Система программного управления прокаткой концов полос
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 562327
Автор: Москвин


Текст
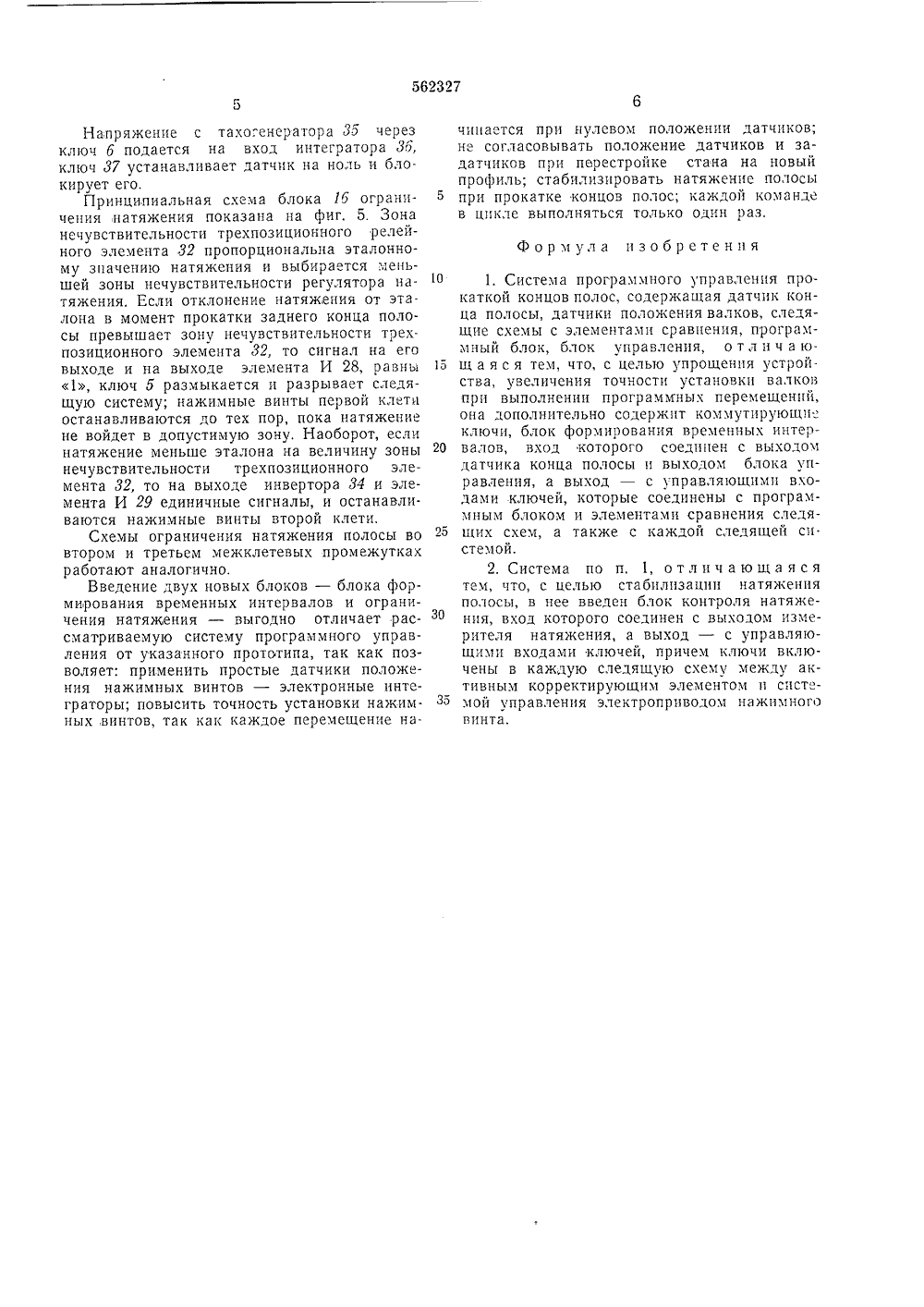
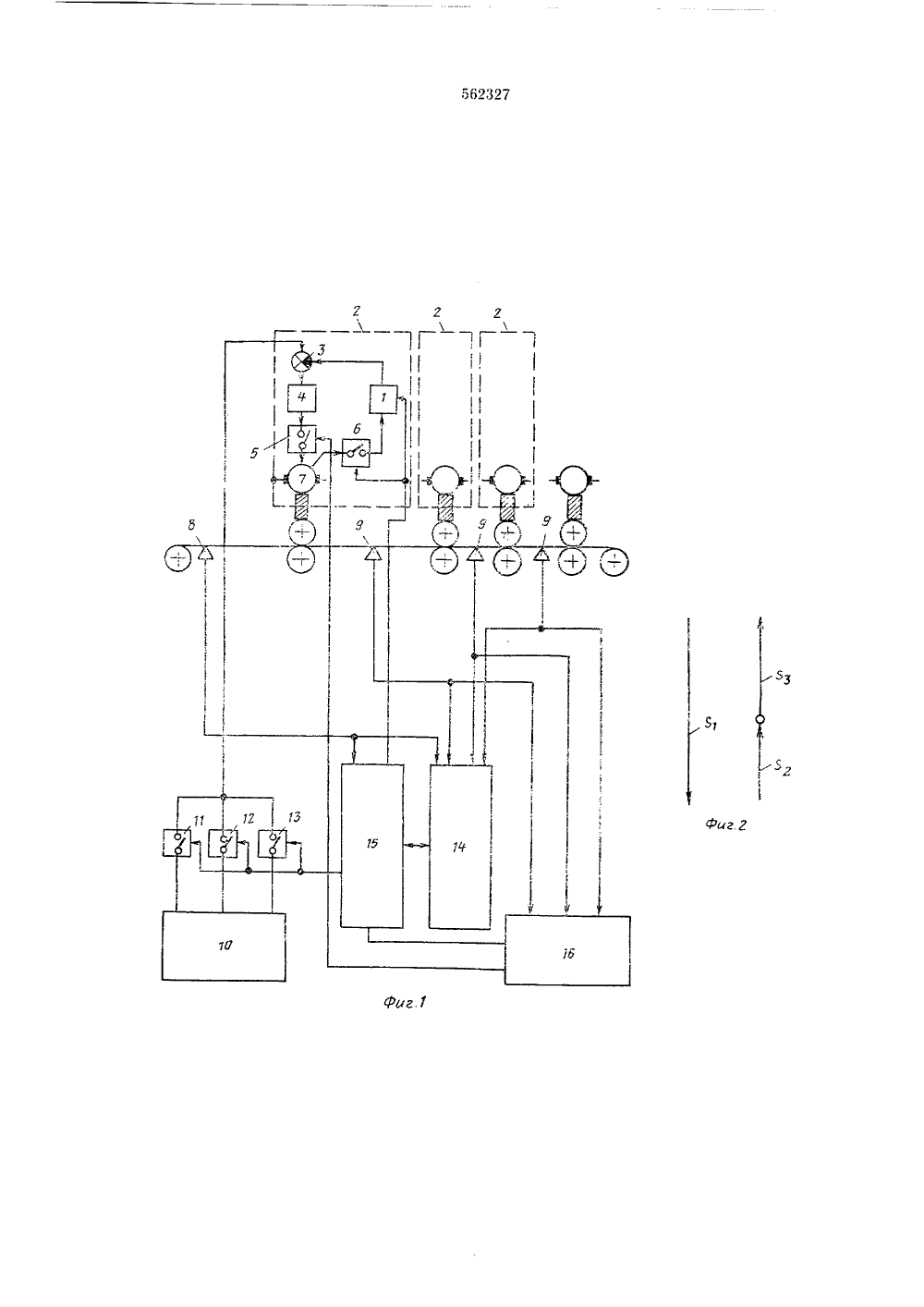
ОПИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(и) Я 2327 Союз Советских Сопиалистическиз Республик(51) М,Кл.-" В 21 В 37/00 22) Заявлено 08,12.75 97223 02 с присоединением заявк 3) Приоригет -осударстаеСовета Мии ын комитет тров СССР 53) УДК 621.771.23:(43) Опубликовано 25.06.77. Бюллетень хе (45) Дата опубликования описания 14.09,77 обретенииытий о делам и тнрЕМА ПРОГРАММНОГО УПРАВЛЕНРОКАТКОЙ КОНЦОВ ПОЛОС 4) зоб не И ретение относится к автоматизации прерывных станов олодной прокатки.Известно устройство, предназначенное длч устранения продольной разнотолщинности переднего и заднего концов полос, з котором 5 применяются системы управления, изменяю. щцг положение чажимных винтов клетей. Птц прокатке листа толщиной 3 - 0,7 мха эффективны дополнительные обжатия кочцов полос, для чего нажимные винты клетей при про катке заднего конца полосы опу"каются, а после прохождения переднего - полним аются до исходного положения. Эта операция до. стигается специальной программной системой.Недостатками устройства является слож ность ц необходимость подстройки при переходе на новый профилеразмер.Наиболее близкой к предлагаемому изобретению по технической сущности и достигаемому результату является система, состоящая 20 из задатчиков раствора валков, датчиков положения валков, которые сочленены с нажим- ными винтами, сельсинных следящих систем, отрабатывающих заданное по программе перемещение и схемы управления.Недостатком ее является то, что в этой системе при переходе с одного профиля на другой, а также при разогреве или выработке валков требуется согласование датчиков положения валков с задатчиками перемещений, 30 отсутствует коррекция программы по величине фактического значения межклетевых натяжений,Цель изобретения - упрощение устройства, увеличение точности установки раствора валков при отработке программных перемещений.Это достигается тем, что в систему, содер жащую датчик конца полосы, датчики поло женця валков, следящие схемы, программный блок, блок управления, введены блок формирования временных интервалов, блок ограничения натяжения и ключи (переключателц аналоговых сигналов). Вход блока формирования временных интервалов соединен с выходом датчика конца полосы ц выходом блока управления, а выход - с управляющцмц входами ключей, которые введены между про;-раммным