блок 40 индикации, приэтом первый вход блока 39 вычислениялодкличен к датчику 37 осевого перемещения, второй вход - к датчику 38радиального перемещения, третий вход -к выходу таймера 11, а четвертыйвход предназначен для подключения квыходу испытуемого устройства диагностики.Первый и второй входы блока 39вычисления подключены соответственнок первому и второму входам исполнительного механизма 27. Второй выходчастотомера 10 может быть подключенк устройству диагностики,Способ осуществляют следующим образом.От источника 6 давления воздухачерез трубопроводы 7 подают воздухв полости аэростатической опоры 2.Нацапфе приводного вала 3 с помощьюиспытательной головки 2 укрепляютэталонный подшипник 3. Используяузел 15 осевого перемещения, смещаютиспытательную головку 12 вдоль осив направлении аэростатической опоры 2, которая под действием приложенной к ней силы смещается в воздушном зазоре, При этом с дачика 37 осево 5 го перемещения цифровой сигнал, пропорциональный осевому перемещению аэростатической опоры 2, поступает на второй преобразователь 35 код - число импульсов блока 32 управления шаговым приводом. Тот, в свою очередь через второй коммутатор 36 управляет вторым шаговым приводом 31. При этом число оборотов, на которое поворачивается вал второго шагового привода 31, пропорционально величине сигнала на входе второго преобразователя 35 код - число импульсов и,следовательно, величине осевого перемещения аэростатической опоры 2Вал второго шагового привода 31 поворачивает второй распределительный вентиль 29 так, что давление воздуха Р, в первой торцовой полости 25 повышается, а давление Р во второй торцовой полости 26 25 понижается. При этом возникает сила осевого нагружения Г , определяемая разностью давления Р, - Ри которая воздействует на аэростатическую опору 2. Внутреннее кольцо эталонного подшипника 13 воспринимает осевую нагрузку Г и препятствует перемещению аэростатической опоры 2.Таким образом, смещая с помощью узла 15 осевого перемещения наружное кольцо эталонного подшипника 3 и из 35 меняя давление в первой 25 и второй 26 полостях, задают осевую нагрузку. Величину нагрузки контролируют по показателям блока 40 индикации, на который поступает из блока 39 вычисления сигнал о величине осевой нагрузки. Для определения величины осевой нагрузки на первый вход блока 39 вычисления от датчика 37 осевого пе ремещения подают сигнал задаваемого осевого перемещения. Блок 39 вычисления пересчитывает величину осевого перемещения 1, в величину осевой нагрузки Г, по тарировочной кривой Г= ч(1 О), где - функция, определяемая конструктивными параметрами аэростатической опоры 2 и исполнительного механизма 27. Точно таким же образом, используя узел 17 радиального перемещения, датчик 38 ради 55 ального перемещения, первый преобразователь 33 код - число импульсов, первый коммутатор 34, первый шаговый привод 30, первый распределительный вентиль 28 и изменяя давление в первой 23 и второй 24 боковых полостях аэростатической опоры 2, задают и контролируют радиальную нагрузку на эталонный подшипник 3,Регулируя положение сопла 5 относительно турбины 4, приводят во вращение приводной вал 3 и внутренне кольцо эталонного подшипника 13. Величину угловой скорости определяют с помощью измерителя угловой скорости: частотомер 10 подсчитывает число импульсов в единицу времени, которые наводятся в электромагнитном датчике 9 зубцами вращающегося диска 8.Затем укрепляют вибропреобразователь 14 испытуемого устройства диагностики на испытательной головке 12или непосредственно на наружном кольце эталонного подшипника 3. Если вустройстве диагностики используетсясигнал угловой скорости вращенияподшипника, то такой сигнал снимают свторого выхода частотомера 10. Далеедиагностируют эталонный подшипник 13с заранее известным дефектом с помощью испытуемого устройства диагностики в соответствии с инструкцией поэксплуатации устройства.Вероятность ошибки диагностирования Р, и вероятность правильногодиагностирования дефекта вида 1 определяют следующим образом.