Система траекторного управления летательным аппаратом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
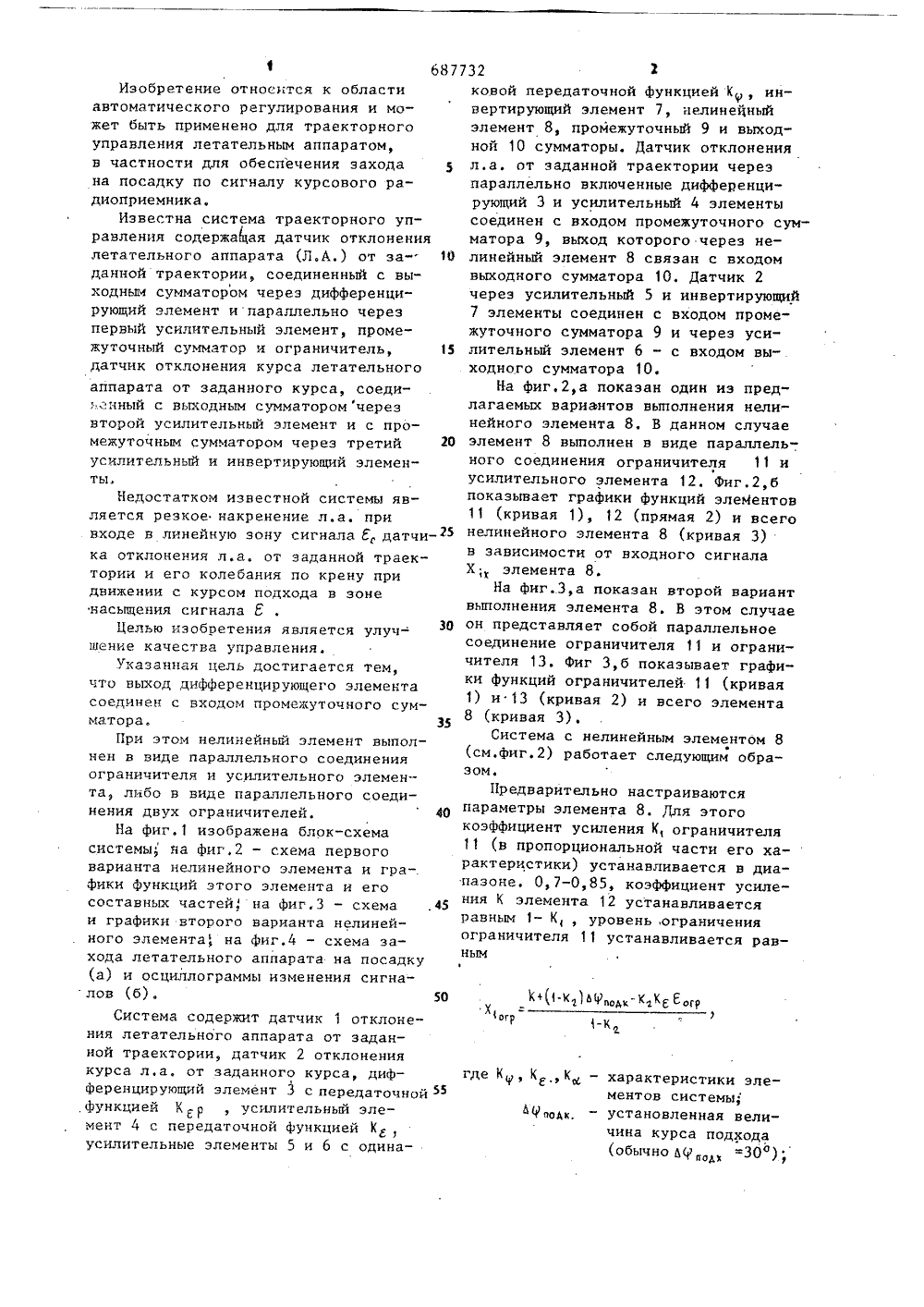
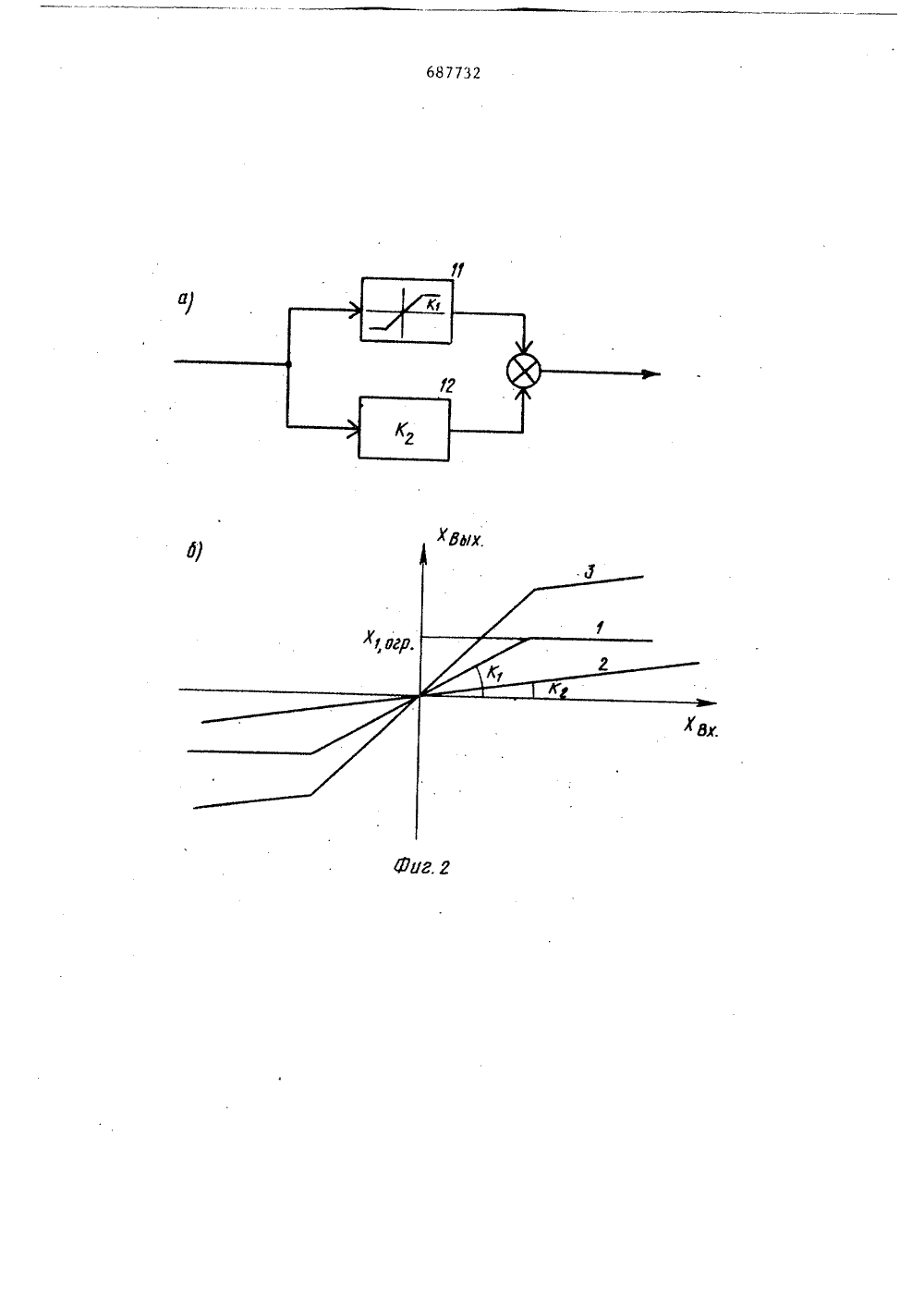
)9) ЯО Н 7 1)4 В 64 С 13/38 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТ МОМУ СВИДЕТЕЛЬСТ нелинейн(53) 629.13.014.585 промежуточныи сумматорэлемент соединен с входсумматора, датчик отклолетательного аппарата о м выходног ения курса заданного рой усилиэлементы сумматора Р 41 Носато урса соединен через. вт ельный и инвертирующий входом промежуточного 88.8) ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(54) СИСТЕМА ТРАЕКТОРНОГО УПРАВЛЕНИЯЛЕТАТЕЛЬНЬП 4 АППАРАТОМ(57) 1. Система траекторного управления летательным аппаратом, содержащая датчик отклонения летательногоаппарата от заданной траектории,датчик отклонения курса летательногоаппарата от заданного курса, дифференцирующий нелинейный, инвертирующий, усилительные элементы, выходнойи промежуточный сумматоры, причемдатчик отклонения летательного аппарата от,заданной траектории связанс входами дифференцирующего и первогоусилительного элементов, выход первого усилительного элемента через и через третии усилительный элемент - с входом выходного сумматора, о т л и ч а ю щ а я с я тем, что, с целью улучшения качества управления, выход дифференцирующего элемента соединен с входом промежуточного сумматора.2. Система по п.1, о т л и ч аю щ а я с я тем, что нелинейныйэлемент выполнен в виде параллельно соединенных ограничителя и усилительного элемента.3. Система по п.1, о т л и ч а ющ а я с я тем, что нелинейный эле- а мент выполнен в виде параллельно соединенных двух ограничителей.20 Изобретение относится к области автоматического регулирования и может быть применено для траекторного управления летательным аппаратом, в частности для обеспечения захода на посадку по сигналу курсового радиоприемника.Известна система траекторного управления содержа 1 цая датчик отклонения летательного аппарата (Л.А.) от за данной траектории, соединенный с выходным сумматором через дифференцирующий элемент и параллельно через первый усилительный элемент, промежуточный сумматор и ограничитель, 15 датчик отклонения курса летательного аппарата от заданного курса, соеди;.;.нный с выходным сумматором через второй усилительный элемент и с промежуточным сумматором через третий усилительный и инвертирующий элементыНедостатком известной системы является резкое накренение л.а. при входе в линейную зону сигнала Е, датчика отклонения л.