Способ коррекции ошибки следящего привода с управляемыми звеньями в системах программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1352455
Автор: Арсенов

Текст
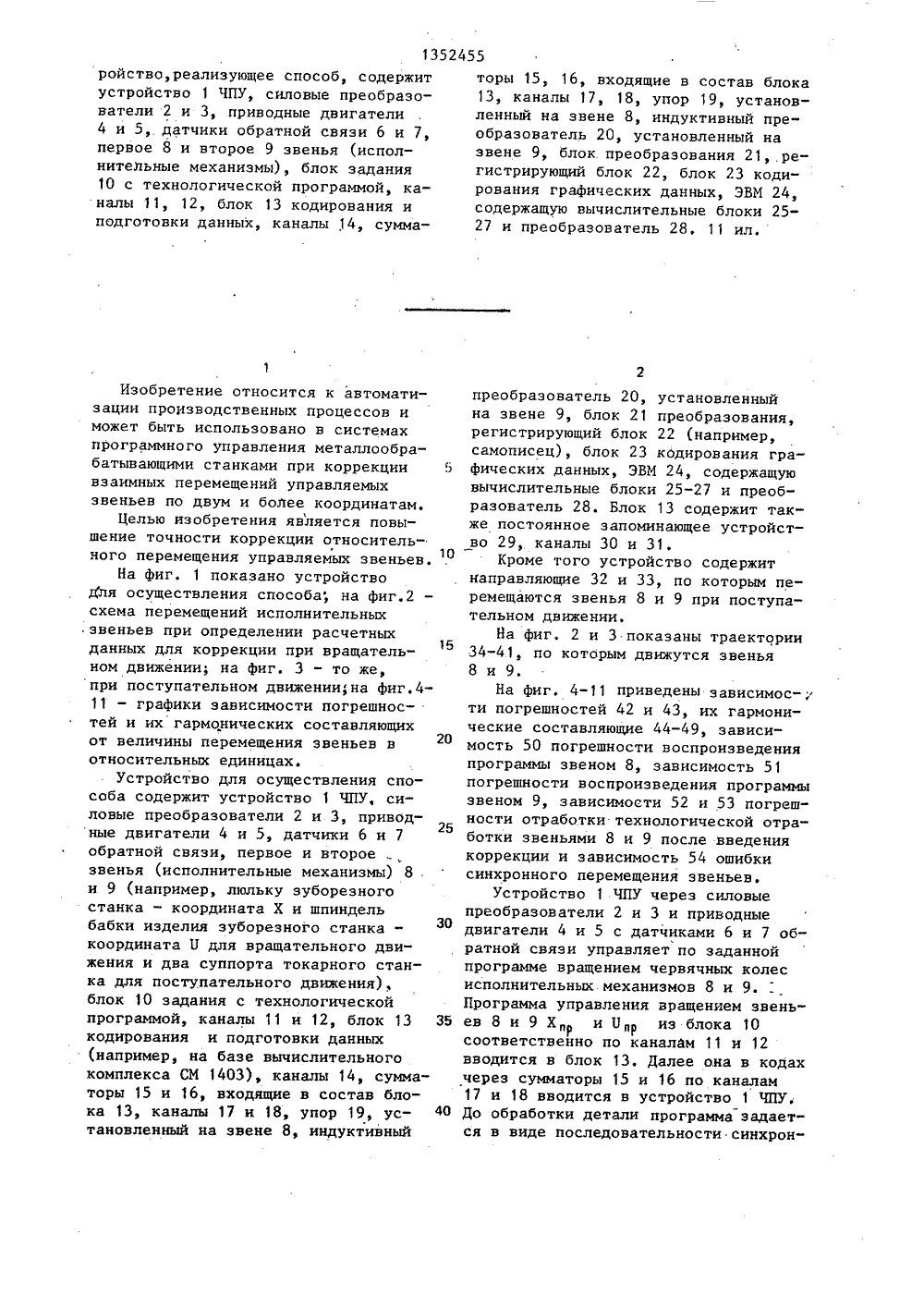
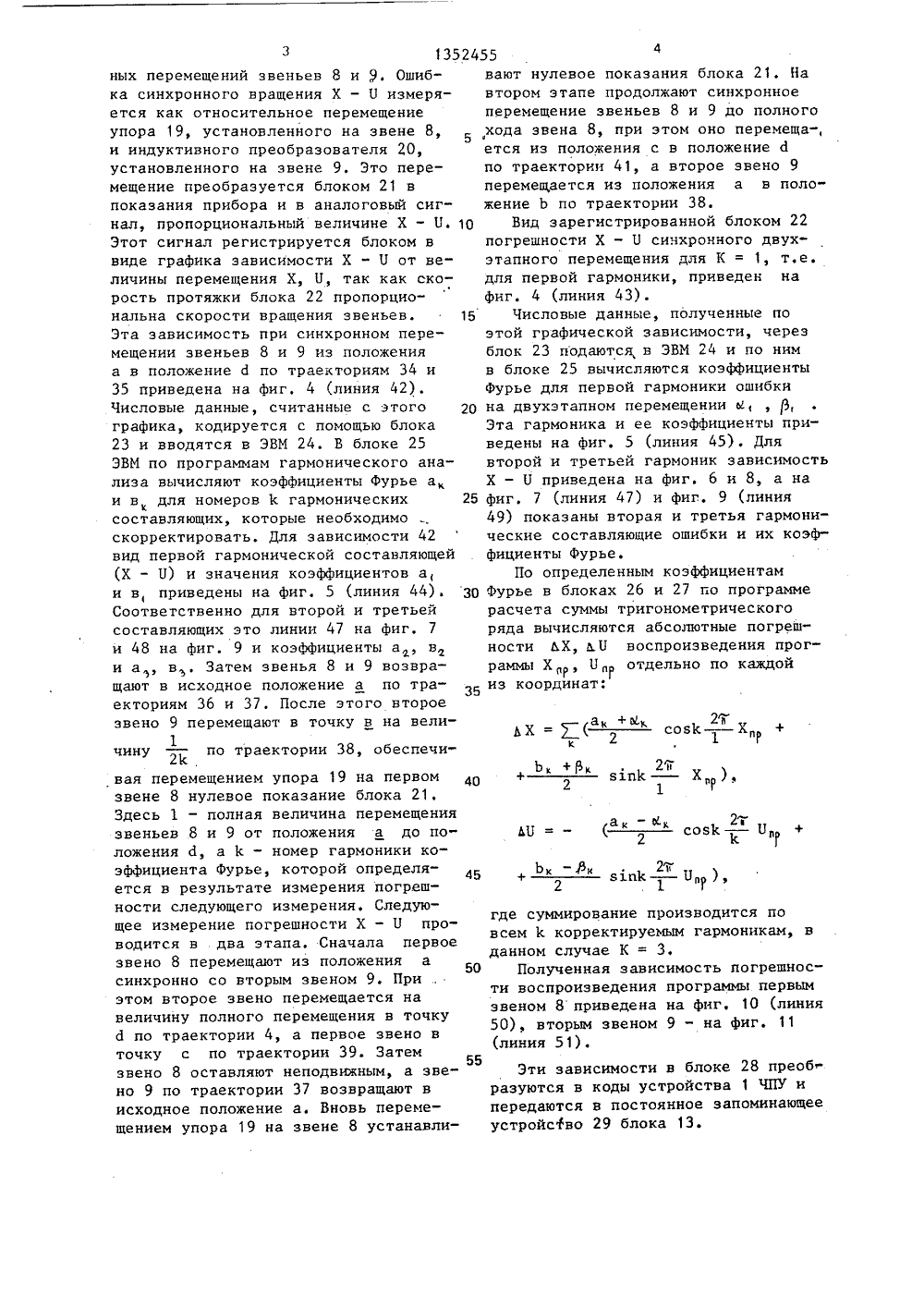
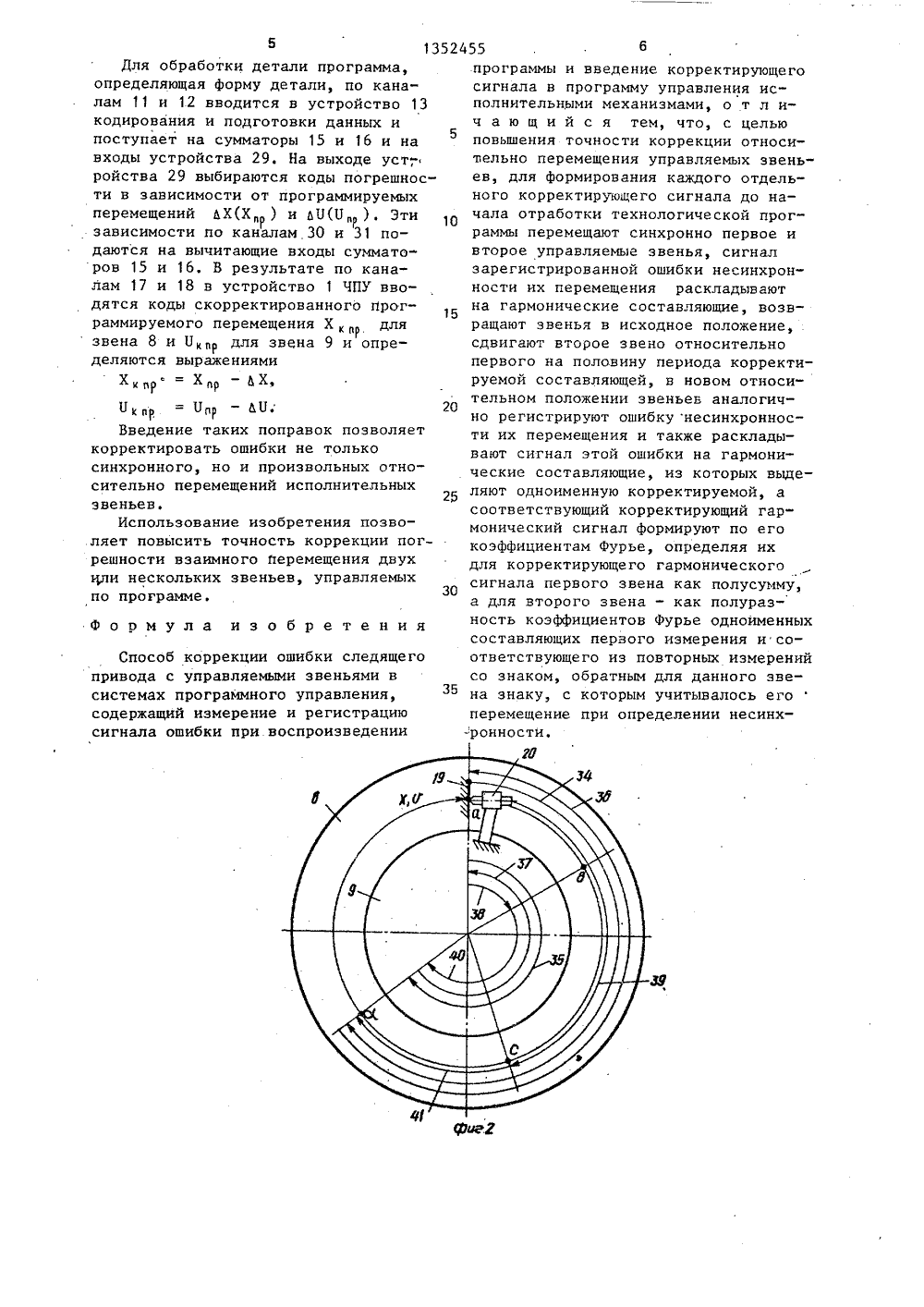
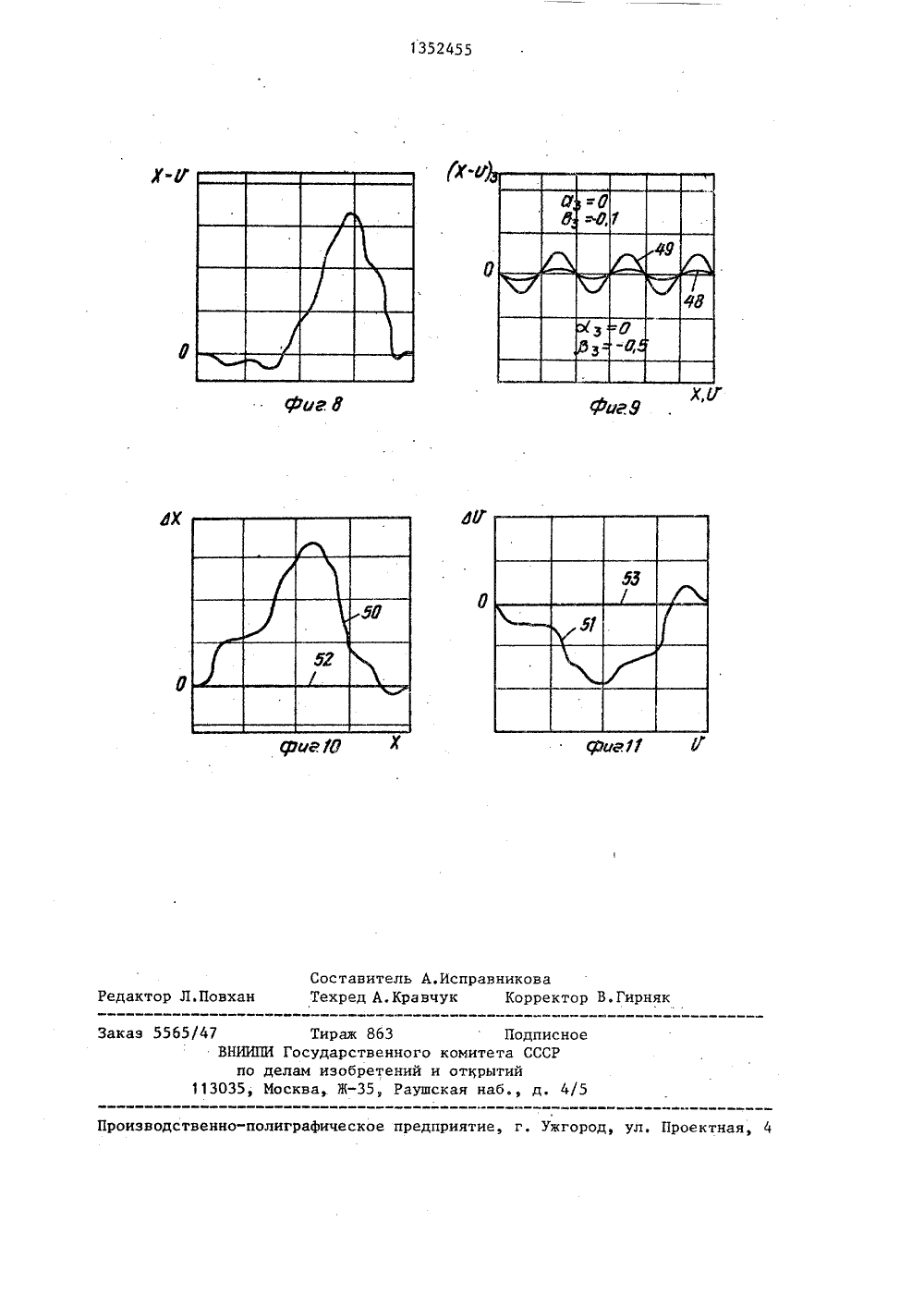
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХ 245 УБЛИ 59 4 С 05 В 1 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙОПИСАНИЕ ИЗОБРЕТЕНИ(54) СПОСОБ К ЩЕГО ПРИВОДА В СИСТЕМАХ ПР (57) Изобрет тизации прои и может быть программного батывающими взаимных пер звеньев по д Целью изобре точности кор ремещения ух ециальное ообрабатыв(21) (22) (46) (71) рукт стан (72) (53) (56) У 296 3874929/24-2426.03.851511,87. БюлСаратовское срское бюро зуовС.А.Арсенов621.503.55(08Авторское сви082, кл, С 05 ОРРЕКЦИИ ОШИБКИ СЛЕДЯС УПРАВЛЯЕМЫМИ ЗВЕНЬЯ ОГРАММНОГО УПРАВЛЕНИЯ ние относится к автома водственных процессов использовано в система управления металлообра танками.хри коррекциимещений управляемых . ум и более координатам ения является ховышени рекции относительно пеавляемых звеньев. Уст1352455 35 40 ройство,реализующее способ, содержитустройство 1 ЧПУ, силовые преобразователи 2 и 3, приводные двигатели4 и 5, датчики обратной связи 6 и 7,первое 8 и второе 9 звенья (исполнительные механизмы), блок задания10 с технологической программой, каналы 11, 12, блок 13 кодирования иподготовки данных, каналы 14, суммаИзобретение относится к автоматизации пронзводственных процессов и может быть использовано в системах программного управления металлообрабатывающими станками при коррекции взаимных перемещений управляемых звеньев по двум и более координатам.Целью изобретения является повышение точности коррекции относительного перемещения управляемых звеньев.