Устройство для моделирования линейных функций “п” переменных
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 521574
Автор: Серов


Текст
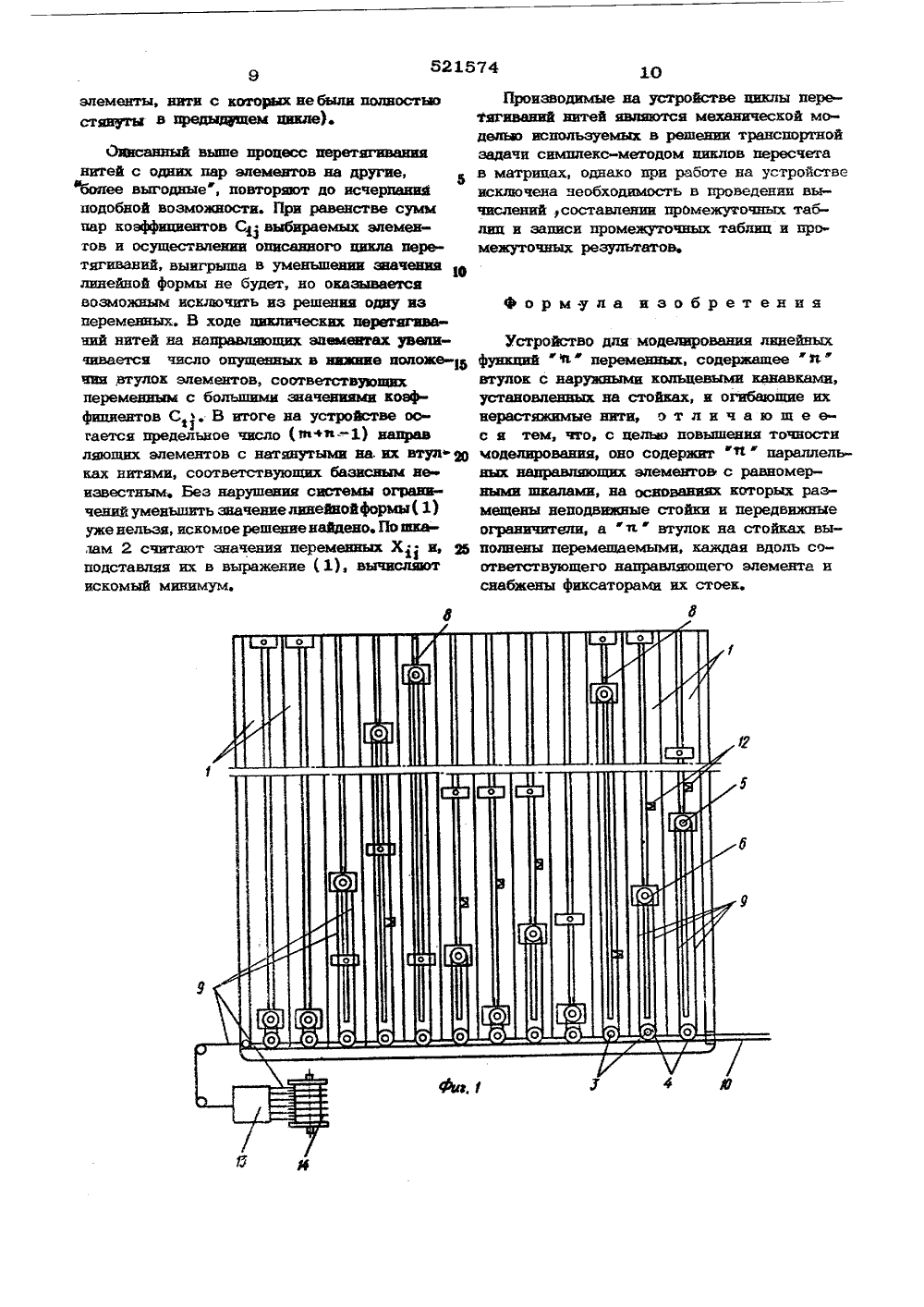
М, Кл Обо агав ГкфбретеенннВ неинтет т;енатв йнннстрев СОСр но делам нзабретеннй н етнрютнй72) Лвтор изобретбии к 1, Серов 71) Заявит Управление геологии Совета Министров Туркменск тй СГ.;5 И УСТРОйСТИО ДЛЯ МОДЕЛИРОВЛНИЯ ЛИНЕЙНЫ ФУНКЦИИтт " ПЕРЬМИНИХИзобрететройствам о ручным управленидля моделирования о программирован решенияипа значен линейн ортной задач транс мых к ней. Устроис использовано в катупного средства пр вод быт же про ого и д ч ения за а об ен г аемов уст - напра вляю перемешаемой редставляет со: нных 2 Он содержитвтулок с няружнми, установленшие их нерастябор непригоденалгебраических В" (по числу пе ыми кольцевыми ых на стойках, и жимые нити, Изве для моделировани яюших эле- ЛЛЕЛЬНО ОДИН ый направляолинейки с канавкаогибаюстный прия систем зной прорезью авнений и неравенств, но ие относится к вычислительным уч ии методике реш д ч линейного, про раммирования.Транспортные задачи линейного програм- О мирования малой размерности практически решаются вручную. Расчетные методы решения таких задач трудоемки и связаны с большим количеством вычислений.Известен прибор для построения много- д фокусных кривых - линейных функций ."ипеременных расстояний, в котором осуществляется моделирование линейной функции. наиболее близок к предлагаемому устройству по структуре.Целью изобретения является решение з- ,дач линейного программирования транспортного типа, Зто достигается тем, чтс устройство содержит ттпараллельных напрлвляч:и неподвижньми стойками со втулками вих основаниях, а также перемешаемых по направляощим элементам стоек со втулка, ми с фиксаторами их положения и передвижные ограничители переме цаемых стоек, Предлагаемое устройство механизирует процесс решения, исключая большую часть вычислении. На фиг, 1 показано предла ройство, обший вид; на фиг, 2 ший элемент с неподвижной и стойками,Предлагаемое устройство и бой набор одинаковых направи ментов 1, размешецных пара другому на общей раме, Кажд щий элемент выполнен в виде равномерной шкалой 2 и сквоTо всвоей рабо н:й длине. Й основашъхн.знравляюших элелинтов 1, на одном уро"не укрьчщены неподвижные стойки 3, на: надую из которых свободно но без излишнего задора, посажена втулка 4 с наружными кольцевыми канавками, расположеннаяпротив пророи нанравльпОшего эломснтаИ каждой нд прорезей помешено по перемелшаемой стойке 5 несу)цей свободно посаженную втулку 6 с наружными кольцевыми капавками и ручной пружинныйфиксатор 7 перемешаемой стойки. Г)еремешение стоек 5со втулками 6 ограничено передвижнымиограничителями 8, Между втулками 4 и 6разнесены нити 9 уложенные в кольцевые 5канавки втулок. Фиксация шагов нитей вканакак втулок 4 осуществляется обшимыдоижным плоским нругом 10, а фиксацияшагов нитей в канавках втулок 6 - кромками специальных планок 11, укрепленных 20на корпусах фиксаторов 7. На кромках прорезей направляющих элементов 1 полешены нружннные передвижные, индикаторы 12.