Адаптивная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
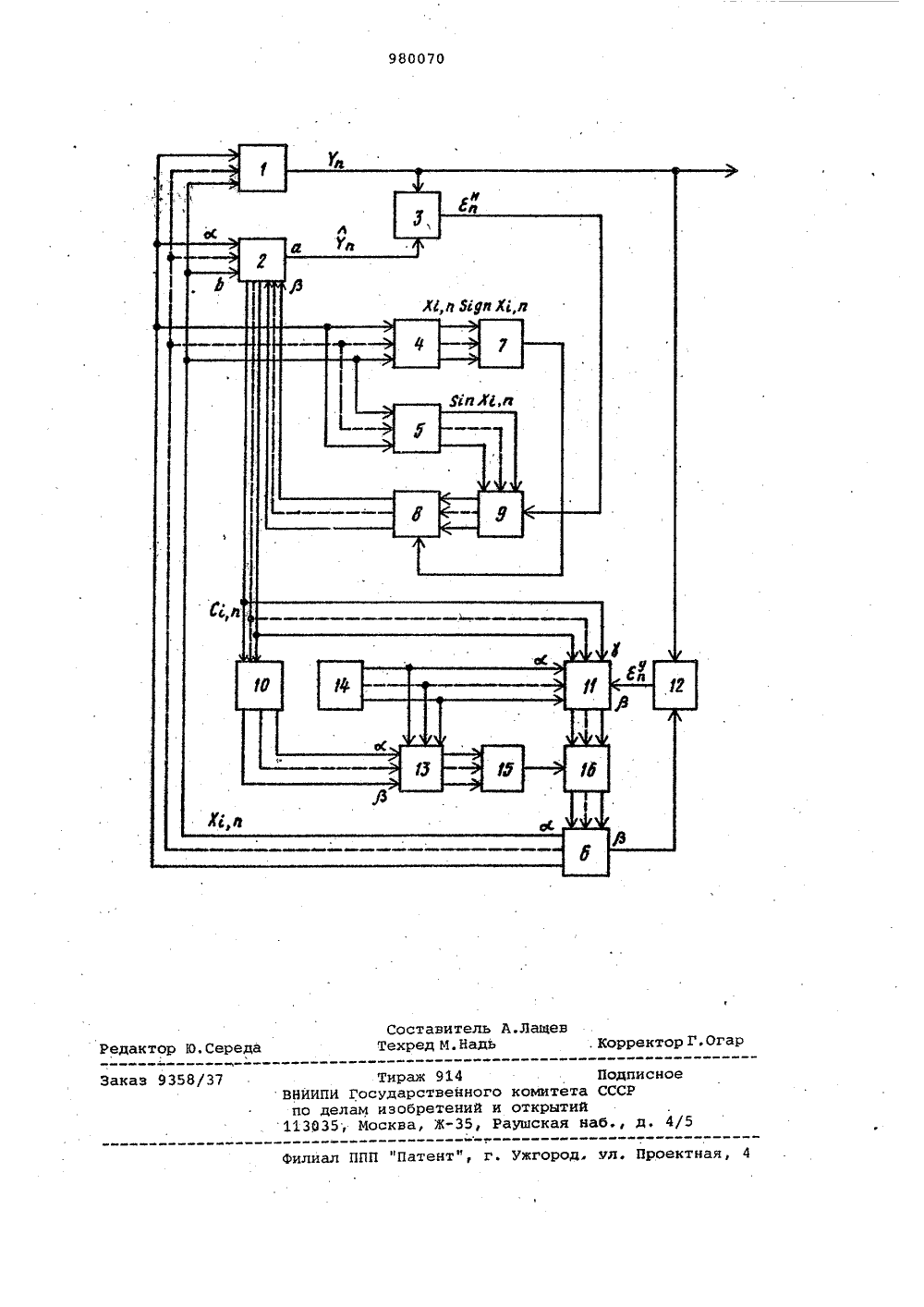
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик(22) Заявлено 230630 (21) 2945069/13-24 И 11 М Кп з с присоединением заявки Нов(23) Приоритет -С 05 В 17/00 Государственный комитет СССР но делам изобретений и открытий(088.8) Опубликовано 07,12 В 2, Бюллетень М 45 Дата опубликования описания 07,12.82(71) Заявитель 54) АДАПТИВНАЯ СИСТЕИ УПРАВЛЕНИЯ Изобретение относится к вычислительной технике и может найти применение в системах автоматического управления нестационарными объектамис быстрым дрейфом характеристик приналичии неконтролируемых возмущенийна входе.Известна самонастраивающаясясистема для регулирования объектовс запаздыванием, содержащая эталонную модель, объект регулирования,блок сравнения, первый умножитель,усилитель, интегратор, второй ум-.ножитель, блок задержки, третий умножитель, второй усилитель, второй интегратор и четвертый умножитель 1 ).Недостатком этой системы являетсяневысокие точность и быстродействиепри управлении существенно нестационарными объектами,Наиболее близком по техническойсущности к предлагаемой является система автоматического управления, содержащая объект управления и модельобъекта управления, подключенныевыходами к входам первого сумматора,второй, третий, четвертый сумматорыи регулятор, первые выходы которогосоединены с соответствующими входамимодели и объекта управления 2 3. Недостатком этой системы является невысокая помехоустойчивость при произвольном законе распределения помехи и недостаточно высокое быстродействие, объясняющееся отсутствием возможности коррекции модели по мере изменения параметров объекта и задающего воздействия.Цель изобретения - повышениепомехоустойчивости и быстродействия системы при управлении нестационарными объектами,Указанная цель достигается тем, что в адаптивную систему управления, содержащую объект управления и модель объекта управления, подключенные выходами к входам первого сумматора, второй, третий, четвертый сумматоры и регулятор, первые выходы которого соединены с соответствующими входами модели и объекта управления, введены блок выпрямителей, последовательно соединенные релейный блок, первый блок умножения и первый блок деления, последовательно соединенные квадратор и второй блок умножения и последовательно соединенные блок задания весовых коэффициентов, третий блок уМножения и второй блок деления,. выходы которого соединены с соответвоздействий; Сф - тп - мерный векторнеизвестных коэффициентов объектауправления. Модель 2 может бытьзадана уравнениемТП ПП 1,п),пгде у - отклик модели; С- т - мерный вектор настраиваемых коэффициентов модели.