Устройство для функционального контроля линейного объекта управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1112346
Авторы: Мироновский, Михайлов







Текст
СООЭ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК р С 05 В ОПИСАНИЕ ИЗОБРЕТЕНИ АВТОРСКОМУ СВИДЕТЕЛЬСТВУ йлов Ми тв 19 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПОДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(71) Ленинградский институтонного приборостроения(прототип),(54) (57) УСТРОЙСТВО ЛЛЯ ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ ЛИНЕЙНОГО ОБЪЕКТАУПРАВЛЕНИЯ, содержащее блок индикации, канал контроля, состоящий изп звеньев, каждое из которых содержит первый сумматор и соединенный сего выходом интегратор, и второгосумматора, подключенного вторым входом к выходу интегратора последнегозвена, первые входы второго сумматора соединены с первыми входами первых сумматоров и с выходами контролируемого линейного объекта управления, входами соединенного со вторымивходами первых сумматоров, третьивходы первых сумматоров каждого звена, кроме первого, соединены с выходом интегратора предыдущего звена,о т л и ч а ю щ е е с я тем, что, сцелью повышения достоверности резуль"татов контроля, в устройство введены(ц) каналов контроля, идентичныхпо структуре первому каналу контроля,.и пороговых элементов и элемент ИЛИ,выходом подключенный к входу блокаиндикации, а входами связанный с выходами с 1 пороговых элементов, входкаждого из которых соединен с выходом второго сумматора данного каналаконтроля, а также с одним из третьихвходов первого сумматора первогозвена и с одним из четвертых входовпервого сумматора остальных звеньеввсех каналов контроля, а третьи входы второго сумматора каждого каналаконтроля, кроме последнего, соединены соответственно с вьмодами интеграторов последних звеньев всех последующих каналов контроля.Изобретение относится к контро.тьно-измерительной технике, а именнок устройствам для контроля системуправления, и может быть использовано при функциональном контроле технических объектов.Известно устройство для функционального контроля систем управления,содержащее эталонную модель, подключенную параллельно системе управления, причем математическое описаниемодели соответствует математическомуописанию объекта контроля, блоксравнения, ограничитель, интегратор,логический пороговый блок 1 .Недостатками устройства являютсясложность эталонной модели, порядоккоторой равен порядку проверяемойсистемы управления, а также невысокая достоверность контроля.Наиболее близким по техническойсущности к изобретению является устройство идентификации линейногообъекта управления, содержащее блокиндикации и канал идентификации,состоязий из и звеньев, каждое изкоторых содержит первый сумматор исоединенный с его выходом интегратор, и второго сумматора, подключенного вторым входом к выходу интегратора последнего звена, первыевходы второго сумматора соединены спервыми входами первых сумматорови с выходами блоков контролируемоголинейного объекта управления, входами соединенного со вторыми входами первых сумматоров и третьим входом второго сумматора, третьи входыпервых .,сумматоров каждого звена,кроме первого, соединены с выходоминтегратора предыдущего звена, блокиндикации подключен к выходу второ.го сумматора. Число звеньев и в канале идентификации равно максимальному порядку.