блоком и элементами сравнения следящих систем, а также в каждую следящую систему между нажимным винтом и датчиком его положения. Вход блока ограниченця натяжения соединен с выходом измерителя натяжения, а выход - с управляющими зходамц ключей, причем ключи введены в каждую следящую систему между активным корректирующим элементом ц сцстемой управления электроприводом нажцмного винта,На фцг. 1 изображена блок-схема программной системы управления; на фцг. 2 - пока10 15 20 25 зо 35 40 45 50 55 6065 зан порядок программного перемещения нажимных винтов; на фиг, 3 - упрощенная принципиальная схема блока формирования временных интервалов; на фиг. 4 - схема электронного интегратора в качестве датчика перемещения нажимного винта; на фиг, 5 схема блока ограничения натяжения,Программная система имеет три датчика 1 (см. фиг. 1) положения валков соответственно первой, второй и третьей клети, следя,цие системы 2, которые содержат элемент 3 сравнения, активный корректирующий элемент 4, размыкающий и замыкающий кгночи 5, 6, включенные между корректирующим элементом 4 и системой 7 управления электропрнводом нажимного вппта и между нажимным винтом и датчиком 1 положения валка, датчик 8 конца полосы, измерители 9 натяжения полосы программный блок 10, ключи 11, 12, 13, включенные между программным блоком 10 и элементами 3 сравнения, блок 4 управления, блок 5 формирования временных интервалов и блок б ограничения натяжения.Блок 15 формирования временных интервалов (см. фиг, 3) содержит логический элемент И 17; логический элемент ИЛИ 18, лмпульсный элемент 19 и три субблока 20,Субблок 20 содержит логический элемент 21, реализующий функцию память, временную задержку 22, логические элементы И 23, 24, логические элементы ИЛИ - НЕ 25, 26 и логический элемент ИЛИ 27. Выход элемента 24 соединен с управляющим входом ключа 11, с разрешающим входом элемента память 21, с входом блока управления через элемент 18 ИЛИ, с управляющими входом ключа 6 и установочном входом датчика 1, с входом (см. фиг, 5) элементов И 28, 29. Запрещающий вход элемента 21 память :оединен с выходом импульсного элемента 19. Блок 16 ограничения натяжения состоит из трех идентичных субблоков 30. Каждый суб. блок 30 содержит элемент 31 сравнения, включенный между измерителем 9 натяжения и трехпозициоцным релейным элементом 32 с переменной зоной нечувствительности, реле 33 наличия натяжения, инвертора 34 и логических элементов И 28, 29.