Способ измерения радиуса сферических поверхностей по стрелке шарового сегмента и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
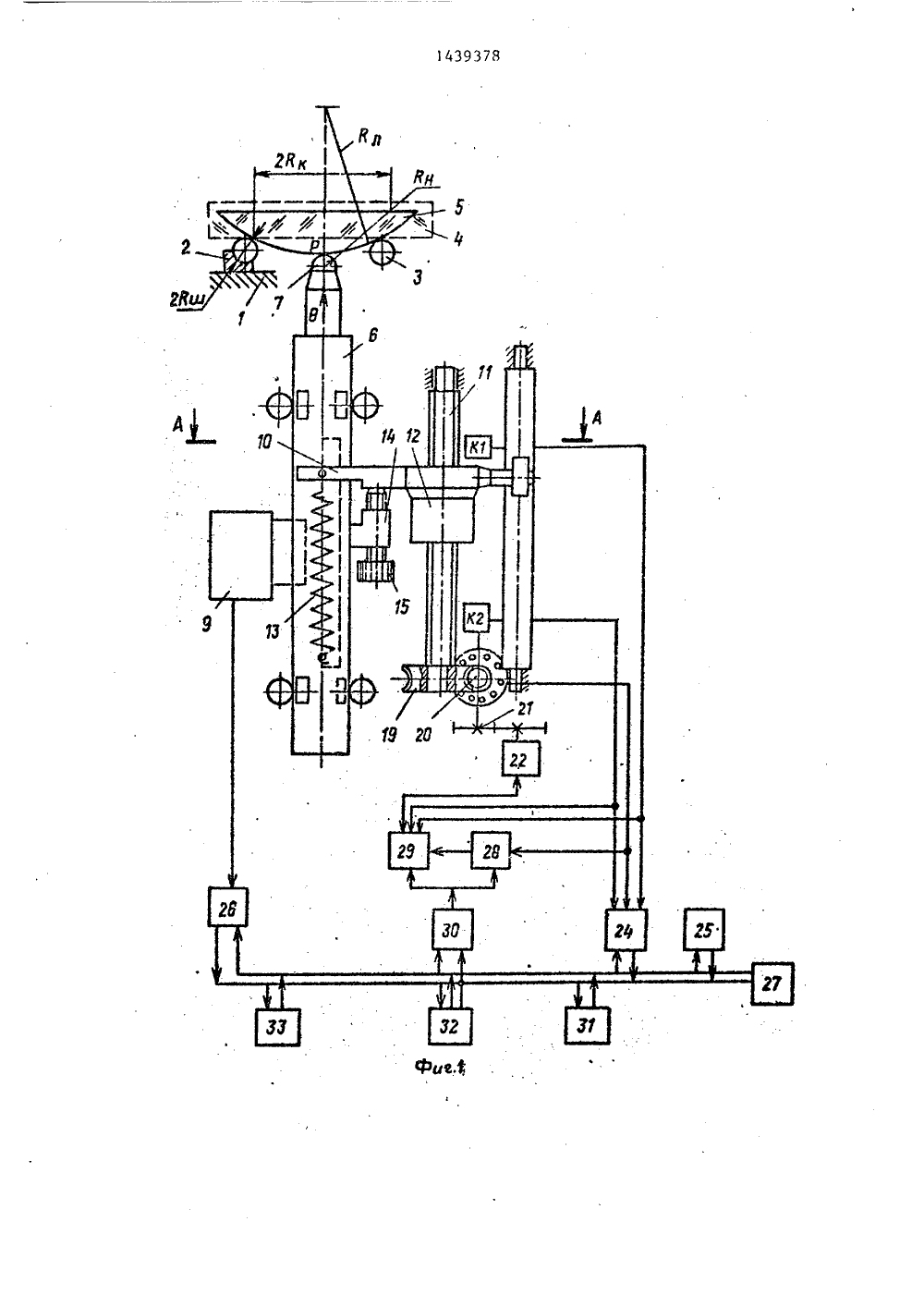
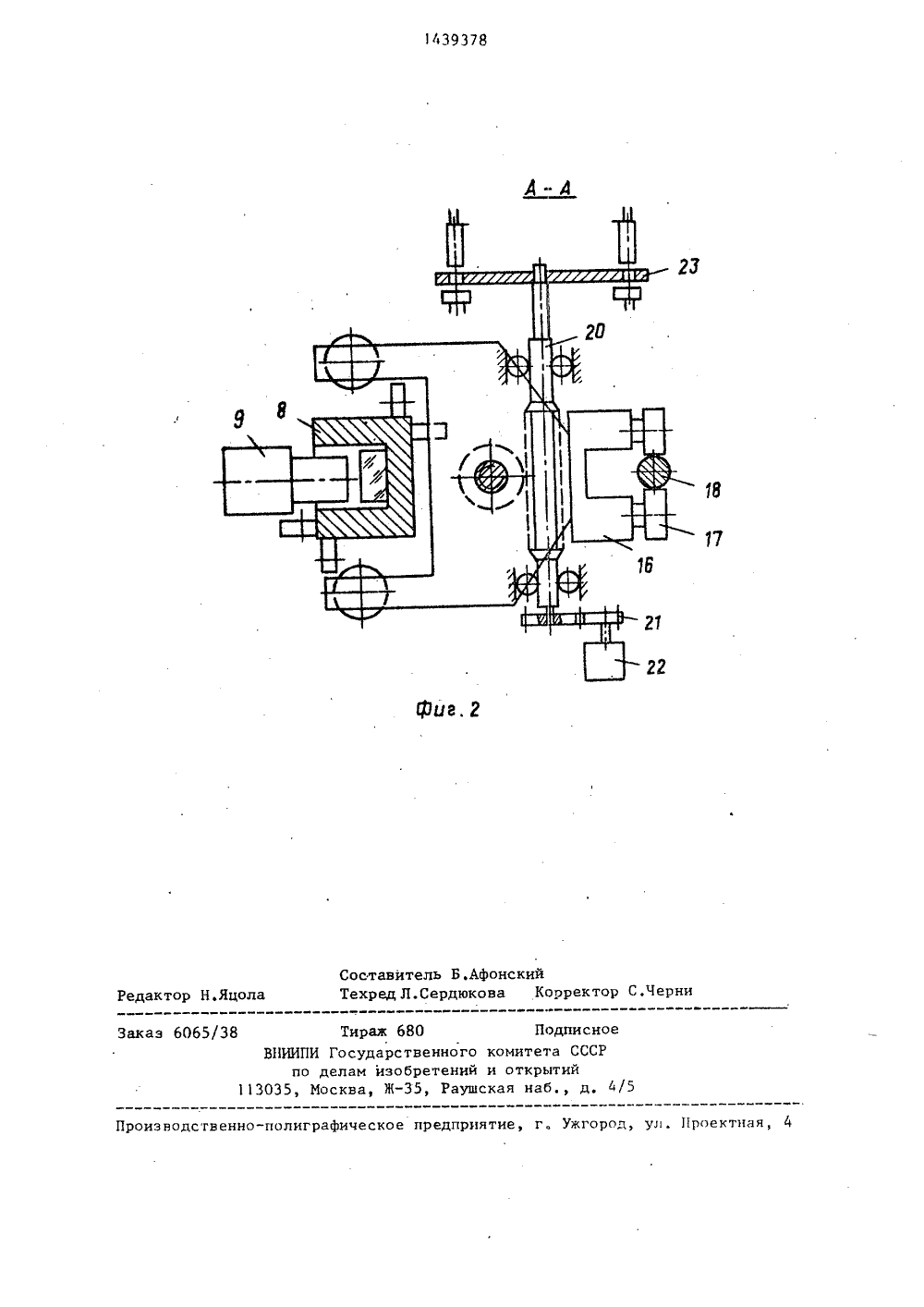
СОЮЗ СОВЕТСНИСООИАЛИСТИЧЕСНРЕСПУБЛИК 78 С 01 ВУ ИЗОБРЕТЕНИЯ ОПИСАН К АВТОРСКОМ Ю.С,Скворцов, еляев, Л.З.Дич, огомолов ъек птические из кола, 1981,средстваских поверй, в . Оптиксть, 1970 54) С ЕСКИХ ОГО С СУПЕС 57) И пеевВ ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПОДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ СВИДЕТЕЛЬСТВУ(56) Афанасьев В.А. Орения, у М.; Высшая шс.52-55.Никитин В.А. Методы имерения радиусов сферичекостей оптических деталемеханическая промьппленноУ О, с.57-62. ОСОБ ИЗМЕРЕНИЯ РАДИУСА СФЕРИПОВЕРХНОСТЕЙ ПО СТРЕЛКЕ ШАРОГМЕНТА И УСТРОЙСТВО ДЛЯ ЕГОВЛЕНИЯобретение относится к машиностроению, а именно к методам и средствам для измерения линейных размеров. Цель изобретения - повьппениеточности путем обеспечения воэможности исключения иэ результата систматической погрешности измерения,обусловленной неравенством контактных деформаций между опорами и обтом измерения и объектом измеренияизмерительным наконечником, Это достигается тем, что перед измерениемнастраивают измерительный наконечникна нормированное измерительное усилие, которое рассчитывается с учетомвеса детали, располагаемой на базирующих шариках. Перед измерением взапоминающий блок вводятся расчетныенормируемые усилия, на которые настраивается измерительный наконечникпри работе на устройстве, реализую"щем способ измерения. 2 с, н 1 з.п,ф-лы, 2 ил.Изобретение относится к машиностроению, а именно к средствам И ме.тодам для измерения линейных размеров.5Цель изобретения - повышение точности путем обеспечения возможностиисключения иэ результата систематической погрешности измерения, обусловленной неравенством контактных деформаций между опорами и объектом измерения, и объектом измерения и измерительным наконечником.На фиг.1 изображена конструктивная схема устройства для реализации 15способа измерения радиуса сферических поверхностей-по стрелке шаровогосегмента; на фиг.2 - сечение А-А наФиг.1,Устройство для измерения радиуса 20сферических поверхностей включает в1себя корпус 1, опорное кольцо 2 с шариками 3, расположенное на корпусе 1и предназначенное для установки нанем плоской пластины 4 или измеряе 25мой сферической