ш линейных блоковобъекта 12,В случае исправности объектауправления и равенства коэффициентовсумматоров устройства параметрамобъекта выходной сигнал устройства6 равен нулю. При возникновении неисправности в 1-м блоке объектаправления выходной сигнал этого15 лока равен4У= У+ ьУ;,где ЬУ - изменение выходного сигнала 1-го блока У вследствие неисправности. Тогда на выходе устройства появится сигнал рассогласования, равный16=- - К, ьУ,- ,5ьУ; - -; у5 1где -- оператор интегрирования,К1 = ощ - коэффициенты усиления1,1 )устройства по выходномусигналу 1-го звена.10 Это приводит к тому, что загорится световое табло блока индикации,сигнализирующее о появлении неисправности,Однако может позникнуть ситуация,когда неисправность возникнет не водном блоке, а в нескольких, причемтаким образом, что изменения выходных сигналов этих блоков взаимнокомпенсируются в сумматорах устройства и выходной сигнал Ь последнего 20останется неизмененым, т,е. равнымнулю. В этом случае возникшие неисправности не будут выявлены, что 25снижает достоверность контроля спомощью указанного устройства.Целью изобретения является повышение достоверности результатов конт.роля.Поставленная цель достигаетсятем, что в устройство для функционального контроля линейного объектауправления, содержащее блок индикации, канал контроля, состоящий изй звеньев, каждое из которых содер жит первый сумматор и соединенныйс его выходом интегратор, и второгосумматора, подключенного вторым входом к выходу интегратора последнегозвена, первые входы второго суммато ра соединены с первыми входами первых сумматоров и с выходами контролируемого линейного объекта управления, входами соединенного со вторыми. входами первых сумматоров, третьи 45 входы первых сумматоров каждого звена, кроме первого, соединены с выходом интегратора предыдущего звена,введены (-1) каналов контроля, идентичных по структуре первому каналу 50 контроля,пороговых элементов иэлемент ИЛИ, выходом подключенныйк входу блока индикации, а входамисвязанный с выходамипороговыхэлементов, вход каждого из которых 55 соединен с выходом второго сумматора данного канала контроля, а такжес одним из третьих входов первогосумматора первого звена и с одним11123 из четвертых входов первого суммато/ра остальных звеньев всех каналовконтроля, а третьи входы второгосумматора каждого канала контроля,кроме последнего, соединены соответственно с выходами интеграторовпоследних звеньев всех последующихканалов контроля,На фиг. 1 приведена структурнаясхема предлагаемого устройства дляфункционального контроля линейногообъекта управления с произвольнымчислом выходов; на фиг, 2 - структурная схема предлагаемого устройствадля функционального контроля линейного объекта управления, состоящегоиз трех блоков, пример. 10 15 Устройство для функциональногоКонтроля линейных объектов управления содержит каналы контроля 1,1-1,каждый из которых состоит из П звеньев, включающих первый сумматор 2и соединенный с его выходом интегратор 3, и второго сумматора 4, подклю-ченного вторым входом к выходу интегратора 3 последнего звена. При этомчисло звеньев П в каждом из каналовконтроля равно показателям наблюдаемости контролируемого линейногообъекта управления в порядке их возрастания, Кроме того, устройствосодержит пороговые элементы 5,1-5,.элемент ИЛИ 6 и блок 7 индикации,В каждом канале первые входы первых 35сумматоров 2,1-2. г 1 соединены с первыми входами второго сумматора 4 ис выходами контролируемого объектауправления, входами соединенного совторыми входами первых сумматоров 402, 1-2,п, третьи входы второго сумматора 4 каждого канала контроля,кроме последнего, соединены с выходами интеграторов 3 последних звеньеввсех последующих каналов контроля,. 45выход второго сумматора 4 соединенс одним из третьих входов первогосумматора 2. 