а. от заданной траектории и его колебания по крену при движении с курсом подхода в зоне насыщения сигнала ЕЦелью изобретения является улуч- шение качества управления.Указанная цель достигается тем, что выход дифференцирующего элемента соединен с входом промежуточного сумматора, 35При этом нелинейный элемент выполнен в виде параллельного соединения ограничителя и усилительного элемента, либо в виде параллельного соединения двух ограничителей. 40На фиг.1 изображена блок-схема системы на фиг,2 - схема первого варианта нелинейного элемента и гра-. фики функций этого элемента и его составных частей, на фиг,З - схема .45 и графики второго варианта нелинейного элемента, на фиг.4 - схема захода летательного аппарата на посадку (а) и осциллограммы изменения сигна лов (б) . Система содержит датчик 1 отклонения летательного аппарата от заданной траектории, датчик 2 отклонения курса л,а. от заданного курса, дифФеренцирующий элемент 3 с передаточной 55 ,функцией К, усилительный элемент 4 с передаточной Функциейусилительные элементы 5 и 6 с одина 732 зковой передаточной функцией К инвертирующий элемент 7, нелинейный элемент 8, промежуточный 9 и выходной 10 сумматоры. Датчик отклонения л,а. от заданной траектории через параллельно включенные дифференцирующий 3 и усилительный 4 элементы соединен с входом промежуточного сумматора 9, выход которого через нелинейный элемент 8 связан с входом выходного сумматора 10. Датчик 2 через усилительный 5 и инвертирующий 7 элементы соединен с входом промежуточного сумматора 9 и через усилительный элемент 6 - с входом вы-. ходного сумматора 10.На фиг,2,а показан один из предлагаемых вариэнтов выполнения нелинейного элемента 8. В данном случае элемент 8 выполнен в виде параллельного соединения ограничителя 11 иусилительного элемента 12. Фиг.2,бпоказывает графики функций элементов11 (кривая 1), 12 (прямая 2) и всегонелинейного элемента 8 (кривая 3)в зависимости от входного сигнала Х; элемента 8.На фиг.З,а показан второй вариантвыполнения элемента 8. В этом случаеон представляет собой параллельноесоединение ограничителя 11 и ограничителя 13. Фиг З,б показывает графики функций ограничителей 11 (кривая1) и 13 (кривая 2) и всего элемента8 (кривая 3).Система с нелинейным элементом 8(см,фиг.2) работает следующим образом.Предварительно настраиваютсяпараметры элемента 8, Для этогокоэффициент усиления К, ограничителя11 (в пропорциональной части его характеристики) устанавливается в диапазоне. 