Иитн ;. служат кажчая для имитации опредед,ний Лшейной функции из числа функционлн.пых ограничений лател 1 атическойЛИ 1 НЕ И ЗацаЧН И НОСтУнаЮт На УСтРОйетВОчс , счетчик длин нитей 13 с катушки 14,которая л 1 ожетбыть выполнена, например,из набор шпулек, фиксируемых одна отно- ЗОс юельно другой исе вместе - относительно корпуса катушки,Каждолу из переменных Х ( 1,2, И. )задачи соответствует свой направляк -шнй элемент 1 со втулками 4 п 6. Ограничидтели 8 ус 1 ановлены на положении шкал 2,соответствуюшем;аданныл пределам измене=ння переменных ХКаждое из заданных условиями функциональных ограничении. задачи имитированоотдельной нитью, которая должла быть практически нерастяжимой, Обшая длина участвуюших в имитации функционального,ограничения участков нити соответствует сумме значепий входяших в него переменных и измеяется в процессе решения задачи.Каждая из нитей подается с катушки 14 через счетчик 13 на втулку 4 соответствуюшей неподвижхой стойки 3, Огибает ее щ по четверти длины кольцевой канавки, поступает на втулку 6 перемещаемой стойки 5, Огибает ее по половине длины кольцевой ка,- навки и возвращается на ту же втулку 4, огибает с противоположной стороны четверть 56 длины кольцевой ее канавки и идет далеена следующую,пару втулок 4 и 6 другого элемента 1, соответствуюдего другому переменному, входящему в это же функциональное о 1 раничение,идачи. 60 Такил 1 образом, обведены нитью все пары втулок 4 и 6, относяшиося к одному и тому же функциональному Огрсц ичению.а последней нз втулок 4 нить, после огибания последней из втулок 6, фиксируется. В обшем случае, каждому из значений переменных Хсо ответствуют два участка нити Г 1 между втулками 4 и 6 одного и того же направляюшего элемента 1,0 бшая вытравленная . катушки 14 длина кити больше участвуюшей в имитации переменных ее длины на постоянную величину, равную сумме участков огибания нитью втчлок 4 и 6и участков перехода нити между втулками 4 разных Направляющих элементов, Эта, определяемая заранее величина, вычтена из показаний счетчика 13. На других кольцевых канавках втулок 4 и 6 аналогично имитированы другие функциональные, ограничения математической модели задачи линейного программирования.Функциональные ограничения, представляюшие собой равенства вида,Е Х = ХХ +а .+ Х =1) , 1=1 дп где Ь - постоянная величина, Х ) 0 имитированы в устройстве, какописаноьш 1 е, ннтяли, длины которых равны "О " (плюс - сумма постоянных по длине ее участков, не участвующих в имитации; также и везде в последуюшем изложении) в общем для всех функциональныхограничений задачи масштабе. Концы нитей фиксированы, а прн решении задачи они должны находиться в натяжении за счет перемешения втулок 6 на определенных направляюших элементах.Функ циональиые ограничения, представляющие собой неравенства типа меньше или равно 1" Х =Х +Х+Х ; и.йтакже имитированы нигями, длины которых равны " ", их концы также фиксированы, но в процессе решения они могут оставаться пенатяиутыми.