1 первого звена и содним из четвертых входов первогосумматора остальных звеньев всех каналов контроля и через соответствующий пороговый элемент 5 подключенк входу элемента ИЛИ 6. Выход последнего соединен с входом блока 7 индикации. 55Число звеньев п, число каналовконтроляи коэффициенты усиленияпервых 2 и вторых 4 сумматоров мо 46 4жет бьггь определено следующим образом.Пусть контролируемый объект управления задан своим описанием в пространстве состоянийФх=АхМф В(О; Уф =СМ(М)где Ч - ш - вектор входа,Ч - Я - вектор выхода,Х - и - вектор состоянря,А, Б, С - известные матрицы,Знание матриц А, В, С позволяетопределять такие характеристики объекта управления, как устойчивость,управляемость, наблюдаемость, а также находить численные значения по 1казателей наблюдаемости К,К 5,характеризующих размерность векторовсостояния подсистем, на которые можетбыть декомпозирован объект управленияЧтобы найти показатели наблюдаемости, записывают матрицу наблюдаемостиЗатем анализируют линейную зависи. мость столбцов матрицы Р, Если столбец (С, Л ) является лннейной комбинацией предшествующих столбцов, а столбец (С, Л ) таким свойством не обладает, то говорят, что1число К = 1 является первым показателем наблюлаемости. Аналогично вполняют анализ столбцов (С 2 Л) (С 5 А) . Таким образом, анализируя матрицу О, устанавливают совокуп 1ность целых чисел КК, Загисывая мх в порядке возрастания, получают последовательностьЧисло Ч определяет число каналовконтроля в предлагаемом устройствеи выбирается, исходя из требуемойдостоверности контроля, а число К 5.,1,Кз - число звеньев и в каждом из каналов,Коэффициенты усиления первыхсумматоров 2.1-2,п по выходным сигналам объекта управления УУобозначаются К 13 Ф 1 = 1 ЧФ 3 ==О =1,С 7 (,) СА"СД" 15 20 где Т - 1-ая строка матрицы Т, которая равна 1ъ Р 1 ъ" 11 ,Е 1 0 1 1 2,7О О О,где Е - единичная матрица размер 0ности ЧЧфЧисла, 1=1,Ч Р = 2,о характеризуют значениякоэффициентов усиления вторых сумматоров 4.1-4.с по выходным сигналамп-ых интеграторов 3 каждого каналаконтроля,М - матрица размерности о Б,задаваемая в соответствии с требуемой достоверностью контроля. В частности, матрица М может быть заданааналогично проверочной матрице кода 75Хэмминга.Коэффициенты усиления первых сумматоров 2.1-2.п по входным сигналамобъекта управления 131Пщ обозна-чаются 3 и определяются соотношениями3 =-,МСЬ,, =-(т МСК" а; С" +ж, ЦВ, З 5Устройство работает следующим образом.Предположим сначала, что неисправности в контролируемом объектеуправления отсутствуют.В каждом 1-ом (=1,Ч) канале контроля устройства входные и выходныесигналы контролируемого объектауправления, усиленные соответственнов 1 о и ;о раэ (коэффициенты о и ;о45определяются согласно выражениям(2) и (1), складываются первым сумматором 2.1 и поступают на входинтегратора 3.1. Сигнал, получаемыйв результате интегрирования, складывается первым сумматором 2.2 с усиленными ви К, раз соответственно входными и выходными сигналамиконтролируемого линейного объектауправления и подается на вход интегратора 3.2, и так далее до техпор, пока на выходе последнего интег"ратора канала З.п не появится сигнал 2 величина которого определяетсяв соответствии с выражениемр 1,й-"Р 1,.-,0р.ф;,оРо 4(3)Сигнал 2, поступает на вход 1-говторого сумматора 4, где складывается с выходными сигналами проверяемого объекта управления УУб,усиленными соответственно в тп,в1(% ф9раз (коэффициенты ш,", =1,Ч 1=1, Бпредставляют собой элементы матрицы М, задаваемой исходя из требуемой достоверности контроля), и выходными сигналами последних интеграторов 3 всех последующих каналовконтроля, т.