На фиг. 1 показано устройство для осуществления способа; на фиг.2 - схема перемещений исполнительных звеньев при определении расчетных данных для коррекции при вращательном движении; на фиг. 3 - то же, при поступательном движении,на фиг,4- 11 - графики зависимости погрешностей и их гармонических составляющих от величины перемещения звеньев в относительных единицах.Устройство для осуществления способа содержит устройство 1 ЧПУ, силовые преобразователи 2 и 3, приводные двигатели 4 и 5, датчики 6 и 7 обратной связи, первое и второе звенья (исполнительные механизмы) 8 . и 9 (например, люльку зуборезного станка - координата Х и шпиндель бабки изделия зуборезного станка - координата П для вращательного движения и два суппорта токарного станка для поступательного движения), блок 10 задания с технологической программой, каналы 11 и 12, блок 13 кодирования и подготовки данных (например, на базе вычислительного комплекса СМ 403), каналы 14, сумматоры 15 и 16, входящие в состав блока 13, каналы 17 и 18, упор 19, установленный на звене 8, индуктивный торы 15, 16, входящие в состав блока 13, каналы 17, 18, упор 19, установленный на звене 8, индуктивный преобразователь 20, установленный на звене 9, блок преобразования 21, регистрирующий блок 22, блок 23 кодирования графических данных, ЭВМ 24, содержащую вычислительные блоки 25- 27 и преобразователь 28. 11 ил. преобразователь 20, установленныйна звене 9, блок 21 преобразования,регистрирующий блок 22 (например,самописец), блок 23 кОдирования графических данных, ЭВМ 24, содержащуювычислительные блоки 25-27 и преобразователь 28. Блок 13 содержит также постоянное запоминающее устройство 29, каналы 30 и 31,Кроме того устройство содержитнаправляющие 32 и 33, по которым перемещаются звенья 8 и 9 при поступательном движении.