0,7-0,85, коэффициент усиления К элемента 12 устанавливаетсяравным 1- К уровень, ограниченияограничителя 11 устанавливается равным5(1 К) ьподк ККЕ огрогр 1-Кй где К, К.,К - характеристики элементов системы,ЧпоАк, - установленная величина курса подхода3величина ограничениясигнала Е датчиком1. Передаточные Функции элементовсистемы 3-6 устанавливантся такиеже, что и в известных системах.На Фиг.4 показано действие системы на примере траекторного управления л,а. при заходе на посадку посигналу курсового радиомаяка. Нафиг.4,а показана схема захода. Обозначения: ВПП - взлетно-посадочнаяполоса, КРМ - курсовой радиомаяк,На фиг.4,б показаны соответствующиеосциллограммы сигналов; Е, у ир,В начале разворота сигнал, приходящий на выходной сумматор 10 сусилительного элемента 6, превышает сигнал, приходящий на тот жесумматор с нелинейного элемента 6,Разность этих сигналов приводит кобразованию сигнала заданного крена, разворачивающего л.а, н сторону уменьшения сигнала ьу . Приуменьшении сигнала Ь до величины6 у,(момент 1, ) сигналы с выходовэлементов 8 и 6 сравниваются, чтоприводит к уменьшению заданного кренадо нуля, после чего л.а,движется прямолинейно с курсом, равным курсу подхода 6 Непрямолинейная характеристика сигнала Ев его насыщенной части приводит кпоявлению на выходе элемента 3 производной К Е . Однако на выход сисбтемы этот сигнал приходит ослабленным нелинейным элементом 8, работающим на пологом участке своей характеристики. Вход л.а, в зону пропорциональной характеристики сигнала Г(момент) сопровождается появлениемзначительного сигнала Б И Я на выхоЕде элемента Э. Этот сигнал такжепроходит на выход системы ослабления коэффициентом К, .с которымв это время работает нелинейный элемент 8. В результате заданной кренплавно нарастает, после чего медленно уменьшается до нуля, обеспечивая нормальное вписывание" л.а. назаданную траекторию. В конце переходного процесса выхода л.а. на заданную траекторию сигнал на входе нели 87732 4нейного элемента 8 уменьшается, этотэлемент работает на крутом участкесвоей характеристики с коэффициентомусиления, равным единице. Отсюда следует, что в конце переходного процесса и после его окончания динамические и статистические характеристики управления, обеспечиваемые предлагаемой системой, совпадают с харак теристиками известных систем-аналогов.Нелинейный элемент 8, выполненныйв виде параллельного соединения двухограничителей (фиг.3), настраивает ся следующим образом. Характеристикаограничителя 11 не изменяется. Коэффициент усиления ограничителя 13 (впропорциональной части его характеристики) устанавливается равным 20 Уровень ограничения ограничителя 1 Эустанавливается равнымк,к 6Х 1огр25 Действие системы, нелинейный элемент 8 которой выполнен в виде соединнения ограничителей 11 и 13, отличается лишь на этапе движения, л.