О В общем случае отклонение выхода модели от заданного значения выходной величины можно записать следующим, образомб: у -хп=елб, ( 3) 15и- п й пб :(С"- С)Тф С вторых выходов (Ь) модели 2 (выходы коэффициентов) вычисленные значения коэффициентов С подаются навходы квадратора 10 и третьи входы.(г ) третьего блока 11 умножения. Наоснове информации, поступающей с выхода объекта 1 управления и с второго выхода (р)регулятора 6 в третьем сумматоре 12 вычисляется ошибкауправления б" = х"- У, которая подается на второй вход (р )третьего блока 11 умножения. На первые входытретьего блока 11 умножения и на первые входы (Ы ) второго блока 13 умножения с выходов блока 14 задания:весовых: коэффициентов подаются сигналы обратно пропорциональные стоимости входных воздействий - а- Наосновании поступающей информации втретьем блоке 11 умножения вычисляются величины б-а " С , а во втором,блоке 13 умножейия, вторые входы (р)которого подключены к выходам квадратора 10 - величины а "С . В четвер.том сумматоре 15, входы которогоподключены к выходам второго блока13 умножения, осуществляется суммирование.компонентов а 1 с в результате чего на его выходе появлягетсЯ скалЯРнаЯ величинаа . С, ,к,рого блока 16 деления. На входы делимого второго блока 16 деления по.дается информация с выхода третьегоблока 11 умножения, в результате.деления вычисляется корректирующеебхвоздействие по управлению рЕ. С3 1,н6которое подается на входы регуляторакоторый по первым выкодм (о), вы.числяет управления в виде1,и+ ,и+ Ф4. М "СТаким образом, квадратор 10, третий блок 11 умножения, третий сумматор 12, второй блок 13 умножения,блок 14 задания весовых коэффициентов, четвертый сумматор 15 и второйблок 16 деления образуют контур управления, минимизирующий рассогласованиемежду задающим воздействием уи выходом объекта Х.В качестве примера рассмотримследующее,Пусть объект описывается уравнеошибка идентификации; где б"=(х" -х )Тс - ошибка управления.Меру качества идентификации можно характеризовать некоторым критерием близости координат модели иобъекта р(С,Сф), являющимся функци ей от ошибки идентификации б"В практике и теории идентификациинаибольшее распространение пблучилквадратичный критерий, однако известно, что оценки коэффициентов, полу- ЗО ченные с помощью этого критерия,критичны к виду функции распределения помех. Таким образом, системаидентификации, работающая по минимуму квадратичной ошибки, не является помехоустойчивой на широком классе функций распределения помех, Применение модульного критерия вида)Ъ 1 С, С") = С"- Сп) - " пИ 1 4) 40 позволяет получить эффективные оценки для широкого класса помех.