детали 5, подвижнуюпиноль 6 с шаровым измерительнья наконечником 7 и шкалой 8, узел отсче"та перемещения пиноли 6, выполненный в виде датчика 9 линейных пере 30мещений, сопряженного со шкалой 8,механизм принудительного перемещенияпиноли б с кронштейном 10 П-образнойФормы, кинематически связанный с пинолью б, выполнен в виде ходового 35винта 11 с гайкой 12, жестко связанной с кронштейном 10, причем ось винта 11 параллельна оси пиноли 6, Узелподжатия измерительного. наконечника 7выполнен в виде двух цилиндрических 40пружин 13, расположенных параллель"но по обе стороны пиноли 6, которыеодними концами закреплены на пиноли6, другими - на кронштейне 10 механизма принудительного перемещения 45пиноли 6. Гайка 14 с регулировочнымвинтом 15 закреплена на пиноли 6 таким образом, что регулировочный винт15 кинематически связан с кронштейном 10 механизма принудительного пере 50мещения пиноли,С противоположной стороны кронштейна 10 закреплена вилка 16 (фиг,2) имеющая два шарикоподшинника 17, охватывающих цилиндрическую направляющую 18, ось которой параллельна оси винта 11 (фиг,1) и пиноли б. Винт 11 через червячное колесо 19, червяк 20 и цилиндрическую передачу 21связан с. исполнительным двигателем22. Со свободной стороны червяка 20(Фиг.2) установлен датчик 23 углового перемещения гайки 12, задающийвеличину нормированного измерительного усилия, Датчик 23 углового перемещения выполнен в виде диска с рядом отверстий и двумя парами светодиод - Фотодиод, Датчик 23 угловогоперемещения задает нормированное измерительное усилие на исполнительный двигатель 22 через преобразователь 24 информации перемещения гайки12, связанный с блоком 25 управления,и преобразователь 26 информации перемещения пиноли б через центральный процессор 27, являощийся управляющим вычислительным блоком, Выходдатчика 23 углового перемещения связан также с блоками 28 и 29 управления реверсом двигателя 22, Выход процессора 27 соединен с цифровым аналоговым преобразователем 30 управления реверсом двигателя 22 и запоминающими блоками 31 " 33 постоянного оперативного и перепрограммиру"ющего действия.Схема реверса двигателя 22 обеспе"чивается изменением полярности путемсоответствующего включения концевоговыключателя К 1 (верхнего ) или выключателя К 2 .(нижнего), а также вводакоманд с датчика 23 углового перемещения (Фиг.2).