а,на курсе подхода, В связи с тем, что З 0 нелинейнй элемент 8 работает наэтом этапе в точке его характеристики, соответствующей границе пропорциональной части ограничителя 13, сигналпроизводной К Е обусловленный непрямолинейностью характеристики насыщения сигнала с направленный науменьшение курса подхода, проходитчерез элемент 8, ослабленный соответственно коэффициенту К . Тот же 40 сигнал, но направленный на увеличение курса подхода, через элемент 8не проходит совсем. Тем самым достигается еще большее ослабление колеба-.1ний л.а. по крену при его движении 45 на курсе подхода.Таким образом значительно улучшается качество траекторного управления летательным аппаратом при егостабилизации на заданной траектории,если характеристика датчика отключения л,а. от заданной траектории имеет насыщение.687732 Составитель А. БлохинТехред И.Ходанич Корректор М. Самборская едактор Л. Письман 3 Подписно 53/1 Тираж 4ВпИИПИ осударственного кпо делам йзобретений и3035, Москва, Ж, Раушск аказ 6 митета ткрыти 4/5 я на Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
2574817, 27.01.1978
ПРЕДПРИЯТИЕ ПЯ В-2323
БРУК А. И, НОСАТОВ А. В, САЮРОВ В. Д
МПК / Метки
МПК: B64C 13/18
Метки: аппаратом, летательным, траекторного
Опубликовано: 07.11.1986
Код ссылки
<a href="https://patents.su/6-687732-sistema-traektornogo-upravleniya-letatelnym-apparatom.html" target="_blank" rel="follow" title="База патентов СССР">Система траекторного управления летательным аппаратом</a>
Бесконтактный датчик отклонений постоянного напряжения от заданного уровня

Номер патента: 180641
Опубликовано: 01.01.1966
Метки: бесконтактный, датчик, заданного, отклонений, постоянного, уровня
...обмоток, в цепи одной из которых включен нелинейный элемент (например, кремниевый стабилитрон). 15На чертеже приведена принципиальная схема датчика отклонений напряжения от заданного уровня.Напряжение контролируемого источника питания подводится к вводам 1 - 4 датчика. 20 При номинальном напряжении контролируемого источника рабочей точкой стабилитрона 5 является точка перегиба его вольт-амперной характеристики. При увеличении напряжения ток, проходящий через стабилитрон, резко 25 возрастает вследствие уменьшения его динамического сопротивления, что приводит к увеличению тока, проходящего через обмотку б (повышающую), Напряжение стабилизации кремниевого стабилитрона остается неизмен ным, поэтому ток, проходящий через обмотку 7...