Задний конец полосы фиксируется датчиком 8 конца полосы (начало цикла) после чего нажимные винты первых трех клетей опускаются следящими системами вниз, это перемещение на фиг. 2 показано как 5 ь После выхода полосы из стана валки поднимаются вверх на величину 5, для встречи переднего конца полосы, после заправки полосы в стан валки указанных клетей поднимаются второй раз на величину 5, (конец цикла). Величина перемещений вниз (5,) и вверх (5 ь 5 З) формируются программным блоком 10. Автоматическое переключение сигналов - заданий 5 п 5 г, 5 з, на входе элемента сравнения 3 следящих систем осуществляется ключами 11, 2, 13 на основании команд из блока 15 формирования временных интервалов. На фиг. 3 изображена схема блока формирования временных интервалов, относящаяся к первой клети стана, Когда задний конец полосы сойдет с разматывателя, на выходе датчика конца полосы появляется сигнал 1; при наллчии разрешающего единия.ного сигнала из блока 14 управления на выходе элемента И 17 сигнал 1 и на выходе импульсного элемента 19 появляется кратковременный импульс, который переводит ва всех трех субблоках 20 элементы память 21 в положение О. На выходе элементов 22, 27 сигналы нулевые, а на выходе элемец. та 25 - сигнал 1. При наличии единиччогсигнала на выходе блока 14 управления разрешающего перемещение нажимцых винтов клетей вниз, на выходе элемснта И 24 сигнал также равен 1. Указанный сигнал ключом 11 подает сигнал 5, на вход элемента 3 сравнения, ключом 6 подсоедлняет датчикк нажимному винту и разблокирует его.Следящая система отрабатывает заданное перемещение. Одновременно единичный сигнал на выходе элемента 24 переводит элемент память в положение 1, на входе временной задержки появляется единичный сигнал и через 7 - 10 секунд сигнал 1 появляется на выходе временной задержки. На выходе элементов 24 и 25 сигналы становятся равными нулю. Ключ 11 снимает сигнал- задание со входа следящей системы, ключ б отсоединяет датчик 1 от нажимного винта, датчик положения валка 1 устанавливается и нулевое положение.Нулевой сигнал на входе разрешает блоку 14 управления выдать следующую по порядку команду на подъем нажимных винтов. При ручном вмешательстве совместной работой нажимных винтов в момент выполненля команды, на вход элемента ИЛИ 27 подается единичный сигнал по цепи; элемент 25, 26, 23. На выходе элементов 25 и 24 сигналы становятся нулевыми, т. е. выполняемая команда прекращается и запрещается до следующего цикла работы. Таким образом, при выполнении команды блок формирования временных интервалов создает фиксированный по длительности кацал между программным блоком и следящими системами, затем программный блок отключается от следящих систем, а датчики положения валков - от нажимных винтов и устанавливаются в нулевое положение.