Функциональные ограничения, представляюшие собой неравенства типа пбольшеили равно" Е Х = Х+Х +Хп ) ЙЯП Сгде Ц. - постоянная величина, имитированы нитями, длины которых взяты равными величинами О", одним своим концом зафиксированы на какой-либо из втулок 4, а другим - поданы на катушку 14 и могут потравлнваться с нее в процессе решения.Функпиональхые ограничения - двухсторонние неравенства тппа 3 ЪЕ Х "-Х +Х "+Х где Ь 1, Ь - постоянные величины, имитированы на устройстве нитями длин " О", а в проне се операций могут потрава Имв ся с катушки 14 незафиксированными своми кйц 1 с И ( 11 у)Ие Кцц 1 )сс сфи Ксцрс с -и),) до ,оп нг)тстцу)0 ицх длин " Ъ " (цлииг;,орст, стягивдт)ся от " Ь 1 " до1 "),Если на УстРойстве имц ГиРОвсПа систеЛ 1 с 11 осРс)ВГ)ИСТВ 1 ВИДа .м Х)3 5е. -1,2.,)г 1; 3 = 1,2, 5), 3 де )3 - подлежаиДя определецик Величшд, ГО ца него цоДс)ЦЬ И )ДфИКС)1 РОГ)саЕНв 1 ОДЦ 33; КОЦЦОМ Г ЦИтей одинаково) длины, другие концы котоРЫХ В ПРОЦЕССЕ РЕШЕНИЯ ПОТР ВЛЦВснотС 10( ии Выб)ра 10 тс 51) с кату 1 цк)1 все ОДнОВемецно на одинаковую длцлу.Функциональные ограничения типа1.". Х - . Х (множество перемен 1 е 1 1 1 е 1 1ме11)ыхразбито на подмножества 11 и 1511 ) имитируется ца устройстве каждоедвумя нитями, одД) конец каждой из которых зафиксировал, а двд другие ца катушку1 4. В процессе операций нить, соответстВующая обцей части 3)ердв)3 ствд ( 1 ) л 10-2жет потравливаться цд устройство либо одновременно и ца одииаковук длину с другойнитью ("1 "), либо Отдегц.еО от цее, которая в этом случае фиксиру.тс;яФуцкциоцдльцые огрдццчс цця - посто 5)ццые.,25раЗНОСтц ПЕрЕМЕц)ЫХ Х;ХО, "С 1 в -постоянная) 1- Х -Е Х - а имитируют.11 1 )И.ся ла устройстве ацалогич 1 ред )ду)лил;,ио с тем, отличием, что В цспессе оцераци Й должа с Охра)15)тьс 51 пост О яиц 01 ра зн и".30ца их длин а" и потравли)гПИ 5 Илп стягиВДНИЯ ЦИТЕЙ ПОРОЗНЬ ИСКЕЮЧЕ)ЕЫ: НИТИ ).,ьи "1 намотаны па кату)цку 14 бифилярно,Моделирова)Ид на устройстве условий за 35дачи линейного црогралМировдция заключается в реализации сцс:темы ее функциональных ограничений и получении допустимого плана решения задачи,Перед началом реализации системы ограничений нити 9 ца устройстве разнеселы по40втулкам 4 и 6 направляюших элементов 1,как описано выше, в соответствии с задаими функциональными ограничениями, но ленатянуты. Ограничители 8 поставлены на45шкалах 2 в положения соответствуюшие заданным пределам изменения каждой из переменных Х . Если нижний предел измененияпеременной - нуль (Х0), необходимостьв ограничителе 8 отсутствует, Втулки 6перемещаемых стоек находятся в нижних положениях (при Х 0) или на значениях шкал2, отвечаюших нижним пределам измененияпеременных, отличным от нуля (:" 3:1 )Реализация систем функциональных ограничений на устройстве в зависимости Отвида математической модели имеет своио. обенцости, Процесс поясняется на примере,амкнутой транспортной задачи линейногопрограммирования. 60 Задача, Имеется ггс пунктов производства однородного или взаимозаменяемого продукта и )1, пунктов его потребления. Заданы объем производства,й каждого )з пунктов производства и размеры спроса 1) саждого пункта Гютреблелия (в тех же единицах).