На фиг. 2 и 3 показаны траектории 534-41, по которым движутся звенья8 и 9.На фиг, 4-11 приведены зависимос-,ти погрешностей 42 и 43, их гармонические составляющие 44-49, зависимость 50 погрешности воспроизведенияпрограммы звеном 8, зависимость 5 1погрешности воспроизведения программызвеном 9, зависимости 52 и 53 погрешности отработки технологической отработки звеньями 8 и 9 после введениякоррекции и зависимость 54 ошибкисинхронного перемещения звеньев.Устройство 1 ЧПУ через силовыепреобразователи 2 и 3 и приводныедвигатели 4 и 5 с датчиками 6 и 7 обратной связи управляет по заданнойпрограмме вращением червячных колесисполнительных механизмов 8 и 9. Программа управления вращением звеньев 8 и 9 Хи П из блока 10соответствейно по каналам 11 и 12вводится в блок 13. Далее она в кодах через сумматоры 15 и 16 по каналам17 и 18 вводится в устройство 1 ЧПУ; До обработки детали программа задается в виде последовательности синхрон(ак к2 к 82 1 Пр ) э Эти зависимости в блоке 28 преобразуются в коды устройства 1 ЧПУ ипередаются в постоянное запоминающееустройство 29 блока 13. 3 13524 ных перемещений звеньев 8 и 9, Ошибка синхронного вращения Х - Б измеряется как относительное перемещение упора 19, установленного на звене 8, и индуктивного преобразователя 20, установленного на звене 9. Это перемещение преобразуется блоком 21 в показания прибора и в аналоговый сигнал, пропорциональный величине Х - Б. 10 Этот сигнал регистрируется блоком в виде графика зависимости Х - У от величины перемещения Х, Б, так как скорость протяжки блока 22 пропорциональна скорости вращения звеньев. 