Длительность временного канала равна времени прохождения единичного сигнала через задержку 22 и выбирается такой, чтобы следящие системы успели отработать самое большое перемещение нажимного винта.При работе программной системы от датчиков 1 не требуется длительного запоминания перемещений нажимных винтов произве денных следящими системами. Поэтому в качестве датчиков положенля валков можно применить электронные интеграторы. Принципиальная схема такого датчика показана на фиг. 4, 562327Напряжение с тахогснератора 3 э через ключ 6 подается на вход интегратора Ж, ключ 37 устанавливает датчик на ноль и блокирует его.Принципиальная схема блока 16 ограничения натяжения показана на фиг. 5, Зона нечувствительности трехпозиционного релейного элемента 32 пропорциональна эталонному значению натяжения и выбирается меньшей зоны нечувствительности регулятора натяжения, Если отклонение натяжения от эталона в момент прокатки заднего конца полосы превышает зону нечувствительности трех- позиционного элемента 32, то сигнал на его выходе и на выходе элемента И 28, равны 1, ключ б размыкается и разрывает следящую систему; нажимные винты первой клети останавливаются до тех пор, пока натяжение не войдет в допустимую зону. Наоборот, если натяжение меньше эталона на величину зоны нечувствительности трехпозиционного элемента 32, то на выходе инвертора 34 и элемента И 29 единичные сигналы, и останавливаются нажимные винты второй клети.Схемы ограничения натяжения полосы во втором и третьем межклетевых промежутках работают аналогично.Введение двух новых блоков - блока формирования временных интервалов и ограничения натяжения - выгодно отличает рассматриваемую систему программного управления от указанного прототипа, так как позволяет: применить простые датчики положения нажимных винтов - электронные интеграторы; повысить точность установки нажимных,винтов, так как каждое перемещение начинается при нулевом положении датчиков; не согласовывать положение датчиков и задатчиков при перестройке стана на новый профиль; стабилизировать натяжение полосы Б при прокатке концов полос; каждой командев цикле выполняться только один раз,Формула изобретения10 1. Система программного управления прокаткой концов полос, содержащая датчик конца полосы, датчики положения валков, следящие схемы с элементами сравнения, программный блок, блок управления, о т л и ч а ю щ а я с я тем, что, с целью