Несложно показать, что алгоритмидентификации, минимизирующий критерий (,4 ), имеет видт45 хп-Сп 1 хпСп пх 5 х э%ипиТгде зип хп:5 п т этап хд пс- за "е,п)20 50 55 65 ниемХп-С" х=2:С". х., (1)1 3 ),пфгде Т- отклик объекта на Ь-мтакте;Т- гп - мерный вектор входных О пРи 1 х.дф ЗР Х- 1 ПРИ Х сР-1 при Хп СУ . Ошибку управления ЕУ целесообразно компенсировать, исходя из минимума энергетических затрат. Если для изменения ьыходной переменной на дх требуется изменение входного вектора на дхи+1, т е,ЛУ = Сдхп+1, (ь) то соответствующая энергетическая норма будет иметь вид Т1 "и+111=д)(п+1 АдУ 1, (Т)А - матрица стоимости управляющих воздействий ( весов).Практический интерес представляет случайкогда А диагональная.Таким образом, задача нахождения оптимального закона изменения дхи,может быть сформулирована как задача минимизации нормы ( 7) при ограничениях ( б ),Введя функцию Лагранжа "ф("и+1 ")=И "и+1 П("и- и"и+4 ( ) где )( - неопределенный множитель Лагранжа, условием экстремума которой является дЬ(йХЛ)20=аУ- СДХ+1 (1 О) нетрудно получить, что искомый закон управления будет иметь нидьчд С30 где А- - матрица обратная А.Полное изменение 1-го компонента. входного вектора с учетом диагональности матрицы стоимости А запишется следующим образомуа."С,Х,:Х . " 1 1 Ппи, "а щ ---- И 12),иНесложно показать, что данный 40 алгоритм является оптимальным по быст- родействию.Таким образом, адаптивная система управления реализует следующий помехоустойчиный алгоритм управления не- стационарным объектом П = 1,П,) иС. х.С =С, +):1 Блок идентификации, реализуя первую составляющую алгоритма (13),обеспечивает слежение за изменяю- Я) щимися параметрами объекта упранлеиияС " , т.е, обеспечивает стремление к нулю 1 " . Вторая составляющая алгоритма (13) обеспечивает компенсацию ошибки управления Е .у Таким образом, обшая ошибка (3 в результате работы системы стремится к нулю с максимально нозможной скоростью.В исходном состоянии коэффициенты модели С =0 на выходах ( Ы ) регулятора б Х; о =О, выходе регулятора б ( Р) - нуль. В первый момент времени и =1, на выходахрегулято. ра б появляются управляющие воздействия хна выходах блока 14 задания весовых коэффициентов - сигналы а-" . Воздействия .