е. сигналами 2 Р,Р=+1,о, усиленными враз соответРственно (коэффициентынаходятсясогласно выражению (1. Выходнымсигналом -го второго сумматора 4является сигнал Ь который равеннулю при правильной работе контролируемого линейного объекта управления.т. е,1=0,=1, (4) что может быть легко доказано.Сигналы Д;, определяемые в сост" ветствии с выражением (4), обладают чрезмерной чувствительностью к малым отклонениям и низкочастотному дрейфу параметров и сигналов. Для устранения этого недостатка необходимо охватить каналы контроля устройства дополнительными обратными связями, в результате чего на третьи входы первого сумматора первого звена и на четвертые входы первого сумматора остальных звеньев всех каналов будут поступать выходные сигналы Ь, всех вторых. сумматоров 4. Коэффициенты усиления первых сумматоров 2.1-2.п по сигналам Ь,1)1=1,о для простоты. можно принять равными 1. Так как при правильной работе контролируемого объекта управления сигналы Д, =О, то их поступление на первые сумматоры 2.1-2.п не вызывает никаких изменений в работе устройстваСигналы Ь, - Д поступают на входы пороговых элементов 5.1-5.о осуществляющих сравнение сигналов с ну- левым уровнем.В связи с тем, что при правильной работе контролируемого линейного2346 7объекта управления входные сигналыпороговых элементов 5.1-5.е 1 равнынух.ю, то и их выходные сигналы равны нулю. Поэтому выходной сигналэлемента ИЛИ 6, на вход которогопоступают выходные сигналы всех пороговых элементов 5.1-5.е 1 такжеравен нулю. Вследствие этого будетсветиться табло блока 7. индикации,указывающее на исправность контролируемого линейного объекта управления,Рассмотрим теперь работу устройства для функционального контролянри появлении неисправности в объекте управления,Предположим, что возникшая неисправность привела к тому, что одиниз выходных сигналов объекта управления, например У 1, стал равен У"У 1 + ДУЕ, где дУ,- величина йриращения сигнала У, эа счет возникшей неисправности. Вследствие этогоможно записать, что вектор выходныхсигналов объекта управленияз у + ду (5)где дУ = ДУ 00Тогда вектор выходных сигналоввторых сумматоров 4, 1-4.е 1, сформированных в результате прохождениявходных 1)П и выходных У%УУ 5 сигналов контролируемоголинейного объекта управления черезканалы контроля 1.1-1.е 1 устройствапля функционального контроля равен Е:м "(Е,фЕ-.," р-.,),- ,Ьо С ЪоЕ 1)АУ(ЕЕ 11 - ЕЕсЕ,У 14 С- - дЧ,+о - Р =ддЬЕР " Орн -1 Первая из составляющих вектора выходных сигналов д, равна нулю.Поэтомуь:д вас(еЕ 1 Р-;-ьУ,.,а, - ьУ,Вследствие того, что матрица М задается таким образом, что в каждом ее столбце имется хотя бы один ненулевой элемент, среди совокупности выходных сигналов Д .1-д,е 1 вторых сУмматоров 4.1-4.е 1 хотя бы один сигнал будет отличен от нуля. Это приводит к тому, что уровень выходного сигнала соответствующего изпороговых элементов 5,1-5.е( будетравен уровню логической единицы,вследствие чего на выходе элемента5 ИЛИ 6 появляется сигнал, отличныйот нуля. Этот сигнал, поступая паблок индикации 7, включает световоетабло последнего, свидетельствующеео появлении неисправности в контро 1 О лируемом объекте управления.Если неисправности возникнут не вв одном, а в нескольких блоках контролируемого линейного объектауправления, то благодаря особому15 виду матрицы контрольных условий М(которую, как отмечалось, можновыбрать аналогично проверочной матрице кода Хэмминга), они не будутскомпенсированы, т,е. в отличие20 от известного устройства, неисправности такого вида будут выявлены спомощью предлагаемого устройстваП р и м е р, Пусть контролируемыйобъект состоит из трех линейных блоков с передаточными функциями видаРЕ 1 1(РеЕРЕ2( ) РЕ 1 ф Рсоединенных произвольным образом,Тогда выходной сигнал Д известно 30го устройства описывается выражением (2)1 1Ь - е(,КеХФХ 5-У,-12+-Х,-Ч -У 11,у,) ,где Х У е. 1 3 соответственновходные и выходные сигналы блоков контролируе 40 мого объектауправления.