15 Эта зависимость при синхронном перемещении звеньев 8 и 9 из положения а в положение й по траекториям 34 и 35 приведена на фиг. 4 (линия 42). Числовые данные, считанные с этого 20 графика, кодируется с помощью блока 23 и вводятся в ЭВМ 24. В блоке 25 ЭВМ по программам гармонического анализа вычисляют коэффициенты Фурье а и в для номеров 1 гармонических 25 составляющих, которые необходимо скорректировать. Для зависимости 42 вид первой гармонической составляющей (Х - Б) и значения коэффициентов а, и в приведены на фиг. 5 (линия 44). ЗО Соответственно для второй и третьей составляющих это линии 47 на фиг. 7 и 48 на фиг. 9 и коэффициенты а, в и а, вЗатем звенья 8 и 9 возвращают в исходное положение а по траекториям 36 и 37. После этого второе звено 9 перемещают в точку в на вели 1чину - по траектории 38 обеспечи 21 с1 вая перемещением упора 19 на первом звене 8 нулевое показание блока 21. Здесь 1 - полная величина перемещения звеньев 8 и 9 от положения а до положения Й, а К - номер гармоники коэффициента Фурье, которой определяется в результате измерения погрешности следующего измерения. Следующее измерение погрешности Х - Б проводится в два этапа. Сначала первое звено 8 перемещают из положения а синхронно со вторым звеном 9. При этом второе звено перемещается на величину полного перемещения в точку й по траектории 4, а первое звено в точку с по траектории 39. Затем звено 8 оставляют неподвижным, а звено 9 по траектории 37 возвращают в исходное положение а. Вновь перемещением упора 19 на звене 8 устанавли 55вают нулевое показания блока 21, На втором этапе продолжают синхронное перемещение звеньев 8 и 9 до полного хода звена 8, при этом оно перемеща-, ется из положения с в положение й по траектории 41, а второе звено 9 перемещается из положения а в поло" жение Ь по траектории 38Вид зарегистрированной блоком 22 погрешности Х - У синхронного двух- этапного перемещения для К = 1, т.