Извест)11, также расходы С 1, св 5:юцные с ПЕРЕВОЗКОЙ ЕДИ)1 ЦЦЫ ЦРО 1 УКТЯв КажДОГО пункта цроизво)1 сгва в каждый цукт потреблеши.Х - КОЛИЧЕСТВО ЕДИЦИЦ ПРОГ 1 Уйтс),. ПОСтавляемое из какого-либо пункта ирои:1 водства ( 1 ) в какой-л 60 3 уцст иэтреблеьция (3 ); )( в О, Суммарные затраты наперевозку продукта из всех пунктов прои,)водства во все пункты потреб;еегия должцы6 ЬГГЬ М)ЦЦЕЛД ЛЬНЫ 31вв ь) =1Систсьма рдзцесец)ьх 1 д ( с ) 3)црсВЛЯК)ШИ; ЭЛЕЧЕЦТДХ УС )Р. йг ТЧ 3 Т й "и1И 11 Ц 1 ТЕИ 11ТДКОвс 1. 11 гь )ТУгки 4 и 6 каждого цап)авлш). О,)см;цТа В. Е 1 ДЯ П 1)ОХОД 5 Г, Цгь К)Д Йи. й Л 10 РЕ, 11 )5)ити, нринадле)к,ццие: одгд - ,;теме фуцкЦИОЦДЦН 1 вХ ОГРДЦИСЕЦИ)1 ( Л) , ДРУ)с) игистеме ограничений (;.). иэ обшей совоКУ 1 ТЦОСти ПОСтг)5 ЦПЫх ве)ПЧИЦ Г); ( 1 =12 ввв П 1 ) И)У ( ) .= 1,2, П. ) Г 1- бирают наимецьпу)о, сДоте)етс:Еуес)31)у)0 наиболее короткой пити, Ид ьццдя с напр;ьвля)оших элементов с цаил)е 3 вцпл)н, дая ыбрг)нного равенства зцачелиям коэффиццецтог)В ЛИ 5 е 5 цО 1 г 1 орл)г ( 1 )патягивде)ия лптц поочередцьм подъемом 15 туЛОК 6 В ВЕрХцИЕ ПрЕДЕ)ЕвЕ)1.Е ПО;Южсция, последовательно переходя к большим ьцичениям С . Когда цдцкрГтчдйцдя ццть ид 1тянута, переходит к натяжению си дую)пей в порядке Возраста)ги)1 Величн О,: и О ип 1 ти, Если В нОВОм и 1 режнел 1 фуцкП)01 ДЕь ных ограничениях цет обшего церемеццг 10, т. е, оба они относятся к одной и; сцсгсм (2) или ( 3), то натяжение это)1 нити осушествляют также, Если же В и рвом и втс 15 лограничениях имеется общая 1)ерсмеццд(нити имеют общий направляющий элемент 1), то натяжение начинают с соответствующейей втулки 6, опуская при необходимостиодновременно на ту же величину уже поднятые втулки 6, на которых натянута первая нить (или предыдушие нити), но имеющие наибольшие значения коэффициентов С ".Ранее натянутая нить(или, нити) при этом не ослабляется. До полного натяжении второй (или очередной) нити последовательно 10переходят к втулкам 6 с возрастающимикоэффициентами "С-", начиная с наименьшихцв данном равенстве, приводя их в верхние предельные положения, при необходимостиопуская ранее уже поднятые втулки 6 с большими, чем у поднимаемых втулок, значениями С, приводя их в нижние предельные положения. Ранее натянутые нити при этом не ослабляются.Точно также поступают при натяжении всех последующих нитей, но при этом из числа опускаемых втулок 6 исключают те, обе нити на которых (принадлежашие разным системам) уже находятся в натяжении.2 Ь Положение, втулок 6 на направляющих элементах, соответствующее натяжению всех нитей "О,и "Ъ , моделирует на устройсгве допустимый план решения задачи.Если по условиям задачи, вместо системы функциональных ограничений ( 3), на устройстве имитирована система равенств типа "меньше или равно"Е Х; 2, (=1,2, п 1(модель открытой транспортной задачи линейного грограммирования), то производят выше описанное натяжение нитей подъемом втулок 6, начиная с нитей лишь системы (2) "Ь " а к нитям "О обрашаются тогда,3когда они начинают препятствовать полному натяжению нитей "Ь ", При этом осушест-,1вляют описанные выше парные встречные перемешения втулок 6 