Датчик 23 углового перемещенияпересчитывает с помощью процессора27 нормированное измерительное усилие Я. в соответствуищее количестводискрет И перемещения гайки 12 винта 11 по математической зависимостиО - Ро.,где Ро - начальное измерительное уси"лие, задаваемое при настройке устройства регулировочным винтом 14 на пружины.12;,Р- измерительное усилие, соответствующее перемещению гайки )3 на одну дискрету.Значение Ро записывается заранее в память запоминающего устройства 32, Процессор 27 одновременно задает те; кущую координату Ь,. пиноли б на пре.образователь 24 информации перемещения пиноли 6 по математическому вы- ражениюЬ, К Игде К - поправочный коэффицент заФдаваемый оператором черезблок управления;Я - количество дискрет, находящееся в преобразователе 26 информации перемещения пиноли 6Момент касания измерительным наконечником 7 плоской пластины 4 определяется автоматически процессором 27, который расчитывает по введенному значению номинального радиуса измеряемой сферы К через блок 25 управления предполагаемую точку касания измерительного наконечника 7 пиноли б и к расчетной точке касания, автоматически вводят поправку на величину нормированного измерительного усилия.Устройство для осуществления преддагаемого способа работает следующим образом.Перед началом измерения определяют расчетные нормированные измерительные усилия Я по математической зави- симости(К,т К,) 1 Рл Кв) К нгде Ц - нормированное измерительное усилие, прикладываемому к измерительному наконечнику пиноли Р - вес детали, расположеннойна шариках опорного кольца; К - номинальный радиус измеряемой сферы;Рк - опорный радиус; К - радиус. шарика опорногокольца; К - радиус шарика измерительного Ннаконечника,Величина задаваемого нормированного измерительного усилия запоминается блоком 31 после ввода через блок 25 управления значений К, К я н К 1, а значение Кзапоминается блоком 32Процессор 27 расчетное нормированное усилие Я задает на датчик 23 углового перемещения.Затем устанавливают на шарики 3 опорного кольца 2 плоскую пластину 4. Включают блок 25 управления перемещения пиноли 6 с измерительным наконечником 7 с нижнего выключателя К 2 при помощи двигателя 22 до контакта с плоской пластиной. Движение передается от двигателя 22 через зубчатую передачу 21 на червяк 20, червячное колесо 19 и ходовой винт 11,по которому перемещается гайка 12,жестко связанная с кронштейном 10.