е. для первой гармоники, приведен на фиг. 4 (линия 43).Числовые данные, полученные по этой графической зависимости, через блок 23 подаются, в ЭВМ 24 и по ним в блоке 25 вычисляются коэффициенты Фурье для первой гармоники ошибки на двухэтапном перемещенииЭта гармоника и ее коэффициенты приведены на фиг. 5 (линия 45). Для второй и третьей гармоник зависимость Х - Б приведена на фиг. 6 и 8, а на фиг, 7 (линия 47) и фиг 9 (линия 49) показаны вторая и третья гармонические составляющие ошибки и их коэффициенты Фурье.По определенным коэффициентам Фурье в блоках 26 и 27 по программе расчета суммы тригонометрического ряда вычисляются абсолютные погрешности йХ, еБ воспроизведения программы Х , Б,р отдельно по каждой из коордйнат: АХ=, (" " соз 1 с Х + а, +, 2 Т 2 1где суммирование производится по всем Е корректируемым гармоникам, в данном случае К = 3.Полученная зависимость погрешности воспроизведения программы первым звеном 8 приведена на фиг. 10 (линия 50), вторым звеном 9 - на фиг, 11 (линия 51)Для обработки детали программа,определяющая форму детали, по каналам 11 и 12 вводится в устройство 13кодирования и подготовки данных ипоступает на сумматоры 15 и 16 и навходы устройства 29. На выходе уст",ройства 29 выбираются коды погрешности в зависимости от программируемыхперемещений ах(х ) и Ь 3(Б ). Этизависимости по каналам 30 и 31 подаются на вычитающие входы сумматоров 15 и 16, В результате по каналам 17 и 18 в устройство 1 ЧПУ вводятся коды скорректированного программируемого перемещения Хдлязвена 8 и П,р для звена 9 и определяются выражениямих= хр -ах,Нкпр = Ппр арфВведение таких поправок позволяеткорректировать ошибки не толькосинхронного, но и произвольных относительно перемещений исполнительныхзвеньев.