Пусть в качестве эталонных подшипников 13 используются подшипники,имеющие дефекты эксплуатации, например разрушенную смазку-дефект видаВ блоке 39 вычисления задаютчисло М, - количество эталонных подшипников 13, на которых испытывается устройство диагностики (М.= 25 -140 шт). Поочередно устанавливают всеИ. эталонных подшипников 13 в испьгтательную головку 12, задают режимих работы и определяют вид дефекта спомощью устройства диагностики. Приэтом на четвертый вход блока 39 вычисления из устройства диагностикипоступают результаты диагноза: г,подшипников имеют разрушенную смазку(дефект вида д); г,. подшипников имеют другой вид дефекта или отсутствиедефектов (дефект вида 1),При этом И = г+ гДалее блок 39 вычисления определяетвероятность ошибки диагностированиявида д по формуле1375966 5Г;Р - Л. (1)Ц. и,.и вероятность правильного диагностикрования дефекта видаг,5(2)Результаты вычисления отображаютсяна блоке 40 индикации,Для испытания устройства диагностики на другие виды дефектов используют эталонные подшипники 13 с дефектами эксплуатации: с микронеровностями беговых дорожек с разрушениями сепаратора, со сколами тел качения и5т.п., с дефектами изготовления: гранность и разноразмерность тел качения,отклонения внутреннего и наружногокольца правильной геометрической формы и т,п. С помощью клиновидной прокладки 16 можно задавать дефект сборки - перекос наружного кольца. Дляэтого ее монтируют между узлом 15осевого перемещения и испытательнойголовкой 12,Испытания устройства диагностикидля определения минимального регистрируемого дефекта производят следующим образом.В качестве эталонных подшипников13 берут подшипники, имеющие один30вид дефекта, например овальность на- .ружного кольца, и подобранные в партии, имеющие разные величины дефектов, например 0,3; 0,5; 1; 2,5 и4 мкм,В блок 39 вычисления задаютминимальную допустимую вероятность правильного диагностирования Р доп деФекта вида(овальность наружного кольца) . Затем проводят диагностирование партийэталонных подшипников 13, начиная стой, которая имеет наибольший дефект,При этом блок вычисления по формуле(2) определяет вероятность правильного диагностирования Р для каждойпартии и сравнивает ее с заданнойвероятностью Р; , . Результат срав допнения отображается на блоке, 40 индикации. Тем самым определяют тупартию эталонных подшипников З,длякоторой еще выполняется условиеР 1 довВеличину дефекта этой партии считаютминимальной величиной, регистрируемой устройством диагностики с вероятностью не ниже заданной.Введение узла 18 имитации помехпозволяет испытьвать устройства диагностики на помехозащищенность, В блоке 19 памяти задают вид помехи путем включения соответствующей записиосевой и радиальной вибрации, например зубчатого зацепления, Усиленноенапряжение с усилителя 20 подаетсяна возбудитель 22 осевой вибрации ивозбудитель 21 радиальной вибрации,которые возбуждают в приводном вале3 вибрацию путем взаимодействия магнитного поля с полем, наводимым вметалле приводного валаОсевая и радиальная вибрации через приводной вал 3 воздействуют наэталонный подшипник 13, создавая помехи устройству диагностики, которыеимитируют реальные условия эксплуатации подшипника в механизме. В блоке39 вычисления задают допустимую вероятность правильного диагностирования Р , , Проводят испытания устройствадиагностики с эталонными подшипниками 13, имеющими дефект видаПри этом блок 39 вычисления определяет вероятность правильного диагностирования Р по формуле (2) и сравнивает ее с Р,.. Результаты срав-нения отображаются на блоке 40 индикации,Затем с помощью усилителя 20 увеличивают величину вибрации и вновьпроводят испытание с эталонными подшипниками 13,Аналогичным образом повьппают уровень вибрации до тех пор, пока начинает выполняться условие Р,.; =Р ,.м доп.