упрощения устройства, увеличения точности установки валков прп выполнении программных перемещений, она дополнительно содержит коммутирующи ключи, блок формирования временных интер валов, вход которого соединен с выходомдатчика конца полосы и выходом блока управления, а выход - с управляющими входами ключей, которые соединены с программным блоком и элементамп сравнения следя щих схем, а также с каждой следящей сп.стем ой.2. Система по п. 1, отличающаясятем, что, с целью стабилизации натяжения полосы, в нее введен блок контроля натяжения, вход которого соединен с выходом измерителя натяжения, а выход - с управляющими входами ключей, причем ключи включены в каждую следящую схему между активным корректирующим элементом и спстеЗ 5 мой управления электроприводом нажимноговинта.562327 Фиг. Ф Составитель А, АбросимовРедактор Л. Лашкова Техред В. Рыбакова Корректор И. Симки 5/1411 ЦНИИП ПодписСССР ак ип. Харьк. фил. пред, Патент Изд. ЪЪ 80осударственного компо делам изобретМосква, Ж, Рауш Тираж 1080итета Совета Минисний и открытийскан наб., д. 4/5
СмотретьЗаявка
2197223, 08.12.1975
МАГНИТОГОРСКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ ИМ. Г. И. НОСОВА
МОСКВИН ВЛАДИМИР МИХАЙЛОВИЧ
МПК / Метки
МПК: B21B 37/72
Метки: концов, полос, программного, прокаткой
Опубликовано: 25.06.1977
Код ссылки
<a href="https://patents.su/6-562327-sistema-programmnogo-upravleniya-prokatkojj-koncov-polos.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления прокаткой концов полос</a>
Устройство контроля распределения удельных натяжений по ширине прокатываемой ферромагнитной полосы

Номер патента: 1579595
Опубликовано: 23.07.1990
Авторы: Железнов, Журавский, Попов
МПК: B21B 38/06
Метки: натяжений, полосы, прокатываемой, распределения, удельных, ферромагнитной, ширине
...прокатки,Аналогично вторая пара измерительных роликов 8 и 9, расположенных над ферромагнитной полосой 2 (фиг, 1) или по одну сторону ферромагнитной полосы 2 (фиг. 2), сдвинута в начальный момент по фазе относительно их собственных осей вращения таким образом, чтобы линия, соединяющая точки 19 и 20 (фиг. 2) контакта участков спираль-геликоид 14 с ферромагнитной полосой 2 и определяющая направлениепринимаемого магнитного потока; составляла угол 90 фс направлением возбуждения магнитного потока по линии 17 и 18. Таким образом, "Крест" из линий, образованных точками 17, 18 и 19, 20, представляет собоймагнитоанизотропный датчик. Поскольку вращения всех четырех измерительных роликов 6, 7 и 8, 9 синхронизированно, например, с помощью...