Кронштен 10 через двепружины 13 10 передает усилие на пиноль 6, Начальное измерительное, усилие, создавае"мое регулировочным винтом 15, обеспечивает усилие натяжения пружины 13так, чтобы оно в начальном положении 5 превышало вес пиноли б, но не былобы большим минимального усилия (на"пример, 0,5 Н), и тем самым, обеспечивают силовое взаимодействие пинали6 с кронштейном О.20 Одновременно с измерением перемещения пиноли 6 по датчику линейныхперемещений и передачей информациив преобразователь 26 информации перемещения пиноли 6 производится наст ройка измерительного наконечника нанормированное измерительное усилиеперемещением гайки 12 по преобразователю 24 информации перемещения гайки,1связанному с датчиком 23 углового пе ремещения. Последний через преобразователь 24 сигнализирует на блокеуправления световым сигналом о достижении нормированного измерительного усилия на измерительном наконечнике 7 пнноли 6 при контакте его сплоской пластиной 4, Процессор 27запоминает первый отсчет положенияпиноли 6 по датчику 9 линейных перемещений. Затем отводят измерительный 40 наконечник 7 в исходное положение,снимают пластину 4 с шариков 3 опорного кольца 2, устанавливают измеряемую сферическую деталь 5 на шарики3 и вводят новое нормированное усилие с учетом массы измеряемой сферической детали 5 в последовательности, аналогичной введению нормированного измерительного усилия на плоскую пластину 4. Повторно перемещаютс блока 25 управления пиноль 6 до касания измерительного наконечника 7пиноли 6 со сферической поверхностьюдетали 5. Процессор 27 запоминает второй отсчет положения пиноли 6 и спомощью запоминающих устройств 32 и33 по программе вычисляет стрелкушарового сегмента и радиус сферической поверхности по следующим математическим зависимостям:3 бт для выпуклой поверхностиКк+2 Ь, 2 шфгде К- радиус кривизню выпуклой 5сферической детали;тт=1 а-Ь, - ИЗМЕРЕННаЯ СтРЕЛКа ВЬПУКлой сферической поверхности;Ь и и - отсчеты двух положений пи 1 бноля при касании измерительного наконечника выПУКЛОЙ И ПЛОСКОЙ ПОВЕРХностей;К- опорный радиус;К,т, - радиус шарика опорногокольца,для вогнутой поверхностигР.к 1.1г+ - +Кцэгде К- радиус кривизны вогнутойсферической детали;г=Ь, -Ь, -ОтСЧЕтц ДВУХ ПОЛОжЕНИЛпиноли при касании измери" 2 тттельного наконечника вогнутой и плоской поверх-ностей,Формула и з обретенияСпособ измерения радиуса сйери -,"бческих поверхностей по стрелке шарового сегмента, заключающийся н том.