на направляюших элементах, добиваясь натяжения всех нитейЬ .45Особенности реализации на устройстве сис- тем ограничений вида С, Х В С Х1 ет, юез,заключается, и следуюшем. Поскольку нити1и "1 " поступают на устройство сло 1женными вместе, они получают одинаковыеприращения длины, Подъемы втулок 6 в верх- ние предельные положения начинают с направляюших элементов 1, относяшихся к множеству 1 (в порядке нарастания козффициентов С). Если при натянутой нити 1припоследуюшем подъеме втулок 6,амотносяшихся к 1 длины нити оказывается недостаточно, нить 1 фиксируют, а нить21потравливают до ее натяжения втулка 1 60ми. Если на устройстве реализуется системаравенства видаХ .-м 1,загде а - постоянная величина, то автономныепотравливания или выбирания каждой из двухнитей недопустимыПолучение искомого решения задачи ввиде набора значений переменных-оптимизациядопустимого плана - заключается в установлении на устройстве их значений, обеспечиваюших в сумме максимум или минимум целевой функции при сохранении функциональных ограничений и ограничзний переменных.,Процесс решения поясняется па примереизложенной выше замкнутой транспортнойзадачи линейного программирования,На устройстве реализованы системы ограничений (2) и (3) нити натянуты; требуется определить минимум линейной формы (1)ВЪ Т1=2 ЕС. х . мин.Из числа направляющих элементов с поднятыми втулками выбирают два таких, чтобы у них не имелось общей нити и суммасоответствуюгцих им коэффициентов С линейной формы была при этом наибольшей.Пусть это будут, например, направляюшиеэлементы Хи Х, а нити с этих элементов моут быть натянуты на направляюших элементах Х и Х , втулки которыхне находятся в верхних йредельных положенчях а сумма соответствующих им коэффициентов С" меньше суммы первых двух,т, е,После выбора таких направляющих элементов, втулку направляюгцего элемента Х опускают. При этом натянутые на них нити й" и "Ь"ослабляются. Затем опускают втулку направляюгцего элемента Х,создавая слабину натянутых на нем нитей " й " и " Ъ ", а втулку элемента Х 1 одновременно поднимают,выбирая слабину нитей "а(с элемента Ж ) и "3" (с элемента Х ). В преде,пьных положениях1 Дфиксируют втулки Хи Х (если они их достигли), Оставшиеся ослабленными нити а " и " ц " натягивают подъемом втулки4элемента Х 4,которую фиксируют. Поскольк" и натягивались на одинаковые длины, соответствуюшие функциональные ограничения остались удовлетворяюшими условиям задачи, а значениелинейной формы (1) уменьши лось. /Далее аналогично выбирают следующуюпару поднятых втулок и пару втулок им соотвотству.ошую (включая и те направляю 1 циеэлементы, нити с которых ве были полностьюстщщты в предыдущем цикле)Оиисвнный выше процесс перетягивания нитей с одних пар элементов на другие, хщее выгодные, повторяют до исчерпавзцюб подобной возможности. При равенстве сумм пар коэффициентов С выбираемых элемен 3тов и осуществлении описанного цикла перетягиваний, выигрыша в уменьшении значенияЮ линейной формы не будет, но оказывается возможным исключить из решеввя одну из переменных. В ходе пикдвческих первгягиваний нитей ва