Использование изобретения позво.ляет повысить точность коррекции погрешности взаимного перемещения двухили нескольких звеньев, управляемыхпо программе.Формула изобретенияСпособ коррекции ошибки следящего привода с управляемыми звеньями в системах программного управления, содержащий измерение и регистрацию сигнала ошибки при воспроизведении программы и введение корректирующегосигнала в программу управления исполнительными механизмами, о т л ич а ю щ и й с я тем, что, с цельюповышения точности коррекции относительно перемещения управляемых звеньев, для формирования каждого отдельного корректирующего сигнала до начала отработки технологической программы перемещают синхронно первое ивторое управляемые звенья, сигналзарегистрированной ошибки несинхронности их перемещения раскладывают 15на гармонические составляющие, возвращают звенья в исходное положение,сдвигают второе звено относительнопервого на половину периода корректируемой составляющей, в новом относительном положении звеньев аналогично регистрируют ошибку несинхронности их перемещения и также раскладывают сигнал этой ошибки на гармонические составляющие, из которых выделяют одноименную корректируемой, асоответствующий корректирующий гармонический сигнал формируют по егокоэффициентам Фурье, определяя ихдля корректирующего гармонического 30сигнала первого звена как полусумму,а для второго звена - как полураэность коэффициентов Фурье одноименныхсоставляющих первого измерения и соответствующего иэ повторных измеренийсо знаком, обратным для данного звена знаку, с которым учитывалось егоперемещение при определении несинх-ронности.1352455 Составитель А.ИсправниковаРедактор Л.Повхан Техред А,Кравчук Корректор В,Гирняк 565/47 Зака Ужгород, ул, Проектная, 4 оизводственно-полиграФическое предприяти Т ВНИИПИ Госу по делам 113035, Москвааж 863 Подписнрственного комитета СССРобретений и открытийЖ, Раушская наб., д. 4