что устанавлива 1 от на шарики опорногокольца плоскую пластину, с измерительным усилием вводят с ней в контактизмерительный наконечник, определяютрасстояние от исходного положения из-.мерительного наконечника до точки ка-.сания последним плоской пластины, от-.водят измерительньвл наконечник отплоской пластины в исходное положение, снимают пластину с шариков опорного кольца, устанавливают измеряемуттсферическую деталь сферои на шарикиопорного кольца, вводят н контакт сосферической поверхностью измерительный наконечник, определяют расстояние от исходного положения измерительного наконечника до точки касания последним сферической понерхнос 50ти, и используют данные об измеренных расстояниях для определения радиуса сферической поверхности, о т -л и ч а ю щ и й с я тем что, сцелью повышения точности путем обеспечения возможности исключения изрезультата систематической погрешности измерения, обусловленной неравенством контактных деформаций междуопорами, объектом измерения и изме- РИТЕЛЬтЫ 1 т ЦЯКОНЕЧНИКОМ, НаСтРЯИНакт измерительцый наконечник на нормированное измерительное усилие, как петэед БВОдом н контакт с пл 10 ской пляСТИНОй, "ЯтС И ПЕРЕД ННОЦОМ Н КОНтаКтСО СгаРИттЕСКОй ПОВЕРХНОСТЬа Я НОРМИРОНа 1 ЛтЛОЕ ИЗМЕР 11;: ЕгтЬНОЕ Усит 1 ИЕкяэ:;дьЙ раз ряссчцтыняют го математитэЕС 1,",ОЙ ЗЯВИСИМОСт.т; л;К 1)2., (К,-К) К,)нес детали, расположеннойна шариках Оцорн 01 0 кольца;,Э.гтг 11гтагг 1 Я 1 . Еоп Е 1 Ь 10 ГО 11 ЯКОНЕЧЛЬ 1 КЯ,: Тт;111 г т".О;тт;т 1. д,тг т;". -Ня;Эядиуся сферц 1 ескттх поеэхцт стей цо стрелке шароново сегмецта, содержащее корПЧС, ОЦО 110Кг:1 Т:Цт т.: ШЯГИКЯКИ э РЯСПО-, г, 1 Э,. 11 Я 1 Ортцусн цо.,вижнуш Пи 1;Ет;цгтт:;Отл т-,.; а-тсгЛ т;СТ;.; ттОНЛЕ 1 Л 11 утр Н РЕМЕЩЕНИЯ ПЦт 1011 И. 0 Т Л И Ч Я Ю Щ Ее с я тем, что,. с целью повышенияточности путем Обесптечет;ия нозможносГИ 1 ЯСТРОЙКтЛ 11 ЗЬ 1 ЕРИТЕЛЬНОГО НЯКОНЕЧ- ника ьа нормцронанное измеритсльное уС 1 ЛИЕ УЗЕЛ 1 сджаТИЯ ИЗМЕр 11 ТЕЛЬНОГО наконечника выполнен н ниде двух щлЛИНДРИЧЕСКИХ ПЭтГКИН РасцоложЕННЫХ параллельно цо Обе стороны пиноли, КОТОРЬЕ СДНИМИ КОНЦЯМИ ЗаКРЕПЛЕНЫ На пицоли, .дтэугими : на ктэонштейне механизма принудительного перемещения пиноли гайки с регулироночным винтом, з-крепленной на пиноле таким образом, что регулироно 1 ный винт кинематически связан с кронштейном механизма принудительного перемещения пиноли,. 