направляющих элементах увеличиваетси числО опущенных в нижние положе р вин втулок элементов, соответствующих переменным с большими значениями коэффициентов С . В итоге на устройстве оогается предельное число (пффф=1) надрав дающих элементов с натянутыми ва их втул щ ках нитями, соответствующих базисным не известным, Без нарушения сжтемы ограничений уменьшить значение линейнойформы( 1) уже нельзя, искомое решение найдено, По шкалам 2 считают значения переменных Х" и, 5 подставляя их в выражение1), вычисляют искомый минимум. Производимые на устройстве циклы перетягиваний нитей явшпотся механической моделью используемых в решении транспортной задачи симплекс-методом циклов пересчета в матрицах, однако при работе на устройстве исключена необходимость в проведении вычислений ., составлении промежуточных таблиц и записи промежуточных таблиц и промежуточных результатов,Формула изобретенияУстройство для модещрования линейных функций В переменных, содержащее Ввтулок с наружными кольцевыми квнавками, установленных на стойках, и огибающие их нерастяжимые нити, о т л и ч а ю щ е ес я тем, что, с целью повьппения точности чоделировавия, оно содержит фпараллельных направлающвх элементов с равномерными шкалами, на основаниях которых размещены неподвижные стойки и передвижные ограничители, а к втулок на стойках выполнены перемещаемыми, каждая вдоль соответствующего направляющего элемента и снабжены фиксаторами их стоек.Составитель Е. Тимохина Редактор Л, Тюрина ТекредГ. РОдак корректор Д. Мельниченко Заказ 4849/832 Тираж 814 ЯовщсноеЦНИИПИ Государственного комитета Совета Министров СССРпо делам изобретений и открытий113038, Москва, Ж, Раушскаи наб., д, 4/8филиал ППП фПатент", г. Ужгород, ул. Проектнан, 4
СмотретьЗаявка
2002899, 01.03.1974
УПРАВЛЕНИЕ ГЕОЛОГИИ СОВЕТА МИНИСТРОВ ТУРКМЕНСКОЙ ССР
СЕРОВ ОЛЕГ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G06G 1/06
Метки: линейных, моделирования, переменных, функций
Опубликовано: 15.07.1976
Код ссылки
<a href="https://patents.su/6-521574-ustrojjstvo-dlya-modelirovaniya-linejjnykh-funkcijj-p-peremennykh.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования линейных функций “п” переменных</a>
Устройство для выпрямления переменного тока

Номер патента: 34070
Опубликовано: 31.01.1934
Автор: Масалов
Метки: выпрямления, переменного
...(фиг, 1 и 2). Таким образом, контактные пластины, расположенные симметрично по окружности горизонтального сечения резервуара, могут с помощью контактных зажимов соединяться с известными точками обмотки статора генератора. Расстояние между контактными пластинами и способы изоляции их друг от друга обусловливаются напряжением между ними.В центре кожуха располагается, какуже было отмечено, вращающийся переключатель 1. На нижнем конце вала,пропущенного через крышку, укрепленоконусообразное тело переключателя 8с проходящими через него изогнутымисоплами 9. Переключатель 8 сделан изизоляционного материала и нижней своей,частью опущен ниже уровня налитой надно кожуха ртути. Сопла представляютсобой металлические трубки, загнутыенаверху к стенкам...