Предположим, что вследствие неисправностей выходные сигналы блоков У принимают значенияУе УЕ й 1 ф У 2 Ъ 2+1 ф У 3 УЗ+1,Очевидно, что при возникновениинеисправностей во. всех трех блокахвыходной сигнал устройства остается50равным нулю, т.е. появление дефектов в контролируемом объекте управления не будет обнаружено.Перейдем теперь к предлагаемомуустройству для функционального контроля. Выберем матрицу контрольныхусловий М, равную9 111 т,е, число каналов контроля устройства и 2.Так как показатели наблюдаемости контролируемого объекта управления Кщ 2, К =2 К =1 то оба канала конт.2 ф 3 ф роля будут содержать по два звена (Фиг,2), Коэффициенты усиления первых сумматоров каналов контроля по входным и выходным сигналам контролируемого объекта управления соответственно равны1 -2 1 О б ф1 О О -1 О 11 -1 -1Коэффициент усиления второго сумматора первого канала контроля по выходному сигналу последнего интегратора второго канала ,21. Тогда выходные сигналы вторых сумматоров 2346обоих каналов контроля соответственно определяются по следующим выражениям2 Ъ р 22 Очевидно, что паже если вследст 10 вие возникновения неисправностейвыходные сигналы контролируемогообъекта управления примут значения,укаэанные выше, сигнал Ь, и Ь 2 будут отличны от нуля, свидетельствуя15 о наличии дефекта.Таким образом, в предлагаемомустройстве значительно уменьшаетсявероятность взаимной компенсациивозникающих при неисправностях изме 20 нений величин сигналов, снимаемыхс контролируемого объекта управления, т.е. повышается достоверностьконтроля,111234 Ь 2,Я Составитель П.Михайлоактор 11,Коссей Техред М .Гергель Решетник Коррект 8 ПодиССР Филиал ППП "Патент", г. Ужгород,ектная, 4 Заказ 6458/33 Тираж ВНИИПИ Государст по делам изобр 113035, Москва, Ж, нного комитета Сений и открытийаушская наб., д. 4/
СмотретьЗаявка
3579256, 15.04.1983
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
МИРОНОВСКИЙ ЛЕОНИД АЛЕКСЕЕВИЧ, МИХАЙЛОВ НИКОЛАЙ ЛЕОНИДОВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: линейного, объекта, функционального
Опубликовано: 07.09.1984
Код ссылки
<a href="https://patents.su/7-1112346-ustrojjstvo-dlya-funkcionalnogo-kontrolya-linejjnogo-obekta-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для функционального контроля линейного объекта управления</a>
Устройство для индикации квадратурного сдвига фаз между первыми гармониками переменных сигналов

Номер патента: 1453336
Опубликовано: 23.01.1989
Автор: Бучма
МПК: G01R 25/00
Метки: гармониками, индикации, квадратурного, между, первыми, переменных, сдвига, сигналов, фаз
...сравниваемый сигнал Б проходит через второй управляемый Фазовращатель 7 и второй избирательный усилитель 8 на второй вход сумматора 13, сигналы с входа и выхода инвертора 5 через третий коммутатор 12 поступают на первый вход сумматора 13. При непрерывной работе третьего коммутато" ра 12 на выходе сумматора 13 форми-. руется амплитудно-модулированный сигнал, амплитудная модуляция которого обусловлена отклонением сдвига фаз между первыми гармониками сравниваемых сигналов У, и Б от квацратуры, а также отклонением модуля и фазы коэффициента передачи инвертора 5 от номиналов, равных единице и и, не- идентичностью фазочастотных и амплитудно-частотных характеристик первых5 145333и вторых управляемых Фазовращателей3 и 7, избирательных...