х; 1 подаются на входы объекта 1 управления, модели 2, блока 4 выпрямителей, релейного блока 5. На основе реакции объект та 1 управления М и модели 2 ч 1 =0 в контуре идентификации ( блоки 2,3,4, 5,7,8,9 ) вычисляются оценки коэффициентов моделиУС 1,1=,ШХ) "1которые устанавливаются в модели 2и по ее вторым выходам ( Ъ) подаютсяна входы квадратора 10 и третьегоблока 11 умножения. По истечении времени идентификации Т на выходе (р)регулятора б появляется сигнал задающего воздействия чф , который можетбыть как постоянным, так и некоторой функцией времени, программно реализуемой регулятором б, В частномслучае задающее воздействие у" может задаваться не регулятором б, а вручную. В течение периода управления 2 н контуре управления вычисляется управляющее воздейстниеХ =Х+12 )1 т Д 1 С 11Е:аС.Ь 1По истечении периода Г 2 на выходе (9) регулятора б вновь появляется нуль, а воздействие х; подается на входы объекта управления и модели 2.Реакция объекта 1 управления у 2 и модели 2 У 2 ФО служит исходной информацией для вычисления коэффициентовФ2 , 11 5 Л51(и Х 2 11,2 е1С. х;,)1 х 1которые через время (7172) подаются на входы квадратора .10 н третьего блока 11 умножения, а на выходе (р) регулятора б.вновь поянлягтся По истечении времени 2( +72)вычисляет-, ся управляющее воздействие. Корректор Г, Огар едактор Ю,Середа аз 9358/37 ПодписноеСССР аж 914ственного комитета ретений и открытийЖ, Раушская н Тир НИИПИ Госуда по делам иэо 13635, Москв у де ППП "Патент", г, Ужгород. дл. Проектная,
СмотретьЗаявка
2945069, 23.06.1980
ПРЕДПРИЯТИЕ ПЯ А-3732
ЗАЙЦЕВ ИВАН ДМИТРИЕВИЧ, САЛЫГА ВАЛЕРИЙ ИВАНОВИЧ, ДЯЧЕНКО НИКОЛАЙ СТЕПАНОВИЧ, БОБУХ АНАТОЛИЙ АЛЕКСЕЕВИЧ, РУДЕНКО ОЛЕГ ГРИГОРЬЕВИЧ, БОДЯНСКИЙ ЕВГЕНИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 17/00
Метки: адаптивная
Опубликовано: 07.12.1982
Код ссылки
<a href="https://patents.su/6-980070-adaptivnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система управления</a>
Устройство для автоматического управления вакуумным деаэратором

Номер патента: 1817823
Опубликовано: 23.05.1993
МПК: F22D 1/50
Метки: вакуумным, деаэратором
...ы через него, если фактическое значение температуры воды внутриК 4 = 10331,32; К 5 = 1751,65; Кб = 11634, 53 45 деаэратора находится в диапазоне 40 СТьф81 С, А если фактическое значеУравнение (3) с учетом (4) принимает ние температуры воды внутри деаэратораниже 40 С, то есть Ты(т)40 С, то сигналТ ь;(т) только пропускает через него третийпороговый блок 24, Таким образом на первом выходе анализатора 13 температуры воды имеется сигнал Т"ьф), если фактическоезначение температуры воды в деаэраторе 1 находится в диапазоне 40 С - Тоь - 81 С, ана втором выходе - имеется сигнал Тьг(1),если фактическое значение температуры воды в деаэраторе 1 ниже 40 С (Ть (1)40 С).На выходе датчика 12 давления имеетсясигнал Р (т), пропорциональный фактичерован на...