Устройство для ориентирования стержнеобразных элементов, концы которых имеют отверстия различного диаметра

Номер патента: 882408
Опубликовано: 15.11.1981
Автор: Уго
МПК: B65G 47/04
Метки: диаметра, имеют, концы, которых, ориентирования, отверстия, различного, стержнеобразных, элементов
...толкателей 12 для возврата корпусов 4 из гнезд 5 обратно на подающий транс- Впортер, Основание 9 съемно смонтировано на валу б, который с целью ограничения вращения вала на угол не более чем 180 имеет храповик 13.и собачку 14. Перемещение собачки 14 регулируется синхронно с работой всего устройства, Соосно с возвращающими толкателями 12 с противоположной 5 стороны ориентатора 4 размещены контролирующие толкатели 15.Устройство для ориентирования стержнеобразных элементов, концы которых имеют отверстия различного диа метра, работает следующим образом.Когда корпус ручки 3 расположен в линию с толкателем 15 в положении, соответствующем не ориентированному положению, т.е. конец ручки 3 с меньшим диаметром отверстия обращен к...
Устройство связи агромоста с элементами главной нити опорного основания

Номер патента: 1773313
Опубликовано: 07.11.1992
Автор: Майсов
МПК: A01B 47/00
Метки: агромоста, главной, нити, опорного, основания, связи, элементами
...провода, пропущенного в отверстие вдоль корпуса 4 каретки, размещенной в том же трубчатом корпусе, а считывающий щеточный элемент 3 подпружинен пружиной 5 относительно, неизолированного провода и корпуса 4 каретки.Двухслойный трубчатый корпус состоит из внешнего жесткого 6 слоя (кожуха), например металлического, и внутреннего 7 - из эластичного материала. Считывающий щеточный элемент 3 и пружина 5 размеще ны в капсуле 8 и поджаты пробкой 9 с резьбой. В этом же корпусе 4 каретки, в капсуле 10 закреплена и совмещенная магнитная головка 11 записи и считывания сигналов управления смагнитной ленты 2 вместе с 10 преДварительным усилителем 12 и поджи-мающей пружиной 13.Корпус 4 каретки перемещается на подпружиненных роликах 14, а...
Устройство связи агромоста с элементами главной нити опорного основания

Номер патента: 1662376
Опубликовано: 15.07.1991
Автор: Майсов
МПК: A01B 3/74, A01B 49/00
Метки: агромоста, главной, нити, опорного, основания, связи, элементами
...только два ряда реперов, но и содержать другие сигналы автоматического управления работой моста, например, подавать в исполнительные механизмы агромоста сигнал, в каком месте земельного угодья необходимо приподнять с грунта сельскохозяйственные орудия, чтобы, например, не натолкнуться на поперечную дорогу, проложенную на земельном угодье для нужд вспомогательного обслуживающего транспорта, на трубопровод или иной предмет, который может находиться 25 ЗО 35 на агроугодье.Токосьем осуществляют подпружиненные щетки 9, находящиеся в корпусах кареток, приподнимающих шины 3 и 4 со дна труб 7 из эластичного изоляционного материала, в котором они находятся.Правильность движения каретки 17 обеспечивают обрезиненные опорные ролики 18 и прижимная...
Способ контроля обрыва нити и устройство для осуществления этого способа

Номер патента: 1097728
Опубликовано: 15.06.1984
Автор: Стржибрны
МПК: D01H 13/14
Метки: нити, обрыва, способа, этого
...Преимущество предлагаемого устройства состоит в том, что все электронные цепи помещены в корпусе пс-танова, вследствие чего достигаетсяпростая взаимозаменяемость остановов,также как и воэможность их размещения на машине на любом месте.На фиг. 1 представлен корпус останова; на фиг. 2 - электронная частьустройства; на фиг. 3 - крышка с укрепляющими средствами; на фиг. 4 -схема включения,Останов состоит из корпуса 1(фиг. 1), изготовленного из знтиабразивного материала, в верхней части которого создана канавка 2, которая направляет непоказанный контролируемый пучок волокон или нить. Перпендикулярно к направлению движенияпучка, в нижней части боковых стенканавки 2 помещены друг против дру3 1097 га источник 3 световых импульсов и...
Предыдущий патент: Устройство для управления рабочими постами
Следующий патент: Пневматическое вычислительное устройство
Случайный патент: Селектор радиосигналов точного времени