На усилителе 20 фиксируют этот уровень вибрации, Если он больше уровнявибрации в реальном механизме, тоделают вьвод о пригодности испытуемого устройства для диагностированияв процессе эксплуатации подшипников,установленных в механизме. Зафиксированный уровень вибрации отражаетстепень помехозащищенности устройствдиагностики. Использование таймера11 и блока 39 вычисления позволяетопределить среднюю оперативную продолжительность диагностирования ипродолжительность однократного диагностирования ; дефекта видаПри достижении заданной угловойскорости вращения приводного вала 3напряжением с первого выхода частотомера 1 О запускается таймер 1, который фиксирует время начала диагностирования С . Затем монтируют вибропреобразователи 14 на испытательнойголовке 12 и с помощью устройствадиагностики определяют все виды деФектов, которые позволяют диагностировать устройство.Далее демонтируют вибропреобразователи 14 и останавливают приводной5 вал 3, отодвинув сопло 5 от турбины 4. При снижении угловой скорости приводного вала 3 частотомер 10 останавливает таймер 11, который Фиксирует время окончания диагностирования Блок 39 вычисления по сигналам, поступающим из таймера 11, производит считывание моментов времени начала и окончания диагностирования и вычисляет продолжительность однократного диагностирования всех видов де- Фектов 25 1лп 9=1Одновременно в ходе диагностирования дефекта видаблок 39 вычисления определяет время между моментами пос тупления на его четвертый вход от устройства диагностики результатов диагноза дефекта вида -1 и результатов диагноза следующего по порядку дефекта вида1-1где с, - момент времени окончаниядиагностирования дефектавидамомент времени начала ди 1-1 40агностирования дефекта вида 1 х моменту времениокончания диагностированияпредыдущего дефекта вида1-1.45Величиныи . отображаются9на блоке 40 индикации.Предлагаемая установка позволяет также проводить калибровку ("обучение") устройств виброакустической диагностики подшипников качения. Для этого испытывают эталонный подшипник 13 с дефектом вида 1 и величиной 1. А затем проводят настройку устройства диагностики таким образом, что оно правильно регистрирует вид и величину дефекта.Установка позволяет также испытывать подшипники качения. Для этого 35 о офТакое испытание повторяют и раз. При 20 этом блок 39 вычисления записывает значение ; каждого испытания и определяет среднюю оперативную продолжительность диагностирования вместо эталонного устанавливают подшипник с неизвестным техническим состоянием и определяют с помощью установки ресурс его работы, уровень вибрации и другие характеристики,При этом за счет уменьшения неконтролируемых вибраций на испытуемый подшипник и возможности задания осевой нагрузки удается повысить качество испытаний.ф о р м у л а изобретенияГ1. Способ испытания устройств диагностики подшипников качения, заключающийся в том, что вносят дефект сборки и (или) изготовления в эталонный подшипник и задают режим его работы, о т л и ч а ю щ и й с я тем, что, с целью повышения качества испытаний и расширения Функциональных возможностей, дополнительно вводят вид и величину дефекта эксплуатации в эталонный подшипник, определяют дефект, сравнивают его с веденным дефектом и на основании этого определяют технические показатели устройства диагностики.2. Способ по и.1, о т л и ч а ющ и й с я тем, что, с целью повышения качества испытаний задают вероятность правильного диагностирования дефекта заданного вида, диагностируют эталонные подшипники с дефектом заданного вида,и заданной величины, определяют вероятность правильного диагностирования для каждой величины заданного дефекта, сравнивают с заданной вероятностью правильного диагностирования вида дефекта и на основании этого определяют минимальную величину дефекта, определяемого устройством диагностики.3. Способ по п.1, о т л и ч а ющ и й с я тем, что, с целью повышения качества испытаний и расширения Функциональных возможностей, задают вероятность правильного диагностирования дефекта заданного вида, воздействуют вибрацией, сопровождающей работу механизма, на эталонный подшипник, увеличивают вибрацию,фиксируют уровень, при котором вероятность правильного диагностирования дефекта заданного вида становится равной заданной, сравнивают зафиксированный уровень с уровнем вибрации в механизме и на основании этогоопределяют степень помехозащищенности устройства диагностики.4. Установка для испытания устройств диагностики подшипников качения, содержащая смонтированные на основании приводной вал с испытательной