СмотретьЗаявка
3874929, 26.03.1985
САРАТОВСКОЕ СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ЗУБООБРАБАТЫВАЮЩИХ СТАНКОВ
АРСЕНОВ СЕРГЕЙ АНТОНОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: звеньями, коррекции, ошибки, привода, программного, системах, следящего, управляемыми
Опубликовано: 15.11.1987
Код ссылки
<a href="https://patents.su/6-1352455-sposob-korrekcii-oshibki-sledyashhego-privoda-s-upravlyaemymi-zvenyami-v-sistemakh-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ коррекции ошибки следящего привода с управляемыми звеньями в системах программного управления</a>
Устройство для перемещения звеньев путевой решетки на звеноразборочных, звеносборочных и ремонтных линиях

Номер патента: 717207
Опубликовано: 25.02.1980
Автор: Якимов
МПК: E01B 29/24
Метки: звеноразборочных, звеносборочных, звеньев, линиях, перемещения, путевой, ремонтных, решетки
...продольныхбалок 4 закреплены кронштейны 10 сшарнирно установленными на них толкателями 11, переходящими в зубчатую рейку, входящую в зацепление с шестерней 12, свободно вращающейся наприводном валу 13 конвейера подводазвеньев, состоящего из рамы 14 и цепей18, накинутых на систему звездочек.На концах приводного вала 13 жестконасажены храповые колеса 16, взаимодействующие с собачками 17, шарнирнозакрепленными на шестернях 12.При подаче рабочей жидкости в однуиз полостей цилиндров 1, например, вправую (по чертежу), подвижные гильзыперемешают раму 2 вперед, причем в силуэксцентричности посадки роликов 6 истягивания их пружинами 9 через кронштейны 8 происходит самозаклиниваниеголовок рельсов и протягивание звена навеличину хода поршня...