3. Устройство ПО п 2, о т л и ч аю щ е е с я тем, что механизм прину" дительного перемешения пиноли выпол. - нен винтаныэ 1 Ось винта которого па" раллельна оси пиноли,1;ОтттУСЕ гО.т 100110 РНЫМ КО.ЬЦОМ 7 ЗЕЛ1 л 0.жятия 1 зме э 1 те 1 Ьтсго ьтак 01 лечн 1.кяМЕ 1;ЯН;.1 ЗМ ЦЭИ 1:тцгИТЕЦЬН 010 11 ЕРЕМЕЩЕНИЯПИНОЛИ С КРОН:Г."ЕЙттОМ т КИЦЕМа.ТИЧЕСКИС 1 ЯЗЯ 1 ЛьтЬ 1."1 С - .ИЦОЛЬЮ,. УЗЕЛ О". СЧЕТа ПЕ 14393781439378 Д е Д г,Сост ий Корректор С,Черни ель он едактор Н.Яцола ехред Л.Сердюков Тираж 680 Государственно делам изобретен осква, Ж, Ра Заказ 606 Подпи 1 ИИП итета ССткрытий о й 1303 кая наб.,знодственно-полиграфическое предприятие, г. Ужгород, ул. Нроектна
СмотретьЗаявка
3924768, 04.07.1985
ПРЕДПРИЯТИЕ ПЯ А-1705
РУКАВИЦЫН НИКОЛАЙ НИКОЛАЕВИЧ, СКВОРЦОВ ЮРИЙ СЕРГЕЕВИЧ, ДАНИЛЕВИЧ ФРИДРИХ МОИСЕЕВИЧ, БЕЛЯЕВ ВЛАДИМИР ИВАНОВИЧ, ДИЧ ЛЕВ ЗАХАРОВИЧ, ПОНКРАТОВ АНАТОЛИЙ НИКОЛАЕВИЧ, БОГОМОЛОВ ВАДИМ НИКОЛАЕВИЧ, ПЕСЛЯК АЛЕКСЕЙ ЕВГЕНИЕВИЧ
МПК / Метки
МПК: G01B 5/22
Метки: поверхностей, радиуса, сегмента, стрелке, сферических, шарового
Опубликовано: 23.11.1988
Код ссылки
<a href="https://patents.su/6-1439378-sposob-izmereniya-radiusa-sfericheskikh-poverkhnostejj-po-strelke-sharovogo-segmenta-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения радиуса сферических поверхностей по стрелке шарового сегмента и устройство для его осуществления</a>
Устройство для крепления штангенциркуля при шлифовании радиуса измерительных поверхностей

Номер патента: 1407766
Опубликовано: 07.07.1988
МПК: B24B 11/00
Метки: измерительных, крепления, поверхностей, радиуса, шлифовании, штангенциркуля
...в продольном и поперечном направ, ениях. На шпиндель 3 поворотной голов- и 1 крепится сменная зажимная оправа 4, соответствующая номенклатуре обра. 15 атываемых инструментов например, штаненциркулей, имеющих толщину губок 4 мм).правка имеет два цилиндрических подпруиненных фиксатора 5, способных убиратья и не препятствовать смыканию губок (тангенциркуля, Образующие фиксаторов очно совпадают с осью зажимной оправки 4, ва прижима 6 служат для зажима гуок обрабатываемого штангенциркуля 7 неависимо друг от друга на установочной плоскости 8. 25 Устройство работает следующим образом.Обрабатываемый штангенциркуль 7 уста,навливается на зажимной оправке на установочной плоскости 8 так, чтобы плоскость разьема губок точно совпадала с осью...