головкой и приводом, узел радиального нагружения, источник давления воздуха и испытательный механизм, последовательно соединенные измеритель угловой скорости и таймер, о тл и ч а ю щ а я с я тем, что, с целью повышения качества испытаний и расширения Функциональных возможностей, она снабжена эталонными подшипниками, узлом осевого нагружения, последовательно соединенными блоком вычисления и блоком индикации, узлом 1 имитации помех, датчиками осевого и радиального перемещений, при этом датчик осевого перемещения подключен 5к первому входублока вычисления и к первому входу исполнительного механизма, а датчик радиального перемещения - к второму входу блока вычисления и второму входу исполнительного механизма, третий вход блока вычисления соединен с выходом таймера, при этом испытательная головка выполнена с возможностью задания перекоса колец эталонного подшипника, приводной вал установлен в аэростатической опоре, боковые полости которой образуют узел радиального нагружения, а торцовые полости образуют узел осевого нагружения.1375966 Составитель В.ПучинскийРедактор В,Бугренкова Техред Л.Олийнык Корректор В,Гири Заказ 78 Производственно-полиграфическое предприятие,г.ужгород, ул.Проектная,4 2 Тираж 847 ВНИИПИ Государственногопо делам изобретений 113035, Москва, Ж, Р Подписноеомитета СССРоткрытийушская наб., д.4/5
СмотретьЗаявка
4055883, 14.04.1986
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
ЗАОЗЕРСКИЙ АЛЕКСЕЙ ЮРЬЕВИЧ, МИРОНОВИЧ ВИТАЛИЙ ПАВЛОВИЧ, ШАРАФУДИНОВ ТЕМИРГАЗИЗ ТАЛИБУЛЛОВИЧ, ВАСИЛЬЕВ ДМИТРИЙ ЛЬВОВИЧ, ЯВЛЕНСКИЙ КОНСТАНТИН НИКОЛАЕВИЧ, БАСЕНКО СЕРГЕЙ ДМИТРИЕВИЧ, НЕЖДАНОВ ГЕННАДИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01M 13/04
Метки: диагностики, испытания, качения, подшипников, устройств
Опубликовано: 23.02.1988
Код ссылки
<a href="https://patents.su/7-1375966-sposob-ispytaniya-ustrojjstv-diagnostiki-podshipnikov-kacheniya-i-ustanovka-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ испытания устройств диагностики подшипников качения и установка для его осуществления</a>
Смазывающее устройство моторно-осевого подшипника железнодорожного транспортного средства

Номер патента: 1382718
Опубликовано: 23.03.1988
МПК: B61F 17/24, F16N 7/12
Метки: железнодорожного, моторно-осевого, подшипника, смазывающее, средства, транспортного
...6 выполнена сферической, а центр тяжести его расположен ниже уплотнительного пояска гнезда клапана 6. Вертикальное перемещение клапана 6 ограничено упором 1 О. Внутри емкости 5 в верхней ее части установлен магнит 11 с 40 пружццой 2, а на поверхности емкости 5 расположеца обмотка 3, концы которой связаны с термодатчиком 14 через сопротивление 15, выполненное в виде спирали 16, охватывающей емкость 5.Смазывающее устройство моторно осевого подшипника работает следующим образом.Г 1 асло из резервуара 1 через поль- стер 3 поступает в зону трения оси 8 колесной пары. При движении железнодорожного транспортного средства корпус 2 тягового электродвигателя вместе со смазывающим устройством совершает сложные колебательные движения: в...
Смазывающее устройство моторно-осевого подшипника железнодорожного транспортногосредства

Номер патента: 1222976
Опубликовано: 07.04.1986
Авторы: Бакуров, Беднягов, Костенко, Савич, Титаренко
МПК: F16N 7/12
Метки: железнодорожного, моторно-осевого, подшипника, смазывающее, транспортногосредства
...1, прикрепленный к корпусутягового электродвигателя 2. Внутримасляного резервуара 1 расположенпольстер 3, закрепленный на кронштейне 4 и устройство дополнительногоподвода масла, содержащее емкость 5с клапаном 6 и канал 7.Нижний конец польстера 3 опущен в, масло, а верхний конец взаимодействует с осью колесной пары 8.Клапан 6 расположен в днище емкости 5 которое расположено ниже мини 25малько допустимого уровня масла. Верхняя часть емкости 5 имеет сливноеотверстие 9, которое находится вышесмаэывающей поверхности польстера 3и связано с ней посредством канала 7.Поверхность невозвратного клапанаб выполнена сферической, а центр тяжести его расположен ниже уплотнительного пояска гнезда клапана б,Вертикальное перемещение клапана...