Система оптимального управления с моделью объектами второго порядка

Номер патента: 888071
Опубликовано: 07.12.1981
Авторы: Синеглазов, Чумаченко
МПК: G05B 13/04
Метки: второго, моделью, объектами, оптимального, порядка
...- ОП 1+Оьщр Оп 1 где ОпХ- максимальноезначейие уйравляюших воздействий какфункции фазовых координат объекта уп 71 Ьравления )(1 И), Х(+ ). При этом система реализует нелинейный закон управления, определенный на фаэовой плоскости уравнением линии переключения. Поскольку кусочно-линейная или кусочно- нелинейная аппроксимация функции переключения сопряжены со значительными погрешностями, то для реализации закона управления могут быть использованы рекуррентные соотношенияХ"=В(Ь)гд (Ь)О. Х", +С 1(Ь) Х, ЭО)-1 ","-С,(Ь)фдад)О В,( )Х 1.Х,СО на основании которых можно реализовать уравнение движения объекта. Коэффициен- ты А 1(Ь), В,(Ь), С, (Ь), А (Ь), В(Ь), С(Д) являются линейными функциями коэффициентов объекта, шага прогнозирования Ь....
Устройство для определения коэффициентов статистической линеаризации нелинейных динамических объектов

Номер патента: 519687
Опубликовано: 30.06.1976
МПК: G05B 23/02
Метки: динамических, коэффициентов, линеаризации, нелинейных, объектов, статистической
...тходных сигналов м =Ро фх10 ычно п=М ГЮИ)стен. Цель бретения - повышение точности и упроратуры для определения параметровивалентной линейной модели. щение апп и К эк При этом параметры 9дующим соотношениям пределяются по сл и=М 1 ЮИ)-1 с х И)1, ( КУх (+,где 9 О - статистический коэффициент усилени по математическому ожиданию; татистический коэффициент усилено случайной составляющей. ных процессовтистической ид ких объектов,Известно 11 устройств аризации, когда за крите объекту принято услови го ожидания, квадрата ра объекта ЧИ) и линейной Для определения параметров известное устроиство содержит блок регистрации, первый блок умножения, первый блок усреднения, блок согласования, второй блок умножения, подключенный первым входом к...
Устройство для определения коэффициентов дифференциальных уравнений линейных объектов

Номер патента: 739560
Опубликовано: 05.06.1980
Авторы: Добров, Плотников, Ставкин
МПК: G06G 7/38
Метки: дифференциальных, коэффициентов, линейных, объектов, уравнений
...ключа соединен с первым входом первого аналого-цифрового преобразователя, третий выход блока управления подключен ко вхоцам генераторов .экспоненциальных сигналов и к соответствующему входу коммутатора.50На фиг. 1 представлена структурная схема устройства; на фиг, 2,-схема ге нератора экспоненциальных сигналов; на фиг. 3 - графики входных и выходныхсигналов.55Устройство цля определения коэффициентов дифференциальных уравнений линейных объектов содержит генераторы1-4 экспоненциальных сигналов, комму- . 0 4татор 5, линейный объект 6, аналого- .цифровые преобразователи 7 и 8, блок9 деления, блок 10 умножения, блок 11памяти, вычислительный блок 12, вТоройключ 13, первый ключ 14 и блок 15управления.Возможная реализация...
Адантивное устройство для идентификации объекта управления

Номер патента: 1478190
Опубликовано: 07.05.1989
Авторы: Авдеев, Жданов, Карпов, Киселева
МПК: G05B 13/02, G05B 23/02
Метки: адантивное, идентификации, объекта
...а С выходов второго блока 11 аналого-цифрового преобразователя последовательность сигналов Ч, Я , Ч п 1Чп 1 поступает на входы первой 1 и второй 6 моделей объекта управления, на входы первого 3 и второго 8 блоков умножения и на блок 5 набора масштабных коэффициентов.Формирование оценок параметров объекта управления с помощью первой модели 1 объекта управления (в первом канале идентификации) осуществляется следующим образом.Выходные сигналы У, Я, У Я , ,Ъ п первой модели 1 объекта управления подаются на первые входы первого сумматора 2, на вторые входы которого подается последовательность сигналов У, п, У п 17 п 1 с выходов первого блока 10 аналого-цифровых преобразователей. Первый сумматор 2 вычисляет рассогласование выходных...
Предыдущий патент: Регулирующее устройство
Следующий патент: Способ регулирования массового расхода газа из баллона
Случайный патент: Трехканальное мажоритарно-резервированное устройство