Устройство для регистрации значений контролируемых параметров

Номер патента: 1509594
Опубликовано: 23.09.1989
Авторы: Авдеев, Зельцер, Митин, Столяр
МПК: G01D 3/024
Метки: значений, контролируемых, параметров, регистрации
...ключей 20 и 21 при одновременном срабаты" ванин схем совпадений на выходе многомерных Фильтров 3 и 4.Второй ключ 20 запускает первый коммутатор 5; блок 16 программного управления запускает привод 11 (х)и через первый ключ 9 подключает квходу привода 10 (У) выход интегратора 8, отключая при этом от привода10 выход первого источника 15 постоянного сигнала.При работе первого коммутатора5 сглаженные сигналы Е и Е сИ 12выходов первого и пятого фильтров 27 и46 низкой частоты первого многомерного фильтра 3 и сигнал Ео с выходапервого источника 15 постоянногосигнала поступают через первый коммутатор 5 попарно на алгебраическийсумматор 7, где последовательно,по мере поступления сигналов из комму"татора 5, вычисляются разностигь рЕо Еп ю ДЕ Ен...
Устройство для сигнализации состояний контролируемого агрегата

Номер патента: 1257683
Опубликовано: 15.09.1986
МПК: G08B 23/00
Метки: агрегата, контролируемого, сигнализации, состояний
...сигналы неисправности агрегата, которые поступают наклемму 26 "Авария" и, пройдя черезэлемент НЕ 4, блокируют прохождениесигнала пуска агрегата через элементИ 9 и сигнала отсутствия условий пуска агрегата через элемент И 12 на индикатор 22, Сигнал с клеммы 26 "Авария" поступает через элементы И 11и ИЛИ 16 на вход элемента И 9, разрешая прохождение импульсов с генератора 8 импульсов через элементыИ 19 и ИЛИ 21 на вход индикатора 22,который светится красным мигающимсветом, что означает неисправностьагрегата. Сигнал неисправности проходит также через элемент ИЛИ 17 наклемму 28 "Звук" для включения источника звукового сигнала,При подаче на клемму 27 "Квитирование" кратковременного сигнала"0" элемент 5 памяти устанавливаетсяв нулевое...
Устройство для идентификации нестационарных объектов второго порядка

Номер патента: 610066
Опубликовано: 05.06.1978
МПК: G05B 17/02
Метки: второго, идентификации, нестационарных, объектов, порядка
...системы и вхо-,ду ее в нелинейную зону. Кроме того, 30устройство не позволяет определить коэф-,фициенты передаточных функций нествцио-;нарных систем и систем со случайным 1 запаздыванием.Это снижает точность определения коэффнциентов передаточных функций исследуе-,мого объекта.Целью изобретения является повышениеточности .работы устройства,Поставленная цель достигается тем, 40что в предложенном устройстве установленблок управления, в выход блока сравнения,через последовательно соединенный первыйи второй ключи соединен со входом первогринтегратора. Выхоц четвертого интегратора через первый инвертор, первый умножи-;тель и первый сумматор соединен с первыйвходом вычислителя коэффициентов объекта,Выход третьего интегратора...