Фотоэлектрический блок к устройству для измерения перемещений

Номер патента: 763680
Опубликовано: 15.09.1980
Авторы: Александров, Бондарев, Боримский, Горбань, Платонов, Шкуропадский
МПК: G01B 21/00
Метки: блок, перемещений, устройству, фотоэлектрический
...блока к устройствУдля измерения тн:ремещений.Блок содержит фотоэлектрические преобразователи, выполненные в виде фазосдвигаю10 Формула изобретения акаэ 6267134Подписное ИИПИраж 80 Филиал ППП "Патент", жгород, ул. Проектн 3 76368ших лементов 1, 2, состоящих иэ двух сим.меричных многозвенных структур, включенных по балансной схеме и образованных иээлементарных цепочек, включающих фотоем.кости или фоторезисторы 3, 4, высокочастот 5ный генератор 5, источник 6 постоянного напряжения, фазометр 7, соединенный входамис выходами фотоэлектрических преобразователей,и резисторы 8 и 9,На чертеже так же условно изображеныосветитель 10, отражатель 11, соединяемыйс контролируемым объектом, и призма 12оптической системы устройства.Фотоэлектрический...
Установка к ленточному прессу для отрезки нескольких фасонных блоков и их перемещения

Номер патента: 136217
Опубликовано: 01.01.1961
Авторы: Блюменкранц, Скворцов
МПК: B28B 11/16, B28B 17/00
Метки: блоков, ленточному, нескольких, отрезки, перемещения, прессу, фасонных
...отрезки цзделцй и не обеспеч 1.вают их подачи на разгрузочный транспортер.В списываемой установке эти недостатки устранены. Это обеспечивается тем, что рамка отрезного аппарата оборудуется щечцым захватом, который одновремено с окончанием реза з.;,жимает изделие е боковых сторон,На фиг, 1 изображен общий вид установки в двух проекциях; на фиг. 2 - кинсматическая схема; ца фш. 3 - механизм зажима,На столе 1 автомата установлена колонна 2, вокруг которой поворачивается хобот 3 с двумя возвратно-цоступательно перемещающимися в направляющих 4 каретками 5, Капетки, несущие фасонные плоские ножи б, соединены между собой осью 7, которую перемещает рычаг о, Привод рычага о осуществляется кривошипно-шатунцым механизмом 9, взаимодействующим...
Устройство для перемещения блок-форм в скороморозильных аппаратах

Номер патента: 360528
Опубликовано: 01.01.1972
Автор: Старых
МПК: F25D 25/04
Метки: аппаратах, блок-форм, перемещения, скороморозильных
...ттеревода блок-форм 1 с я 1 руса на ярус.Предлагаемое устройство имеет более простое конструктивное выполнение и надежнее в работе. Это достигается тем, что шарниры, соединяющие целиной конвейер с блок-форма ми, расположеиьт,по продольной оси последних, а приепособление для перевода блокформ,с яруса иа ярус образовано двумя копирами, устантхвленными с наружной стороны звездочек конвейера и ихтеющих выемки для захода и фи 1 ксации роликов блок-форм.На фиг. 1 схеыатичегзки изображено предлагаемое устройство; на фиг. 2 - вид по стрелке А на фиг, 1.Устройство состоит из многоярусного цепного конвейера 1, направляющих 2 для перемещения роликов 3 блок-форм 4 и приспособления для,перевода блок-форм с яруса на ярус, образованного двумя копирами...
Устройство для перемещения и центрирования блоков корпусов судов на степеле

Номер патента: 460207
Опубликовано: 15.02.1975
Авторы: Каминкер, Латман, Мандельблат, Народецкий, Стесель, Струц
МПК: B63C 5/02
Метки: блоков, корпусов, перемещения, степеле, судов, центрирования
...установлены центрирующие опоры.На фиг. 1 схематически изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, разрез по А - А на фиг, 2.Устройство выполнено в виде тележки с основанием 1, установленным на катки 2, и с вмонтированными в основание гидродомкратами 3, На основании, в местах установки гидродомкратов, укреплены направляющие 4, в которых установлены промежуточные штоки 5, нижние концы которых опираются на головки 6 плунжеров гидродомкратов, а на верхних установлены центрирующие опоры, содержащие нижние плиты 7, шары 8, регулировочные центрирующие винты 9 и опорные части 10.Гидродомкраты снабжены автономными насосами 11, а верхние концы промежуточных штоков выполнены с резьбой и...
Предыдущий патент: Самонастраивающийся электропривод
Следующий патент: Рецепторный датчик положения обучаемой системы управления
Случайный патент: Устройство для измерений изменений уровня в каналах связи