Устройство для определения износа элементов гидросистемы регулирования раствора валков прокатного стана

Номер патента: 1672207
Опубликовано: 23.08.1991
МПК: B21B 31/32, B21B 38/00
Метки: валков, гидросистемы, износа, прокатного, раствора, стана, элементов
...15,Для проведения диагностики пары электрогидравлическихсервоклапанов 5 и 6 во время паузы в работе стана (смена валков, ремонт) распределитель 13 устанавливается в нейтральную позицию за исключением распределителя перед проверяемыми электрогидравлическими сервоклапанами 5 и 6. Управляющий сигнал с электрогидравлических сервоклапанов 5 и 6 снимается, их золотники при этом занимают среднее (симметричное относительно кромок отверстия) положение. При разгруженных насосах (подача жидкости из насосной станции 13 отсутствует) основную часть расхода из поршневого разделителя 15 будут составлять утечки через электрогидравлические сервоклапаны 5 и 6, Зная площадь поршня поршневого разделителя 15 по скорости его движения, замеряемой с...
Устройство противоаварийной автоматики

Номер патента: 575727
Опубликовано: 05.10.1977
Авторы: Богуславский, Федяев
МПК: H02J 3/24
Метки: автоматики, противоаварийной
...ключевых схем, одна из которых в зависимости от величины управляющего сигнала подключает соответствующий вход к объединенному выходу. Выход блока перемножения 3 соединен со входом вычислительного блока 5, содержащего элементы формирования доаварийного значения мощности и аварийного сброса мощности, выходные сигналы которых поступают на входы логико-вычислительного эле мента.Одна из отпаек вторичной обмотки трансформатора тока 2 соединена со входом блока переключения 6. Блок переключения содержит выпрямитель 7, соединенный с фильтром 8, выход которого подключен к объединенным входам нескольких пороговых элементов 9. Величины порогов устанавливаются произвольно в зависимости от ожидаемой кратности тока, Выходы пороговых элементов 9...
Группа универсальных клетей для непрерывной прокати полос с регулятором внутреклетевого натяжения

Номер патента: 863036
Опубликовано: 15.09.1981
Авторы: Гринчук, Дружинин, Зюзин, Погребняк, Пономарев, Рокотян, Фомин, Чехлов, Шавер
МПК: B21B 37/52
Метки: внутреклетевого, группа, клетей, натяжения, непрерывной, полос, прокати, регулятором, универсальных
...39, 40. Резистор 39 соединен с выходом операционного усилителя 21, а резистор 40 - со входом интегратора 41, охваченного обратной связью резистором 42 и конденсатором 43,-на выходе интегратора 41 подключен резистор 44, служащий для ограничения выходного тока интегратора 41. 25Универсальные клети работают вдвух режимах: первый - режим .тарйров-. ки, осуществляемый предварительно перед началом прокатки, второй - режим прокатки. При проведении тарировки зо включается главный привод клети (на .чертеже не показан), затем по показа. ниям датчика 11 давления .металла на валки устанавливается давление прижа- . тия вапков, соответствующее по величине, например, погонному усилию на бочке валков в 0,5 тс/мм. При этом на выхоДах датчика 11...
Система регулирования натяжения полос

Номер патента: 931254
Опубликовано: 30.05.1982
Авторы: Гринчук, Дружинин, Миронов, Пономарев, Ритман, Фомин, Цаллагов, Чехлов, Шавер
МПК: B21B 37/52
...блока 15, который осуществляет операцию деления входных сигналов друг на друга и формирование первого тарировочного сигнала, который в течение всего межтарировочного срока запоминается в решающем блоке.15.Далее формируют второй тарировочный сигнал, для этого эаьыкают тумблер во втором регуляторе 22 скорости (не показан) и задают постоянный темп ускорения валков клети Э., С второго тахогенератора 9 воэрастаюцее напряжение постоянного тока при этом поступает на вход преобразователя 26 аналог-частота (фиг.2), который преобразует напряжение постоянного тока в импульсы, причем чем больше скорость вращения валков клети, тем выше частота следования импульсов на его выходе и наоборот. Импульсы с выхода преобразователя 26 аналог-частота посту"...
Предыдущий патент: Прокатный валок
Следующий патент: Способ смазки при обработки металлов давлением
Случайный патент: Способ определения кординат центра радиуса профиля желоба деталей