Устройство для преобразования сигнала датчика магнитной восприил1чивости

Номер патента: 327431
Опубликовано: 01.01.1972
Авторы: Институт, Молчанов, Нехорошков, Ордена, Пономарев
МПК: G01V 3/18
Метки: восприил1чивости, датчика, магнитной, преобразования, сигнала
...или какой-либо иной конструкции.Устройство действует следующим образом.Когда датчик находится в немагнитной сре де, его индуктивное,и активное сопротивлениясоответственно равны индуктивному и активному сопротивлениям коипенсационного элемента. Отфильтрованное от четных гармоник напряжение основной частоты подводится к 15 клеммам 5, б. Так как, благодаря идентичносги обеих плеч, нагрузка по переменному таку во ьсе полупериеды одинакова, то четные гармоники, которые компенсируются и в точках 5, б, отсутспвуют. Если датчик попадает в маг нигную среду, его индукгианое сопротивлениеувеличяваегся, а у компенсационного элемента остается,прежним. Следовательно, в одном из полупериодов ток в цепи больше, чем во втором, т. е. в точках 5 и б...
Устройство для формирования сигнала относительного отклонения регулируемого параметра

Номер патента: 571790
Опубликовано: 05.09.1977
Авторы: Валдырев, Дралюк, Конторович, Мишин, Синайский
МПК: G05B 11/01
Метки: отклонения, относительного, параметра, регулируемого, сигнала, формирования
...с одной диагональю мостовойсхемы. й первому и второму входам элемента сравнения подключены соответственно источБик ОпорногО Напряжения и движок рео" я хорда задатчика, Выход елементя сравнениясмдйнен со входом источника регул 1 ируемонрпрржр Бия571790 Составитель А. ЛащевЛ, Утехина Техред 3. Фанта, К ор Л. Небопа 2/33 Тираж 1095 ИПИ Государственного комитетапо делам изобретений 3035, Москва, Ж, Раушская аказ 3 Подписное света Мини открытий аб., д. 4/5 в СССР Патент", г. Ужгород, ул. Проекгная, 4 лиал 3Устройство содержит реохорд измерители 1, измеритель 2, реохорд задагчика 3,источник регулируемого напряжения, в качестве которого использован усилитепь 4,эпемент сравчения 5 и источник опорногонапряжения 6,Устройство...
Формирователь сигнала датчика частоты вращения

Номер патента: 1327282
Опубликовано: 30.07.1987
МПК: G11B 15/46, H03K 5/153
Метки: вращения, датчика, сигнала, формирователь, частоты
...шиной 3,а выходом Аормирователя являются вы.ходы КБ-триггера 4,Формирователь работает следующимобразом.Сигнал с датчика частоты вращения(не показан) через усилитель или непосредственно поступает на сигнальную шину 3 (Лиг,2 диаграмма 10), навремя превышения которым уровня верхнего порога на выходе элемента 1 шормируется отрицательный импульс (Фиг,2" диаграмма 11). Аналогичный импульсформируется на выходе элемента 2 вовремя превышения по абсолютной величине нижнего порога (Лиг,2 диаграмма 12), Пороговый элемент 8 переключается при пересечении входным сигналом нулевого уровня (йиг,2 диаграмма13). Отрицательный перегад напряже 27282 2ния с порогового элемента 1 переключает триггер 7 по входу Б, а по входу К триггер 7 управляется...
Преобразователь сигнала датчика углового перемещения в сигнал колебания угловойскорости

Номер патента: 423044
Опубликовано: 05.04.1974
Автор: Китра
МПК: G01P 3/52
Метки: датчика, колебания, перемещения, сигнал, сигнала, углового, угловойскорости
...генератор пилообразного напряжения 4 с синхронизирующим звеном 5. Преобразователь рразом.Датчик углового перемещения 6 при вращении измеряемого ооьекта выдаст пилооб разное напряжение, частота которого пропорциональна частоте вра 1 ценпя ва; а, а мгновенные значения амплитуды пропорциональны величине поворота вала. При неравномерности вращения вала сигнал датчика 6 (в О пределах одного оборота вала) возрастаетнепрямолинейно. Генератор пилообразного напряжения 4, вьшолнснньш на основе блокинг-генератора или мультивибрагора, генерирует пилообразное напряжение, частота которого синхронпзируется сигналом датчика 6 через синхронизпрующее звено 5, которое выполнено в виде дифференцирую 1 цен цепочки, дающей кратковременные импульсы,...
Предыдущий патент: Способ определения коэффициентов диффузии и проницаемости газов в полимерных мембранах и устройство для его осуществления
Следующий патент: Способ предотвращения обратной ионизации
Случайный патент: Датчик точки росы