Устройство для измерения параметров инерционных звеньев систем регулирования
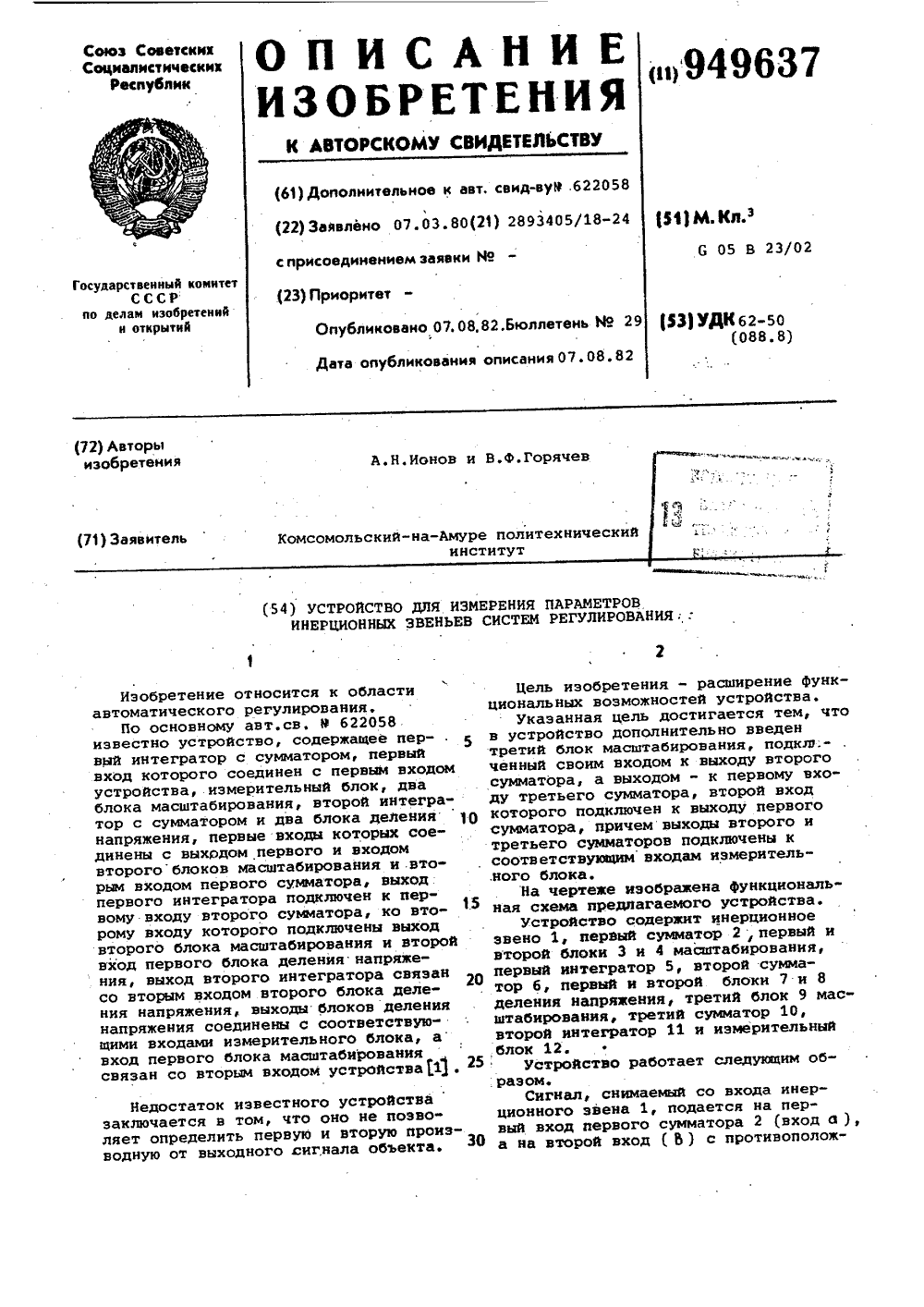
Номер патента: 949637
Опубликовано: 07.08.1982
МПК: G05B 23/02
Метки: звеньев, инерционных, параметров, систем
...второму входу ( Ь ) интегратора. 6 с 10противоположным знаком. Сигнал, снимаемый с выхода блока 3 масштабирования,подается на один из двух входов каждого из блоков 7 и 8 деления (делитель).На второй вход блока,7 деления 15подается сигнал с выхода блока 4 мас-,штабирования, а на второй вход блока8 деления через интегратор 11 - сигйал с выхода сумматора 6. При этом)через выходной сигнал блока 7 деления 20соответствует величине коэффициентапри первой производной дифференциального уравнения исследуемого звена,сигнал на выходе блока 8 делениявеличине коэффициента при второй производной, а сигнал на выхоце сумматора 6 - первой производной от выходного сигнала инерционного звена 1. Сигнал с выхода сумматора 6 через третий1масштабирующий...
Предыдущий патент: Система автоматического управления электрической нагрузкой предприятия
Следующий патент: Регулятор давления
Случайный патент: Способ непрерывной прокатки