Способ определения погрешностей измерения перемещений подвижных органов координатно-измерительной машины

Номер патента: 1420339
Опубликовано: 30.08.1988
Авторы: Винцявичюс, Минетас, Палявичюс
МПК: G01B 5/008
Метки: координатно-измерительной, органов, перемещений, погрешностей, подвижных
...сис темы управления в данной КИМ, Послечего с использованием ЭВМ определяютлинейные и угловые погрешности измерения перемещения в каждой позициипри помощи следующей системы уравнений:(1 у, т 22) Ю(У Ву) тгде 1 к у1 к,у тр1 у,- результаты измерения3 1 ф 3длины концевой меры вт-й позиции в первом,втором и третьем положениях соответственно,г Ту - ЛИНЕйНаЯ ПОГРЕШНОСТЬизмерения перемещенийв 1-ой позиции координатной оси У,тт К, уК - угловые погрешностиизмерения перемещенийпо осям 2 и Х в -ойпозиции координатнойоси 1,1 х - расстояние от цаправут ттоляющей 3 координатнойоси у до точки началакоординат;2 - расстояние от направу фляющей координатнойоси 2 до точки началакоординат,Х ХХ,2 т, 27, 2 З координата кольцевой меры длины в первом, втором и...
Способ измерения радиуса кривизны сферической поверхности оптической детали

Номер патента: 1747882
Опубликовано: 15.07.1992
Автор: Бакеркин
МПК: G01B 11/24
Метки: детали, кривизны, оптической, поверхности, радиуса, сферической
...кривизны Й оптической детали, а также ход лучей при фокусировке коллимированного излучения в вершину детали 1,На фиг, 2 показано положение детали 1. мениска 2 и объектива 3 и ход лучей при фокусировке излучения объективом 3 в вершину выпуклой поверхности мениска 2,На фиг, 2 показано положение детали 1 и объектива 3 и ход лучей при фокусировке излучения объективом 3 в вершину детали 1,Перед оптической деталью 1, радиус кривизны поверхности которой необходимо измерять, располагают телескопический мениск 2 (фиг. 1), Телескопический мениск 2 установлен с возможностью смещения вдоль оптической оси 001, Затем по оптической оси 001 направляют коллимированное излучение. Источником коллимированного излучения может быть автоколлиматор,...
Интерференционный способ контроля радиуса кривизны оптических сферических поверхностей

Номер патента: 1810750
Опубликовано: 23.04.1993
МПК: G01B 11/24
Метки: интерференционный, кривизны, оптических, поверхностей, радиуса, сферических
...способ.Способ осуществляется следующим об-разом,Перед контролируемой поверхностью 1устанавливают пропускающую образцовуюголограмму 2, которую освещают соосный сней когерентный коллимированный пучком3 света, С помощью голограммы 2 в ее симметричных порядках дифракции, например,в+1-м и 1-м, +2-м и -2-м и т,д., в проходящемсвете из пучка 3 формируют два направленных на поверхность 1 гомоцентрических когерентных пучка 4, 5 света с центрами,соответственно 6 и 7, расположенными нарасчетном расстоянии 2 Р один от другого.Ручки 8, 9 света с.центрами 10, 11 соответственно, полученные отражением от повер- .хности 1 пучков 4 и 5 соответственносовмещают на голограмме 2, Возникающиепри совмещении пучков 8, 9 интерференционная картина...
Интерференционный способ контроля радиуса кривизны оптических сферических поверхностей

Номер патента: 1830445
Опубликовано: 30.07.1993
МПК: G01B 11/24
Метки: интерференционный, кривизны, оптических, поверхностей, радиуса, сферических
...Направляют пучок 8 света на поверхность 4 и полученный из него отражением от нее пучок 12 света с центром 11 направляют на голограмму 2, спомощью которой преобразуют его в прошедшей сквозь голограмму 2 в обратном свете ходе лучей квазиколлимированный пучок 14 света,Направляют пучок 9 на поверхность 4 и получают из него отражением от поверхности 4 пучок 15 с центром 16 направляют на голограмму 3, с помощью которой преобразуют его в прошедший сквозь голограмму 3 в обратном ходе лучей квазиколлимированный пучок 17 света, Совмещают с эталонным пучком б света оба пучка 14, 17 и регистрируют с помощью светоделителя 18 и объектива 19 на экране 20 одновременно две интерференционные картины 21, 22 сопоставляют их и по взаимному...
Предыдущий патент: Устройство для измерения поперечного радиуса и отклонений поперечной формы дорожек качения колец шарикоподшипников
Следующий патент: Устройство для определения угла наклона
Случайный патент: Способ возделывания сельскохозяйственныхкультур