Устройство для диагностирования механизма линейного перемещения манипулятора

Номер патента: 1590378
Опубликовано: 07.09.1990
Авторы: Заозерский, Лукьяненко, Миронович, Явленский
МПК: B25J 19/00, G01M 13/04
Метки: диагностирования, линейного, манипулятора, механизма, перемещения
...крутящего момента будет монотонно возрастать,МикроЭВМ 27 по программе производитвычисление разности 0 допускового и измеренного моментов и определяет монотонность изменения разности от величины перемещения (. В случае совместного присутствия этих признаков вырабатывается диагноз Перекос опор, который выводится в 15 30 35 40 45 50 коде на блок 26 регистрации. В том случае, когда при выдвижении на всю длину ( ползуна не будет зафиксировано превышение допускового уровня крутящего момента 0(0, микроЭВМ 27 вырабатывает диагноз Регулировка опор в норме, который фиксируется в блоке 26 регистрации. Затем микроЭВМ 27 формирует код управления на возврат ползуна 1 в начальное положение. Этот код поступает на блок 20 вывода информации, на первом...
Устройство для распрессовки шапок моторно-осевых подшипников

Номер патента: 626997
Опубликовано: 05.10.1978
Авторы: Великоцкий, Кадушкин, Покосенко, Сергиенко, Федотов
МПК: B60S 5/00
Метки: моторно-осевых, подшипников, распрессовки, шапок
...в,горизонтальной плоскости установлены рычаги8 с продольными пазами 9, В пазах установлены стойки 10, основания которых закреплены наподпружиненных ползунах 11, расположенныхвнутри рычагов 8. К верхней части стоск 10 при.креплены захваты (в виде скоб) 12, имеющиеодну неподвижную, 13 и одну подвижную 141 Огубки, соединенные со штоками 15, закрепленными на скобах силовых цилиндров захвата 16Каждьй захват 12 снабжен распрессовывающимсиловым цилиндром 17 с упором 18.Для обеспечемя самоустановки захватов 12,15независимо от расстояния между шапками, ры.чаги 8 соединены между собой телескопичес.кой подпружиненной тягой 19, Подъем и опус.канне рычагов 8 с захватами 12 осуществляется силовым цилиндром 20, шток 21 которого Осоединен с тягой...
Устройство для диагностики дефектов машин и механизмов циклического действия

Номер патента: 868360
Опубликовано: 30.09.1981
Авторы: Китаев, Кошечкин, Сергеев
МПК: G01H 1/08
Метки: действия, дефектов, диагностики, машин, механизмов, циклического
...9 частоты, одновибратором10 и коммутатором 11. 15Устройство работает следующимобразом,Вибросигнал с вибропреобразователя 1 после усиления в усилителе 2поступает на вХод блока 3 формирова- Яния интегральных оценок,.Одновременно преобразователь 7 углового положения, установленный на мемеханиэме циклического действия, например на валу (не показан), формирует импульсный сигнал, повторяющийсяс частотой вращения вала. Этот импульсный сигнал, частота которого соответствует частоте вращения вала,поступает на вход синхронизатора 8,работающего в режиме внешнего запуска. Синхрониэатор 8 вырабатывает опорный сигнал. С выхода синхронизатора8 синхроимпульсы поступают на умножитель 9 частоты. Умножитель 9 частоты, коэффициент умножения...
Предыдущий патент: Приспособление для заполнения консистентной смазкой подшипников качения
Следующий патент: Устройство прогнозирования ресурса коренных подшипников двигателя внутреннего сгорания
Случайный патент: Устройство для крепления проводов контактной сети